[1]
闻新, 张兴旺, 秦钰琦, 等 国外航天器在轨故障模式统计与分析
[J]. 质量与可靠性 , 2014 , (6 ): 13 - 18
[本文引用: 1]
WEN Xin, ZHANG Xing-wang, QIN Yu-qi, et al Statistics and analysis of on-orbit failure modes of foreign spacecraft
[J]. Quality and Reliability , 2014 , (6 ): 13 - 18
[本文引用: 1]
[2]
谭春林, 胡太彬, 王大鹏, 等 国外航天器在轨故障统计与分析
[J]. 航天器工程 , 2011 , 20 (4 ): 130 - 136
DOI:10.3969/j.issn.1673-8748.2011.04.029
[本文引用: 1]
TAN Chun-lin, HU Tai-bin, WANG Da-peng, et al Analysis on foreign spacecraft in-orbit failures
[J]. Spacecraft Engineering , 2011 , 20 (4 ): 130 - 136
DOI:10.3969/j.issn.1673-8748.2011.04.029
[本文引用: 1]
[3]
闻竞竞, 黄道. 故障诊断方法综述[C]// 计算机技术与应用进展. 合肥: 中国科学技术大学出版社, 2007.
[本文引用: 1]
WEN Jing-jing, HUANG Dao. Review on fault diagnosis [C]//Advances in Computer Technology and Applications . Hefei: Press of University of Science and Technology of China, 2007.
[本文引用: 1]
[5]
苏林, 尚朝轩, 刘文静 航天器姿态控制系统故障诊断方法概述
[J]. 长春理工大学学报: 自然科学版 , 2010 , 33 (4 ): 23 - 27
[本文引用: 1]
SU Lin, SHANG Chao-xuan, LIU Wen-jing Survey on the technology of fault diagnosis for spacecraft attitude control system
[J]. Journal of Changchun University of Science and Technology: Natural Science Edition , 2010 , 33 (4 ): 23 - 27
[本文引用: 1]
[6]
PIRMORADI F N, SASSANI F, SILVA C W D Fault detection and diagnosis in a spacecraft attitude determination system
[J]. Acta Astronautica , 2009 , 65 (5 ): 710 - 729
[本文引用: 1]
[7]
LE H X, MATUNAGA S A residual based adaptive unscented Kalman filter for fault recovery in attitude determination system of microsatellites
[J]. Acta Astronautica , 2014 , 105 (1 ): 30 - 39
DOI:10.1016/j.actaastro.2014.08.020
[本文引用: 2]
[8]
TUDOROIU N, SOBHANI-TEHRANI E, KHORASANI K. Interactive bank of unscented Kalman filters for fault detection and isolation in reaction wheel actuators of satellite attitude control system [C]// Conference of the IEEE Industrial Electronics Society . Taipei: IEEE, 2007: 264-269.
[本文引用: 1]
[9]
贾庆贤, 张迎春, 陈雪芹, 等 卫星姿态控制系统故障重构观测器设计
[J]. 宇航学报 , 2016 , 37 (4 ): 442 - 450
DOI:10.3873/j.issn.1000-1328.2016.04.010
[本文引用: 1]
JIA Qing-xian, ZHANG Ying-chun, CHEN Xue-qin, et al Observer design for fault reconstruction in satellite attitude control system
[J]. Journal of Astronautics , 2016 , 37 (4 ): 442 - 450
DOI:10.3873/j.issn.1000-1328.2016.04.010
[本文引用: 1]
[10]
吴丽娜, 张迎春 离散小波变换在卫星姿态控制系统故障中的应用
[J]. 仪器仪表学报 , 2006 , 27 (6 ): 407 - 409
[本文引用: 1]
WU Li-na, ZHANG Ying-chun Application of dispersing wavelet transform to fault diagnosis of the attitude control subsystem of the satellite
[J]. Chinese Journal of Scientific Instrument , 2006 , 27 (6 ): 407 - 409
[本文引用: 1]
[12]
GUEDDI I, NASRI O, BENOTHMAN K, et al Fault detection and isolation of spacecraft thrusters using an extended principal component analysis to interval data
[J]. International Journal of Control Automation and Systems , 2017 , 15 (2 ): 1 - 14
[本文引用: 1]
[13]
GUEDDI I, NASRI O, BENOTHMAN K, et al. VPCA-based fault diagnosis of spacecraft reaction wheels [C]// 2015 XXV International Conference on Information, Communication and Automation Technologies (ICAT) . Kyoto: IEEE, 2015.
