[2]
YANG C C, HSU Y L A review of accelerometry-base-dwearable motion detectors for physical activity mon-itoring
[J]. Sensors , 2010 , 10 (8 ): 7772 - 7788
DOI:10.3390/s100807772
[本文引用: 1]
[3]
AMIN M G, ZHANG Y D, AHMAD F, et al Radar signal processing for elderly fall detection: the future for in-home monitoring
[J]. IEEE Signal Processing Magazine , 2016 , 33 (2 ): 71 - 80
DOI:10.1109/MSP.2015.2502784
[本文引用: 1]
[4]
AMIN M G. Radar for indoor monitoring: detection, classification, and assessment [M]. Boca Raton: CRC Press, 2017.
[本文引用: 1]
[5]
CHEN V C, LI F, HO S S, et al Micro-Doppler effect in radar: phenomenon, model, and simulation study
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2006 , 42 (1 ): 2 - 21
[本文引用: 1]
[6]
PARASHAR K N, OVENEKE M C, RYKUNOV M, et al. Micro-Doppler feature extraction using convolutional auto-encoders for low latency target classification [C]// 2017 IEEE Radar Conference . Seattle: IEEE, 2017: 1739-1744.
[本文引用: 1]
[7]
KIM Y, LING H Human activity classification based on micro-Doppler signatures using a support vector machine
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2009 , 47 (5 ): 1328 - 1337
DOI:10.1109/TGRS.2009.2012849
[本文引用: 1]
[8]
JOKANOVIC B, AMIN M Fall detection using deep learning in range-Doppler radars
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2017 , 54 (1 ): 180 - 189
[9]
SSYFIOGLU M S, OZBAYOGLU A M, GURBUZ S Z Deep convolutional autoencoder for radar-based classification of similar aided and unaided human activities
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2018 , 54 (4 ): 1709 - 1723
DOI:10.1109/TAES.2018.2799758
[本文引用: 1]
[10]
MURO A, GARCIA B, MENDEZ A Gait analysis methods: an overview of wearable and non-wearable systems, highlighting clinical applications
[J]. Sensors , 2014 , 14 (2 ): 3362 - 3394
DOI:10.3390/s140203362
[本文引用: 1]
[11]
SAHO K, FUJIMOTO M, MASUGI M, et al Gait classification of young adults, elderly non-fallers, and elderly fallers using micro-doppler radar signals: simulation study
[J]. IEEE Sensors Journal , 2017 , 17 (8 ): 2320 - 2321
DOI:10.1109/JSEN.2017.2678484
[本文引用: 2]
[12]
TIVIVE F H C, BOUZERDOUM A, AMIN M G A humangait classification method based on radar Doppler spectrograms
[J]. EURASIP Journal on Advances in Signal Processing , 2010 , 389716
[本文引用: 1]
[13]
SEIFERT A K, AMIN M, ZOUBIR A M Toward unobtrusive in-home gait analysis based on radar micro-doppler signatures
[J]. IEEE Transactions on Biomedical Engineering , 2019 , 66 (9 ): 2629 - 2640
[本文引用: 2]
[14]
BARREET T W History of ultra wideband commun-ications and radar
[J]. Microwave Journal , 2001 , 44 (2 ): 22 - 46
[本文引用: 2]
[15]
费元春. 超宽带雷达理论与技术[M]. 北京: 国防工业出版社, 2010.
[本文引用: 1]
[16]
张群, 胡健, 罗迎, 等 微动目标雷达特征提取、成像与识别研究进展
[J]. 雷达学报 , 2018 , 7 (5 ): 5 - 21
[本文引用: 1]
ZHANG Qun, HU Jian, LUO Ying, et al Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions
[J]. Journal of Radars , 2018 , 7 (5 ): 5 - 21
[本文引用: 1]
[17]
TSAO J, PORRAT D, TSE D Prediction and modeling for the time-evolving ultra-wide band channel
[J]. IEEE Journal of Selected Topics in Signal Processing , 2007 , 1 (3 ): 340 - 356
DOI:10.1109/JSTSP.2007.906662
[本文引用: 1]
[18]
COHEN L. Time-frequency analysis: theory and applications [M]. Upper Saddle River: Prentice Hall, 1995.
[本文引用: 1]
[19]
ALAHI A, GOEL K, RAMANATHAN V, et al. Social lstm: human trajectory prediction in crowded spaces [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 961-971.
[本文引用: 1]
[20]
VENUGOPALAN S, HENDRICKS L A, MOONEY R, et al. Improving lstm-based video description with linguistic knowledge mined from text [J/OL]. [2016-11-29]. (2019-06-25). https://arxiv.org/abs/1604.01729.
