[1]
李勇. CRH1型动车组牵引传动系统仿真研究[D]. 成都:西南交通大学, 2012: 9.
[本文引用: 1]
LI Yong. CRH1 Type EMU traction drive system simulation research [D]. Chengdu: Southwest Jiaotong University, 2012: 9.
[本文引用: 1]
[2]
宋雷鸣. 动车组传动与控制[M]. 北京: 中国铁道出版社, 2009.
[3]
魏振兴. CRH2型动车组传动控制系统仿真[D]. 成都: 西南交通大学, 2012: 15.
[本文引用: 2]
WEI Zhen-xing. The simulation of CRH2 type EMU transmission control system [D]. Chengdu: Southwest Jiaotong University, 2012: 15.
[本文引用: 2]
[4]
熊盛艳. CRH5型动车组牵引变流器的研究[D]. 成都: 西南交通大学, 2013: 4.
XIONG Sheng-yan. The study of the traction converter in electrical multiple units of CRH5. Chengdu: Southwest Jiaotong University, 2013: 4.
[6]
AKAGI H, KANAZAWA Y, NABAE A Instantaneous reactive power compensators comprising switching devices without energy storage components
[J]. IEEE Transactions on Industry Applications , 1984 , 20 (3 ): 625 - 630
[本文引用: 1]
[7]
孙大南. 地铁车辆牵引电传动系统控制关键技术研究[D]. 北京: 北京交通大学, 2012: 4–54.
[本文引用: 1]
SUN Da-nan. Research on key control technologies of electric traction drive system for metro cars [D]. Beijing: Beijing Jiaotong University, 2012: 4–54.
[本文引用: 1]
[8]
KIM J, JEONG I, LEE K, et al Fluctuating current control method for a PMSM along constant torque contours
[J]. IEEE Transactions on Power Electronics , 2014 , 29 (11 ): 6064 - 6073
DOI:10.1109/TPEL.2014.2299548
[本文引用: 1]
[9]
SALAM Z, GOODMAN C. Compensation of fluctuating DC link voltage for traction inverter drive [C]// Sixth International Conference on Power Electronics and Variable Speed Drives . Nottingham: IET, 1996: 390–395.
[本文引用: 1]
[10]
HADJI S, TOUHAMI O, GOODMAN C Vector -optimised harmonic elimination for single-phase pulse-width modulation inverters/converters
[J]. IET Electric Power Applications , 2007 , 1 (3 ): 423 - 432
DOI:10.1049/iet-epa:20060213
[11]
CHEN Y M, HSIEH C H, CHENG Y M. Modified SPWM control schemes for three-phase inverters [C] // 4th IEEE International Conference on Power Electronics and Drive Systems . Denpaser: IEEE, 2001: 651–656.
[12]
FUNABIKI S, SAWADA Y. A computative decision of pulse width in three-phase PWM inverter [C]// 1988 IEEE Industry Applications Society Annual Meeting . Pittsburgh: IEEE, 1988: 694–699.
[13]
ENJETI P, SHIREEN W A new technique to reject DC-link voltage ripple for inverters operating on programmed PWM waveforms
[J]. IEEE Transactions on Power Electronics , 1992 , 7 (1 ): 171 - 180
DOI:10.1109/63.124589
[本文引用: 1]
[14]
GOU B, FENG X, SONG W, et al. Analysis and compensation of beat phenomenon for railway traction drive system fed with fluctuating DC-link voltage [C]// 7th International Power Electronics and Motion Control Conference . Harbin: IEEE, 2012: 654–659.
[本文引用: 1]
[15]
董侃. 动车组牵引逆变控制关键技术与系统性能优化研究[D]. 北京:北京交通大学, 2015, 17–43.
[本文引用: 1]
DONG Kan. Research on key control technologies and performance optimization of traction drive system for EMUs [D]. Beijing: Beijing Jiaotong University, 2015, 17–43.
[本文引用: 1]
[16]
OUYANG H, ZHANG K, ZHANG P, et al Repetitive compensation of fluctuating DC link voltage for railway traction drives
[J]. IEEE Transactions on Power Electronics , 2011 , 26 (8 ): 2160 - 2171
DOI:10.1109/TPEL.2011.2105283
[本文引用: 5]
[17]
赵卫, 刘文生 牵引变流器网侧电流低次谐波抑制的研究
[J]. 机车电传动 , 2017 , 3 : 24 - 29
[本文引用: 1]
ZHAO Wei, LIU Wen-sheng Research on suppression of net-side low-order harmonics current in traction converter
[J]. Electric Drive for Locomotive , 2017 , 3 : 24 - 29
[本文引用: 1]
[18]
HOLTZ J Pulse width modulation: a survey
[J]. IEEE Transactions on Industrial Electronics , 1992 , 39 (5 ): 410 - 420
DOI:10.1109/41.161472
[本文引用: 1]
[19]
HOLMES D, LIPO T. Pulse width modulation for power converters: principle and practice [M]. New Jersey: Wiley-IEEE Press, 2003: 396–415.
