

本研究提出一种新的静力位移扩展方法来快速测量索杆张力结构的静力位移场. 首先,将贡献模态组合成Fisher信息阵,并基于Fisher信息阵行列式最大化原则提出相应的迭代策略来优选测点位置,以得到贡献模态组合系数的无偏估计. 其次,针对结构模态之间可能存在弱相关性的问题,提出一种提取严格正交基的主成分分析方法,以论证结构模态被选作自由度空间基向量的合理性. 最后,以某200 m跨环形张力罩棚结构[18]为例,针对所提方法阐述其使用流程,考察其扩展精度,并讨论其优缺点.
1. 静力位移的统一表达
文献[19]推导得出了索杆张力结构基于模态展开的静力位移统一表达公式,现简述如下.
在荷载p作用下,理想结构的静力位移
式中:
在相同荷载p作用下,实际结构的静力位移
式中:
根据式(1)、(2),由于在相同荷载p作用下,理想结构和实际结构的静力位移总是可以近似表达为少数贡献模态的线性组合,位移的变化主要体现在贡献模态组合系数的变化上. 若能基于少数测点的实测位移无偏估计真实的
2. 实际结构的静力位移扩展
采用矩阵和向量的形式来重新表达式(2):
式中:
可以认为由式(4)得到的
式中:
由式(5)对测量噪声的假定,贡献模态组合系数实测值
式中:
为了尽量减小实测值
式中:
由式(8)可知,自由度q对FIM的贡献为
根据式(9),计算所有自由度对FIM的贡献度,排序后将贡献度最小的自由度删除,再重新计算所保留自由度的FIM和其贡献度,并不断迭代,直到FIM保留的自由度数量等于预设的测点数量为止. 在确定好测点后,根据式(6)得到实测值
3. 静力位移扩展效果的评价指标
引入2种指标来衡量静力位移的扩展效果. 第一种是模态保证准则(modal assurance criterion,MAC)指标[21]. 该指标一般用于模态振型的相关性检验,可以用来衡量实际的完整位移
显然,MAC指标的值介于0~1. 当MAC=0时,
另外一种是误差范数(mean value of error-norm,MVE)指标,其值取为静力位移扩展绝对误差的欧几里得距离平均值,即
MVE值越小,静力位移的扩展精度越高. 当MVE=0时,
4. 结构模态的主成分分析
文献[19]在推导静力位移的统一表达公式时假设
式中:
假设共有l阶特征值大于0,则前l阶特征向量组成一组新的正交基. 若l=n,则
为了进一步验证PCA法的有效性,将由m阶贡献模态
5. 数值算例
5.1. 模型参数
如图1(a)所示为某200 m跨轴对称环形张力罩棚结构. 该结构共有120个节点(外围24个节点固定于周边刚性环梁上)和192根构件. 定义不考虑预应力、自重及外荷载作用时的状态为结构的零状态,其自平衡构型如图1(b)所示([]内数字为构件组号). 如图1(c)和(d)所示分别为上、下弦节点的编号. 假设索、杆的质量密度均为7 850 kg/m3,而弹性模量分别为1.7×1011和2.06×1011 N/m2. 根据结构的对称性和构件所在位置设定构件类型,并将所有构件划分为8组. 构件组号与构件位置的对应关系如图1(b)所示. 构件组号与构件类型、构件编号的对应关系如表1所示. 表1同时给出了截面面积Ak、平衡态下的构件轴力tk以及构件长度误差euk等结构参数. 其中,k为构件编号.
