

近年来,国内外学者开始关注双足机器人动态步行的鲁棒控制问题[7-9]. 相比准静态步行,动态步行[10]不关注机器人的局部稳定性,通常基于庞卡莱映射方法,从动力学模型及其解的角度,分析步态的全局稳定性. 针对外部作用力下的动态步行双足机器人,Veer等[11]假设作用力信息已知,提出混杂零动力学控制方法,并给出稳定动态步行的解析条件. Wang等[12]考虑机器人在双足支撑期受到外部作用力的情形,将机器人的抗扰动控制问题转化为动态平衡优化问题,并提出基于递归神经网络的运动/力混合控制方法. 为了实现非平整路面下的动态稳定步行,Hamed等[13]提出连续控制器设计方法,并基于庞卡莱分析,将控制器的参数设计问题转化为双线性矩阵不等式(bilinear matrix inequality,BMI)优化问题. Sun等[14]将非平整路面步行控制问题统一转化为虚拟斜坡步行控制问题,并基于倒立摆模型,提出神经网络控制方法. 总体来看,国内外学者关于动态步行鲁棒控制的研究主要考虑非平整路面[14-15]、限时不变作用力[16-17]以及周期作用力[11,18]等外部扰动情形. 在实际中,机器人的外部扰动,如风力以及人为牵引力等,可能具有时变性和随机性. 在此情形下,对机器人外部扰动的幅值的估计难免会存在误差. 目前,国内外学者较少关注不确定性扰动下双足机器人动态步行的鲁棒控制问题. 研究[19]表明,当存在不确定性扰动时,动力学系统的状态轨迹会密集地分布于相空间,而不会收敛到某一轨道,这使得其长期动力学行为的描述没有意义,从而难以利用常规的庞卡莱映射方法对其进行稳定性分析.
针对以上问题,本研究将随机振动系统的特定庞卡莱映射方法拓展到不确定性扰动下双足机器人的稳定性分析. 为了实现不确定性扰动下双足机器人的鲁棒控制,提出自适滑模控制器. 考虑到双足机器人在实际应用中常会遭遇非平整路面,进一步将该控制器拓展到非平整路面的鲁棒控制.
1. 不确定性扰动下的动力学建模
如图1所示,三维 (3-D)双足机器人由躯干、2条大腿以及2条小腿构成. 其中,小腿长
图 1

在单足支撑相阶段,假设机器人受到不确定性扰动的影响,如图2所示. 为了便于分析,假设不确定性扰动水平作用于质心. 根据拉格朗日建模法,机器人在单足支撑相的动力学模型的表达式为
图 2

式中:
式中:
其中,
在单足支撑相阶段,定义状态向量
式中:
在双足支撑相阶段,选取广义坐标向量
式中:
式中:
结合式(4)、(6),机器人在不确定性扰动下的动力学模型可表示为
式中:
2. 稳定性分析
在不确定性扰动作用下,动力学系统的状态轨迹会密集地分布于相空间,而不会收敛到某一轨道,这使得其长期动力学行为的描述没有意义[19],从而难以利用常规的庞卡莱映射方法对此类系统进行稳定性分析.
记随机过程
为了应用特定庞卡莱映射方法,对机器人的不确定性扰动作周期化处理. 对于任意正整数
这种周期化处理是合理的,因为研究只关注机器人在
式中:
系统(式(11))可以视为具有
式中:
定义其第
从而,特定庞卡莱映射可被定义为
由特定庞卡莱映射
由上述分析可看出,特定庞卡莱映射方法是由常规庞卡莱映射方法发展而来的,但特定庞卡莱映射方法只关注系统在有限时间内的稳定性,并须先对外部扰动作周期化处理,将不确定性系统转化为确定性周期系统,然后便可基于常规庞卡莱映射方法进行处理. 若系统本身为确定性周期系统,则可直接利用常规庞卡莱映射方法进行稳定性分析.