[本文引用: 2]
[20]
韦克康, 郑琼林, 周明磊, 等 低开关频率下混合脉宽调制方法研究
[J]. 北京交通大学学报 , 2011 , 35 (5 ): 106 - 112
DOI:10.3969/j.issn.1673-0291.2011.05.020
WEI Ke-kang, ZHENG Qiong-lin, ZHOU Ming-lei, et al Study on a hybrid PWM method under low switching frequency
[J]. Journal of Beijing Jiaotong University , 2011 , 35 (5 ): 106 - 112
DOI:10.3969/j.issn.1673-0291.2011.05.020
[21]
王堃, 游小杰, 王琛琛, 等 低开关频率下SHEPWM和SVPWM同步调制策略比较研究
[J]. 电工技术学报 , 2015 , 30 (14 ): 333 - 341
DOI:10.3969/j.issn.1000-6753.2015.14.045
[本文引用: 1]
WANG Kun, YOU Xiao-jie, WANG Chen-chen, et al Research on the comparison of synchronized modulation of SHEPWM and SVPWM under low switching frequency
[J]. Transactions of China Electrotechnical Society , 2015 , 30 (14 ): 333 - 341
DOI:10.3969/j.issn.1000-6753.2015.14.045
[本文引用: 1]
1
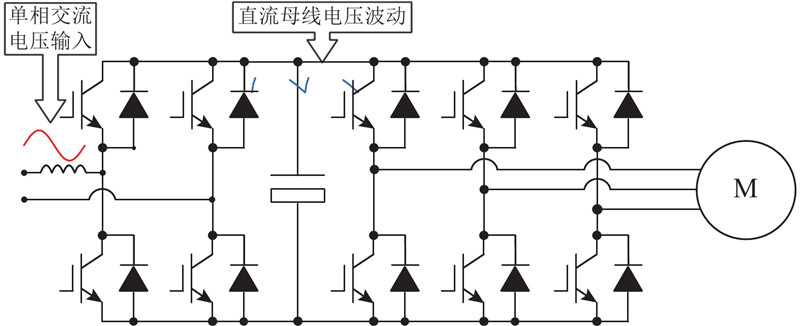
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
1
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
2
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
... [3 -5 ]),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
2
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
... [3 -5 ]),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
CRH系列动车组牵引变流器主电路分析
1
2017
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
CRH系列动车组牵引变流器主电路分析
1
2017
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
Instantaneous reactive power compensators comprising switching devices without energy storage components
1
1984
... 高速铁路交通在我国已经深入人们的生活,并仍处于蓬勃发展的阶段. 高速动车组牵引控制的性能优化也成为研究热点. 与其他电气化铁路系统相同,高铁动车组列车采用单相交流供电. 在牵引传动系统交-直-交的结构中,单相供电引起直流母线电压存在2倍电网频率的波动成分. 这一电压波动成分会引起牵引电机电流与转矩的波动,产生额外的损耗以及振动和噪音,应予以处理. 通常的做法是在直流母线上接入LC滤波模块(例如在CRH1与CRH3以及各自衍生车型中[1 -3 ] ),设置LC谐振频率与母线电压波动频率相等,从而消除波动成分;或不使用LC,采用容量较大的直流母线支撑电容结合较高的逆变器等效开关频率(例如在CRH2与CRH5以及各自衍生车型中[3 -5 ] ),以减小母线电压波动幅度及其带来的影响. 此外,Akagi等[6 ] 提出增加有源电力滤波模块消除波动. 以上做法都在列车上引入了额外的器件,不可避免增加了体积重量以及成本. ...
1
... 在大功率列车牵引中,逆变器开关频率通常限制在几百赫兹以控制开关损耗,在基波频率较高、每周期脉冲数较少时,容易产生高的电流谐波损耗. 离线优化的选择谐波消除脉宽调制(selected harmonics elimination pulse width modulation,SHEPWM)方法可以在一定的每周期脉冲数下尽可能消除低次谐波电压,从而降低总体谐波电流损耗. 在CRH5及其衍生车型,以及部分地铁牵引系统中[7 ] 采用了多种脉冲数组合的SHEPWM方法. 不过,由于开关频率较低,牵引系统电流控制闭环的带宽受到限制. ...
1
... 在大功率列车牵引中,逆变器开关频率通常限制在几百赫兹以控制开关损耗,在基波频率较高、每周期脉冲数较少时,容易产生高的电流谐波损耗. 离线优化的选择谐波消除脉宽调制(selected harmonics elimination pulse width modulation,SHEPWM)方法可以在一定的每周期脉冲数下尽可能消除低次谐波电压,从而降低总体谐波电流损耗. 在CRH5及其衍生车型,以及部分地铁牵引系统中[7 ] 采用了多种脉冲数组合的SHEPWM方法. 不过,由于开关频率较低,牵引系统电流控制闭环的带宽受到限制. ...
