In order to improve the real-time performance and solution accuracy of star sensor, based on multi-vector information, a quaternion representation method for solving three-axis rotation angle of star sensor was proposed, and the method was derived in detail theoretically. Based on the three-dimensional coordinates of a single starlight vector in celestial coordinate system and star sensor coordinate system, the direction cosine matrix transformation form was transformed into quaternion transformation form. The quadratic quaternion transformation form was reduced in order to facilitate the subsequent solution. Considering the weight of different starlight vectors, the information of all starlight vectors was combined to solve the three-axis rotation angle of the star sensor. A specific solution was given, aiming at the iteration uncertainty and the direction singularity of quaternion vector in the process of solving three-axis rotation angle, The performance of the proposed algorithm was compared with that of the traditional algorithm. Simulation results show that the proposed algorithm has faster solving speed and higher accuracy in solving three-axis rotation angle than the traditional algorithm.
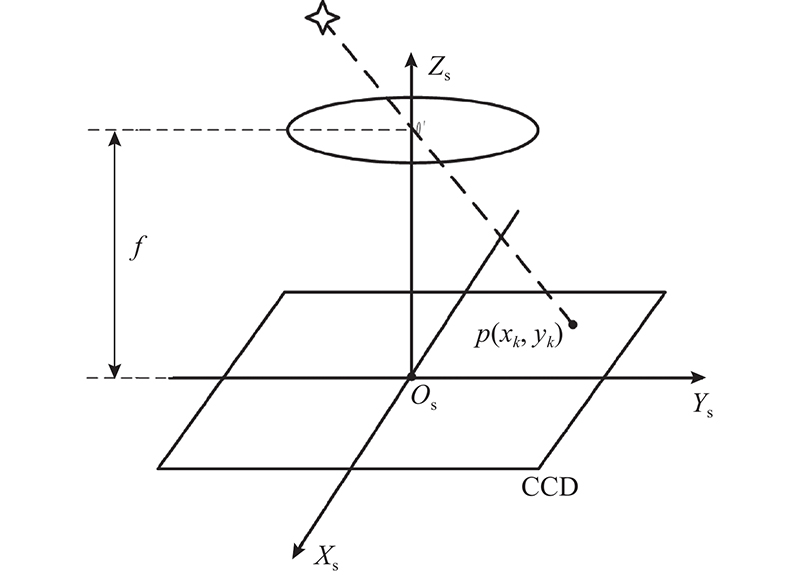
Fig.1Schematic diagram of starlight vector imaging
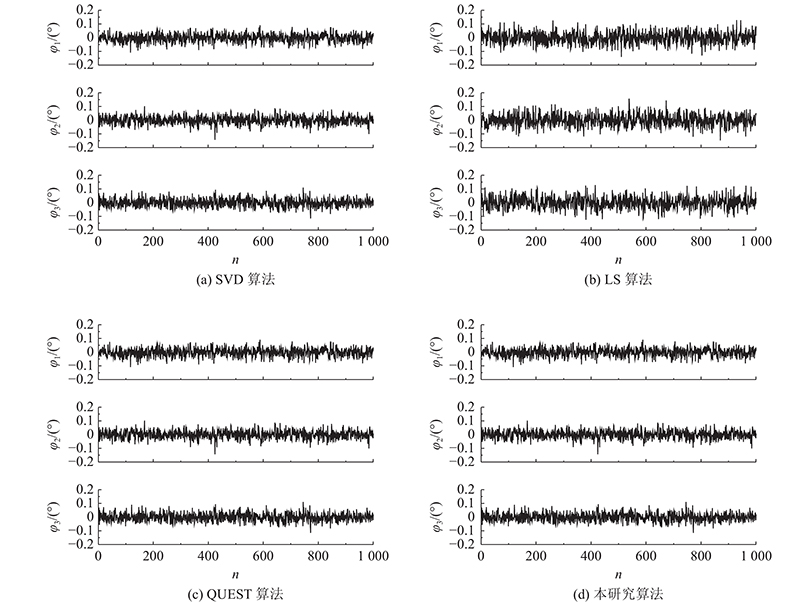
Fig.2Three-axis attitude angle error curve of different algorithms under 1.0×10−3 standard deviation of noise
算法
σA/(°)
σs=1.0×10?2
σs=1.0×10?3
σs=1.0×10?4
σs=1.0×10?5
SVD
2.071×10?1
2.751×10?2
3.084×10?3
4.055×10?4
LS
3.679×10?1
3.794×10?2
4.286×10?3
4.622×10?4
QUEST
2.071×10?1
2.751×10?2
3.084×10?3
4.055×10?4
本研究