[本文引用: 1]
[21]
DALAL N, TRIGGS B. Histograms of oriented gradients for human detection [C]// International Conference on Computer Vision and Pattern Recognition . San Diego: IEEE Computer Society, 2005: 886-893.
[本文引用: 1]
[22]
SHIN H C, ROTH H R, GAO M, et al Deep conv-olutional neural networks for computeraided detection: CNN architectures, dataset characteristics and transfer learning
[J]. IEEE Transactions on Medical Imaging , 2016 , 35 (5 ): 1285 - 1298
DOI:10.1109/TMI.2016.2528162
[本文引用: 1]
[23]
陈羽中, 方明月, 郭文忠, 等 基于小波变换与差分自回归移动平均模型的微博话题热度预测
[J]. 模式识别与人工智能 , 2015 , 28 (7 ): 586 - 594
[本文引用: 1]
CHEN Yu-zhong, FANG Ming-yue, GUO wen-zhong, et al Topic popularity prediction of microblog based on wavelet transformation and ARIMA
[J]. Pattern Recognition and Artificial Intelligence , 2015 , 28 (7 ): 586 - 594
[本文引用: 1]
[24]
NARASIMHAN V, DANECEK P, SCALLY A, et al BCFtools/RoH: a hidden Markov model approach for detecting autozygosity from next-generation sequencing data
[J]. Bioinformatics , 2016 , 32 (11 ): 1749 - 1751
DOI:10.1093/bioinformatics/btw044
[本文引用: 1]
[25]
CHEN K, ZHOU Y, DAI F. A LSTM-based method for stock returns prediction: a case study of China stock market [C]// 2015 IEEE International Conference on Big Data . Santa Clara: IEEE, 2015: 2823-2824.
[本文引用: 1]
[26]
NGUYEN A, KANOULAS D, MURATORE L, et al. Translating videos to commands for robotic manipulation with deep recurrent neural networks [C]// 2018 IEEE International Conference on Robotics and Automation (ICRA) . Montreal: IEEE, 2018: 1-9.
[本文引用: 1]
[27]
VERMA P K, GAIKWAD A N, SINGH D, et al Analysis of clutter reduction techniques for through wall imaging in UWB range
[J]. Progress in Electromagnetics Research , 2009 , 17 : 29 - 48
DOI:10.2528/PIERB09060903
[本文引用: 1]
Intelligent multi-camera video surveillance: a review
1
2013
... 环境感知是监控系统的核心功能,目前普遍的方案是借助摄像头从周围环境中收集信息[1 ] .摄像头对光照条件有较高的要求,同时容易泄露隐私,因而无法在家庭敏感区域使用. 其他环境感知设备,比如可穿戴设备,虽然鲁棒性较高,但是由于具有侵入性被多数人所排斥,同样存在较大的局限性[2 ] . 随着半导体技术的快速发展,芯片的体积大幅度缩小,雷达开始在民用领域发挥越来越大的作用,特别是在智能照护和安防中,雷达已经成为研究热点[3 -4 ] . 雷达传感器通常安装在周围环境中,依靠微波作为信息载体,因此不存在侵入性和直接的隐私泄漏问题. 此外,它不受天气、光照等因素影响,适合长时间对室内环境进行感知. ...
A review of accelerometry-base-dwearable motion detectors for physical activity mon-itoring
1
2010
... 环境感知是监控系统的核心功能,目前普遍的方案是借助摄像头从周围环境中收集信息[1 ] .摄像头对光照条件有较高的要求,同时容易泄露隐私,因而无法在家庭敏感区域使用. 其他环境感知设备,比如可穿戴设备,虽然鲁棒性较高,但是由于具有侵入性被多数人所排斥,同样存在较大的局限性[2 ] . 随着半导体技术的快速发展,芯片的体积大幅度缩小,雷达开始在民用领域发挥越来越大的作用,特别是在智能照护和安防中,雷达已经成为研究热点[3 -4 ] . 雷达传感器通常安装在周围环境中,依靠微波作为信息载体,因此不存在侵入性和直接的隐私泄漏问题. 此外,它不受天气、光照等因素影响,适合长时间对室内环境进行感知. ...
Radar signal processing for elderly fall detection: the future for in-home monitoring
1
2016
... 环境感知是监控系统的核心功能,目前普遍的方案是借助摄像头从周围环境中收集信息[1 ] .摄像头对光照条件有较高的要求,同时容易泄露隐私,因而无法在家庭敏感区域使用. 其他环境感知设备,比如可穿戴设备,虽然鲁棒性较高,但是由于具有侵入性被多数人所排斥,同样存在较大的局限性[2 ] . 随着半导体技术的快速发展,芯片的体积大幅度缩小,雷达开始在民用领域发挥越来越大的作用,特别是在智能照护和安防中,雷达已经成为研究热点[3 -4 ] . 雷达传感器通常安装在周围环境中,依靠微波作为信息载体,因此不存在侵入性和直接的隐私泄漏问题. 此外,它不受天气、光照等因素影响,适合长时间对室内环境进行感知. ...