[本文引用: 1]
[15]
王展. 基于小波与BP神经网络的卫星速率积分陀螺故障诊断与隔离[D]. 武汉: 华中科技大学, 2008.
[本文引用: 1]
WANG Zhan. Fault diagnosis and isolation of satellite rate integral gyro based on wavelet and BP neural network [D]. Wuhan: Huazhong University of Science and Technology, 2008.
[本文引用: 1]
[16]
苏振华, 陆文高, 齐晶, 等 基于BP神经网络的卫星故障诊断方法
[J]. 计算机测量与控制 , 2016 , 24 (5 ): 63 - 66
SU Zhen-hua, LU Wen-gao, QI Jing, et al A method of satellite fault diagnosis based on BP neural network
[J]. Computer Measurement and Control , 2016 , 24 (5 ): 63 - 66
[17]
BALDI P, BLANKE M, CASTALDI P, et al Combined geometric and neural network approach to generic fault diagnosis in satellite reaction wheels
[J]. IFAC Papers Online , 2015 , 48 (21 ): 194 - 199
DOI:10.1016/j.ifacol.2015.09.527
[本文引用: 1]
[18]
程瑶. 卫星姿态控制系统的混合故障诊断方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
[本文引用: 1]
CHENG Yao. The combined approach for fault diagnosis of satellite attitude control system [D]. Harbin: Harbin Institute of Technology, 2016.
[本文引用: 1]
[19]
LIU G, ZHANG K, JIANG B. Adaptive observer-based fast fault estimation of a leader-follower linear multi-agent system with actuator faults [C]// Control Conference . Sabah: IEEE, 2015.
[本文引用: 1]
[21]
FARAGHER R Understanding the basis of the Kalman filter via a simple and intuitive derivation
[J]. IEEE Signal Processing Magazine , 2012 , 29 (5 ): 128 - 132
DOI:10.1109/MSP.2012.2203621
[本文引用: 2]
[22]
张德丰. MATLAB小波分析[M]. 2版. 北京: 机械工业出版社, 2012: 384.
[本文引用: 1]
[23]
孙延奎. 小波分析及其应用[M]. 北京: 机械工业出版社, 2005: 219.
[本文引用: 1]
[24]
URSZULA L, ZYGMUNT H. Wavelet based rule for fault detection [C]// 10th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes Safe Process . Warsaw: IFAC, 2018.
[本文引用: 1]
[25]
HAJIYEV C, CILDEN D, SOMOV Y Gyro-free attitude and rate estimation for a small satellite using SVD and EKF
[J]. Aerospace Science and Technology , 2016 , 55 (8 ): 324 - 331
[本文引用: 1]
[26]
HAJIYEV C, CILDEN G D Review on gyroless attitude determination methods for small satellites
[J]. Progress in Aerospace Sciences , 2017 , 90 (4 ): 54 - 66
[本文引用: 1]
[27]
吕振铎, 雷拥军. 卫星姿态测量与确定[M]. 北京: 国防工业出版社, 2013: 214-217.