3. 自适应滑模控制
图 3
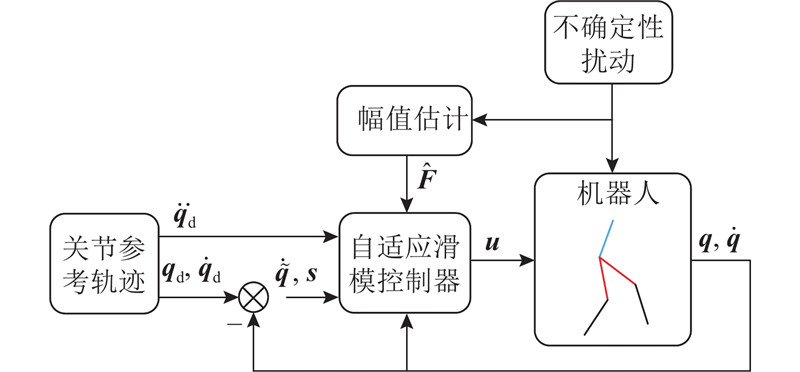
图 3 基于自适应滑模控制器的机器人控制系统框图
Fig.3 Block diagram of robot control system based on adaptive sliding-mode controller
1)符号说明.
2)控制目标. 机器人各关节的参考轨迹记为
记其元
此时,若定义Lyapunov函数
3)控制器设计. 设机器人第
式中:
控制器(式(17))的收敛性的简单证明如下. 首先,对式(15)求导,并结合式(9)、(17),可以得到
令
此外,由于
所以,当
再将其代入式(19),有
在实际中,对机器人外部扰动的幅值估计难免会存在误差. 因此,控制器须对幅值估计误差有一定的适应性,特别是当外部扰动的估计幅值小于实际幅值时,控制系统不至于发散失稳. 设机器人第
因此,当外部扰动的幅值估计在一定范围内偏大或偏小时,控制系统仍然收敛. 实际上,当外部扰动的幅值估计偏小时,根据式(19),
4. 非平整路面的鲁棒控制
考虑到双足机器人在实际应用中常会遭遇非平整路面,进一步将自适应滑模控制器拓展到非平整路面的鲁棒控制. 在非平整路面上行走时,机器人容易失稳摔倒的重要原因是其与地面碰撞后会产生较大的速度突变,导致系统状态远离预定的参考轨迹[7]. 为了实现非平整路面下的鲁棒控制,本研究提出碰撞速度不变性条件,基于落地速度控制进行在线轨迹规划以避免碰撞带来过大的速度突变,再基于自适应滑模控制器对机器人进行反馈控制.
1)碰撞速度不变性条件. 对于碰撞方程(式(5)),若机器人的落地速度
从而有
将
将其代入式(23),可得
2)基于落地速度控制的在线轨迹规划. 为了控制落地速度,根据机器人预估落地位置进行在线轨迹规划,并以支撑腿关节
式中:
将摆动脚的轨迹设计为
式中:
3)关节角度计算与控制. 为了应用自适应滑模控制器(式(17)),须计算摆动腿关节
图 4

直接利用式(29)对时间求导来获得
从而
再对式(30)求导,可得
从而有
至此,已获得各个关节参考轨迹的角度信息、角速度信息以及角加速度信息,从而可利用控制器(式(17))对机器人进行鲁棒控制.