图 1
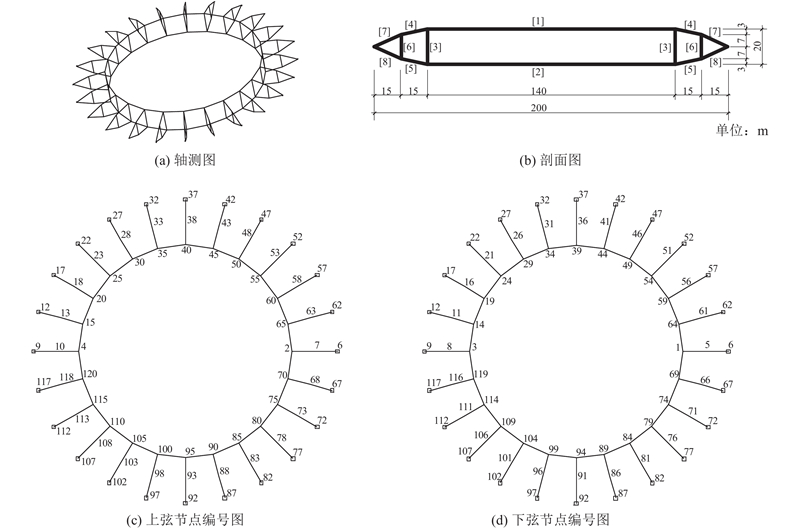
图 1 某200 m跨轴对称环形张力罩棚结构示意图
Fig.1 Diagram of axisymmetric annular tensile canopy structure with span of 200 m
表 1 环形张力罩棚结构的构件分组与结构参数
Tab.1
| 构件组号 | 构件类型 | k | Ak / mm2 | tk / kN | euk / mm |
| 1 | 上环索 | 1~24 | 42 500 | 20 000 | ±15 |
| 2 | 下环索 | 25~48 | 42 500 | 20 000 | ±15 |
| 3 | 内侧压杆 | 49~72 | 6 225 | -1 044.2 | ±10 |
| 4 | 上部内侧径向索 | 73~96 | 10 525 | 5 324.5 | ±15 |
| 5 | 下部内侧径向索 | 97~120 | 10 525 | 5 324.5 | ±15 |
| 6 | 外侧压杆 | 121~144 | 7 165 | −1 392.3 | ±10 |
| 7 | 上部外侧径向索 | 145~168 | 11 625 | 5 761.5 | ±15 |
| 8 | 下部外侧径向索 | 169~192 | 11 625 | 5 761.5 | ±15 |
为使算例参数尽可能贴近工程实际,表1给出的构件轴力和截面面积应当满足结构设计的强度条件和刚度条件. 在施加预应力后,结构由零状态变为平衡态,此时拉索应力取值在450~500 MPa,为常用拉索设计强度的30%左右;压杆(假设可以保证整体稳定性)应力在165~195 MPa,介于Q345钢设计强度的50%~60%. 考虑作用于上弦屋面的满跨均布和半跨均布2种设计工况(均为竖向均布荷载0.5 kN/m2). 在2种设计工况作用下(同时考虑结构自重),结构最大位移为232 mm,小于限值240 mm(等于罩棚悬挑长度的1/125).
为简化计算,结构自重仅考虑构件重量. 以在平衡态施加结构自重后得到的平衡构型作为后期加载的基准构型. 该基准构型下的结构可称为理想结构. 在实际的静力测试中,往下弦节点施加铅锤荷载最为方便,因此考虑2种荷载工况:工况1,在所有下弦节点各施加10 kN铅锤荷载(即满跨加载,共48个加载点);工况2,在同一侧下弦节点各施加10 kN铅锤荷载(即半跨加载,共24个加载点).
5.2. 静力位移贡献模态的选取与验证
将相同荷载作用下理想结构和实际结构的贡献模态进行对比,以验证用少数贡献模态线性表达静力位移的准确性. 具体步骤如下:1)对理想结构进行模态分析得到各阶理想模态;2)生成包含随机结构参数偏差的实际结构;3)计算理想结构和实际结构的静力位移,并比较各阶理想模态的贡献变化.
