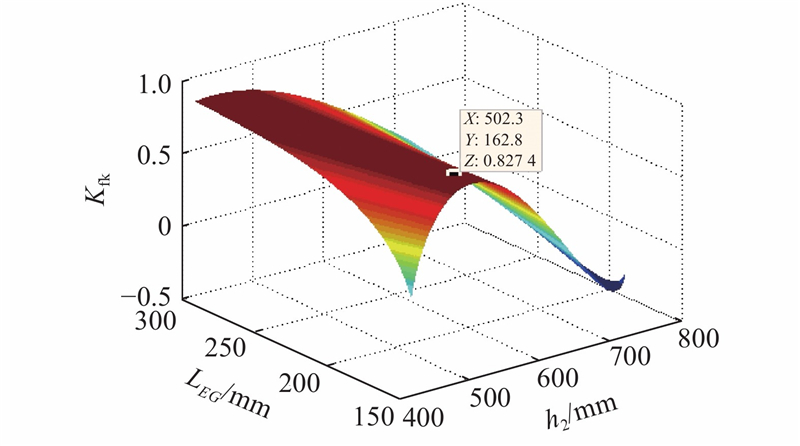
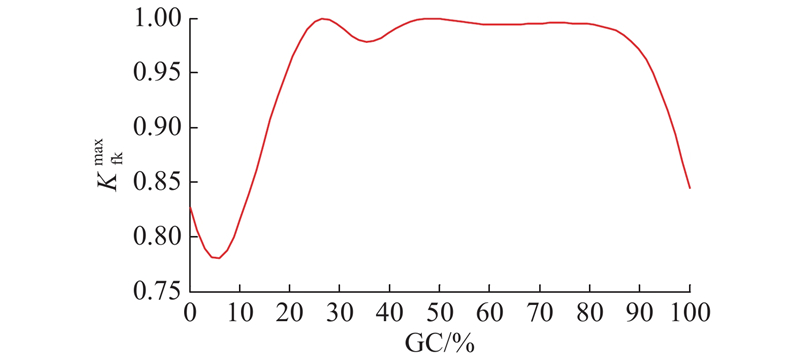
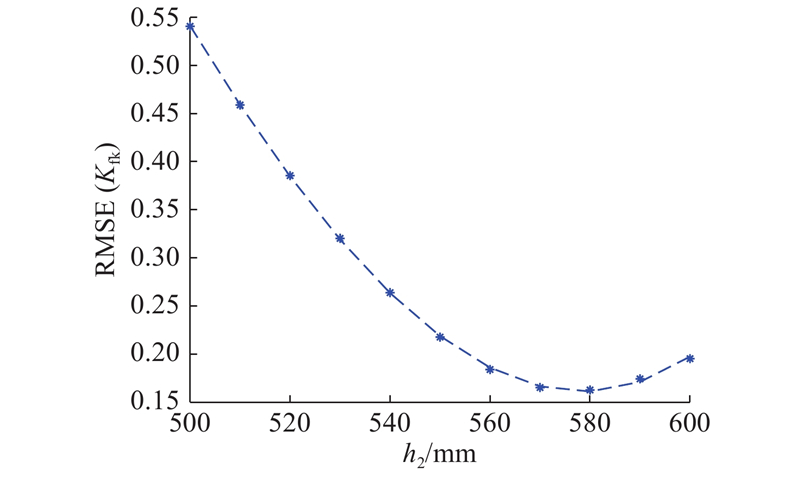
为了得到最优参数,须推导出下推杆长度、下驱动件安装高度和膝关节推力系数三者的具体关系. 由上述分析可知, ${K_{{\rm{fk}}}} \!=\! F(\alpha ,\;\beta ,\;{\theta _4})$ ${\theta _4} \!=\! F(\alpha ,\;\!\beta ,\;{h_2},\;{L_{EG}})$ $K = F({h_2},{L_{EG}})$ ${K_{{\rm{fk}}}} = F({h_2},\;{L_{EG}})$ 图3 中人正常步态下的关节角度数据,确定初始状态髋关节、膝关节的角度分别为−2.4°、46.7°. 考虑到实际安装情况,下驱动件安装高度限制为400~800 mm,小腿推杆长度限制为150~300 mm,得到三者的初步关系如图6 所示. 可以看出,小腿推杆长度对膝关节推力系数基本没有影响,在后续分析中将其视为固定,固定为162.80 mm. 下驱动件安装高度为最主要影响因素,上述分析是在初始步态下进行的,而实际上,由于步态运动的非线性,在整个步态周期内,结构参数对推力系数的影响也是非线性的. 为了综合分析结构参数对推力系统的影响,下面针对整个步态周期具体分析下驱动件安装高度对膝关节推力系数的影响情况.