2.071×10?1
2.751×10?2
3.084×10?3
4.055×10?4
Tab.1Standard deviation of attitude angle error for different algorithms with different noise standard deviations
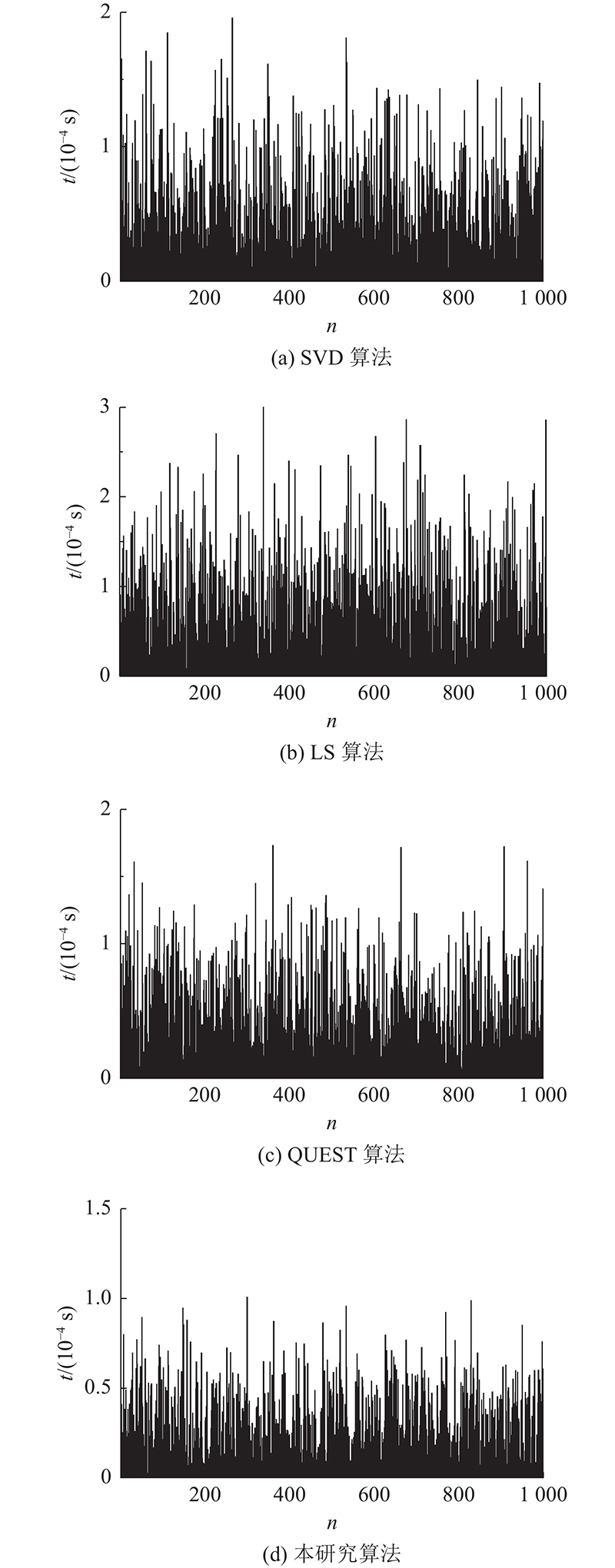
Fig.3Time consumption curve of different algorithms under 1.0×10−3 standard deviation of noise
算法
t/s
σs=1×10?2
σs=1×10?3
σs=1×10?4
σs=1×10?5
SVD
6.021×10?5
5.971×10?5
6.153×10?5
6.568×10?5
LS
9.354×10?5
9.219×10?5
9.612×10?5
9.674×10?5
QUEST
5.721×10?5
5.671×10?5
5.953×10?5
5.368×10?5
本研究
3.284×10?5
3.322×10?5
3.268×10?5
3.109×10?5
Tab.2Time-consuming table for different algorithms with different noise standard deviations
[1]
CHANG L B, QIN F J, LI A A novel backtracking scheme for attitude determination-based initial alignment[J]. IEEE Transactions on Automation Science and Engineering, 2015, 12 (1): 384- 390
doi: 10.1109/TASE.2014.2346581
[2]
DU S, GAO Y Inertial aided cycle slip detection and identification for integrated PPP GPS and INS[J]. Sensors, 2012, 12 (11): 14344- 14362
doi: 10.3390/s121114344
[3]
MARKLEY F L, MORTARI D How to estimate attitude from vector observations[J]. Advance Astronomy Science, 2000, 103: 1979- 1996
[4]
YANG Y, ZHOU Z An analytic solution to Wahba’s problem[J]. Aerospace Science and Technology, 2013, 30 (1): 46- 49
doi: 10.1016/j.ast.2013.07.002
[5]
SHUSTER M D, OH S D Three-axis attitude determination from vector observations[J]. Journal of Guidance Control, 1981, 4 (1): 70- 77
doi: 10.2514/3.19717
[6]
MORTARI D ESOQ: a closed-form solution to the Wahba problem[J]. The Journal of the Astronomy Sciences, 1997, 45: 195- 204
[7]
HORN R A, JOHNSON C R. Matrix analysis [M]. Cambridge: Cambridge University Press, 1985: 57-73.