根据国家相关规范[24-26]的规定,假设构件长度误差限值euk如表1所示,支座的竖向位置偏差限值
根据文献[19]分别计算工况1、2荷载作用下各阶理想模态对理想结构和实际结构的广义位移
表 2 对静力位移贡献最大的前5阶理想模态及其组合系数(工况1)
Tab.2
| 理想结构 | 实际结构 | |||||
| j | |αj| | γ j | j | |αj| | γ j | |
| 9 | 2.223 3 | 1.000 0 | 9 | 2.346 4 | 1.000 0 | |
| 98 | 0.862 2 | 0.387 8 | 98 | 0.908 6 | 0.387 2 | |
| 148 | 0.030 6 | 0.013 8 | 148 | 0.032 2 | 0.013 7 | |
| 153 | 0.021 3 | 0.009 6 | 153 | 0.022 5 | 0.009 6 | |
| 134 | 0.009 5 | 0.004 3 | 134 | 0.011 6 | 0.004 9 | |
表 3 对静力位移贡献最大的前18阶理想模态及其组合系数(工况2)
Tab.3
| 理想结构 | 实际结构 | |||||
| j | |αj| | γ j | j | |αj| | γ j | |
| 2 | 9.583 5 | 1.000 0 | 2 | 9.945 1 | 1.000 0 | |
| 9 | 1.111 7 | 0.116 0 | 9 | 1.162 1 | 0.116 8 | |
| 3 | 1.083 3 | 0.113 0 | 3 | 1.122 2 | 0.112 8 | |
| 7 | 0.878 2 | 0.091 6 | 7 | 0.911 9 | 0.091 7 | |
| 98 | 0.431 1 | 0.045 0 | 98 | 0.453 8 | 0.045 6 | |
| 42 | 0.418 3 | 0.043 6 | 42 | 0.432 5 | 0.043 5 | |
| 8 | 0.405 7 | 0.042 3 | 8 | 0.422 1 | 0.042 4 | |
| 15 | 0.334 5 | 0.034 9 | 15 | 0.349 6 | 0.035 2 | |
| 13 | 0.254 8 | 0.026 6 | 13 | 0.262 4 | 0.026 4 | |
| 43 | 0.198 4 | 0.020 7 | 43 | 0.205 6 | 0.020 7 | |
| 12 | 0.195 5 | 0.020 4 | 12 | 0.203 2 | 0.020 4 | |
| 49 | 0.156 7 | 0.016 3 | 49 | 0.162 5 | 0.016 3 | |
| 39 | 0.130 9 | 0.013 7 | 39 | 0.134 9 | 0.013 6 | |
| 40 | 0.124 2 | 0.013 0 | 40 | 0.128 9 | 0.013 0 | |
| 50 | 0.124 0 | 0.012 9 | 50 | 0.128 4 | 0.012 9 | |
| 56 | 0.115 0 | 0.012 0 | 56 | 0.118 7 | 0.011 9 | |
| 48 | 0.096 6 | 0.010 1 | 48 | 0.100 0 | 0.010 1 | |
| 102 | 0.064 9 | 0.006 8 | 102 | 0.066 8 | 0.006 7 | |
为了进一步考察所选取贡献模态适应结构参数变化的能力,采用蒙特卡洛法进行统计分析,同时考虑构件长度误差、支座位置偏差和构件损伤这3种随机参数. 对于构件长度误差和支座位置偏差,假设其限值与分布模式和前述一致. 对于构件损伤,记其限值为
表 4 贡献模态变化概率与构件损伤限值的关系
Tab.4
| δu / % | 工况1 | 工况2 | |||
| Pf1 / % | Ps2 / % | Pf2 / % | Ps2 / % | ||
| 0 | 100 | 0 | 100 | 0 | |
| 10 | 100 | 0 | 100 | 0 | |
| 20 | 91.6 | 8.4 | 100 | 0 | |
| 30 | 57.6 | 42.4 | 100 | 0 | |
| 40 | 44.4 | 55.6 | 100 | 0 | |
| 50 | 39.2 | 60.8 | 100 | 0 | |
5.3. 结构模态的主成分分析
由于各阶模态仅关于质量矩阵正交,考虑到质量矩阵一般情况下都不是单位矩阵,各阶模态之间可能存在相关性. 将模态(振型)分别代替式(10)中的位移,计算出任意2阶模态之间的MAC值,以衡量其线性相关程度. 以工况1中的3阶贡献模态和工况2中的17阶贡献模态为例,计算贡献模态之间的MAC值并绘制三维柱状图,分别如图2(a)和(b)所示. 由图2可知,少数模态之间的MAC值并不为0,如图2(a)中的MAC2,3=0.151(下标2、3分别对应第98、148号模态)和图2(b)中的MAC7,17=0.165(下标7、17分别对应第13、98号模态). 可见,各阶模态并不严格满足正交性要求. 从表面上看,直接以理想模态作为自由度空间的基向量并不合理.