1
... 环境感知是监控系统的核心功能,目前普遍的方案是借助摄像头从周围环境中收集信息[1 ] .摄像头对光照条件有较高的要求,同时容易泄露隐私,因而无法在家庭敏感区域使用. 其他环境感知设备,比如可穿戴设备,虽然鲁棒性较高,但是由于具有侵入性被多数人所排斥,同样存在较大的局限性[2 ] . 随着半导体技术的快速发展,芯片的体积大幅度缩小,雷达开始在民用领域发挥越来越大的作用,特别是在智能照护和安防中,雷达已经成为研究热点[3 -4 ] . 雷达传感器通常安装在周围环境中,依靠微波作为信息载体,因此不存在侵入性和直接的隐私泄漏问题. 此外,它不受天气、光照等因素影响,适合长时间对室内环境进行感知. ...
Micro-Doppler effect in radar: phenomenon, model, and simulation study
1
2006
... 经过长期发展,目前雷达的作用不再局限于单纯的测距、测角等,还可以对运动中的目标属性进行相应的表征. 具体来说,所监测的目标在运动时会对雷达信号的频率和相位进行调制,从而在回波信号的主频率周围产生额外的频率分量,这就是Chen等[5 ] 提出的微多普勒特征. 可将微多普勒特征视为目标身体各个部分与整个主体之间在运动时表现出来的差异,理论上包含目标的形状、结构和动作速度等特性. 在实际应用中,微多普勒特征在目标识别(行人、自行车和汽车)[6 ] 和动作分类[7 -9 ] 等方面都有一定的发展并展现出较大潜力. ...
1
... 经过长期发展,目前雷达的作用不再局限于单纯的测距、测角等,还可以对运动中的目标属性进行相应的表征. 具体来说,所监测的目标在运动时会对雷达信号的频率和相位进行调制,从而在回波信号的主频率周围产生额外的频率分量,这就是Chen等[5 ] 提出的微多普勒特征. 可将微多普勒特征视为目标身体各个部分与整个主体之间在运动时表现出来的差异,理论上包含目标的形状、结构和动作速度等特性. 在实际应用中,微多普勒特征在目标识别(行人、自行车和汽车)[6 ] 和动作分类[7 -9 ] 等方面都有一定的发展并展现出较大潜力. ...
Human activity classification based on micro-Doppler signatures using a support vector machine
1
2009
... 经过长期发展,目前雷达的作用不再局限于单纯的测距、测角等,还可以对运动中的目标属性进行相应的表征. 具体来说,所监测的目标在运动时会对雷达信号的频率和相位进行调制,从而在回波信号的主频率周围产生额外的频率分量,这就是Chen等[5 ] 提出的微多普勒特征. 可将微多普勒特征视为目标身体各个部分与整个主体之间在运动时表现出来的差异,理论上包含目标的形状、结构和动作速度等特性. 在实际应用中,微多普勒特征在目标识别(行人、自行车和汽车)[6 ] 和动作分类[7 -9 ] 等方面都有一定的发展并展现出较大潜力. ...
Fall detection using deep learning in range-Doppler radars
0
2017
Deep convolutional autoencoder for radar-based classification of similar aided and unaided human activities
1
2018
... 经过长期发展,目前雷达的作用不再局限于单纯的测距、测角等,还可以对运动中的目标属性进行相应的表征. 具体来说,所监测的目标在运动时会对雷达信号的频率和相位进行调制,从而在回波信号的主频率周围产生额外的频率分量,这就是Chen等[5 ] 提出的微多普勒特征. 可将微多普勒特征视为目标身体各个部分与整个主体之间在运动时表现出来的差异,理论上包含目标的形状、结构和动作速度等特性. 在实际应用中,微多普勒特征在目标识别(行人、自行车和汽车)[6 ] 和动作分类[7 -9 ] 等方面都有一定的发展并展现出较大潜力. ...
Gait analysis methods: an overview of wearable and non-wearable systems, highlighting clinical applications
1
2014
... 步态是人类的生物学特征之一,依靠步态识别,能检测侵入家庭中的陌生人,甚至辅助诊断一些类似帕金森综合征的疾病(患病后行走姿态发生改变)[10 ] . 前人研究中使用的实验对象之间具有较大的区分度,例如,Saho等[11 ] 使用模拟的微多普勒遥感数据中的速度参数来识别健康的年轻人和老年人;Tivive等[12 ] 利用短时傅里叶变换(short-time Fourier transform,STFT)和多层滤波器提取特征来区分自由臂摆动、单臂摆动和无臂摆动3种行走动作;Seifert等[13 ] 通过节奏速度图(cadence-velocity diagram,CVD)来观察特定的多普勒频移出现的频率,并对正常行走、单脚跛行、双脚跛行、同步拐杖行走和非同步拐杖行走这5种步态进行识别. 在上述研究中,所研究的步态类型之间差异较大;所使用的数据表示域—时频图(time-Doppler map,TDM)丢失了目标的距离信息;最重要的是,步行数据都是沿着雷达视线方向(line of sight,LOS)产生的,也就是说,实验目标须沿着雷达径向方向行走,这将在实际应用中带来诸多不便. ...