5. 仿真实验
以下仿真实验假设机器人在第
1)初始步态参数设置. 在无扰动情形下,机器人的行走步态左右对称,以左脚支撑相为例,机器人各个关节的初始状态和末状态分别为
根据初始状态
2)随机过程的样本生成. 为了开展不确性扰动下的动态步行仿真实验,生成了4组随机过程的样本,如图5所示为样本随时间t的变化. 其中,样本
图 5

5.1. 滑模控制器的适应性验证
为了验证所设计滑模控制器对外部扰动幅值估计误差的适应性,假设机器人在第
图 6
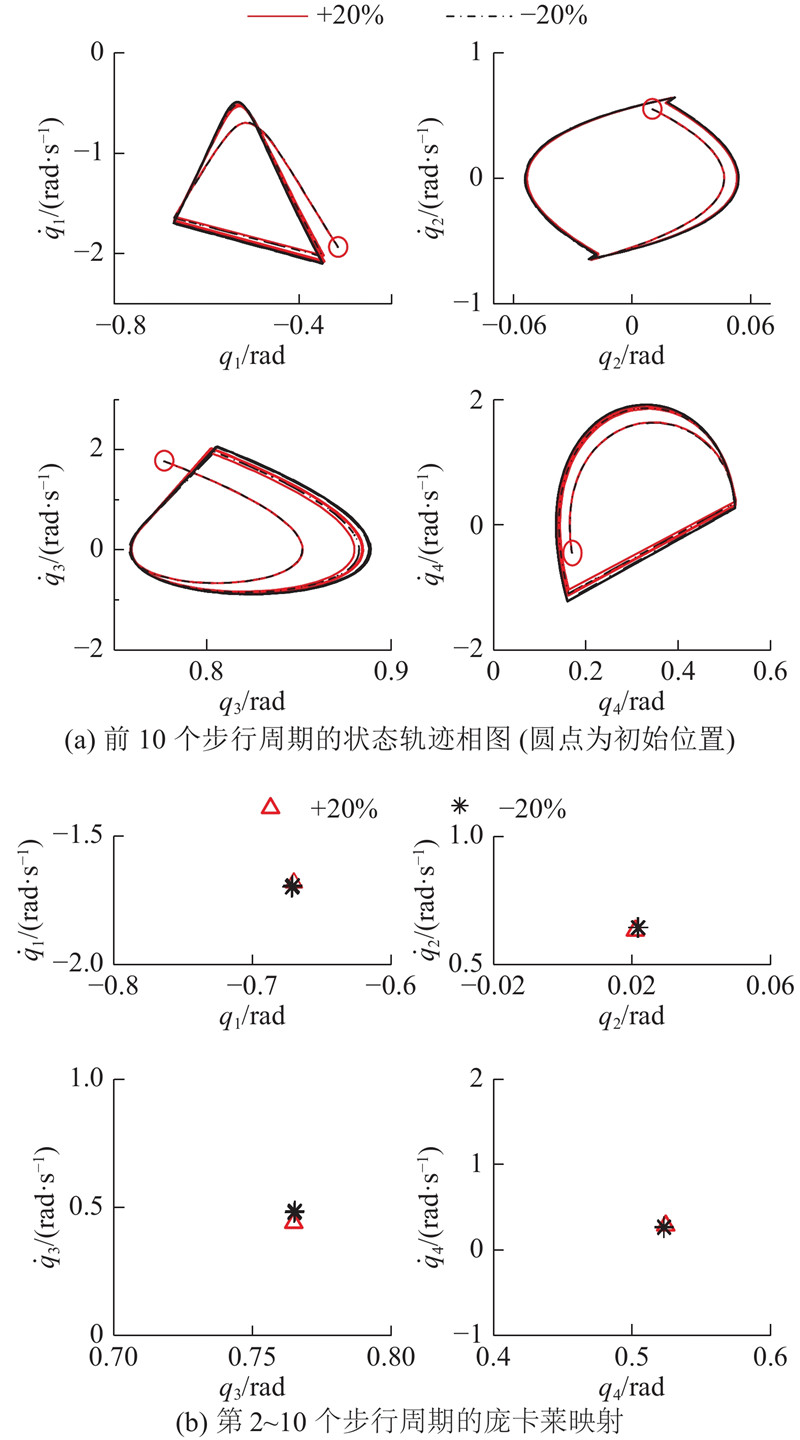
图 6 对外部扰动的幅值估计存在误差时机器人系统的状态轨迹相图与庞卡莱映射
Fig.6 Phase portraits and Poincaré map for robot system without accurate estimation of magnitude information of external disturbances
5.2. 滑模控制器的参数分析
为了进一步分析控制器参数
图 7

图 7 不同控制器参数下机器人状态轨迹相图与特定庞卡莱映射图
Fig.7 Phase portraits and Poincaré map for robot system subject to different controller parameters