图 2
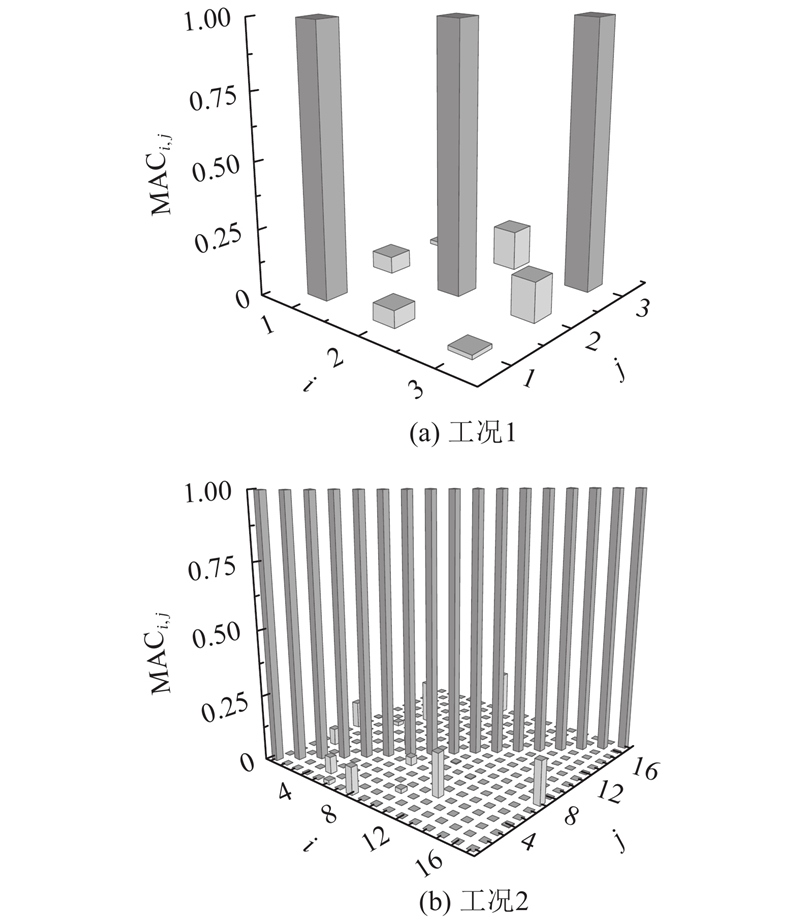
图 2 2种不同工况相应贡献模态之间的模态保证准则(MAC)值
Fig.2 Modal assurance criterion (MAC) values between contribution modes for two different load cases
采用PCA法来考察采用理想模态线性表达静力位移的合理性. 按式(12)对所有理想模态组成的振型矩阵X进行SVD分解,并将特征值对最大值归一化,且由大到小排序,可得第288阶特征值为0.247(总自由度数n =288). 可见,尽管各阶理想模态之间并非严格正交,由于其包含着n个n×1维严格正交基向量的信息,静力位移可以等效表达成n个严格正交基向量的线性组合. 可见,采用理想模态代替严格正交基向量来线性表达静力位移是合理的.
进一步对贡献模态进行主成分分析. 按式(12)对工况1中由3阶贡献模态组成的振型矩阵X1进行主成分分析. 将归一化特征值进行排序,前4阶特征值分别为1、0.298、0.245和0. 可见,经主成分分析后,工况1的3阶贡献模态可以转换成3阶主成分正交基. 同样对工况2中由17阶贡献模态组成的振型矩阵X2进行主成分分析. 将归一化特征值进行排序,第17阶特征值为0.139,而第18阶特征值为0. 可见,经主成分分析后,工况2的17阶贡献模态同样可以转换成17阶主成分正交基. 工况1和工况2的贡献模态数量都分别等于相应主成分正交基(为严格正交基)的数量. 值得注意的是,若将主成分正交基代替贡献模态进行后续测点位置优化和静力位移扩展,其计算结果与采用贡献模态时完全一致(第5.4和5.5节不再重复给出相关数据). 这种贡献模态与主成分正交基的等效性再次证明将理想模态作为“基向量”是有效的.
5.4. 测点位置的优化结果
基于贡献模态集合Ep1和Ep2,采用第3章所述的迭代策略分别对工况1、2的测点位置进行优化. 一般情况下,测点数量取为贡献模态数量加1即可(满足测点数量不小于贡献模态数量的要求). 相应地,工况1需要4个测点,最优位置为{1x,1z,38z,39y};ix、iy、iz分别表示节点i的x、y、z方向. 工况2需要18个测点,最优位置为{5y,10z,18z,24z,28z,38z,48z,54z,58z,68z,74z,78z,88z,94z,98z,108z,118z,119z}.