Gait classification of young adults, elderly non-fallers, and elderly fallers using micro-doppler radar signals: simulation study
2
2017
... 步态是人类的生物学特征之一,依靠步态识别,能检测侵入家庭中的陌生人,甚至辅助诊断一些类似帕金森综合征的疾病(患病后行走姿态发生改变)[10 ] . 前人研究中使用的实验对象之间具有较大的区分度,例如,Saho等[11 ] 使用模拟的微多普勒遥感数据中的速度参数来识别健康的年轻人和老年人;Tivive等[12 ] 利用短时傅里叶变换(short-time Fourier transform,STFT)和多层滤波器提取特征来区分自由臂摆动、单臂摆动和无臂摆动3种行走动作;Seifert等[13 ] 通过节奏速度图(cadence-velocity diagram,CVD)来观察特定的多普勒频移出现的频率,并对正常行走、单脚跛行、双脚跛行、同步拐杖行走和非同步拐杖行走这5种步态进行识别. 在上述研究中,所研究的步态类型之间差异较大;所使用的数据表示域—时频图(time-Doppler map,TDM)丢失了目标的距离信息;最重要的是,步行数据都是沿着雷达视线方向(line of sight,LOS)产生的,也就是说,实验目标须沿着雷达径向方向行走,这将在实际应用中带来诸多不便. ...
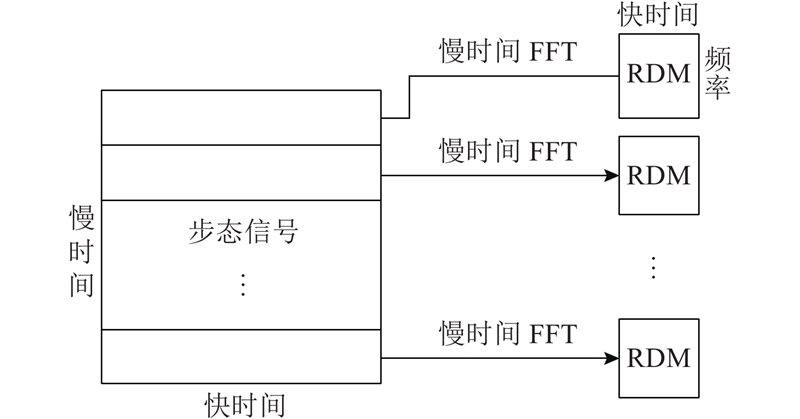
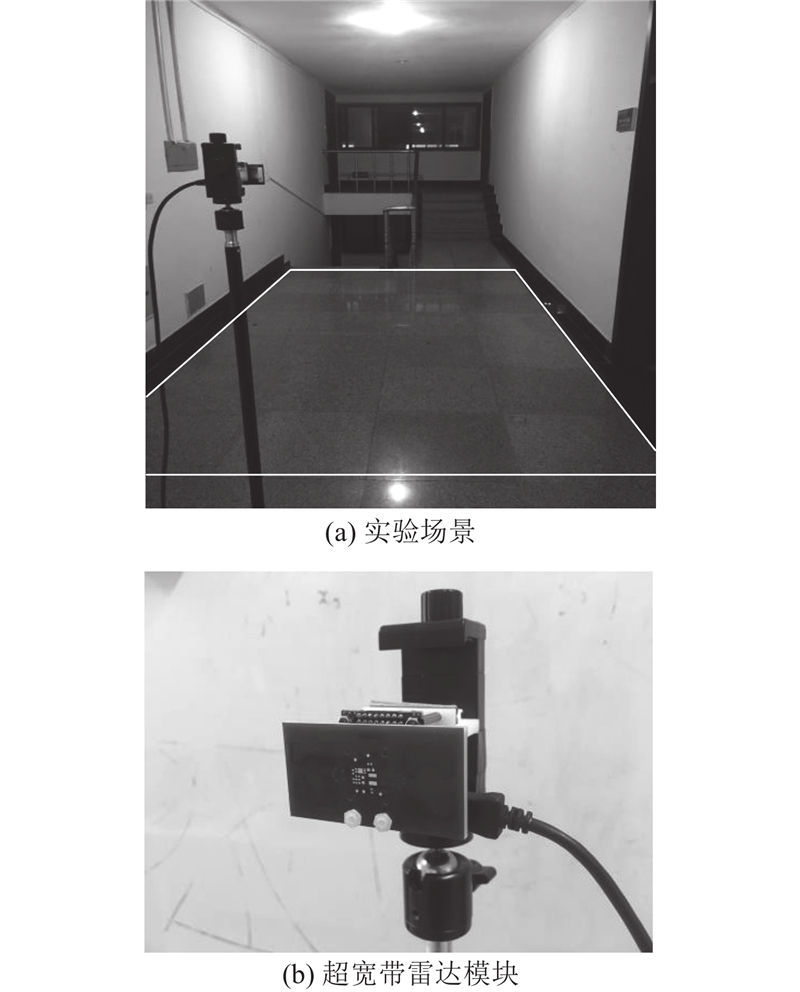
... 实验目标共有4人,信息如表1 所示. 不同于前人论文中那些相互之间具有较大生物学区分度的实验目标[11 -13 ] ,本研究所选取的目标年龄相仿且身体健康,因此步态特征较为接近,相对而言更具有挑战性. 系统探测范围设定为0~5 m,出于对典型行走动作的多普勒频率和采样定理的考虑,帧率设置为250帧/s. 对于每个目标来说,在雷达扫描时要求其独自在实验空间中自由行走,每个样本记录时长为2 s(2 s足够进行一次迈步),共收集534个步态样本. 沿着慢时间轴对样本信号进行分割,分割长度为100点,前后重叠50点,产生9个子信号. 须声明的是,分割时的参数是对计算量、时间分辨率和频率分辨率权衡考虑的结果,代表一种可行值. 对于子信号,利用奇异值分解(singular value decomposition,SVD)算法[27 ] 滤除其位于低秩空间中的静态和低频杂波后生成一组RDM,在进行灰度化后将每个RDM的尺寸调整为64×32以降低计算复杂度,这样每个步态样本包括9张前后存在时序关系的RDM,以提供给后续的识别模型进行性能统计评估. ...
