| Mechanical and Energy Engineering |
|

|
|
|
| Real-time walking pattern optimization for humanoid robot based on model predictive control |
Jia-tao DING( ),Jie HE,Lin-zhi LI,Xiao-hui XIAO*() ),Jie HE,Lin-zhi LI,Xiao-hui XIAO*() |
| School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China |
|
|
|
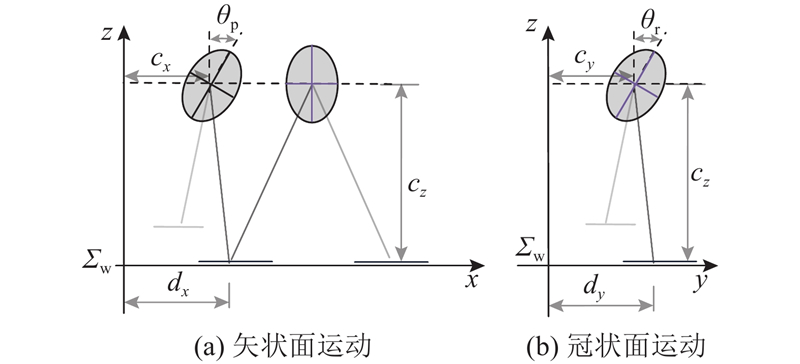
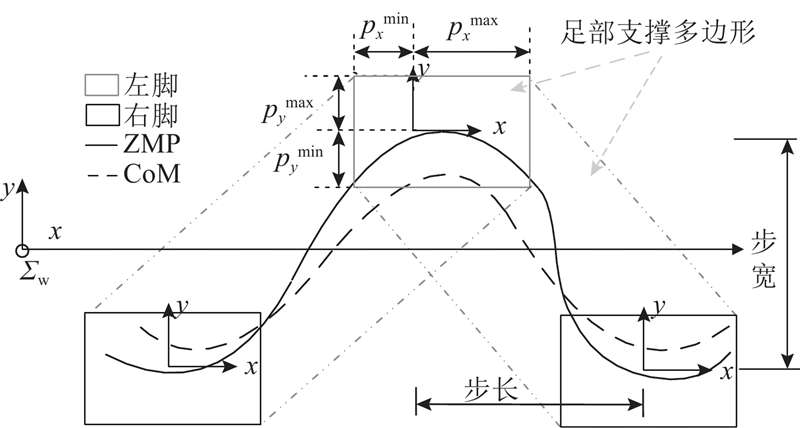
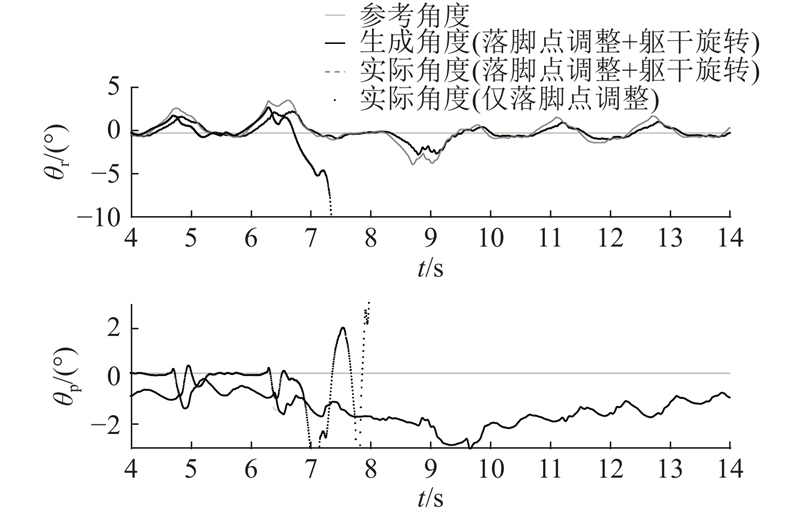
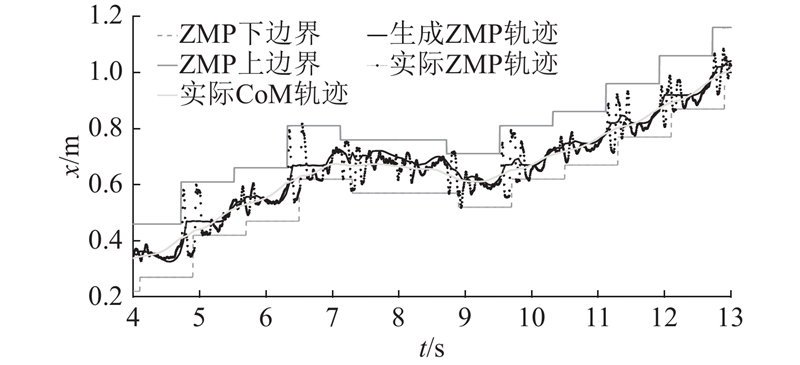
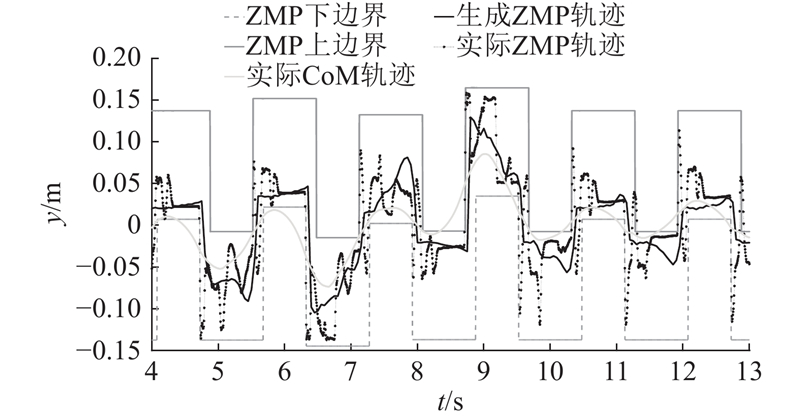
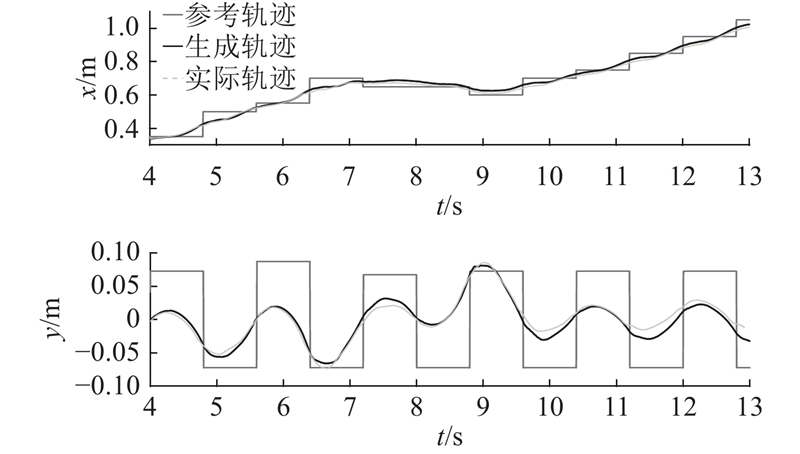
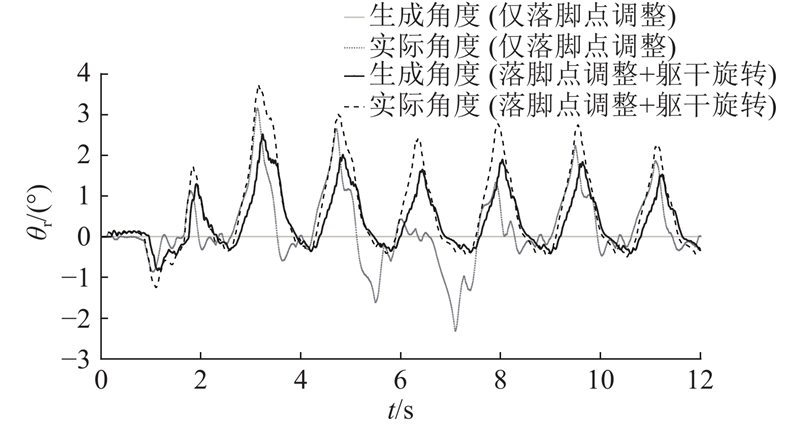
Abstract A model predictive control (MPC) strategy was proposed for walking pattern generation and optimization in order to compensate for the dynamic disturbances during the walking process of a humanoid robot. The state equation of the locomotion system was established based on the inverted pendulum plus flywheel model (IPFM). Given the reference step locations and reference body rotation angles, the multi-objective cost function was proposed, where the center of mass (CoM) trajectory generation, step locations adjustment and trunk rotation optimization were addressed simultaneously. The quadratic programming (QP) problem was formulated by considering the feasibility constraints including the constraints of maximal support region, limits of step location variation and others. The optimal CoM trajectory, step locations and trunk rotation angles were computed online by using the open-sourced solver. The simulation results demonstrated the feasibility and effectiveness of the proposed method. Results show that each control loop is solved within 2 ms so that it can be used in real time. The proposed method endows humanoids with the ability of walking stably with larger variation of step parameters by exploiting reactive trunk rotation. The robot can recover from severer external pushes from different directions by using the proposed method, compared with other strategies which merely adjust the step locations.