5.3. 不确定性扰动下机器人动态步行的鲁棒性验证
为了验证不确定性扰动下机器人动态步行的鲁棒性,根据5.2节的内容,关注机器人在有限步数
图 8

图 8 不确定性扰动作用下机器人状态轨迹相图与特定庞卡莱映射
Fig.8 Phase portraits and specific Poincaré map for biped robot subject to uncertain disturbances
5.4. 非平整路面上机器人动态步行的鲁棒性验证
考虑机器人在非平整路面受到不确定性扰动作用的情形,同样关注机器人在
图 9
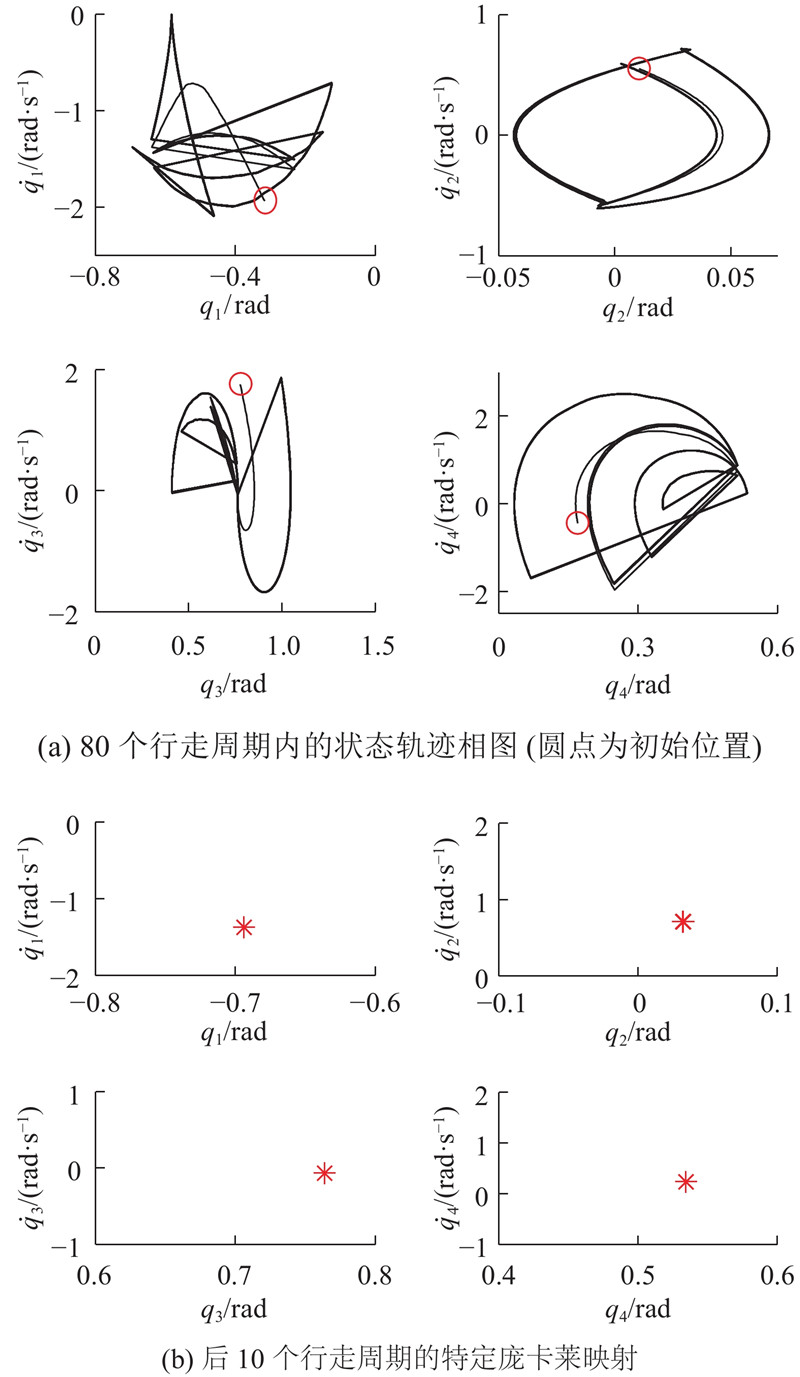
图 9 非平整路面上不确定性扰动作用下机器人状态轨迹相图与特定庞卡莱映射图
Fig.9 Phase portraits and specific Poincaré map for biped robot subject to uncertain disturbances and uneven terrains
6. 结 论
(1)将随机振动系统的特定庞卡莱映射方法拓展到不确定性扰动下双足机器人的稳定性分析,并给出了双足机器人特定庞卡莱映射的构建方法.