[1]
BOUDARHAM J, ROCHE N, PRADON D, et al Variations in kinematics during clinical gait analysis in stroke patients
[J]. Plos One , 2013 , 8 (6 ): 1 - 9
[本文引用: 1]
[2]
KAWAMOTO H, KAMIBAYASHI K, NAKATA Y, et al Pilot study of locomotion improvement using hybrid assistive limb in chronic stroke patients
[J]. BMC Neurology , 2013 , 13 (1 ): 141 - 148
DOI:10.1186/1471-2377-13-141
[3]
穆光宗 我国机构养老发展的困境与对策
[J]. 华中师范大学学报人文社会科学版 , 2012 , 51 (2 ): 31 - 38
[本文引用: 1]
MU Guang-zong The difficulties and countermeasures of institutional pension development in China
[J]. Journal of Huazhong Normal University: Humanities and Social Sciences , 2012 , 51 (2 ): 31 - 38
[本文引用: 1]
[4]
秦涛, 张立勋 考虑跖趾关节运动的踏板式步行康复机器人运动规划
[J]. 机器人 , 2014 , 36 (3 ): 330 - 336
[本文引用: 1]
QIN Tao, ZHANG Li-xun Motion planning of a footpad-type walking rehabilition robot considering motion of metatarsophalangeal joint
[J]. Robot , 2014 , 36 (3 ): 330 - 336
[本文引用: 1]
[5]
徐国政, 宋爱国, 高翔 基于混杂理论的机器人辅助康复治疗控制方法
[J]. 机器人 , 2014 , 36 (6 ): 641 - 646
[本文引用: 1]
XU Guo-zheng, SONG Ai-guo, GAO Xiang Therapeutic control method for robotic-aided rehabilitation training based on hybrid theory
[J]. Robot , 2014 , 36 (6 ): 641 - 646
[本文引用: 1]
[6]
SHIBENDU S R, DILIP K P Kinematics, dynamics and power consumption analyses for turning motion of a six-legged robot
[J]. Journal of Intelligent and Robotic Systems , 2014 , 74 (3/4 ): 663 - 688
[本文引用: 1]
[7]
魏小东, 孟青云, 喻洪流, 等 下肢外骨骼机器人研究进展
[J]. 中国康复医学杂志 , 2019 , 34 (4 ): 491 - 495
DOI:10.3969/j.issn.1001-1242.2019.04.025
[本文引用: 1]
WEI Xiao-dong, MENG qing-yun, YU Hong-liu, et al Research progress of lower limb exoskeleton robot
[J]. Chinese Journal of Rehabilitation Medicine , 2019 , 34 (4 ): 491 - 495
DOI:10.3969/j.issn.1001-1242.2019.04.025
[本文引用: 1]
[8]
KAWAMOTO H. Power assist method for HAL-3 using EMG-based feedback controller [C]// IEEE International Conference on Systems, Man and Cybernetics . Manchester: IEEE, 2003: 1648-1653.
[本文引用: 1]
[9]
VAN A, EKKELENKAMP R, VENEMAN J F, et al. Selective control of a subtask of walking in arobotic gait trainer (LOPES) [C]// IEEE 10th International Conference on Rehabilitation Robotics . Noordwijk: IEEE, 2007: 841-848.