[本文引用: 1]
国外航天器在轨故障模式统计与分析
1
2014
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
国外航天器在轨故障模式统计与分析
1
2014
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
国外航天器在轨故障统计与分析
1
2011
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
国外航天器在轨故障统计与分析
1
2011
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
1
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
1
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
航天器姿态控制系统故障诊断方法概述
1
2010
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
航天器姿态控制系统故障诊断方法概述
1
2010
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
Fault detection and diagnosis in a spacecraft attitude determination system
1
2009
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
A residual based adaptive unscented Kalman filter for fault recovery in attitude determination system of microsatellites
2
2014
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
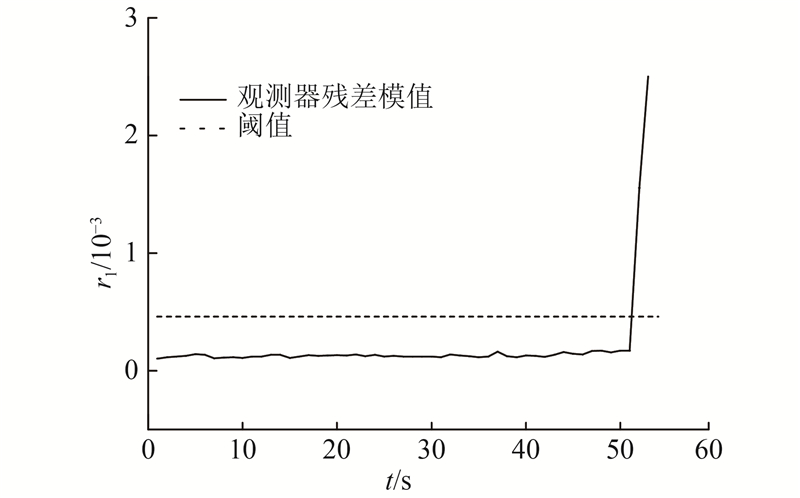
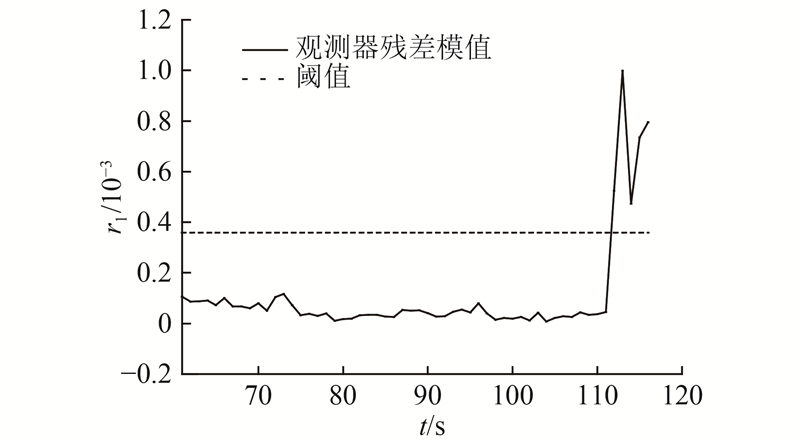
... 器件层检测主要实现故障定位. 卫星卡尔曼定姿算法可以参见文献[7 ],本文不再赘述. 根据文献[21 ]可知,卡尔曼滤波在收敛后新息有界,一旦器件出现故障,会使得算法中的参数不匹配,新息超出阈值,对相关敏感器进行小波分析,可以定位故障源. ...
