| Automation Technology, Computer Technology |
|


|
|
|
| Knee-joint exoskeleton control based on data-driven approach |
Yan ZHANG( ),Jian-zhou WANG,Wei LI,Jie WANG*(),Ling-ling CHEN,Peng YANG ),Jian-zhou WANG,Wei LI,Jie WANG*(),Ling-ling CHEN,Peng YANG |
| School of Artificial Intelligence, Hebei University of Technology, Tianjin 300131, China |
|
|
|
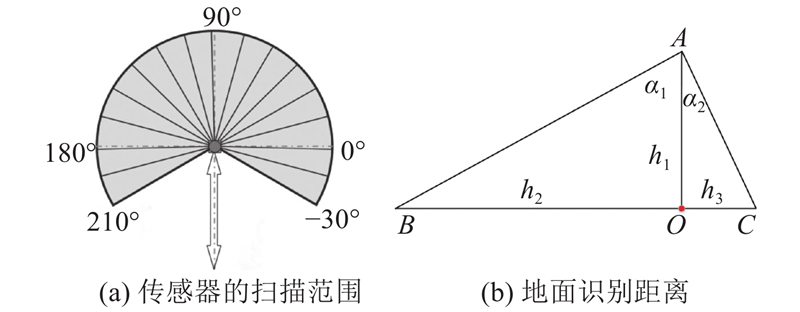
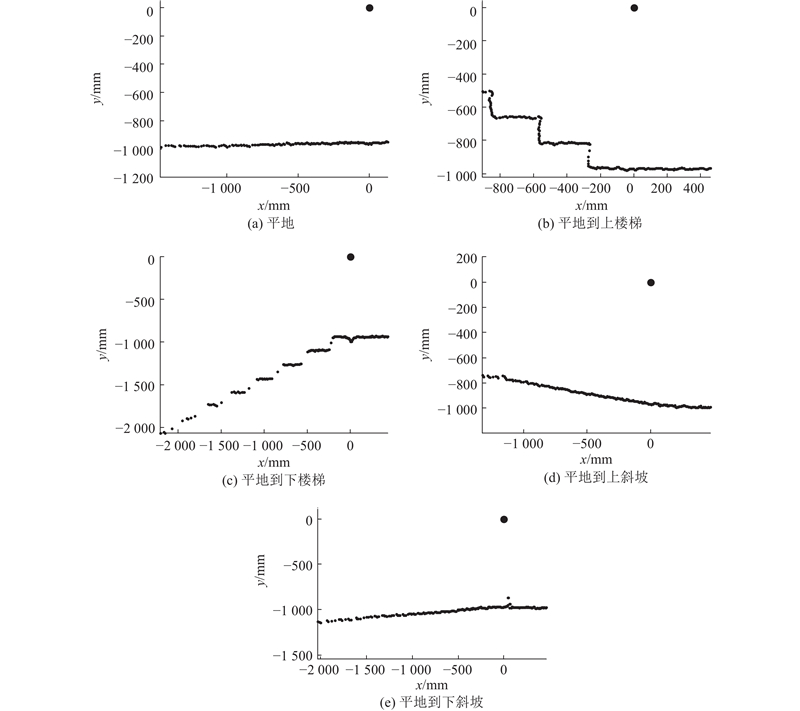
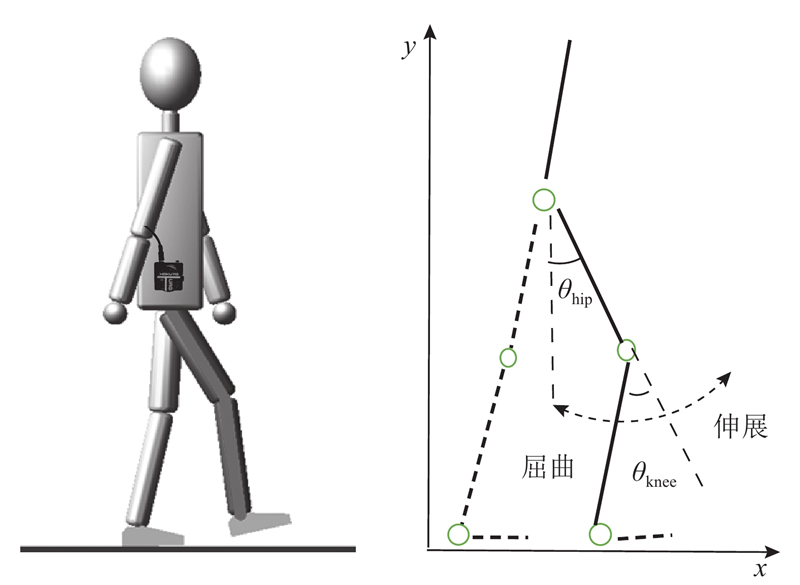
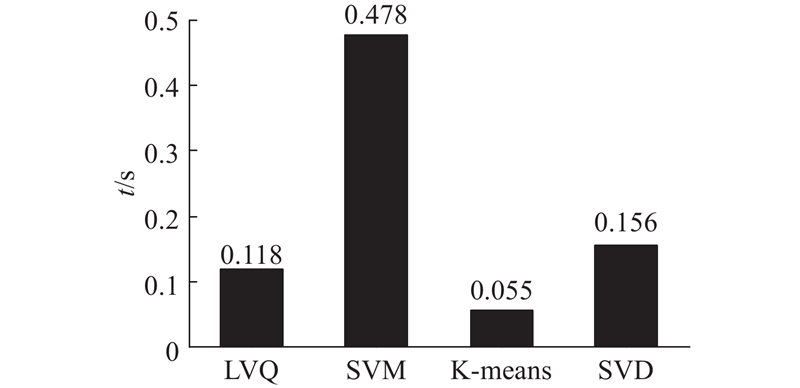
Abstract The two-dimensional laser rangefinder was used to collect terrain data for online identification in order to identify human movement intentions and coordinate human-exoskeleton motion. The method of learning vector quantization (LVQ) was used based on the distance features between different terrains in order to achieve fast and accurate terrain classification. A model-free adaptive control method based on data drive was designed, and the dynamic linearization model was established based on the input and output data of knee joint angle, which avoided the complexity and error of human-exoskeleton modeling. A human-exoskeleton model was established and the prior torque of the knee joint was obtained through the walking simulation. The prior torque was introduced to improve the accuracy of the controller. The ADAMS-MATLAB co-simulation platform was constructed, and the flat road condition was selected for experiment. The experimental results show that the designed strategy enables the knee-joint exoskeleton to track the trajectory of angle well and has a good performance on walking assistance.