Fluctuating current control method for a PMSM along constant torque contours
1
2014
... 综上所述,在母线电压波动存在以及电流控制带宽较低的条件下,使用纯软件的控制补偿方法抑制母线电压波动引起的谐波电流及转矩波动,是理想的解决方案. Kim等[8 ] 提出利用电机自身储存的无功功率对母线电压波动进行补偿的方法,但此方法会使电机电流显著升高,效率降低,同时对电流控制闭环带宽也有很高要求,不适用于大功率牵引. Salam等[9 -13 ] 提出一系列前馈占空比补偿方法,根据母线电压波形直接调节调制占空比以补偿电压波动的影响. Gou等[14 -15 ] 提出前馈频率补偿方法,推出母线电压波动值与瞬时电压矢量频率的关系,从而根据母线电压波形调整输出矢量频率以抵消电压波动的影响. 以上方法均存在两方面困难:1)要直接得到下一执行周期内的母线电压波形,要求其波动分量相位与幅值都已知,这在实际运行中往往难以实现;2)对于SHEPWM方法,不存在直接的占空比,因此占空比补偿方法难以实施,并且SHEPWM的脉冲序列依据电压矢量相位输出,而频率补偿方法会引起电压矢量相位的抖动,可能导致脉冲输出次序出现混乱,方法难以实施. ...
1
... 综上所述,在母线电压波动存在以及电流控制带宽较低的条件下,使用纯软件的控制补偿方法抑制母线电压波动引起的谐波电流及转矩波动,是理想的解决方案. Kim等[8 ] 提出利用电机自身储存的无功功率对母线电压波动进行补偿的方法,但此方法会使电机电流显著升高,效率降低,同时对电流控制闭环带宽也有很高要求,不适用于大功率牵引. Salam等[9 -13 ] 提出一系列前馈占空比补偿方法,根据母线电压波形直接调节调制占空比以补偿电压波动的影响. Gou等[14 -15 ] 提出前馈频率补偿方法,推出母线电压波动值与瞬时电压矢量频率的关系,从而根据母线电压波形调整输出矢量频率以抵消电压波动的影响. 以上方法均存在两方面困难:1)要直接得到下一执行周期内的母线电压波形,要求其波动分量相位与幅值都已知,这在实际运行中往往难以实现;2)对于SHEPWM方法,不存在直接的占空比,因此占空比补偿方法难以实施,并且SHEPWM的脉冲序列依据电压矢量相位输出,而频率补偿方法会引起电压矢量相位的抖动,可能导致脉冲输出次序出现混乱,方法难以实施. ...
Vector -optimised harmonic elimination for single-phase pulse-width modulation inverters/converters
0
2007
A new technique to reject DC-link voltage ripple for inverters operating on programmed PWM waveforms
1
1992
... 综上所述,在母线电压波动存在以及电流控制带宽较低的条件下,使用纯软件的控制补偿方法抑制母线电压波动引起的谐波电流及转矩波动,是理想的解决方案. Kim等[8 ] 提出利用电机自身储存的无功功率对母线电压波动进行补偿的方法,但此方法会使电机电流显著升高,效率降低,同时对电流控制闭环带宽也有很高要求,不适用于大功率牵引. Salam等[9 -13 ] 提出一系列前馈占空比补偿方法,根据母线电压波形直接调节调制占空比以补偿电压波动的影响. Gou等[14 -15 ] 提出前馈频率补偿方法,推出母线电压波动值与瞬时电压矢量频率的关系,从而根据母线电压波形调整输出矢量频率以抵消电压波动的影响. 以上方法均存在两方面困难:1)要直接得到下一执行周期内的母线电压波形,要求其波动分量相位与幅值都已知,这在实际运行中往往难以实现;2)对于SHEPWM方法,不存在直接的占空比,因此占空比补偿方法难以实施,并且SHEPWM的脉冲序列依据电压矢量相位输出,而频率补偿方法会引起电压矢量相位的抖动,可能导致脉冲输出次序出现混乱,方法难以实施. ...
1
... 综上所述,在母线电压波动存在以及电流控制带宽较低的条件下,使用纯软件的控制补偿方法抑制母线电压波动引起的谐波电流及转矩波动,是理想的解决方案. Kim等[8 ] 提出利用电机自身储存的无功功率对母线电压波动进行补偿的方法,但此方法会使电机电流显著升高,效率降低,同时对电流控制闭环带宽也有很高要求,不适用于大功率牵引. Salam等[9 -13 ] 提出一系列前馈占空比补偿方法,根据母线电压波形直接调节调制占空比以补偿电压波动的影响. Gou等[14 -15 ] 提出前馈频率补偿方法,推出母线电压波动值与瞬时电压矢量频率的关系,从而根据母线电压波形调整输出矢量频率以抵消电压波动的影响. 以上方法均存在两方面困难:1)要直接得到下一执行周期内的母线电压波形,要求其波动分量相位与幅值都已知,这在实际运行中往往难以实现;2)对于SHEPWM方法,不存在直接的占空比,因此占空比补偿方法难以实施,并且SHEPWM的脉冲序列依据电压矢量相位输出,而频率补偿方法会引起电压矢量相位的抖动,可能导致脉冲输出次序出现混乱,方法难以实施. ...