|
|
Received: 01 February 2019
Published: 30 September 2019
|
|
|
|
Corresponding Authors:
Xiao-hui XIAO
E-mail: jtdingx@163.com;xhxiao@whu.edu.cn
|
基于模型预测控制的仿人机器人实时步态优化
为了提高仿人机器人在行走过程中的抗干扰能力,提出基于模型预测控制(MPC)的步态生成与优化策略. 基于飞轮倒立摆模型(IPFM),建立系统状态空间模型. 给定落脚点参考位置和躯干旋转参考角度,提出包含质心(CoM)轨迹生成、落脚点调整和躯干旋转角度优化的多目标惩罚函数;考虑足部支撑范围、落脚点变动范围等可行性约束,建立二次规划(QP)求解模型. 利用开源求解器,实现最优质心轨迹、足部落脚点和躯干旋转角度的在线生成. 通过仿真验证了该算法的可行性和有效性. 结果表明,每个控制循环在2 ms内完成,满足实时控制需求;该方法能够利用躯干旋转以实现更大范围变步行参数的稳定行走;与只调整落脚点相比,机器人对各个方向外力的抵抗能力都有提高.
关键词:
模型预测控制(MPC),
飞轮倒立摆模型(IPFM),
落脚点调整,
躯干转动,
双足步行,
仿人机器人
|
|
| [1] |
颜云辉, 徐靖, 陆志国, 等 仿人服务机器人发展与研究现状[J]. 机器人, 2017, 39 (4): 551- 564
YAN Yun-hui, XU Jing, LU Zhi-guo, et al Development and research status of humanoid service robots[J]. Robot, 2017, 39 (4): 551- 564
|
|
|
| [2] |
张继文, 刘莉, 陈恳 面向全方位双足步行跟随的路径规划[J]. 自动化学报, 2016, 42 (2): 189- 201
ZHANG Ji-wen, LIU Li, CHEN Ken Omni-directional bipedal walking path planning[J]. Acta Automatica Sinica, 2016, 42 (2): 189- 201
|
|
|
| [3] |
孙广彬, 王宏, 陆志国, 等 仿人足底肌电特征的机器人行走规划[J]. 自动化学报, 2015, 41 (5): 874- 884
SUN Guang-bin, WANG Hong, LU Zhi-guo, et al Humanoid walking planning based on EMG from human foot-bottom[J]. Acta Automatica Sinica, 2015, 41 (5): 874- 884
|
|
|
| [4] |
易江, 朱秋国, 吴俊, 等 基于最优控制的仿人机器人行走振动抑制[J]. 机器人, 2018, 40 (2): 129- 135
YI Jiang, ZHU Qiu-guo, WU Jun, et al Walking vibration suppression for humanoid robot based on optimal control[J]. Robot, 2018, 40 (2): 129- 135
|
|
|
| [5] |
NASHNER L M, MCCOLLUM G The organization of human postural movements: a formal basis and experimental synthesis[J]. Behavioral and Brain Sciences, 1985, 8 (1): 135- 150
doi: 10.1017/S0140525X00020008
|
|
|
| [6] |
DIEDAM H, DIMITROV D, WIEBER P B, et al. Online walking gait generation with adaptive foot positioning through linear model predictive control [C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice: IEEE, 2008: 1121-1126.
|
|
|
| [7] |
FU C. Perturbation recovery of biped walking by updating the footstep [C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago: IEEE, 2014: 2509-2514.