A humangait classification method based on radar Doppler spectrograms
1
2010
... 步态是人类的生物学特征之一,依靠步态识别,能检测侵入家庭中的陌生人,甚至辅助诊断一些类似帕金森综合征的疾病(患病后行走姿态发生改变)[10 ] . 前人研究中使用的实验对象之间具有较大的区分度,例如,Saho等[11 ] 使用模拟的微多普勒遥感数据中的速度参数来识别健康的年轻人和老年人;Tivive等[12 ] 利用短时傅里叶变换(short-time Fourier transform,STFT)和多层滤波器提取特征来区分自由臂摆动、单臂摆动和无臂摆动3种行走动作;Seifert等[13 ] 通过节奏速度图(cadence-velocity diagram,CVD)来观察特定的多普勒频移出现的频率,并对正常行走、单脚跛行、双脚跛行、同步拐杖行走和非同步拐杖行走这5种步态进行识别. 在上述研究中,所研究的步态类型之间差异较大;所使用的数据表示域—时频图(time-Doppler map,TDM)丢失了目标的距离信息;最重要的是,步行数据都是沿着雷达视线方向(line of sight,LOS)产生的,也就是说,实验目标须沿着雷达径向方向行走,这将在实际应用中带来诸多不便. ...
Toward unobtrusive in-home gait analysis based on radar micro-doppler signatures
2
2019
... 步态是人类的生物学特征之一,依靠步态识别,能检测侵入家庭中的陌生人,甚至辅助诊断一些类似帕金森综合征的疾病(患病后行走姿态发生改变)[10 ] . 前人研究中使用的实验对象之间具有较大的区分度,例如,Saho等[11 ] 使用模拟的微多普勒遥感数据中的速度参数来识别健康的年轻人和老年人;Tivive等[12 ] 利用短时傅里叶变换(short-time Fourier transform,STFT)和多层滤波器提取特征来区分自由臂摆动、单臂摆动和无臂摆动3种行走动作;Seifert等[13 ] 通过节奏速度图(cadence-velocity diagram,CVD)来观察特定的多普勒频移出现的频率,并对正常行走、单脚跛行、双脚跛行、同步拐杖行走和非同步拐杖行走这5种步态进行识别. 在上述研究中,所研究的步态类型之间差异较大;所使用的数据表示域—时频图(time-Doppler map,TDM)丢失了目标的距离信息;最重要的是,步行数据都是沿着雷达视线方向(line of sight,LOS)产生的,也就是说,实验目标须沿着雷达径向方向行走,这将在实际应用中带来诸多不便. ...