由于文献[16]方法的测点需要与加载点相同,工况1、2分别需要48、24个测点,其位置与相应的加载点相同. 为了考察测点数量对所提方法静力位移扩展结果的影响,对工况1、2均增加测点数量至24. 此时2种工况的最优测点位置分别为{1x,1z,2x,3x,3z,4x,7z,10z,23z,34z,38z,39y,39z,40z,53z,64z,69z,78z,93z,94y,94z,95z,108z,119z}和{1z,5y,7z,10z,18z,24z,28z,38z,44z,48z,54z,58z,63z,68z,74z,78z,84z,88z,94z,98z,104z,108z,118z,119z}.
5.5. 静力位移扩展结果
为了考虑测量误差的影响,假设实测位移的噪声添加方式为
式中:
表 5 某实际结构静力位移扩展结果(工况1)
Tab.5
| ε / % | 所提方法(4个测点) | 所提方法(24个测点) | 文献[16]方法(48个测点) | |||||
| MACmin | MVEmax / mm | MACmin | MVEmax / mm | MACmin | MVEmax / mm | |||
| 0 | 0.999 8 | 0.001 7 | 0.999 8 | 0.001 6 | 1.000 0 | 0.000 5 | ||
| 1 | 0.999 4 | 0.003 3 | 0.999 7 | 0.001 8 | 0.999 8 | 0.001 6 | ||
| 2 | 0.998 4 | 0.004 8 | 0.999 4 | 0.002 6 | 0.999 2 | 0.002 9 | ||
| 3 | 0.996 1 | 0.007 3 | 0.999 1 | 0.003 3 | 0.998 0 | 0.004 6 | ||
| 4 | 0.995 4 | 0.009 3 | 0.998 4 | 0.004 5 | 0.997 2 | 0.005 8 | ||
| 5 | 0.992 8 | 0.012 7 | 0.997 8 | 0.005 5 | 0.994 2 | 0.007 8 | ||
| 6 | 0.991 2 | 0.014 2 | 0.994 5 | 0.006 5 | 0.992 0 | 0.008 6 | ||
| 7 | 0.987 9 | 0.015 6 | 0.993 9 | 0.007 3 | 0.990 9 | 0.009 8 | ||
| 8 | 0.981 7 | 0.017 3 | 0.992 8 | 0.008 7 | 0.987 4 | 0.011 2 | ||
表 6 某实际结构静力位移扩展结果(工况2)
Tab.6
| ε / % | 所提方法(18个测点) | 所提方法(24个测点) | 文献[16]方法(24个测点) | |||||
| MACmin | MVEmax / mm | MACmin | MVEmax / mm | MACmin | MVEmax / mm | |||
| 0 | 0.999 5 | 0.010 5 | 0.999 6 | 0.010 5 | 1.000 0 | 0.001 5 | ||
| 1 | 0.998 9 | 0.016 9 | 0.999 4 | 0.014 3 | 0.999 9 | 0.005 6 | ||
| 2 | 0.997 4 | 0.024 8 | 0.998 0 | 0.018 8 | 0.999 4 | 0.011 3 | ||
| 3 | 0.995 8 | 0.030 5 | 0.997 3 | 0.024 4 | 0.999 0 | 0.017 5 | ||
| 4 | 0.992 4 | 0.041 8 | 0.996 1 | 0.031 6 | 0.997 9 | 0.021 5 | ||
| 5 | 0.990 3 | 0.044 4 | 0.995 8 | 0.034 2 | 0.997 1 | 0.025 6 | ||
| 6 | 0.985 4 | 0.058 2 | 0.992 3 | 0.044 1 | 0.994 5 | 0.032 5 | ||
| 7 | 0.980 3 | 0.068 3 | 0.991 2 | 0.047 6 | 0.992 6 | 0.037 8 | ||
| 8 | 0.977 8 | 0.072 1 | 0.986 7 | 0.053 5 | 0.990 5 | 0.042 7 | ||
总体而言,所提方法的扩展效果较好. 工况1中,在测点比加载点少50%的情况下,所提方法也能获得和文献[16]方法相当的扩展效果,表明该方法对某些荷载工况(贡献模态数远小于加载点数)是非常有效的,且能大幅减少测点数量. 在实际应用中,可以主动选择贡献模态数量较少的荷载工况进行加载,有利于提升静力测试的效率.
