| Civil Engineering, Transportation Engineering |
|


|
|
|
| Intelligent vehicle trajectory tracking control based on linear matrix inequality |
Hai-dong WU( ),Zhen-li SI ),Zhen-li SI |
| State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China |
|
|
|
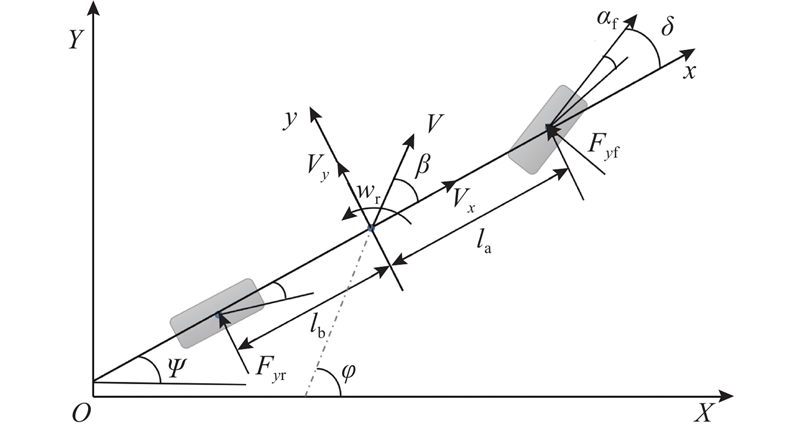
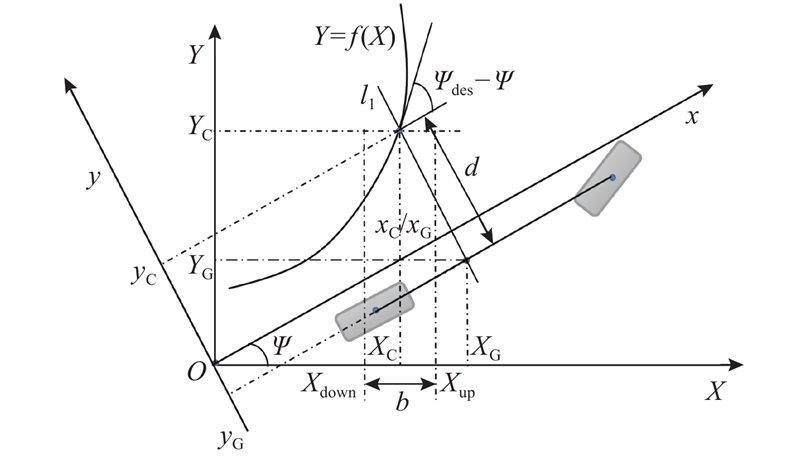
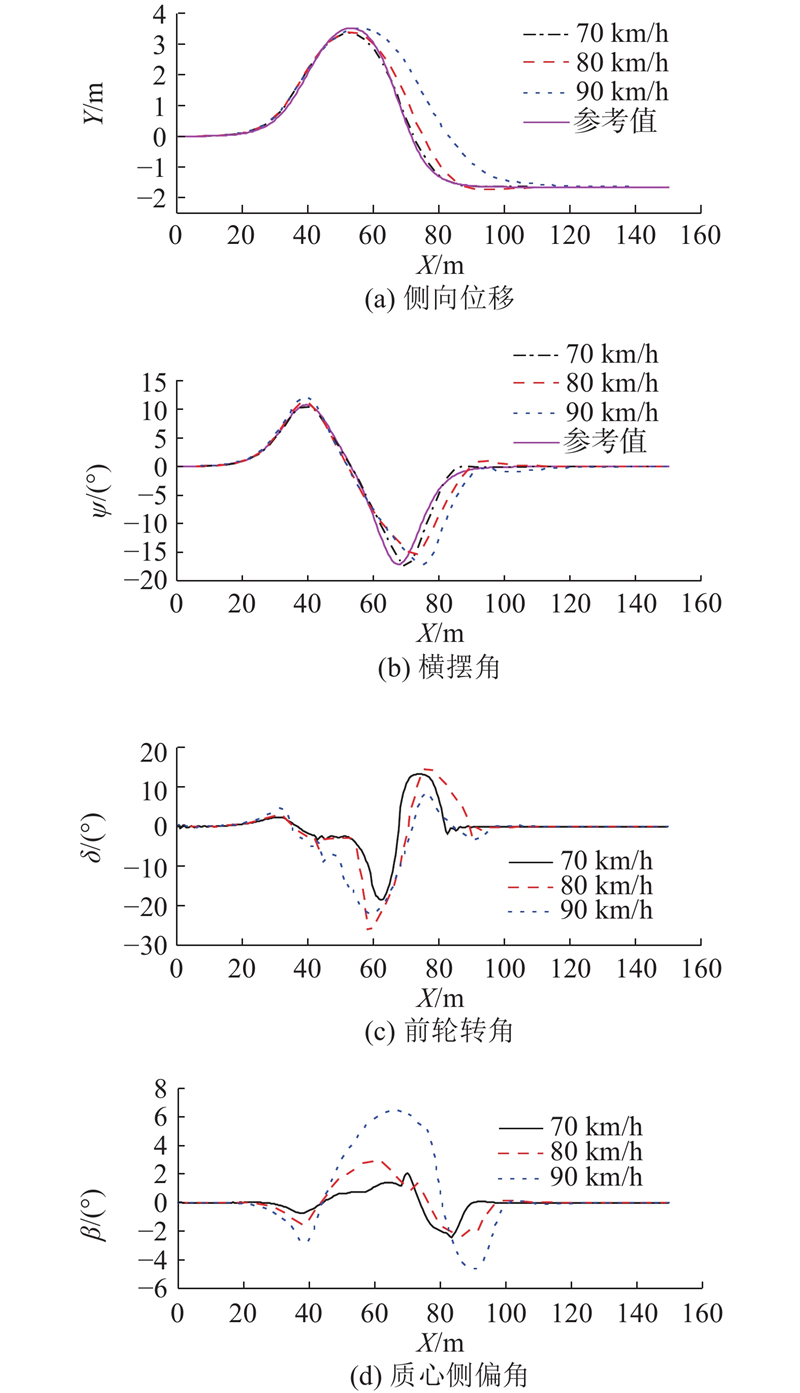
Abstract The traditional intelligent vehicle trajectory tracking controller based on precise mathematical model had the problems such as low tracking accuracy, weak robustness and difficult to adapt to the complex and changeable driving environment. An intelligent vehicle trajectory tracking control method was proposed based on linear matrix inequality (LMI) which had the advantages of easy to solve and strong anti-interference ability in order to solve these problems. The coordinate of vehicle lateral dynamic state space model was transformed to obtain the vehicle lateral dynamic state space model based on tracking error, and the vehicle lateral dynamics poly-topic model was got by using saturated linear tires. The LMI feedback controller was designed and the feedforward control amount was introduced in the controller to eliminate the lateral position steady error. The co-simulation of Carsim and Matlab/Simulink showed that the controller had high tracking accuracy and strong robustness to vehicle speed and road adhesion coefficient with ensuring vehicle stability. Results showed that the designed controller was better in trajectory tracking accuracy compared with the model predictive control (MPC) controller and preview driver model (PDM) controller.
|
|
Received: 15 June 2019
Published: 05 January 2020
|
|
|
基于线性矩阵不等式的智能车轨迹跟踪控制