[8]
FARRELL J L, STUELPNAGEL J C, WESSNER R H, et al A least squares estimate of spacecraft attitude[J]. SIAM Review, 1966, 8 (3): 384- 386
doi: 10.1137/1008080
[9]
ZHANG Y J, ZHENG M T, XIONG J X, et al On-orbit geometric calibration of ZY-3 three-linear array imagery with multistrip data sets[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52 (1): 224- 234
doi: 10.1109/TGRS.2013.2237781
[10]
RATNAWEERA A, HALGAMUGE S K, WATSON H C Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[J]. IEEE Transactions on Evolutionary Computation, 2004, 8 (3): 240- 255
doi: 10.1109/TEVC.2004.826071
[11]
WU J, ZHOU Z B, GAO B, et al Fast linear quaternion attitude estimator using vector observations[J]. IEEE Transactions on Automation Science and Engineering, 2018, 15 (1): 307- 319
doi: 10.1109/TASE.2017.2699221
[12]
LUO L, HUANG Y L, ZHANG Z, et al A position loci-based in-motion initial alignment method for low-cost attitude and heading reference system[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 7500618
[13]
ZHOU X R, XU X, YAO Y Q, et al A robust quaternion Kalman filter method for MIMU/GPS in-motion alignment[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 8503109
[14]
FRASER C S, HANLEY H B Bias compensation in rational functions for Ikonos satellite imagery[J]. Photogrammetric Engineering and Remote Sensing, 2003, 69 (1): 53- 57
doi: 10.14358/PERS.69.1.53
[15]
WU Y H, GAO Y, LIN J W, et al Low-cost, high-performance monocular vision system for air bearing table attitude determination[J]. Journal of Spacecraft and Rockets, 2014, 51 (1): 66- 75
doi: 10.2514/1.A32465
WU J, ZHOU Z B, FOURATE H, et al Generalized linear quaternion complementary filter for attitude estimation from multisensor observations: an optimization approach[J]. IEEE Transactions on Automation Science and Engineering, 2019, 16 (3): 1330- 1343
doi: 10.1109/TASE.2018.2888908
[18]
ZHANG G, JIANG Y H, LI D, et al In-orbit geometric calibration and validation of ZY-3 linear array sensors[J]. The Photogrammetric Record, 2014, 29 (145): 68- 88
doi: 10.1111/phor.12052
[19]
LEFFERTS E J, MARKLEY F L, SHUSTER M D Kalman filtering for spacecraft attitude estimation[J]. Journal of Guidance, 1982, 5 (5): 417- 429
doi: 10.2514/3.56190
[20]
LI J C, GAO W, ZHANG Y, et al Gradient descent optimization-based self-alignment method for stationary SINS[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68 (9): 3278- 3286
doi: 10.1109/TIM.2018.2878071
[21]
MORTARI D, ROMOLI A. StarNav III: a three field of view star tracker [C]// IEEE Aerospace Conference Proceeding. Big Sky: IEEE, 2002: 47-67.
[22]
DOUIK A, LIU X, BALLAL T, et al Precise 3-D GNSS attitude determination based on Riemannian manifold optimization algorithms[J]. IEEE Transactions on Signal Processing, 2020, 68: 284- 299
doi: 10.1109/TSP.2019.2959226
[23]
COLE C L, CRASSIDIS J L Fast star-pattern recognition using planar triangles[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (1): 64- 71
[24]
LIEBE C C Star trackers for attitude determination[J]. IEEE Aerospace and Electronic Systems Magazine, 1995, 10 (6): 10- 16
doi: 10.1109/62.387971
[25]
KUDVA P, THROCKMORTON A Attitude determination studies for the earth observation system AM1 (EOS-AM1) mission[J]. Journal of Guidance, Control, and Dynamic, 1996, 19 (6): 1326- 1331
doi: 10.2514/3.21789