1
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
卫星姿态控制系统故障重构观测器设计
1
2016
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
卫星姿态控制系统故障重构观测器设计
1
2016
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
离散小波变换在卫星姿态控制系统故障中的应用
1
2006
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
离散小波变换在卫星姿态控制系统故障中的应用
1
2006
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
经验模态分解方法在航天器故障诊断中的应用
1
2010
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
经验模态分解方法在航天器故障诊断中的应用
1
2010
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
Fault detection and isolation of spacecraft thrusters using an extended principal component analysis to interval data
1
2017
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
1
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
分布式模糊专家系统设计及在卫星诊断中的应用
1
2005
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
分布式模糊专家系统设计及在卫星诊断中的应用
1
2005
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
1
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
1
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
Combined geometric and neural network approach to generic fault diagnosis in satellite reaction wheels
1
2015
... 在国外已公开的航天器在轨故障中,姿控分系统与电源分系统的故障比例最高[1 -2 ] . 姿控分系统包含较多敏感器和执行机构,内部集成多种算法,一旦出现故障,不仅影响卫星的姿态测量与控制,更可能使得整星失效,导致航天任务失败. 目前针对航天器姿控系统的故障检测技术主要可以划分为以下3类[3 -5 ] . 1)基于解析模型的方法,运用软件冗余代替硬件冗余得到残差,对残差进行处理,从而实现检测. 如Pirmoradi等[6 -7 ] 利用卫星运动学与动力学模型,设计多组卡尔曼滤波滤波算法,通过对新息进行假设检验,实现单故障检测定位;Tudoroiu 等[8 ] 提出交互式多模型无极卡尔曼滤波算法,可以实现对执行机构的故障检测;贾庆贤等[9 ] 设计PD型学习观测器,估计卫星姿态,实现了单器件故障的检测与重构. 2)基于信号处理的检测方法,直接分析测量信号,提取频谱、幅值、方差等特征,实现故障检测,无需数学模型,适应性强. 如吴丽娜等[10 ] 利用离散小波变换对卫星姿控系统进行故障诊断,实现了陀螺突变故障的检测;陈婷艳等[11 ] 通过经验模态分解法(EMD)提取故障特征,实现航天器运动器件的故障检测;Gueddi等[12 -13 ] 利用顶点主成分分析(VPCA),实现了执行器的故障检测与隔离. 3)基于人工智能的检测方法,无需精确模型,现阶段研究最多,也是今后自主检测发展的方向. 如樊久铭等[14 ] 基于模糊集理论,设计分布式模糊专家系统,初步验证了其在电源故障检测中的可行性;王展等[15 -17 ] 分别利用神经网络,实现了器件故障类型的分类以及飞轮的故障检测. 综上所述,现有研究针对姿控系统的检测难以适应多器件故障的情况,偏向于单器件单故障类型的检测,适应的故障类型较少;人工智能的方法和部分阈值判断方法多数需要大量的历史数据以及专家经验,计算量巨大,不适用于皮纳卫星的在线实时诊断,难以满足皮纳卫星自主可靠运行的需求. ...
1
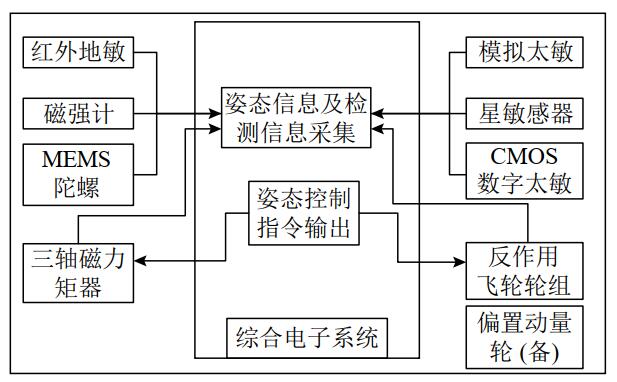
... ADCS故障主要可以分为敏感器故障、执行器故障以及算法异常. 根据故障时变特性,敏感器故障可以分为间歇性突变故障、偏差故障、缓变故障、输出卡死故障[18 ] . 间歇性突变是由于环境突变或器件本身接触不良的原因导致器件出现瞬时突变,对系统的影响较小;偏差故障一般是由于元器件失效,导致信号出现一定偏差,通常表现为阶跃变化;缓变故障是由于器件老化导致性能退化或因噪声引起信号漂移等缓慢变化的故障;输出卡死故障则表现为输出信号某一时刻起保持常值. 敏感器故障会直接导致输出信号异常,使得接入该敏感器的定姿算法出错,导致控制力矩计算错误,在不进行故障隔离的情况下,故障影响将逐级扩大,极有可能使得卫星失控. ...
