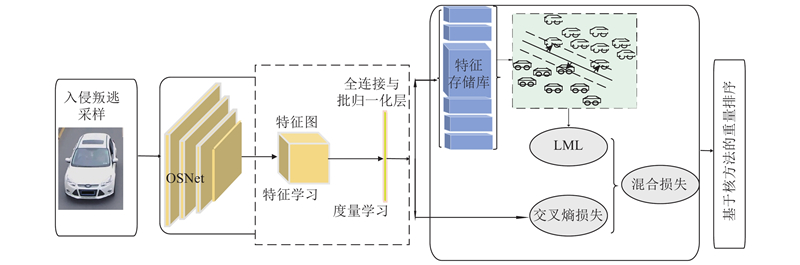
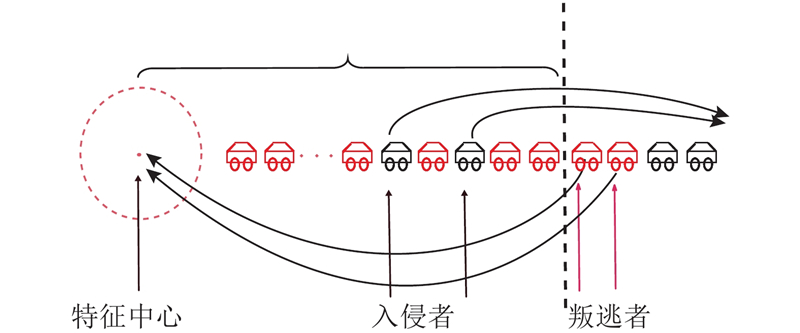
In the present vehicle re-identification methods, it is hard to separate the samples near the decision boundaries in the embedding feature space because of the multi-view vehicle appearance. A large margin metric learning method was proposed to tackle the above problem. In the representation stage, a large margin loss function was presented to tackle the identity confusion issue among similar vehicles effectively. Meanwhile, an invader-defector sampler was adopted, which was used to find the hard samples in the training dataset to train the network specifically and speed up the training process. A kernelized re-rank method was adopted to further enhance the re-identification performance in the retrieval stage. Experiments on three common databases show that the proposed method can achieve a higher vehicle re-identification accuracy, and at the same time the time cost of training and the inference procedure are improved. Theoretical analysis and experiments also indicate that, the large margin metric learning method can mine the hard samples near the decision boundaries, and can solve the multi-view issue in the vehicle re-identification domain.
Fig.1Overall network structure of large margin metric learning
Fig.2Decision boundary in two dimensional feature space between different samples
Fig.3Large margin metric learning example
Fig.4Invader-defector sampling strategy
数据库
方法
Rank1
Rank5
mAP
Veri-776
Res
94.35
97.30
72.10
OS
94.61
97.50
72.50
OS+BN
95.40
97.90
74.50
OS+BN+LML
95.60
97.95
75.10
OS+BN+LML+IDS
96.45
98.68
80.55
OS+BN+LML+IDS+KER
96.81
98.95
80.95
VehicleID
Res
85.45
94.93
77.22
OS
85.62
95.05
77.41
OS+BN
85.92
95.12
78.45
OS+BN+LML
85.95
95.15
80.58
OS+BN+LML+IDS
88.25
97.45
86.88
OS+BN+LML+IDS+KER
88.35
98.22
88.78
Tab.1Ablation study on different datasets
Fig.5Visualization of vehicle embedding features in three dimensional space
方法
mAP
Rank1
Rank5
QD-DLF[11]
61.83
88.50
94.40
Part-Reg[10]
74.30
94.30
98.70
AAVER[9]
61.20
88.97
94.70
GSTE[6]
59.40
96.24
98.97
VANet[8]
66.34
89.78
95.99
LML(IDS)
80.55
96.45
98.68
LML(IDS)+KER
80.95
96.81
98.95
Tab.2Accuracy comparison of proposed method with other methods on Veri-776 dataset
方法
Small
Medium
Large
mAP
Rank1
mAP
Rank1
mAP
Rank1
QD-DLF[11]
?
74.69
?
68.62
?
63.54
Part-Reg[10]
76.54
72.32
74.63
70.66
68.41
64.14
AAVER[9]
61.50
78.40
?
75.00
?
74.20
GSTE[6]
75.40
75.90
74.30
74.80
72.40
74.00
VANet[8]
?
88.12
?
83.17
?