[本文引用: 1]
[10]
范伯骞. 液压驱动下肢外骨骼机器人关键技术研究[D]. 杭州: 浙江大学, 2017.
[本文引用: 1]
FAN Bo-qian. Research on the key technologies of the hydraulic lower limb exoskeleton robot [D]. Hangzhou: Zhejiang University, 2017.
[本文引用: 1]
[11]
麻天照. 下肢外骨骼康复机器人控制系统设计与研究[D]. 成都: 电子科技大学, 2015.
[本文引用: 1]
MA Tian-zhao. Research and design on control system of an lower limb rehabilitation robot [D]. Chendu: University of Electronic Science and Technology of China, 2015.
[本文引用: 1]
[12]
GUO B J, HAN J H, LI X P, et al A wearable somatosensory teaching device with adjustable operating force for gait rehabilitation training robot
[J]. Advances in Mechanical Engineering , 2017 , 9 (10 ): 1 - 14
[本文引用: 1]
[13]
LIU F Y, LU C Y, HE L Design and motion analysis of lower limbs in modular nursing bed
[J]. Journal of Engineering Design , 2014 , 21 (6 ): 583 - 588
[本文引用: 1]
[14]
汪步云, 王月朋, 梁艺, 等 下肢外骨骼助力机器人关节驱动设计及试验分析
[J]. 机械工程学报 , 2019 , 55 (23 ): 55 - 66
[本文引用: 1]
WANG Bu-yun, WANG Yue-peng, LIANG Yi, et al Design on articular motion and servo driving with experimental analysis for lower limb exoskeleton robot
[J]. Journal of Mechanical Engineering , 2019 , 55 (23 ): 55 - 66
[本文引用: 1]
[15]
LI W D, ZHANG H J, LI J, et al. An evaluation method of wearing comfort for exoskeleton robots [C]// IEEE International Conference on Robotics and Biomimetics . Kuala Lumpur: IEEE, 2018: 2439-2443.
[本文引用: 1]
[16]
LI W D, LI J, LI X, et al. Development of a parameter adaptation robot for lower limb rehabilitation [C]// IEEE International Conference on Cybernetics and Intelligent Systems and IEEE Conference on Robotics, Automation and Mechatronics . Bangkok: IEEE, 2019: 7-11.
[本文引用: 1]
[17]
ZHU Q H, CHEN Z L, LI W D, et al. Structure design and analysis of compliant human-machine interface mechanism for exoskeletons [C]// IEEE International Conference on Advanced Robotics and its Social Impacts . Austin: IEEE, 2017.
[本文引用: 1]
[18]
PENG L, HOU Z G, WANG W Q. Dynamic modeling and control of a parallel upper-limb rehabilitation robot [C]// IEEE/RAS-EMBS International Conference on Rehabilitation Robotics . Piscataway: IEEE, 2015: 532-537.
[本文引用: 1]
[19]
史小华, 王洪波, 孙利, 等 外骨骼型下肢康复机器人结构设计与动力学分析
[J]. 机械工程学报 , 2014 , 50 (3 ): 41 - 48
DOI:10.3901/JME.2014.03.041
[本文引用: 1]
SHI Xiao-hua, WANG Hong-bo, SUN Li, et al Design and dynamic analysis of an exoskeletal lower limbs rehabilitation robot
[J]. Journal of Mechanical Engineering , 2014 , 50 (3 ): 41 - 48
DOI:10.3901/JME.2014.03.041
[本文引用: 1]
[20]
张浩杰. 一种误差自适应的欠驱动康复训练机器人的研究[D]. 苏州: 苏州大学. 2019.
[本文引用: 2]
ZHANG Hao-jie. Research on an error adaptive under-actuated rehabilitation training robot [D]. Suzhou: Soochow University, 2019.