1
... 综上所述,在母线电压波动存在以及电流控制带宽较低的条件下,使用纯软件的控制补偿方法抑制母线电压波动引起的谐波电流及转矩波动,是理想的解决方案. Kim等[8 ] 提出利用电机自身储存的无功功率对母线电压波动进行补偿的方法,但此方法会使电机电流显著升高,效率降低,同时对电流控制闭环带宽也有很高要求,不适用于大功率牵引. Salam等[9 -13 ] 提出一系列前馈占空比补偿方法,根据母线电压波形直接调节调制占空比以补偿电压波动的影响. Gou等[14 -15 ] 提出前馈频率补偿方法,推出母线电压波动值与瞬时电压矢量频率的关系,从而根据母线电压波形调整输出矢量频率以抵消电压波动的影响. 以上方法均存在两方面困难:1)要直接得到下一执行周期内的母线电压波形,要求其波动分量相位与幅值都已知,这在实际运行中往往难以实现;2)对于SHEPWM方法,不存在直接的占空比,因此占空比补偿方法难以实施,并且SHEPWM的脉冲序列依据电压矢量相位输出,而频率补偿方法会引起电压矢量相位的抖动,可能导致脉冲输出次序出现混乱,方法难以实施. ...
1
... 综上所述,在母线电压波动存在以及电流控制带宽较低的条件下,使用纯软件的控制补偿方法抑制母线电压波动引起的谐波电流及转矩波动,是理想的解决方案. Kim等[8 ] 提出利用电机自身储存的无功功率对母线电压波动进行补偿的方法,但此方法会使电机电流显著升高,效率降低,同时对电流控制闭环带宽也有很高要求,不适用于大功率牵引. Salam等[9 -13 ] 提出一系列前馈占空比补偿方法,根据母线电压波形直接调节调制占空比以补偿电压波动的影响. Gou等[14 -15 ] 提出前馈频率补偿方法,推出母线电压波动值与瞬时电压矢量频率的关系,从而根据母线电压波形调整输出矢量频率以抵消电压波动的影响. 以上方法均存在两方面困难:1)要直接得到下一执行周期内的母线电压波形,要求其波动分量相位与幅值都已知,这在实际运行中往往难以实现;2)对于SHEPWM方法,不存在直接的占空比,因此占空比补偿方法难以实施,并且SHEPWM的脉冲序列依据电压矢量相位输出,而频率补偿方法会引起电压矢量相位的抖动,可能导致脉冲输出次序出现混乱,方法难以实施. ...
Repetitive compensation of fluctuating DC link voltage for railway traction drives
5
2011
... 对于第1方面的困难,Ouyang等[16 ] 在特殊次数谐振控制器原理[17 ] 基础上提出重复预测器,利用直流母线电压波动分量的周期性,对将来的母线电压波形进行预测. 本研究将重复预测器进行扩展,形成滑动预测窗口,从而能在任意时刻得到从该时刻开始的将来一段时间内的直流母线电压预测波形. 对于第2方面困难,本研究提出针对SHEPWM的补偿方法. 根据不同的脉冲数的角度分布特点,划分若干个相位固定的处理区间;根据区间编号确定区间内的各相开关形式,并结合预测的区间内直流母线电压波形计算出区间结束时累计的磁链误差;再次结合区间内预测的直流母线电压波形,调整各相开关时刻以补偿前一步中推测出的磁链误差. 实验结果证明,提出的补偿方法在各种脉冲模式SHEPWM下都能够显著降低直流母线电压波动所引起的电机电流与转矩波动. ...
... 为了提前获得之后执行周期内的母线电压,Ouyang等[16 ] 提出重复预测器,利用母线电压波动分量的周期性预测将来时刻的母线电压,但只给出预测平均值用于直接计算占空比,需要对其进行改进才能用于不同的调制模式. ...