|
|
|
| [8] |
张继文, 刘莉, 陈恳 基于AHRS反馈的仿人机器人步行稳定控制[J]. 清华大学学报: 自然科学版, 2016, 56 (8): 818- 823
ZHANG JI-wen, LIU Li, CHEN Ken Stabilizing control of humanoids' walking based on AHRS feedback[J]. Journal of Tsinghua University: Science and Technology, 2016, 56 (8): 818- 823
|
|
|
| [9] |
ZHANG L, FU C Predicting foot placement for balance through a simple model with swing leg dynamics[J]. Journal of Biomechanics, 2018, 77 (17): 155- 162
|
|
|
| [10] |
YU Z, ZHOU Q, CHEN X, et al Disturbance rejection for biped walking using zero-moment point variation based on body acceleration[J]. IEEE Transactions on Industrial Informatics, 2018, 15 (4): 2265- 2276
|
|
|
| [11] |
DING J, WANG Y, YANG M, et al Walking stabilization control for humanoid robots on unknown slope based on walking sequences adjustment[J]. Journal of Intelligent and Robotic Systems, 2018, 90 (3/4): 323- 338
|
|
|
| [12] |
PARK S, HORAK F B, KUO A D Postural feedback responses scale with biomechanical constraints in human standing[J]. Experimental Brain Research, 2004, 154 (4): 417- 427
doi: 10.1007/s00221-003-1674-3
|
|
|
| [13] |
KUDOH S, KOMURA T, IKEUCHI K. Stepping motion for a human-like character to maintain balance against large perturbations [C] // IEEE International Conference on Robotics and Automation. Orlando: IEEE, 2006: 2661-2666.
|
|
|
| [14] |
CHEN X, YU Z, ZHANG W, et al Bioinspired control of walking with toe-off, heel-strike, and disturbance rejection for a biped robot[J]. IEEE Transactions on Industrial Electronics, 2017, 64 (10): 7962- 7971
doi: 10.1109/TIE.2017.2698361
|
|
|
| [15] |
LI C, XIONG R, ZHU Q, et al Push recovery for the standing under-actuated bipedal robot using the hip strategy[J]. Frontiers of Information Technology and Electronic Engineering, 2015, 16 (7): 579- 593
doi: 10.1631/FITEE.14a0230
|
|
|
| [16] |
席裕庚, 李德伟, 林姝 模型预测控制: 现状与挑战[J]. 自动化学报, 2013, 39 (3): 222- 236
XI Yu-geng, LI De-wei, LIN Shu Model predictive control: status and challenges[J]. Acta Automatica Sinica, 2013, 39 (3): 222- 236
|
|
|
| [17] |
AFTAB Z, ROBERT T, WIEBER P B. Ankle, hip and stepping strategies for humanoid balance recovery with a single model predictive control scheme [C] // IEEE-RAS International Conference on Humanoid Robots. Osaka: IEEE, 2012: 159-164.
|
|
|
| [18] |
LACK J. Integrating the effects of angular momentum and changing center of mass height in bipedal locomotion planning [C] // IEEE-RAS International Conference on Humanoid Robots. Seoul: IEEE, 2015: 651-656.
|
|
|
| [19] |
SHAFIEE-ASHTIANI M, YOUSEFI-KOMA A, SHARIAT-PANAHI M. Robust bipedal locomotion control based on model predictive control and divergent component of motion [C] // IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 3505-3510.
|
|
|
| [20] |
KAJITA S, KANEHIRO F, KANEKO K, et al. The 3D linear inverted pendulum mode: a simple modeling for a biped walking pattern generation [C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui: IEEE, 2001: 239-246.
|
|
|
| [21] |
PRATT J, CARFF J, DRAKUNOV S, et al. Capture point: a step toward humanoid push recovery [C] // IEEE-RAS International Conference on Humanoid Robots. Genova: IEEE, 2006: 200-207.
|
|
|
| [22] |
VUKOBRATOVI? M, BOROVAC B Zero-moment point-thirty five years of its life[J]. International Journal of Humanoid Robotics, 2004, 1 (01): 157- 173
doi: 10.1142/S0219843604000083
|
|
|
| [23] |
陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013.
|
|
|
| [24] |
HERDT A, PERRIN N, WIEBER P B. Walking without thinking about it [C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei: IEEE, 2010: 190-195.
|
|
|
| [25] |
NAVEAU M, KUDRUSS M, STASSE O, et al A reactive walking pattern generator based on nonlinear model predictive control[J]. IEEE Robotics and Automation Letters, 2017, 2 (1): 10- 17
doi: 10.1109/LRA.2016.2518739
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|