... 实验目标共有4人,信息如表1 所示. 不同于前人论文中那些相互之间具有较大生物学区分度的实验目标[11 -13 ] ,本研究所选取的目标年龄相仿且身体健康,因此步态特征较为接近,相对而言更具有挑战性. 系统探测范围设定为0~5 m,出于对典型行走动作的多普勒频率和采样定理的考虑,帧率设置为250帧/s. 对于每个目标来说,在雷达扫描时要求其独自在实验空间中自由行走,每个样本记录时长为2 s(2 s足够进行一次迈步),共收集534个步态样本. 沿着慢时间轴对样本信号进行分割,分割长度为100点,前后重叠50点,产生9个子信号. 须声明的是,分割时的参数是对计算量、时间分辨率和频率分辨率权衡考虑的结果,代表一种可行值. 对于子信号,利用奇异值分解(singular value decomposition,SVD)算法[27 ] 滤除其位于低秩空间中的静态和低频杂波后生成一组RDM,在进行灰度化后将每个RDM的尺寸调整为64×32以降低计算复杂度,这样每个步态样本包括9张前后存在时序关系的RDM,以提供给后续的识别模型进行性能统计评估. ...
History of ultra wideband commun-ications and radar
2
2001
... 超宽带雷达是工作带宽大于或等于其中心频率20%或瞬时带宽大于500 MHz的新型雷达,往往依靠发射绝对宽谱的极窄脉冲信号或低功率的调频连续波来探知外界环境[14 ] . 相比于传统的窄带雷达,超宽带雷达由于信号能量散布在宽带宽中,因此抗干扰能力较强,且不易干扰其他电磁波器件的工作;雷达的距离分辨率和发射信号带宽成正比,因此超宽带雷达具有较高的目标识别能力;目前超宽带雷达已经可以依靠全数字化结构来实现,电路简单、成本低廉,同时系统耗电可以控制在较低水平[14 -15 ] . ...
... [14 -15 ]. ...
1
... 超宽带雷达是工作带宽大于或等于其中心频率20%或瞬时带宽大于500 MHz的新型雷达,往往依靠发射绝对宽谱的极窄脉冲信号或低功率的调频连续波来探知外界环境[14 ] . 相比于传统的窄带雷达,超宽带雷达由于信号能量散布在宽带宽中,因此抗干扰能力较强,且不易干扰其他电磁波器件的工作;雷达的距离分辨率和发射信号带宽成正比,因此超宽带雷达具有较高的目标识别能力;目前超宽带雷达已经可以依靠全数字化结构来实现,电路简单、成本低廉,同时系统耗电可以控制在较低水平[14 -15 ] . ...
微动目标雷达特征提取、成像与识别研究进展
1
2018
... 极窄脉冲体制的超宽带雷达相较于连续波雷达更易获得宽带宽和低功耗的特性,从而适用于步态识别任务.对于拥有复杂外形的目标(例如人体),雷达回波信号由多径分量组成,意味着电磁波信号在变化的时间中以不同的幅度独立地从各个人体部分进行散射[16 ] ,每个散射路径可以视作超宽带雷达回波信号的一个多径成分. 根据Tsao等[17 ] 提出的超宽带多径信号模型,单站脉冲超宽带雷达的接收信号可以表示为 ...
微动目标雷达特征提取、成像与识别研究进展
1
2018
... 极窄脉冲体制的超宽带雷达相较于连续波雷达更易获得宽带宽和低功耗的特性,从而适用于步态识别任务.对于拥有复杂外形的目标(例如人体),雷达回波信号由多径分量组成,意味着电磁波信号在变化的时间中以不同的幅度独立地从各个人体部分进行散射[16 ] ,每个散射路径可以视作超宽带雷达回波信号的一个多径成分. 根据Tsao等[17 ] 提出的超宽带多径信号模型,单站脉冲超宽带雷达的接收信号可以表示为 ...
Prediction and modeling for the time-evolving ultra-wide band channel
1
2007
... 极窄脉冲体制的超宽带雷达相较于连续波雷达更易获得宽带宽和低功耗的特性,从而适用于步态识别任务.对于拥有复杂外形的目标(例如人体),雷达回波信号由多径分量组成,意味着电磁波信号在变化的时间中以不同的幅度独立地从各个人体部分进行散射[16 ] ,每个散射路径可以视作超宽带雷达回波信号的一个多径成分. 根据Tsao等[17 ] 提出的超宽带多径信号模型,单站脉冲超宽带雷达的接收信号可以表示为 ...
1
... 当忽略散射体距离信息时,可以通过STFT[18 ] 计算得到接收信号的时频表示,反映信号频率分布随着时间的变化情况. 计算得到的功率谱分布表达式为 ...
1
... 在计算机视觉和自然语言处理研究领域中,时序分析已经被成功用于运动轨迹预测[19 ] 、视频字幕生成[20 ] 等,并正在不断扩展到其他应用中. 人体的行走动作是动态过程,如图3 所示,RDM摒弃传统的“静态”表示方式(依靠单一TDM),转而“动态”地描述步态的特征随时间的变化情况,这种数据表示域为引入时序分析提供了理论支持. ...