针对传统的基于精确数学模型的智能车轨迹跟踪控制器跟踪精度低,鲁棒性弱,很难适应复杂多变的驾驶环境等问题,结合线性矩阵不等式(LMI)鲁棒控制具有易于求解、抗干扰能力强等优点,提出基于LMI的智能车轨迹跟踪控制方法. 将车辆侧向动力学状态空间模型进行坐标变换,得到基于跟踪误差的车辆侧向动力学状态空间模型,采用饱和线性轮胎得到车辆侧向动力学多胞型模型;设计LMI反馈控制器,在控制器中引入前馈控制量,以消除侧向位置稳态误差. Carsim和Matlab/Simulink的联合仿真表明,该控制器在保证车辆稳定性的基础上具有较高的跟踪精度,对车速和路面附着系数具有较强的鲁棒性. 与模型预测控制器(MPC)和预瞄驾驶员模型(PDM)控制器进行对比,结果表明,设计的该控制器轨迹跟踪精度更优.
关键词:
轨迹跟踪,
线性矩阵不等式(LMI),
饱和线性轮胎,
多胞型模型,
联合仿真
|
|
| [1] |
LI A J, ZHAO W Z, WANG X B, et al ACT-R cognitive model based trajectory planning method study for electric vehicle's active obstacle avoidance system[J]. Energies, 2018, 11 (1): 1- 21
|
|
|
| [2] |
李骏, 邱少波, 李红建, 等 智慧城市的智能汽车[J]. 中国科学(信息科学), 2016, 46 (5): 551- 559
LI Jun, QIU Shao-bo, LI Hong-jian, et al Smart vehicle for smart city[J]. Scientia Sinica (Informationis), 2016, 46 (5): 551- 559
|
|
|
| [3] |
GHARAVI H, PRASAD K V, IOANNOU P Scanning advanced automobile technology[J]. Proceedings of the IEEE, 2007, 95 (2): 328- 333
doi: 10.1109/JPROC.2006.888380
|
|
|
| [4] |
MACADAM C C Application of an optimal preview control for simulation of closed-loop automobile driving[J]. IEEE Transactions on Systems, Man and Cybernetics, 1981, 11 (6): 393- 399
doi: 10.1109/TSMC.1981.4308705
|
|
|
| [5] |
GUO K, GUAN H Modelling of driver/vehicle directional control system[J]. Vehicle System Dynamics, 1993, 22 (3/4): 141- 184
|
|
|
| [6] |
姜立标, 吴中伟 基于趋近律滑模控制的智能车辆轨迹跟踪研究[J]. 农业机械学报, 2018, 49 (3): 381- 386
JIANG Li-biao, WU Zhong-wei Sliding mode control for intelligent vehicle trajectory tracking based on reaching law[J]. Transactions of the Chinese Society of Agricultural Machinery, 2018, 49 (3): 381- 386
doi: 10.6041/j.issn.1000-1298.2018.03.048
|
|
|
| [7] |
SOUDBAKHSH D, ESKANDARIAN A Comparison of linear and nonlinear controllers for active steering of vehicles in evasive manoeuvres[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2012, 226 (12): 215- 232
|
|
|
| [8] |
李兵. 基于联合仿真的智能车辆路径跟踪控制研究[D]. 大连: 大连理工大学, 2014.