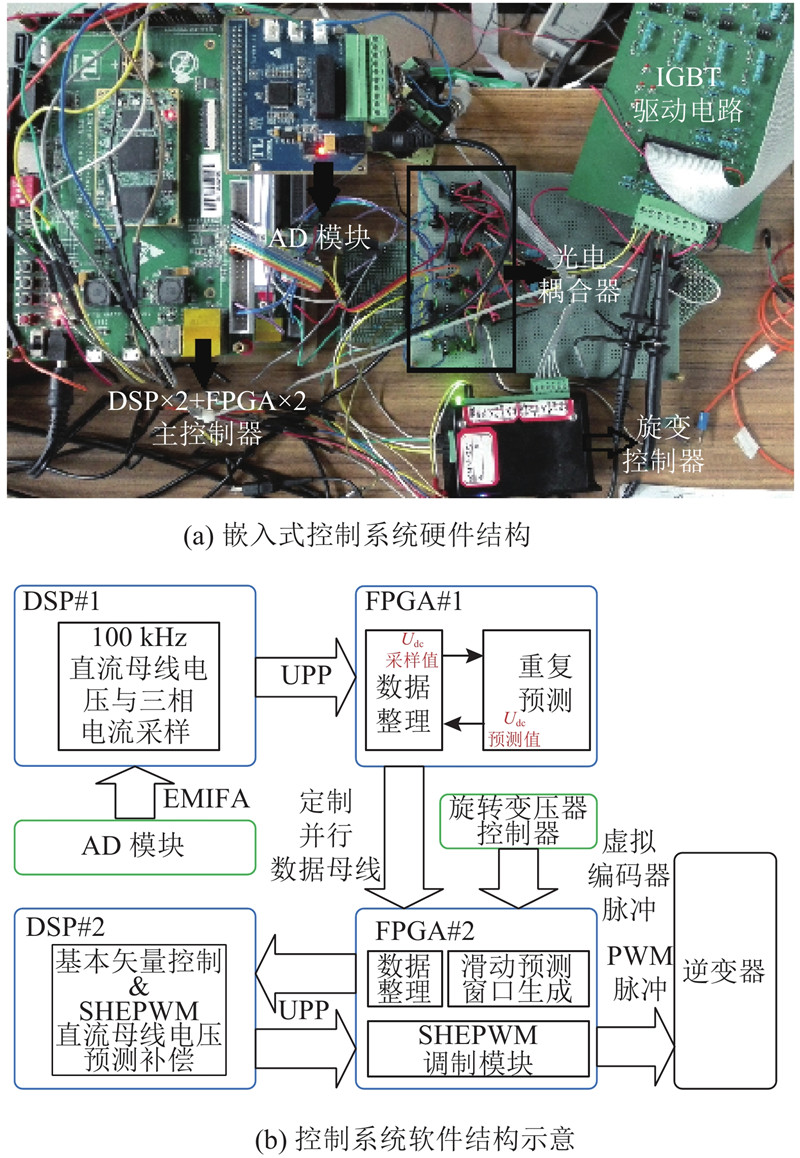
... 文献[16 ]中的重复预测器采样频率为10 kHz,而在低开关频率SHEPWM调制中,以1APQ模式在输出基波频率为100 Hz时的情况为例,此时处理区间对应的采样频率为600 Hz,则每个处理区间内有效的母线电压预测点数目约为16个,不足以提供足够的母线电压预测波形信息. 因此,将采样频率提高至100 kHz,并相应调整参数,这样以上情况中每个处理周期内的预测点数目将提升至167个,可以准确地反映预测母线电压波形. 补偿算法需要提前1个处理区间完成,以使计算结果可以在对应区间到来时刻加载执行. 因此,需要预测未来至少2个处理区间内的波形. 根据可能的最长处理区间长度决定重复预测器的最大时间提前量. ...
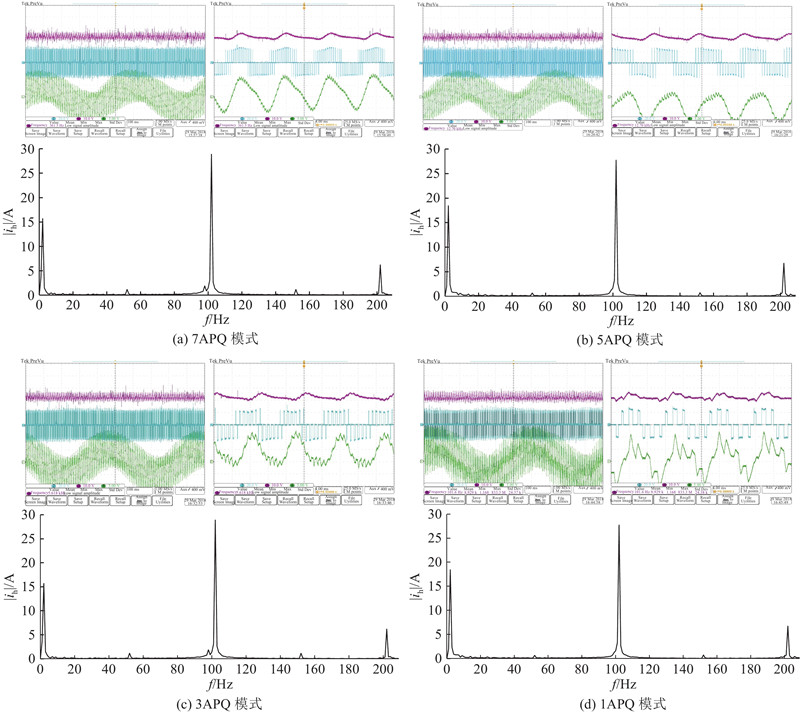
... 为了检测提出的补偿方法的高效性,采用只使用文献[16 ]的预测平均值进行补偿的方案(记为直接平均法)进行实验,并对比结果. 需要说明的是,对于典型的SHEPWM,由于其不存在显式的载波周期概念,文献[16 ]中的预测平均值原本不能直接用于SHEPWM,这里为了实现对比,保留了之前提出的处理区间,将其近似等效为载波周期,然后通过利用重复预测器计算出等效载波周期内的平均母线电压,并据此得到该载波周期内的调制深度,最后查表得到开关角度. 实验结果如图14 所示. 在7APQ、5APQ、3APQ、1APQ模式下,4 Hz谐波电流幅值分别约为7.3、5.9、12.5、21.3 A; 202 Hz谐波电流幅值分别约为2.9、2.8、4.9、7.9 A. 可以看出,在开关角度数较多的模式下,直接平均法的谐波抑制性能接近于本研究所提出的补偿方法,而当开关角度数较低时直接平均法的性能则明显降低. 这是因为在开关角度数较多时,一方面角度随调制深度的变化更接近于线性,另一方面处理区间多、每个区间内的母线电压变化小且平滑,这样使用平均值可以较好地进行补偿;而在开关角度数较低时,角度随调制深度的变化呈非线性增长,且处理区间少、每一区间长,其电压平均值已不能反映区间内的电压真实变化情况,使得用平均值进行补偿误差增大. 整体而言,本研究提出的补偿方法相比直接使用预测平均母线电压值进行补偿的方法始终具有优势. ...
... ]的预测平均值进行补偿的方案(记为直接平均法)进行实验,并对比结果. 需要说明的是,对于典型的SHEPWM,由于其不存在显式的载波周期概念,文献[16 ]中的预测平均值原本不能直接用于SHEPWM,这里为了实现对比,保留了之前提出的处理区间,将其近似等效为载波周期,然后通过利用重复预测器计算出等效载波周期内的平均母线电压,并据此得到该载波周期内的调制深度,最后查表得到开关角度. 