[本文引用: 2]
[21]
SCHMIDT H, HESSE S, BERNHARD R, et al HapticWalker: a novel haptic foot device
[J]. ACM Transactions on Applied Perception , 2005 , 2 (2 ): 166 - 180
DOI:10.1145/1060581.1060589
[本文引用: 1]
[22]
MARIANNE S, CARMEN K, FRIEDEMANN M, et al Comparison of orthostatic reactions of patients still unconscious within the first three months of brain injury on a tilt table with and without integrated stepping
[J]. Clinical Rehabilitation , 2008 , 22 : 1034 - 1041
DOI:10.1177/0269215508092821
[本文引用: 1]
[23]
HIDLER J, WISMAN W, NECKEL N Kinematic trajectories while walking within the lokomat robotic gait-orthosis
[J]. Clinical Biomechanics , 2008 , 23 (10 ): 1251 - 1259
DOI:10.1016/j.clinbiomech.2008.08.004
[本文引用: 1]
[24]
张浩杰, 李伟达, 李娟, 等 一种个体自适应康复训练机器人机构的研究
[J]. 机械与电子 , 2019 , 37 (3 ): 72 - 75
DOI:10.3969/j.issn.1001-2257.2019.03.017
[本文引用: 1]
ZHANG Hao-jie, LI Wei-da, LI Juan, et al Research on an individual adaptive rehabilitation training robot mechanism
[J]. Machinery and Electronics , 2019 , 37 (3 ): 72 - 75
DOI:10.3969/j.issn.1001-2257.2019.03.017
[本文引用: 1]
Variations in kinematics during clinical gait analysis in stroke patients
1
2013
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
Pilot study of locomotion improvement using hybrid assistive limb in chronic stroke patients
0
2013
我国机构养老发展的困境与对策
1
2012
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
我国机构养老发展的困境与对策
1
2012
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
考虑跖趾关节运动的踏板式步行康复机器人运动规划
1
2014
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
考虑跖趾关节运动的踏板式步行康复机器人运动规划
1
2014
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
基于混杂理论的机器人辅助康复治疗控制方法
1
2014
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
基于混杂理论的机器人辅助康复治疗控制方法
1
2014
... 我国老龄化逐渐加速. 在老年人中存在大量的下肢运动障碍患者,丧失了部分或全部的行走能力[1 -3 ] . 现代康复医学研究表明,这类患者不仅要及时接受手术或药物治疗,更重要的是要接受长期、科学的下肢步态康复训练[4 -5 ] ,这对行走能力的恢复十分关键. ...
Kinematics, dynamics and power consumption analyses for turning motion of a six-legged robot
1
2014
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
下肢外骨骼机器人研究进展
1
2019
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
下肢外骨骼机器人研究进展
1
2019
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
A wearable somatosensory teaching device with adjustable operating force for gait rehabilitation training robot
1
2017
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
Design and motion analysis of lower limbs in modular nursing bed
1
2014
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
下肢外骨骼助力机器人关节驱动设计及试验分析
1
2019
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
下肢外骨骼助力机器人关节驱动设计及试验分析
1
2019
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
1
... 康复训练机器人结合了机电一体化、机器人、康复医学、传感等学科的技术,国内外许多科研机构和公司已经成功地将其运用到康复训练中[6 -7 ] . 其中最具代表性的是穿戴式下肢外骨骼机器人,例如日本筑波大学的HAL外骨骼[8 ] 、荷兰特温特大学的LOPES下肢动力外骨骼[9 ] 、浙江大学的混合动力外骨骼机器人[10 ] 、电子科技大学的下肢外骨骼康复机器人[11 ] 等. 但是,在康复训练中发现,穿戴式下肢外骨骼机器人的关节与人体下肢的关节在位置上有较大偏差[12 -13 ] . 同时,外骨骼机器人为了有较简单的结构、较容易的控制方式,往往将机构各关节自由度有所简化[14 ] . 人机关节对中性差[15 ] 和人机自由度不匹配[16 ] 的问题往往依靠人体组织的柔性变形和人机连接机构的变形来弥补人体下肢和外骨骼之间的关节对准误差[17 ] ,势必会导致康复训练过程中,人机交互柔顺性差,从而引起人体不适[18 ] ,进而影响其康复训练的主动性和康复训练的效果. ...