|
|
Received: 23 August 2018
Published: 30 September 2019
|
|
|
|
Corresponding Authors:
Jie WANG
E-mail: yzhangz@163.com;wangjie@hebut.edu.cn
|
基于数据驱动的膝关节外骨骼控制
为了识别人体运动意图协调人机运动,采用二维激光测距仪采集地形数据进行在线识别,使用学习向量量化(LVQ)的方法,基于不同地形间的距离特征实现快速、准确的地形分类. 设计基于数据驱动的无模型自适应控制方法,基于膝关节角度的输入输出数据建立动态线性化模型,避免了人机外骨骼建模的复杂性和建模误差. 建立人机外骨骼模型,通过仿真得到正常行走时膝关节的先验力矩,引入先验力矩提高控制器的准确性. 搭建ADAMS和MATLAB联合仿真平台,选取平地路况进行实验. 实验结果表明,所设计的控制方法使得外骨骼膝关节对目标角度有良好的跟踪,对人体行走有较好的助行效果.
关键词:
外骨骼,
地形识别,
数据驱动,
无模型自适应控制,
动力学仿真
|
|
| [1] |
KAZEROONI H, STEGER R The Berkeley lower extremity exoskeleton[J]. Journal of Dynamic Systems, Measurement and Control, 2006, 128 (1): 14- 25
doi: 10.1115/1.2168164
|
|
|
| [2] |
WALSH C J, ENDO K, HERR H A quasi-passive leg exoskeleton for load-carrying augmentation[J]. International Journal of Humanoid Robotics, 2007, 4 (3): 487- 506
doi: 10.1142/S0219843607001126
|
|
|
| [3] |
TSUKAHARA A, HASEGAWA Y, EGUCHI K, et al Restoration of gait for spinal cord injury patients using HAL with intention estimator for preferable swing speed[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23 (2): 308- 318
doi: 10.1109/TNSRE.2014.2364618
|
|
|
| [4] |
杨巍, 张秀峰, 杨灿军, 等 基于人机5杆模型的下肢外骨骼系统设计[J]. 浙江大学学报: 工学版, 2014, 48 (3): 430- 435
YANG Wei, ZHANG Xiu-feng, YANG Can-jun, et al Design of a lower extremity exoskeleton based on 5-bar human machine model[J]. Journal of Zhejiang University: Engineering Science, 2014, 48 (3): 430- 435
|
|
|
| [5] |
刘磊, 杨鹏, 刘作军 基于多源信息和广义回归神经网络的下肢运动模式识别[J]. 机器人, 2015, 37 (3): 310- 317
LIU Lei, YANG Peng, LIU Zuo-jun Lower limb locomotion modes recognition based on multiple-source information and general regression neural network[J]. Robot, 2015, 37 (3): 310- 317
|
|
|
| [6] |
KRAUSZ N E, LENZI T, HARGROVE L J Depth sensing for improved control of lower limb prostheses[J]. IEEE Transactions on Biomedical Engineering, 2015, 62 (11): 2576- 2587
doi: 10.1109/TBME.2015.2448457
|
|
|
| [7] |
路永乐, 张欣, 龚爽, 等 基于MEMS惯性传感器的人体多运动模式识别[J]. 中国惯性技术学报, 2016, 24 (5): 589- 594
LU Yong-le, ZHANG Xin, GONG Shuang, et al Recognition of multiple human motion patterns based on MEMS inertial sensors[J]. Journal of Chinese Inertial Technology, 2016, 24 (5): 589- 594
|
|
|
| [8] |
张燕, 许京, 陈玲玲, 等 基于激光距离传感器的路况识别系统的设计[J]. 激光与红外, 2016, 46 (3): 265- 270
ZHANG Yan, XU Jing, CHEN Ling-ling, et al Design of terrain recognition system based on laser distance sensor[J]. Laser and Infrared, 2016, 46 (3): 265- 270
doi: 10.3969/j.issn.1001-5078.2016.03.004
|
|
|
| [9] |
肖熙, 周路 基于k均值和基于归一化类内方差的语音识别自适应聚类特征提取算法法[J]. 清华大学学报: 自然科学版, 2017, 57 (8): 857- 861
XIAO Xi, ZHOU Lu Speech recognition adaptive clustering feature extraction algorithms based on the k-means algorithm and the normalized intra-class variance[J]. Journal of Tsinghua University: Science and Technology, 2017, 57 (8): 857- 861
|
|
|
| [10] |
PRATT J E, KRUPP B T, MORSE C J, et al. The RoboKnee: an exoskeleton for enhancing strength and endurance during walking [C]//IEEE International Conference on Robotics and Automation. New Orleans: IEEE, 2004: 2430-3435.