实验结果如图14 所示. 在7APQ、5APQ、3APQ、1APQ模式下,4 Hz谐波电流幅值分别约为7.3、5.9、12.5、21.3 A; 202 Hz谐波电流幅值分别约为2.9、2.8、4.9、7.9 A. 可以看出,在开关角度数较多的模式下,直接平均法的谐波抑制性能接近于本研究所提出的补偿方法,而当开关角度数较低时直接平均法的性能则明显降低. 这是因为在开关角度数较多时,一方面角度随调制深度的变化更接近于线性,另一方面处理区间多、每个区间内的母线电压变化小且平滑,这样使用平均值可以较好地进行补偿;而在开关角度数较低时,角度随调制深度的变化呈非线性增长,且处理区间少、每一区间长,其电压平均值已不能反映区间内的电压真实变化情况,使得用平均值进行补偿误差增大. 整体而言,本研究提出的补偿方法相比直接使用预测平均母线电压值进行补偿的方法始终具有优势. ...
牵引变流器网侧电流低次谐波抑制的研究
1
2017
... 对于第1方面的困难,Ouyang等[16 ] 在特殊次数谐振控制器原理[17 ] 基础上提出重复预测器,利用直流母线电压波动分量的周期性,对将来的母线电压波形进行预测. 本研究将重复预测器进行扩展,形成滑动预测窗口,从而能在任意时刻得到从该时刻开始的将来一段时间内的直流母线电压预测波形. 对于第2方面困难,本研究提出针对SHEPWM的补偿方法. 根据不同的脉冲数的角度分布特点,划分若干个相位固定的处理区间;根据区间编号确定区间内的各相开关形式,并结合预测的区间内直流母线电压波形计算出区间结束时累计的磁链误差;再次结合区间内预测的直流母线电压波形,调整各相开关时刻以补偿前一步中推测出的磁链误差. 实验结果证明,提出的补偿方法在各种脉冲模式SHEPWM下都能够显著降低直流母线电压波动所引起的电机电流与转矩波动. ...
牵引变流器网侧电流低次谐波抑制的研究
1
2017
... 对于第1方面的困难,Ouyang等[16 ] 在特殊次数谐振控制器原理[17 ] 基础上提出重复预测器,利用直流母线电压波动分量的周期性,对将来的母线电压波形进行预测. 本研究将重复预测器进行扩展,形成滑动预测窗口,从而能在任意时刻得到从该时刻开始的将来一段时间内的直流母线电压预测波形. 对于第2方面困难,本研究提出针对SHEPWM的补偿方法. 根据不同的脉冲数的角度分布特点,划分若干个相位固定的处理区间;根据区间编号确定区间内的各相开关形式,并结合预测的区间内直流母线电压波形计算出区间结束时累计的磁链误差;再次结合区间内预测的直流母线电压波形,调整各相开关时刻以补偿前一步中推测出的磁链误差. 实验结果证明,提出的补偿方法在各种脉冲模式SHEPWM下都能够显著降低直流母线电压波动所引起的电机电流与转矩波动. ...