外骨骼型下肢康复机器人结构设计与动力学分析
1
2014
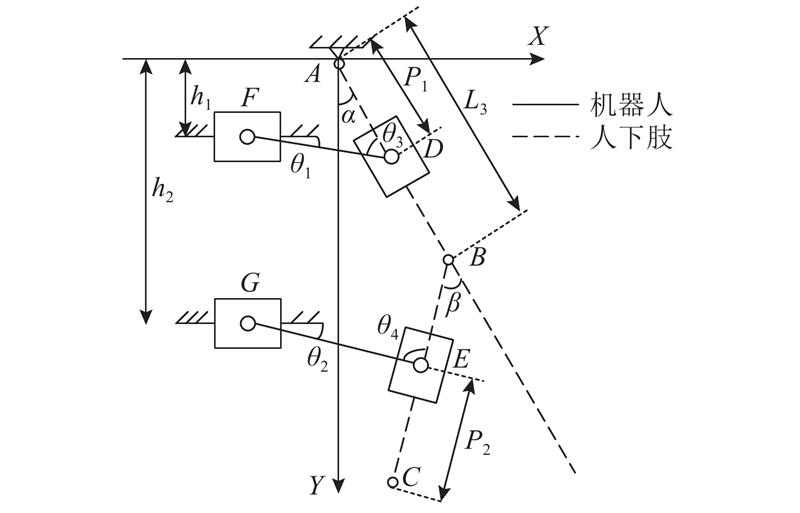
... 在欠驱动异构式康复机器人中,驱动并不直接作用于下肢,而是通过连杆传递后,驱动下肢关节运动. 为了分析康复训练过程中,作用于人体下肢关节的驱动力与机器人外部驱动力之间的关系,以及其与下肢各关节运动参数和机构几何参数之间的关系,须建立人机耦合模型动力模型[19 ] ,对力传递关系进行分析. 在本研究所设计的机器人构型中,患者的自重一方面通过悬吊减重系统进行减轻,另一方面依靠机器人在额状面内的人机接触力,而推杆式的构型主要是为了帮助患者在摆动相状态下完成矢状面内的步态运动,因此在建模过程中忽略站立相状态下患者与地面之间的相互作用力,进行动力学参数优化,以使机器人获得最佳的动力学特性. ...
外骨骼型下肢康复机器人结构设计与动力学分析
1
2014
... 在欠驱动异构式康复机器人中,驱动并不直接作用于下肢,而是通过连杆传递后,驱动下肢关节运动. 为了分析康复训练过程中,作用于人体下肢关节的驱动力与机器人外部驱动力之间的关系,以及其与下肢各关节运动参数和机构几何参数之间的关系,须建立人机耦合模型动力模型[19 ] ,对力传递关系进行分析. 在本研究所设计的机器人构型中,患者的自重一方面通过悬吊减重系统进行减轻,另一方面依靠机器人在额状面内的人机接触力,而推杆式的构型主要是为了帮助患者在摆动相状态下完成矢状面内的步态运动,因此在建模过程中忽略站立相状态下患者与地面之间的相互作用力,进行动力学参数优化,以使机器人获得最佳的动力学特性. ...