(2)基于滑模控制方法,提出自适应滑模控制器. 仿真结果表明,该控制器对外部扰动的幅值估计误差具有较好的适应性;控制器的跟踪性能与控制器参数
(3)将自适应滑模控制器拓展到非平整路面的鲁棒控制. 通过在线规划控制机器人的落地速度,并基于自适应滑模控制器进行反馈控制,机器人在仿真实验中能实现相对高度在
(4)后续工作将考虑将自适应滑模控制器拓展到具有不确定性动力学模型的双足机器人系统.
参考文献
Bio-inspired control of walking with toe-off, heel-strike and disturbance rejection for a biped robot
[J].DOI:10.1109/TIE.2017.2698361 [本文引用: 1]
Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot
[J].DOI:10.1007/s10514-015-9479-3 [本文引用: 1]
Robust optimal planning and control of non-Periodic bipedal locomotion with a centroidal momentum model
[J].
Analysis of human−robot interaction at the DARPA robotics challenge trials
[J].DOI:10.1002/rob.21568 [本文引用: 1]
Adaptive speed controller using swing leg motion for 3-D limit-cycle-based bipedal gait
[J].
基于步态切换的欠驱动双足机器人控制方法
[J].DOI:10.6052/0459-1879-18-049 [本文引用: 2]
Control method of an underactuated biped robot based on gait transition
[J].DOI:10.6052/0459-1879-18-049 [本文引用: 2]
A novel adaptive neural network integral sliding-mode control of a biped robot using bat algorithm
[J].
Biped locomotion control through a biomimetic CPG-based controller
[J].
动态双足机器人的控制与优化研究进展
[J].
A review of optimal and control strategies for dynamic walking bipedal robots
[J].
Dynamical balance optimization and control of biped robots in double-support phase under perturbing external forces
[J].
Exponentially stabilizing continuous-time controllers for periodic orbits of hybrid systems: application to bipedal locomotion with ground height variations
[J].DOI:10.1177/0278364915593400 [本文引用: 1]
Dynamically stable walk control of biped humanoid on uneven and inclined terrain
[J].DOI:10.1016/j.neucom.2017.08.077 [本文引用: 2]
Stable dynamic walking over uneven terrain
[J].DOI:10.1177/0278364910395339 [本文引用: 1]
Control strategy for the robust dynamic walk of a biped robot
[J].DOI:10.1177/0278364906069151 [本文引用: 1]
Event-based stabilization of periodic orbits for underactuated 3-D bipedal robots with left-right symmetry
[J].DOI:10.1109/TRO.2013.2287831 [本文引用: 2]
Specific Poincaré map for a randomly-perturbed nonlinear oscillator
[J].
Digital simulation of random processes and its applications
[J].DOI:10.1016/0022-460X(72)90600-1 [本文引用: 1]
A kind of noise-induced transition to noisy chaos in stochastically perturbed dynamical system
[J].DOI:10.1007/s10409-012-0084-9 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}