6. 结 语
本研究以环形张力罩棚结构为例,提出了一种新的静力位移扩展方法来快速测量索杆张力结构的静力位移场,为此类结构的静力测试提供了一种新的选择,主要结论如下.
1)存在随机结构参数偏差的实际结构静力位移可以近似表示为少数理想模态(即贡献模态)的线性组合. 算例结果表明,不同荷载工况所需要的贡献模态数量可能差别较大,但贡献模态均能适应结构参数的较大变化并保持良好的稳定性.
2)所提迭代策略可以优化测点位置,同时实现贡献模态组合系数的无偏估计,从而保证静力位移的扩展精度. 算例结果表明,荷载工况和测点数量均对扩展效果有较大影响.
3)主成分分析结果表明,结构模态包含着自由度空间完整的严格正交基向量信息. 尽管各阶模态之间存在一定相关性,采用结构模态代替严格正交基来线性表达静力位移是有效的.
参考文献
Group-theoretical form-finding of cable-strut structures based on irreducible representations for rigid-body translations
[J].DOI:10.1016/j.ijmecsci.2018.05.057 [本文引用: 1]
考虑预应力作用的索杆张力结构冗余度分析
[J].
Redundancy investigation of pre-tensioning cable-strut systems considering the effect of pre-stress
[J].
天津理工大学体育馆新型复合式索穹顶结构风振效应分析
[J].
Time-history analysis of wind vibration response for the cable dome of gymnasium at Tianjin University of Technology
[J].
Numerical analysis of the pretension deviations of a novel crescent-shaped tensile canopy structural system
[J].DOI:10.1016/j.engstruct.2016.04.005 [本文引用: 1]
梁结构疲劳刚度退化对模态频率的影响
[J].
Influence of fatigue stiffness degradation for beam structure on modal frequency
[J].
Fast Bayesian frequency domain modal identification from seismic response data
[J].DOI:10.1016/j.compstruc.2018.08.018 [本文引用: 1]
基于优化阶跃激励的索穹顶密集模态测试方法
[J].
Method for identifying modal parameters of closely spaced modes of cable domes by optimizing step excitations
[J].
Experimental identification of closely spaced modes using NExT-ERA
[J].
An efficient indicator for structural damage localization using the change of strain energy based on static noisy data
[J].DOI:10.1016/j.apm.2013.10.072 [本文引用: 1]
一种基于静力位移测量值的车辐式屋盖结构索力识别方法
[J].
A cable force estimation method for spoke structural roof based on static displacement measurement
[J].
车辐式屋盖结构的一种索力识别方法的误差研究
[J].
Reasearch on error of a cable force estimation method for spoke structural roofs
[J].
Modal curvature-based damage localization in weakly damaged continuous beams
[J].DOI:10.1016/j.ymssp.2018.11.012 [本文引用: 1]
A sensitivity-based one-parameter-at-a-time model updating method
[J].DOI:10.1016/j.ymssp.2018.12.025 [本文引用: 1]
Mode shape expansions for the dynamic testing of cable domes considering random pretension deviations
[J].
Reduction of stiffness and mass matrices
[J].
基于静力挠度的梁结构损伤识别两阶段方法
[J].
A two-stage method for beam damage identification based on static deflection
[J].
环形张力索桁罩棚结构施工过程的形态分析
[J].
Shape analysis of annular tensile cable-truss canopy structures
[J].
索杆张力结构静力位移的近似模态表达与间接测量
[J].
Dynamic-mode based approximate expression and indirect measurement of static deflection of cable-strut tensile structures
[J].
Methodology for optimum sensor locations for parameter identification in dynamic systems
[J].DOI:10.1061/(ASCE)0733-9399(1994)120:2(368) [本文引用: 2]
Rates of change of eigenvalues and eigenvectors
[J].
Principal component analysis in an asymmetric norm
[J].DOI:10.1016/j.jmva.2018.10.004 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}