Pulse width modulation: a survey
1
1992
... 式中: ${u_x^*(t)}$ $x = a,b,c$ ${U_{{\rm{dc}}}}$ ${k_i}$ $i$ ${\omega _1}$ ${\varphi _{xi}}$ $x$ $i$ ${\rm{MI}}$ 18 ]定义的调制深度. 由于星形接法以及通常逆变器输出相电压波形满足1/2周期和1/4周期对称,输出电压高次谐波只含有 $\left( {6k \pm 1} \right)(k = 1,2,3,\cdots)$
2
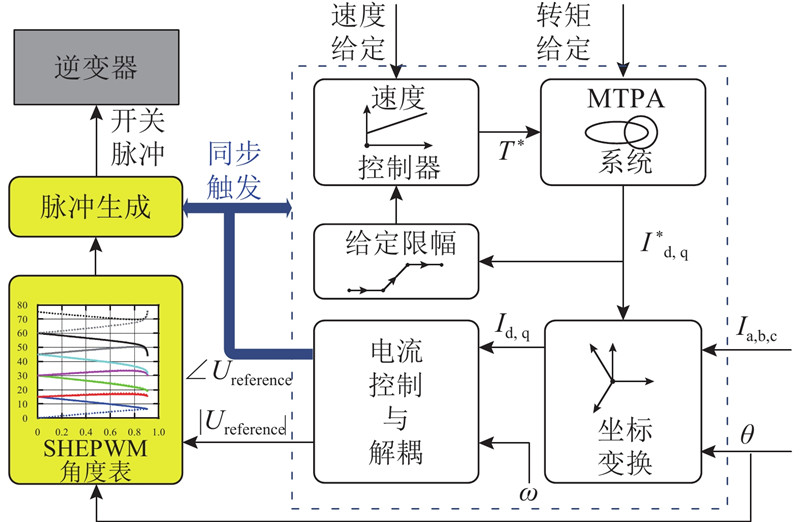
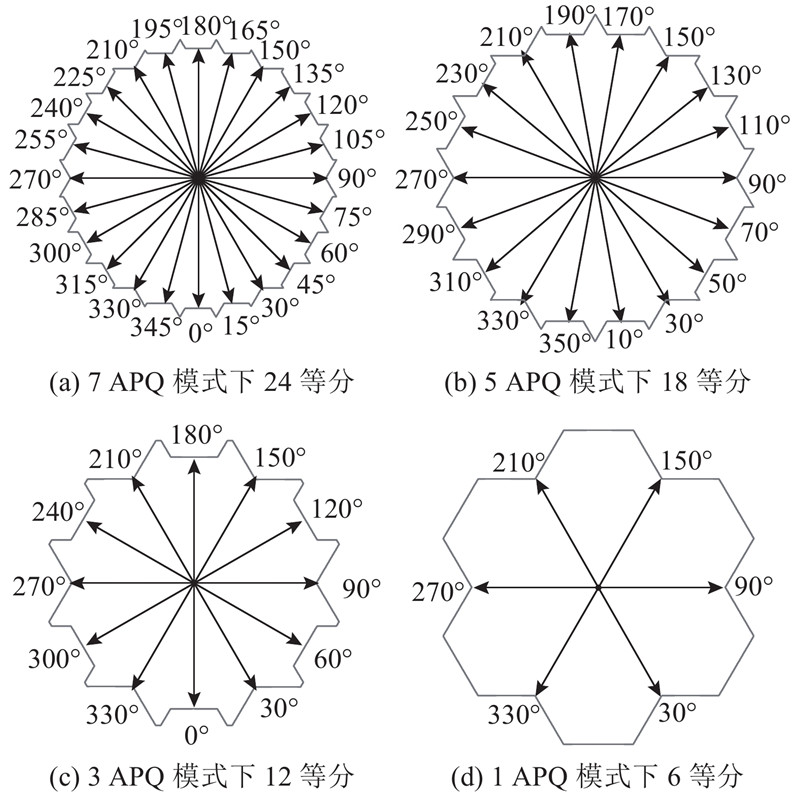
... 牵引控制系统整体结构如图4 所示. 图中,T * 为转矩给定,I d,q 、I * d,q 分别为直轴、交轴电流采样值和给定值,I a,b,c 为相电流采样值, $ \angle$ U reference 、|U reference |分别为参考电压相位和幅值. SHEPWM采用典型的波形1/2周期对称和1/4周期对称[19 ] ,共选取4种模式,每1/4周期内关键角度个数分别为7、5、3、1(分别记为7APQ、5APQ、3APQ、1APQ模式),对应每基波周期内15、11、7、3个脉冲. 随着输出频率的升高依次减小脉冲数,从而在限制开关频率的条件下尽可能减少谐波. 不同模式下开关角度的计算方法及其随调制深度的变化在相关文献[19 -21 ] 中已有叙述. 通过观察可以发现,若将4种模式角度范围依次按照15°、20°、30°、60°分别划分为4、3、2、1个区间,则在任意调制深度下,每区间内的角度个数将是确定的. 而每个区间位置则与电压矢量的相位直接相关. 因此,在4种模式下分别按照该4种不同的角度范围将电压矢量角度每一周分为4种对应的等分数目,如图5 所示. 这样,每一区间内各相的开关动作对应的角度编号及次序将是唯一确定的,只是开关时刻在区间内的位置随着调制深度不同而变化. 并且还可以判断,在每一区间内三相中有且只有两相有开关动作、另一相保持开通或关断. 以上特性都将为之后补偿过程的实施带来便利. ...