80.35
LML(IDS)
86.60
88.25
83.55
83.42
78.38
80.33
LML(IDS)+ KER
88.75
88.31
84.45
83.85
80.68
80.75
Tab.3Accuracy comparison of proposed method with other methods on VehicleID dataset
方法
Small
Medium
Large
mAP
Rank1
mAP
Rank1
mAP
Rank1
DRDL[21]
22.50
57.00
19.30
51.90
14.80
44.60
FDA-Net[18]
35.10
64.00
29.80
57.80
68.41
49.40
MLSL[22]
46.30
78.40
42.40
83.00
22.80
77.50
LML(IDS)
86.47
95.94
82.85
94.61
76.63
90.75
LML(IDS)+ KER
87.45
96.28
83.35
95.15
77.35
91.85
Tab.4Accuracy comparison of proposed method with other methods on VERI-Wild dataset
Fig.6Visualization of retrieval results
Fig.7Failure case analysis of vehicle retrieval
方法
mAP
p /M
e
v /(ms·image?1)
QD-DLF[11]
61.83
24
?
11.19
Part-Reg[10]
74.30
48
130
?
AAVER[9]
61.20
48
120
?
GSTE[6]
59.40
24
?
?
VANet[8]
66.34
24
200
?
LML(Res,Hard)
80.35
24
150
1.67
LML(Res,IDS)
80.50
24
110
1.67
LML(OS,Hard)
80.46
2.7
150
1.12
LML(OS,IDS)
80.55
2.7
110
1.12
Tab.5Time efficiency comparison of proposed method with other methods
[1]
LIU X C, LIU W, MA H D, et al. Large-scale vehicle re-identification in urban surveillance videos [C]// IEEE International Conference on Multimedia and Expo. Seattle: IEEE, 2016: 1-6.
[2]
LIU X C. A deep learning-based approach to progressive vehicle re-identification for urban surveillance [C]// 2016 European Conference on Computer Vision. Netherlands: Springer, 2016: 869-884.
[3]
ZHANG Y, LIU D, ZHA Z J. Improving triplet-wise training of convolutional neural network for vehicle re-identification [C]// 2017 IEEE International Conference on Multimedia and Expo. Hongkong: IEEE, 2017: 1386-1391.
[4]
ZHOU K Y, YANG Y X, CAVALLARO A, et al. Omni-scale feature learning for person re-identification [C]// 2019 International Conference of Computer Vision. Seoul: IEEE, 2019: 3701-3711.
[5]
HE K M, ZHANG X Y. Deep residual learning for image recognition [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Nevada: IEEE, 2016: 770-778.
[6]
BAI Y, LOU Y H, GAO F, et al Group-sensitive triplet embedding for vehicle re-identification[J]. IEEE Transactions on Multimedia, 2018, 2385- 2399
[7]
SIMONYAN K, ZISSERME N. Very deep convolutional networks for largescale image recognition [C]// 2015 International Conference on Learning Representations. San Diego: IEEE, 2015: 1-14.
[8]
CHU R H, SUN Y F. Vehicle re-identification with viewpoint-aware metric learning [C]// 2019 International Conference of Computer Vision. Seoul: IEEE, 2019: 8281-8290.
[9]
PIRAZ K. A dual-path model with adaptive attention for vehicle re-identification [C]// 2019 International Conference of Computer Vision. Seoul: IEEE, 2019: 6131-6140.
[10]
HE B. Part-regularized near-duplicate vehicle re-identification [C]// 2019 International Conference of Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 3992-4000.
[11]
ZHU J Q Vehicle re-identification using quadruple directional deep learning features[J]. IEEE Transactions on Intelligent Transportation System, 2019, 21 (1): 410- 420
[12]
GUO H, ZHAO C. Learning coarse-to-fine structured feature embedding for vehicle re-identification [C]// 2018 the 32nd AAAI Conference on Artificial Intelligence. New Orleans: AAAI, 2018: 6853-6860.
[13]
ZHENG Z, ZHENG L, YANG Y A discriminatively learned cnn embedding for personre-identification[J]. ACM Transactions on Multime-dia Computing, Communications, and Applications, 2017, 14 (1): 1- 20
[14]
LIU X, LIU W Provid: progressive and multimodal vehicle reidentification for large-scale urban surveillance[J]. IEEE Transactions on Multimedia, 2018, 20 (3): 645- 658
doi: 10.1109/TMM.2017.2751966
[15]
YU R, DOU Z, BAI S Hard-aware point-to-set deep metric for person re-identification[J]. Lecture Notes in Computer Science, 2018, 196- 212
ZHONG Z, ZHENG L. Re-ranking person re-identification with k-reciprocal encoding [C]// 2017 International Conference of Computer Vision and Pattern Recognition. Honolulu: IEEE, 2019: 3652-3661.
[18]
LOU Y, BAI Y. Veri-wild: a large dataset and anew method for vehicle re-identification in the wild [C]// 2019 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2019: 3230-3238.
[19]
LIU H, TIAN Y. Deep relative distance learning: tell the difference between similar vehicles [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2019: 2167–2175.
[20]
MAATEN L, HINTON G Visualizing data using t-SNE[J]. Journal of Machine Learning Review, 2008, 9: 2579- 2605
[21]
LIU Y, TIAN Y. Deep relative distance learning: tell the difference between similar vehicles [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2019: 2167-2175.