2
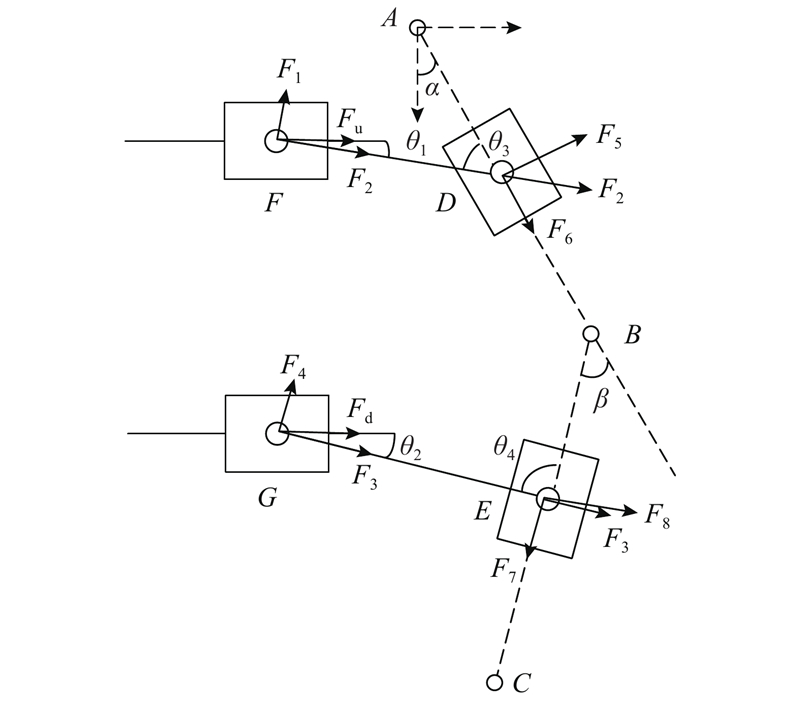
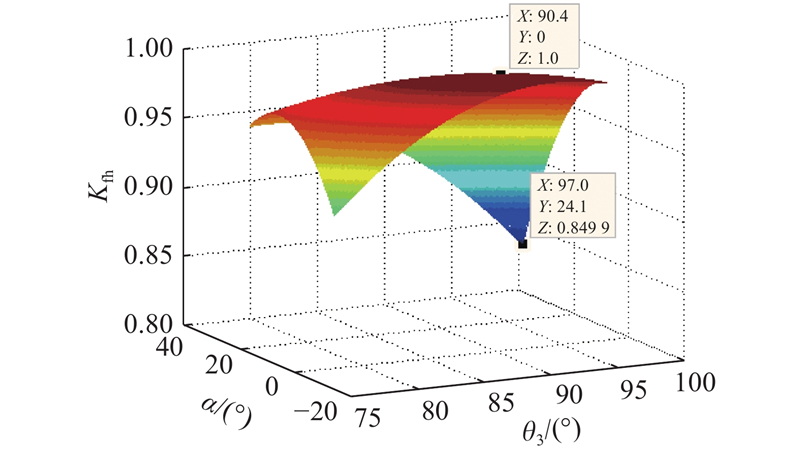
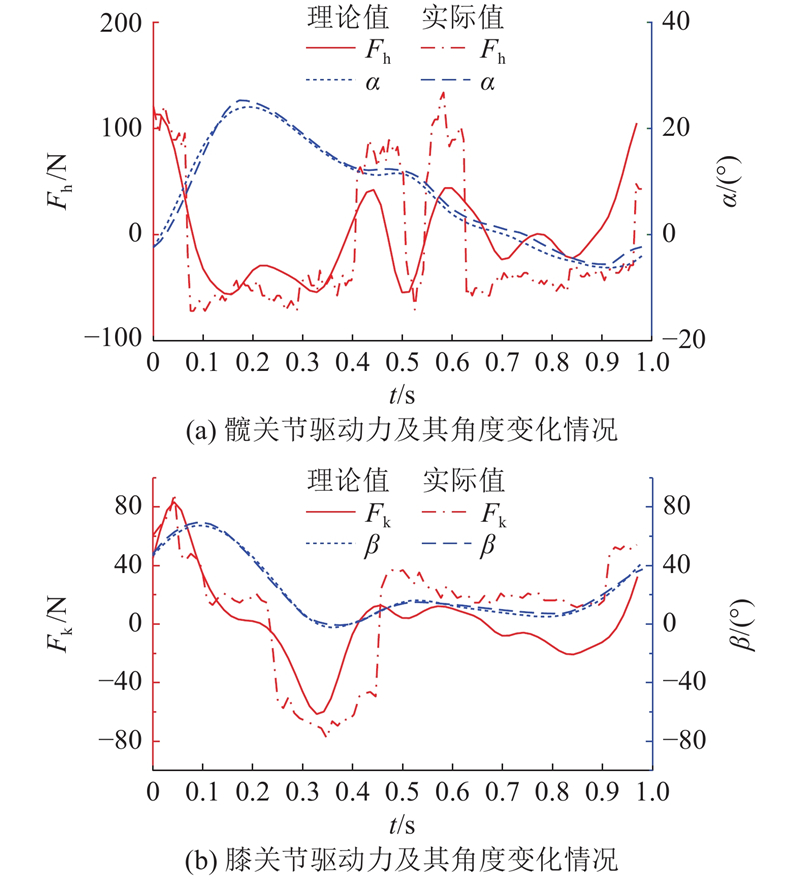
... 根据如图3 所示的人体平地行走时的髋关节与膝关节角度曲线[20 ] 可知,在正常步态下,完成一个步态周期大约需要0.98 s,人体髋关节角度 $\alpha $ ${\theta _3}$ 图2 中杆DF 的受力分析可得,提供大腿所需转矩的切向力F 5 和上驱动件水平推力之间的关系为 ...
... 同样的,对膝关节的有效驱动力进行分析. 由图3 可以看出,人正常行走步态下膝关节角度 $\;\beta $ [20 ] ,同样通过运动学关系可以算得小腿推杆和小腿长度指向膝关节方向夹角 ${\theta _4}$ ${\theta _4}$
2
... 根据如图3 所示的人体平地行走时的髋关节与膝关节角度曲线[20 ] 可知,在正常步态下,完成一个步态周期大约需要0.98 s,人体髋关节角度 $\alpha $ ${\theta _3}$ 图2 中杆DF 的受力分析可得,提供大腿所需转矩的切向力F 5 和上驱动件水平推力之间的关系为 ...