LI Bing. Research of intelligent vehicle trajectory tracking control based on collaborative simulation [D]. Dalian: Dalian University of Technology, 2014.
|
|
|
| [9] |
龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014: 22-133.
|
|
|
| [10] |
FALCONE P, BORRELLI F, ASGARI J, et al Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15 (3): 566- 580
doi: 10.1109/TCST.2007.894653
|
|
|
| [11] |
孙银健. 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京: 北京理工大学, 2015.
SUN Yin-jian. Research on model predictive control-based trajectory tracking algorithm for unmanned vehicles [D]. Beijing: Beijing Institute of Technology, 2015.
|
|
|
| [12] |
VELHAL S, THOMAS S Improved LTVMPC design for steering control of autonomous vehicle[J]. Journal of Physics: Conference Series, 2017, 783 (1): 012028
|
|
|
| [13] |
WANG X, JIBIN H U, JUN N I. MPC-based trajectory tracking via active front steering and external yaw moment [C] // 4th International Conference on Vehicle, Mechanical and Electrical Engineering. Taiyuan: [s.n.] 2017.
|
|
|
| [14] |
WANG P W, GAO S, LI L Automatic steering control strategy for unmanned vehicles based on robust backstepping sliding mode control theory[J]. IEEE Access, 2019, 7: 64984- 64992
doi: 10.1109/ACCESS.2019.2917507
|
|
|
| [15] |
CALZOLARI D, SCHURMANN B, ALTHOFF M. Comparison of trajectory tracking controllers for autonomous vehicles [C] // 2017 IEEE 20th International Conference on Intelligent Transportation Systems. Yokohama: IEEE, 2017.
|
|
|
| [16] |
GUO J H, LUO Y G, LI K Q Robust gain-scheduling automatic steering control of unmanned ground vehicles under velocity-varying motion[J]. Vehicle System Dynamics, 2019, 57 (4): 595- 616
doi: 10.1080/00423114.2018.1475677
|
|
|
| [17] |
XIA Y Q, PU F, LI S F, et al Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (5): 3091- 3099
doi: 10.1109/TIE.2016.2531021
|
|
|
| [18] |
吴艳, 王丽芳, 李芳 基于滑模自抗扰的智能车路径跟踪控制[J]. 控制与决策, 2019, 34 (10): 2150- 2156
WU Yan, WANG Li-fang, LI Fang Intelligent vehicle path following control based on sliding mode active disturbance rejection control[J]. Control and Decision, 2019, 34 (10): 2150- 2156
|
|
|
| [19] |
RAJAMANI R. Vehicle dynamics and control [M]. Berlin: Springer, 2011: 27-54.
|
|
|
| [20] |
ZHANG D Z, LI K Q, WANG J Q A curving ACC system with coordination control of longitudinal car-following and lateral stability[J]. Vehicle System Dynamics, 2012, 50 (7): 1085- 1102
doi: 10.1080/00423114.2012.656654
|
|
|
| [21] |
刘豹, 唐万生. 现代控制理论[M]. 北京: 机械工业出版社, 2006: 82-97.
|
|
|
| [22] |
APKARIAN P, GAHINET P, BECKER G Self-scheduled H-infinity control of linear parameter-varying systems: a design example[J]. Automatica, 1995, 31 (9): 1251- 1261
doi: 10.1016/0005-1098(95)00038-X
|
|
|
| [23] |
KOTHARE M V, MORARI M, BALAKRISHNAN V Robust constrained model predictive control using linear matrix inequalities[J]. Automatica, 1996, 32 (10): 1361- 1379
doi: 10.1016/0005-1098(96)00063-5
|
|
|
| [24] |
张晨晨, 夏群生, 何乐 质心侧偏角对车辆稳定性影响的研究[J]. 汽车工程, 2011, (4): 277- 282
ZHANG Chen-chen, XIA Qun-sheng, HE Le A study on the influence of sideslip angle at mass center on vehicle stability[J]. Automotive Engineering, 2011, (4): 277- 282
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|