1
... 在计算机视觉和自然语言处理研究领域中,时序分析已经被成功用于运动轨迹预测[19 ] 、视频字幕生成[20 ] 等,并正在不断扩展到其他应用中. 人体的行走动作是动态过程,如图3 所示,RDM摒弃传统的“静态”表示方式(依靠单一TDM),转而“动态”地描述步态的特征随时间的变化情况,这种数据表示域为引入时序分析提供了理论支持. ...
1
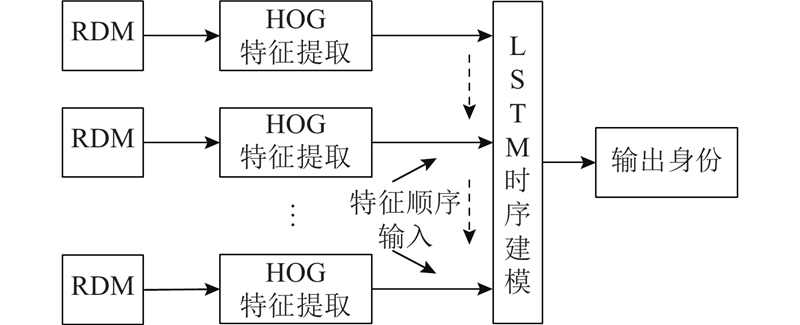
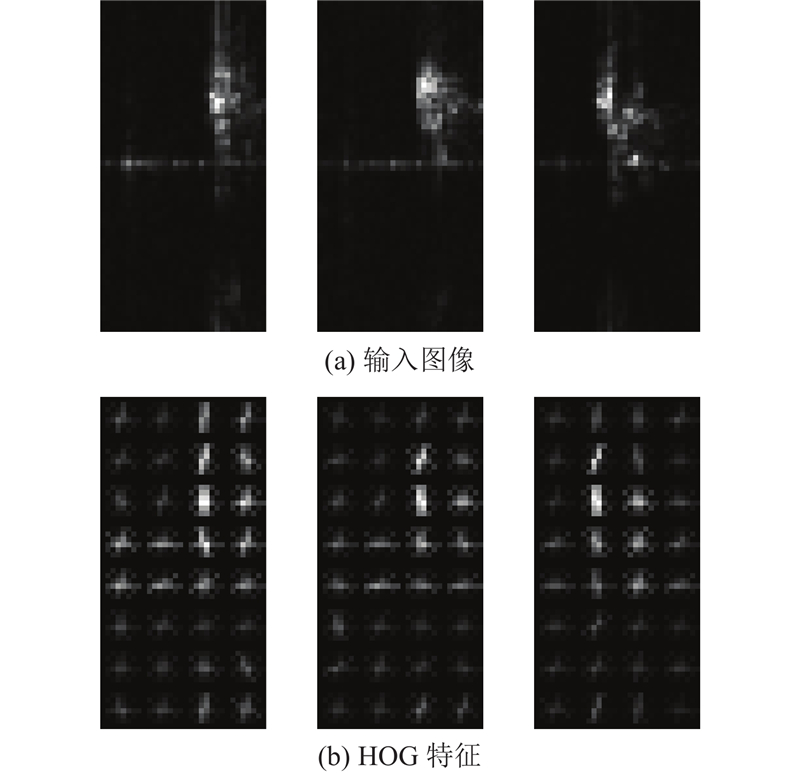
... 能量在频率和距离轴上的变化构成RDM,与传统意义上的图像相比,RDM中展示的形状和纹理更为直观与简洁,可以较好地被梯度或边缘方向密度描述. 使用在计算机视觉领域广泛使用的算法—HOG[21 ] 作为特征描述子对其进行特征提取. 这种算法通过统计图像局部区域内的像素变化情况来作为表征形状和纹理的依据. 与基于统计学习的卷积神经网络(convolutional neural networks,CNN)[22 ] 相比,HOG不需要海量的数据来进行训练,且计算复杂度较低,较适用于本研究任务. ...
Deep conv-olutional neural networks for computeraided detection: CNN architectures, dataset characteristics and transfer learning
1
2016
... 能量在频率和距离轴上的变化构成RDM,与传统意义上的图像相比,RDM中展示的形状和纹理更为直观与简洁,可以较好地被梯度或边缘方向密度描述. 使用在计算机视觉领域广泛使用的算法—HOG[21 ] 作为特征描述子对其进行特征提取. 这种算法通过统计图像局部区域内的像素变化情况来作为表征形状和纹理的依据. 与基于统计学习的卷积神经网络(convolutional neural networks,CNN)[22 ] 相比,HOG不需要海量的数据来进行训练,且计算复杂度较低,较适用于本研究任务. ...