... 同样的,对膝关节的有效驱动力进行分析. 由图3 可以看出,人正常行走步态下膝关节角度 $\;\beta $ [20 ] ,同样通过运动学关系可以算得小腿推杆和小腿长度指向膝关节方向夹角 ${\theta _4}$ ${\theta _4}$
HapticWalker: a novel haptic foot device
1
2005
... 此外,对所设计的欠驱动下肢康复机器人与国内外典型的下肢康复机器人的主要性能参数进行对比,如表1 所示. 可以看出,Haptic-walker[21 ] 和Erigo[22 ] 实现步态训练主要以踝关节主动驱动为主,虽然Erigo还包含有一个髋关节的主动自由度,但2个系统均只能完成足部踏步式运动,与正常人体步态过程中人体肌肉的出力方式不同,不利于步态康复,此外,由于其膝关节都是处于被动驱动状态,没有考虑到人-机的关节对中性问题;Lokomat[23 ] 机器人跟本研究所设计的欠驱动机器人在驱动自由度方面是相似的,但由于其外骨骼式的构型,在实际穿戴时须根据穿戴者的下肢长度手动调节机器人杆长以实现关节对中,但人体肢体长度很难测量,因此很难实现关节对中;而本研究所采用的异构式推杆滑块结构可以自适应地实现关节对中,提高康复训练中人体的舒适性,并简化穿戴过程[24 ] . ...