... [19 -21 ]中已有叙述. 通过观察可以发现,若将4种模式角度范围依次按照15°、20°、30°、60°分别划分为4、3、2、1个区间,则在任意调制深度下,每区间内的角度个数将是确定的. 而每个区间位置则与电压矢量的相位直接相关. 因此,在4种模式下分别按照该4种不同的角度范围将电压矢量角度每一周分为4种对应的等分数目,如图5 所示. 这样,每一区间内各相的开关动作对应的角度编号及次序将是唯一确定的,只是开关时刻在区间内的位置随着调制深度不同而变化. 并且还可以判断,在每一区间内三相中有且只有两相有开关动作、另一相保持开通或关断. 以上特性都将为之后补偿过程的实施带来便利. ...
低开关频率下SHEPWM和SVPWM同步调制策略比较研究
1
2015
... 牵引控制系统整体结构如图4 所示. 图中,T * 为转矩给定,I d,q 、I * d,q 分别为直轴、交轴电流采样值和给定值,I a,b,c 为相电流采样值, $ \angle$ U reference 、|U reference |分别为参考电压相位和幅值. SHEPWM采用典型的波形1/2周期对称和1/4周期对称[19 ] ,共选取4种模式,每1/4周期内关键角度个数分别为7、5、3、1(分别记为7APQ、5APQ、3APQ、1APQ模式),对应每基波周期内15、11、7、3个脉冲. 随着输出频率的升高依次减小脉冲数,从而在限制开关频率的条件下尽可能减少谐波. 不同模式下开关角度的计算方法及其随调制深度的变化在相关文献[19 -21 ] 中已有叙述. 通过观察可以发现,若将4种模式角度范围依次按照15°、20°、30°、60°分别划分为4、3、2、1个区间,则在任意调制深度下,每区间内的角度个数将是确定的. 而每个区间位置则与电压矢量的相位直接相关. 因此,在4种模式下分别按照该4种不同的角度范围将电压矢量角度每一周分为4种对应的等分数目,如图5 所示. 这样,每一区间内各相的开关动作对应的角度编号及次序将是唯一确定的,只是开关时刻在区间内的位置随着调制深度不同而变化. 并且还可以判断,在每一区间内三相中有且只有两相有开关动作、另一相保持开通或关断. 以上特性都将为之后补偿过程的实施带来便利. ...
低开关频率下SHEPWM和SVPWM同步调制策略比较研究
1
2015
... 牵引控制系统整体结构如图4 所示. 图中,T * 为转矩给定,I d,q 、I * d,q 分别为直轴、交轴电流采样值和给定值,I a,b,c 为相电流采样值, $ \angle$ U reference 、|U reference |分别为参考电压相位和幅值. SHEPWM采用典型的波形1/2周期对称和1/4周期对称[19 ] ,共选取4种模式,每1/4周期内关键角度个数分别为7、5、3、1(分别记为7APQ、5APQ、3APQ、1APQ模式),对应每基波周期内15、11、7、3个脉冲. 随着输出频率的升高依次减小脉冲数,从而在限制开关频率的条件下尽可能减少谐波. 不同模式下开关角度的计算方法及其随调制深度的变化在相关文献[19 -21 ] 中已有叙述. 通过观察可以发现,若将4种模式角度范围依次按照15°、20°、30°、60°分别划分为4、3、2、1个区间,则在任意调制深度下,每区间内的角度个数将是确定的. 而每个区间位置则与电压矢量的相位直接相关. 因此,在4种模式下分别按照该4种不同的角度范围将电压矢量角度每一周分为4种对应的等分数目,如图5 所示. 这样,每一区间内各相的开关动作对应的角度编号及次序将是唯一确定的,只是开关时刻在区间内的位置随着调制深度不同而变化. 并且还可以判断,在每一区间内三相中有且只有两相有开关动作、另一相保持开通或关断. 以上特性都将为之后补偿过程的实施带来便利. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}