基于小波变换与差分自回归移动平均模型的微博话题热度预测
1
2015
... 在人工智能领域中,差分自回归移动平均模型(auto-regressive integrated moving average model,ARIMA)[23 ] 和隐马尔科夫模型(hidden Markov model,HMM)[24 ] 等传统的时序建模算法被广泛应用于各种任务中.近些年来,LSTM[25 -26 ] 在许多场合都展现出了更佳的表现. 作为循环神经网络(recurrent neural networks,RNN)的特例,LSTM利用细胞状态(cell state)隐状态(hidden state)在单元间的传递来存储信息,因此对长间隔的时序信息具有更好的建模效果.LSTM单元的信息流动情况如图6 所示. ...
基于小波变换与差分自回归移动平均模型的微博话题热度预测
1
2015
... 在人工智能领域中,差分自回归移动平均模型(auto-regressive integrated moving average model,ARIMA)[23 ] 和隐马尔科夫模型(hidden Markov model,HMM)[24 ] 等传统的时序建模算法被广泛应用于各种任务中.近些年来,LSTM[25 -26 ] 在许多场合都展现出了更佳的表现. 作为循环神经网络(recurrent neural networks,RNN)的特例,LSTM利用细胞状态(cell state)隐状态(hidden state)在单元间的传递来存储信息,因此对长间隔的时序信息具有更好的建模效果.LSTM单元的信息流动情况如图6 所示. ...
BCFtools/RoH: a hidden Markov model approach for detecting autozygosity from next-generation sequencing data
1
2016
... 在人工智能领域中,差分自回归移动平均模型(auto-regressive integrated moving average model,ARIMA)[23 ] 和隐马尔科夫模型(hidden Markov model,HMM)[24 ] 等传统的时序建模算法被广泛应用于各种任务中.近些年来,LSTM[25 -26 ] 在许多场合都展现出了更佳的表现. 作为循环神经网络(recurrent neural networks,RNN)的特例,LSTM利用细胞状态(cell state)隐状态(hidden state)在单元间的传递来存储信息,因此对长间隔的时序信息具有更好的建模效果.LSTM单元的信息流动情况如图6 所示. ...
1
... 在人工智能领域中,差分自回归移动平均模型(auto-regressive integrated moving average model,ARIMA)[23 ] 和隐马尔科夫模型(hidden Markov model,HMM)[24 ] 等传统的时序建模算法被广泛应用于各种任务中.近些年来,LSTM[25 -26 ] 在许多场合都展现出了更佳的表现. 作为循环神经网络(recurrent neural networks,RNN)的特例,LSTM利用细胞状态(cell state)隐状态(hidden state)在单元间的传递来存储信息,因此对长间隔的时序信息具有更好的建模效果.LSTM单元的信息流动情况如图6 所示. ...
1
... 在人工智能领域中,差分自回归移动平均模型(auto-regressive integrated moving average model,ARIMA)[23 ] 和隐马尔科夫模型(hidden Markov model,HMM)[24 ] 等传统的时序建模算法被广泛应用于各种任务中.近些年来,LSTM[25 -26 ] 在许多场合都展现出了更佳的表现. 作为循环神经网络(recurrent neural networks,RNN)的特例,LSTM利用细胞状态(cell state)隐状态(hidden state)在单元间的传递来存储信息,因此对长间隔的时序信息具有更好的建模效果.LSTM单元的信息流动情况如图6 所示. ...
Analysis of clutter reduction techniques for through wall imaging in UWB range
1
2009
... 实验目标共有4人,信息如表1 所示. 不同于前人论文中那些相互之间具有较大生物学区分度的实验目标[11 -13 ] ,本研究所选取的目标年龄相仿且身体健康,因此步态特征较为接近,相对而言更具有挑战性. 系统探测范围设定为0~5 m,出于对典型行走动作的多普勒频率和采样定理的考虑,帧率设置为250帧/s. 对于每个目标来说,在雷达扫描时要求其独自在实验空间中自由行走,每个样本记录时长为2 s(2 s足够进行一次迈步),共收集534个步态样本. 沿着慢时间轴对样本信号进行分割,分割长度为100点,前后重叠50点,产生9个子信号. 须声明的是,分割时的参数是对计算量、时间分辨率和频率分辨率权衡考虑的结果,代表一种可行值. 对于子信号,利用奇异值分解(singular value decomposition,SVD)算法[27 ] 滤除其位于低秩空间中的静态和低频杂波后生成一组RDM,在进行灰度化后将每个RDM的尺寸调整为64×32以降低计算复杂度,这样每个步态样本包括9张前后存在时序关系的RDM,以提供给后续的识别模型进行性能统计评估. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}