Comparison of orthostatic reactions of patients still unconscious within the first three months of brain injury on a tilt table with and without integrated stepping
1
2008
... 此外,对所设计的欠驱动下肢康复机器人与国内外典型的下肢康复机器人的主要性能参数进行对比,如表1 所示. 可以看出,Haptic-walker[21 ] 和Erigo[22 ] 实现步态训练主要以踝关节主动驱动为主,虽然Erigo还包含有一个髋关节的主动自由度,但2个系统均只能完成足部踏步式运动,与正常人体步态过程中人体肌肉的出力方式不同,不利于步态康复,此外,由于其膝关节都是处于被动驱动状态,没有考虑到人-机的关节对中性问题;Lokomat[23 ] 机器人跟本研究所设计的欠驱动机器人在驱动自由度方面是相似的,但由于其外骨骼式的构型,在实际穿戴时须根据穿戴者的下肢长度手动调节机器人杆长以实现关节对中,但人体肢体长度很难测量,因此很难实现关节对中;而本研究所采用的异构式推杆滑块结构可以自适应地实现关节对中,提高康复训练中人体的舒适性,并简化穿戴过程[24 ] . ...
Kinematic trajectories while walking within the lokomat robotic gait-orthosis
1
2008
... 此外,对所设计的欠驱动下肢康复机器人与国内外典型的下肢康复机器人的主要性能参数进行对比,如表1 所示. 可以看出,Haptic-walker[21 ] 和Erigo[22 ] 实现步态训练主要以踝关节主动驱动为主,虽然Erigo还包含有一个髋关节的主动自由度,但2个系统均只能完成足部踏步式运动,与正常人体步态过程中人体肌肉的出力方式不同,不利于步态康复,此外,由于其膝关节都是处于被动驱动状态,没有考虑到人-机的关节对中性问题;Lokomat[23 ] 机器人跟本研究所设计的欠驱动机器人在驱动自由度方面是相似的,但由于其外骨骼式的构型,在实际穿戴时须根据穿戴者的下肢长度手动调节机器人杆长以实现关节对中,但人体肢体长度很难测量,因此很难实现关节对中;而本研究所采用的异构式推杆滑块结构可以自适应地实现关节对中,提高康复训练中人体的舒适性,并简化穿戴过程[24 ] . ...
一种个体自适应康复训练机器人机构的研究
1
2019
... 此外,对所设计的欠驱动下肢康复机器人与国内外典型的下肢康复机器人的主要性能参数进行对比,如表1 所示. 可以看出,Haptic-walker[21 ] 和Erigo[22 ] 实现步态训练主要以踝关节主动驱动为主,虽然Erigo还包含有一个髋关节的主动自由度,但2个系统均只能完成足部踏步式运动,与正常人体步态过程中人体肌肉的出力方式不同,不利于步态康复,此外,由于其膝关节都是处于被动驱动状态,没有考虑到人-机的关节对中性问题;Lokomat[23 ] 机器人跟本研究所设计的欠驱动机器人在驱动自由度方面是相似的,但由于其外骨骼式的构型,在实际穿戴时须根据穿戴者的下肢长度手动调节机器人杆长以实现关节对中,但人体肢体长度很难测量,因此很难实现关节对中;而本研究所采用的异构式推杆滑块结构可以自适应地实现关节对中,提高康复训练中人体的舒适性,并简化穿戴过程[24 ] . ...
一种个体自适应康复训练机器人机构的研究
1
2019
... 此外,对所设计的欠驱动下肢康复机器人与国内外典型的下肢康复机器人的主要性能参数进行对比,如表1 所示. 可以看出,Haptic-walker[21 ] 和Erigo[22 ] 实现步态训练主要以踝关节主动驱动为主,虽然Erigo还包含有一个髋关节的主动自由度,但2个系统均只能完成足部踏步式运动,与正常人体步态过程中人体肌肉的出力方式不同,不利于步态康复,此外,由于其膝关节都是处于被动驱动状态,没有考虑到人-机的关节对中性问题;Lokomat[23 ] 机器人跟本研究所设计的欠驱动机器人在驱动自由度方面是相似的,但由于其外骨骼式的构型,在实际穿戴时须根据穿戴者的下肢长度手动调节机器人杆长以实现关节对中,但人体肢体长度很难测量,因此很难实现关节对中;而本研究所采用的异构式推杆滑块结构可以自适应地实现关节对中,提高康复训练中人体的舒适性,并简化穿戴过程[24 ] . ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}