1
... ADCS故障主要可以分为敏感器故障、执行器故障以及算法异常. 根据故障时变特性,敏感器故障可以分为间歇性突变故障、偏差故障、缓变故障、输出卡死故障[18 ] . 间歇性突变是由于环境突变或器件本身接触不良的原因导致器件出现瞬时突变,对系统的影响较小;偏差故障一般是由于元器件失效,导致信号出现一定偏差,通常表现为阶跃变化;缓变故障是由于器件老化导致性能退化或因噪声引起信号漂移等缓慢变化的故障;输出卡死故障则表现为输出信号某一时刻起保持常值. 敏感器故障会直接导致输出信号异常,使得接入该敏感器的定姿算法出错,导致控制力矩计算错误,在不进行故障隔离的情况下,故障影响将逐级扩大,极有可能使得卫星失控. ...
1
... 引理1[19 ] 给定常数μ >0和对称正定矩阵Q
基于Lyapunov方法的非线性系统自适应观测器设计
1
2006
... 引理2[20 ] 给定对称正定矩阵P
基于Lyapunov方法的非线性系统自适应观测器设计
1
2006
... 引理2[20 ] 给定对称正定矩阵P
Understanding the basis of the Kalman filter via a simple and intuitive derivation
2
2012
... 器件层检测主要实现故障定位. 卫星卡尔曼定姿算法可以参见文献[7 ],本文不再赘述. 根据文献[21 ]可知,卡尔曼滤波在收敛后新息有界,一旦器件出现故障,会使得算法中的参数不匹配,新息超出阈值,对相关敏感器进行小波分析,可以定位故障源. ...
... 卫星动力学方程包含角速度信息,通过结合部分矢量敏感器信息,可以实现卫星的无陀螺定姿[25 -26 ] . 本文基于动力学方程设计EKF算法,以陀螺采样值作为量测,得到角速度的最优估计,整个滤波过程即为数字动力学陀螺. 由文献[21 ]可知,在无故障且算法收敛时,新息有界. 在执行机构故障后,状态递推方程与状态均方误差阵不再匹配,将导致算法发散,新息超出阈值. ...
1
... 小波多分辨分析的基本思想是将主体空间用相互正交的尺度空间与小波空间表示. 尺度空间是对信号作概貌近似,表示信号的发展趋势,反映信号的低频部分;小波空间对信号作细节近似,反映信号的高频部分,涵盖信号的故障信息[22 -23 ] . ...
1
... 小波多分辨分析的基本思想是将主体空间用相互正交的尺度空间与小波空间表示. 尺度空间是对信号作概貌近似,表示信号的发展趋势,反映信号的低频部分;小波空间对信号作细节近似,反映信号的高频部分,涵盖信号的故障信息[22 -23 ] . ...
1
... 令 ${{{\chi}} _{{j}}}$ j 层高频小波系数重构信号,在正常采样信号中,各时间窗内 ${{{\chi}} _{{j}}}$ 24 ]可知,当原始信号可以看作由真值和零均值高斯噪声构成时,高频重构信号 ${{{\chi}} _{{j}}}$
Gyro-free attitude and rate estimation for a small satellite using SVD and EKF
1
2016
... 卫星动力学方程包含角速度信息,通过结合部分矢量敏感器信息,可以实现卫星的无陀螺定姿[25 -26 ] . 本文基于动力学方程设计EKF算法,以陀螺采样值作为量测,得到角速度的最优估计,整个滤波过程即为数字动力学陀螺. 由文献[21 ]可知,在无故障且算法收敛时,新息有界. 在执行机构故障后,状态递推方程与状态均方误差阵不再匹配,将导致算法发散,新息超出阈值. ...
Review on gyroless attitude determination methods for small satellites
1
2017
... 卫星动力学方程包含角速度信息,通过结合部分矢量敏感器信息,可以实现卫星的无陀螺定姿[25 -26 ] . 本文基于动力学方程设计EKF算法,以陀螺采样值作为量测,得到角速度的最优估计,整个滤波过程即为数字动力学陀螺. 由文献[21 ]可知,在无故障且算法收敛时,新息有界. 在执行机构故障后,状态递推方程与状态均方误差阵不再匹配,将导致算法发散,新息超出阈值. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}