|
|
|
| [11] |
RIFAI H, MOHAMMED S, DJOUANI K, et al Toward lower limbs functional rehabilitation through a knee-joint exoskeleton[J]. IEEE Transactions on Control Systems Technology, 2017, 25 (2): 712- 719
doi: 10.1109/TCST.2016.2565385
|
|
|
| [12] |
CHEN X, ZENG Y, YIN Y H Improving the transparency of an exoskeleton knee joint based on the understanding of motor intent using energy kernel method of EMG[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25 (6): 577- 588
doi: 10.1109/TNSRE.2016.2582321
|
|
|
| [13] |
韩亚丽, 许有熊, 高海涛, 等 基于导纳控制的膝关节外骨骼摆动控制研究[J]. 自动化学报, 2016, 42 (12): 1944- 1950
HAN Ya-li, XU You-xiong, GAO Hai-tao, et al Knee joint exoskeleton swing control with admittance control[J]. Acta Automatica A Sinica, 2016, 42 (12): 1944- 1950
|
|
|
| [14] |
ZHU Y M, HOU Z S, QIAN F, et al Dual RBFNNs-based model-free adaptive control with aspen HYSYS simulation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28 (3): 759- 765
doi: 10.1109/TNNLS.2016.2522098
|
|
|
| [15] |
BU X H, HOU Z S, ZHANG H W Data-driven multiagent systems consensus tracking using model free adaptive control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29 (5): 1514- 1524
doi: 10.1109/TNNLS.2017.2673020
|
|
|
| [16] |
XU D Z, SHI Y, JI Z C Model-free adaptive discrete-time integral sliding-mode-constrained-control for autonomous 4WMV parking systems[J]. IEEE Transactions on Industrial Electronics, 2018, 65 (1): 834- 843
doi: 10.1109/TIE.2017.2739680
|
|
|
| [17] |
WANG Z W, NASSER M N, HUANG T S Spatial-spectral classification of hyperspectral images using discriminative dictionary designed by learning vector quantization[J]. IEEE Geoscience and Remote Sensing Society, 2013, 52 (8): 4808- 4822
|
|
|
| [18] |
YANG H T, HUANG C M, HUANG Y C, et al A weather-based hybrid method for 1-day ahead hourly forecasting of PV power output[J]. IEEE Transactions on Sustainable Energy, 2014, 5 (3): 917- 926
doi: 10.1109/TSTE.2014.2313600
|
|
|
| [19] |
EKRAMIAN M, SHEIKHOLESLAM F, HOSSEINNIA S, et al Adaptive state observer for lipschitz nonlinear systems[J]. Systems and Control Letters, 2013, 62 (4): 319- 323
doi: 10.1016/j.sysconle.2013.01.002
|
|
|
| [20] |
HOU Z S, JIN S T Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems[J]. IEEE Transactions on Neural Networks, 2011, 22 (12): 2173- 2188
doi: 10.1109/TNN.2011.2176141
|
|
|
| [21] |
HOU Z S, ZHU Y M Controller-dynamic-linearization- based model free adaptive control for discrete-time nonlinear systems[J]. IEEE Transactions on Industrial Informatics, 2013, 9 (4): 2301- 2309
doi: 10.1109/TII.2013.2257806
|
|
|
| [22] |
HOU Z S, JIN S T A novel data-driven control approach for a class of discrete-time nonlinear systems[J]. IEEE Transactions on Control Systems Technology, 2011, 19 (6): 1549- 1558
doi: 10.1109/TCST.2010.2093136
|
|
|
| [23] |
黄萍, 钟慧敏, 陈博 正常青年人三维步态: 时空及运动学和运动力学参数分析[J]. 中国组织工程研究, 2015, 19 (24): 3882- 3888
HUANG Ping, ZHONG Hui-min, CHEN Bo Three- dimensional gait analysis in normal young adults: temporal, kinematic and mechanical parameters[J]. Chinese Journal of Tissue Engineering Research, 2015, 19 (24): 3882- 3888
doi: 10.3969/j.issn.2095-4344.2015.24.021
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|