| Automatic Technology, Computer Technology |
|


|
|
|
| Waveform control algorithm for pectoral fin of robotic stingray based on Hopf oscillator |
Yang-wei WANG1,2( ),Zeng FAN2,Dong-biao ZHAO2,Kai LIU2 ),Zeng FAN2,Dong-biao ZHAO2,Kai LIU2 |
1. College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China
2. College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China |
|
|
|
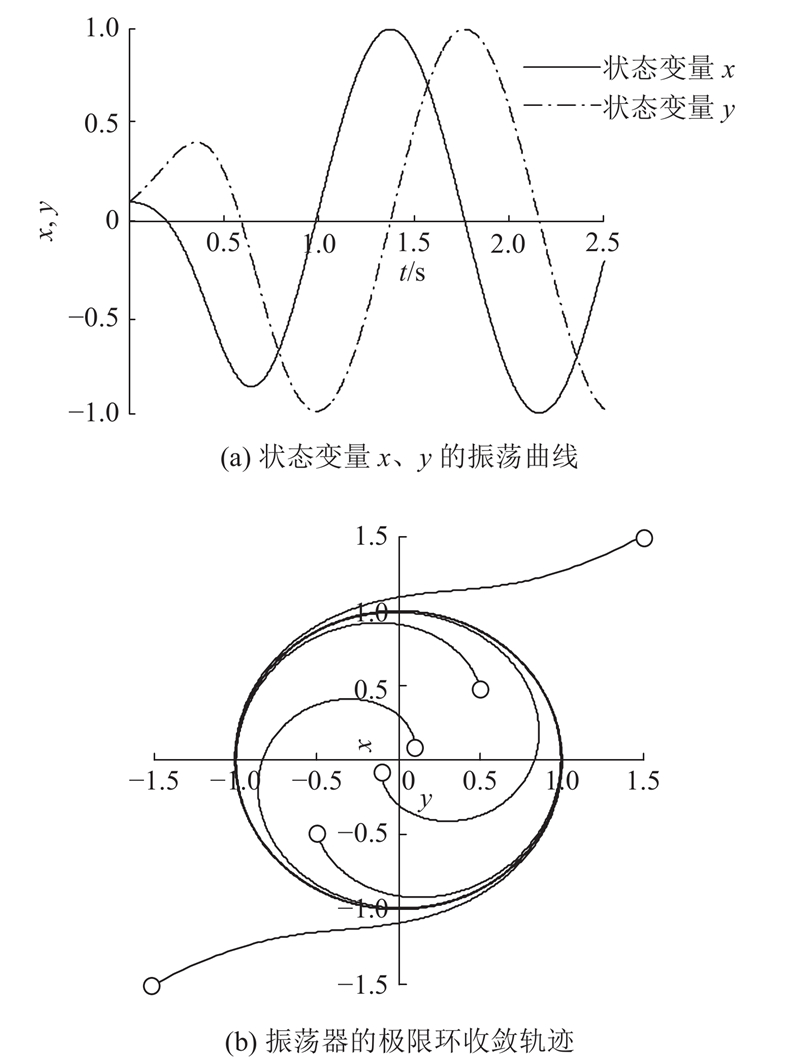
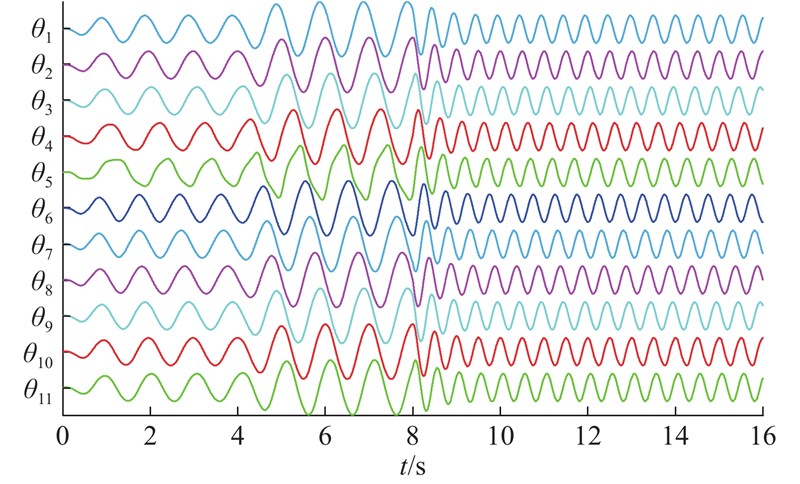
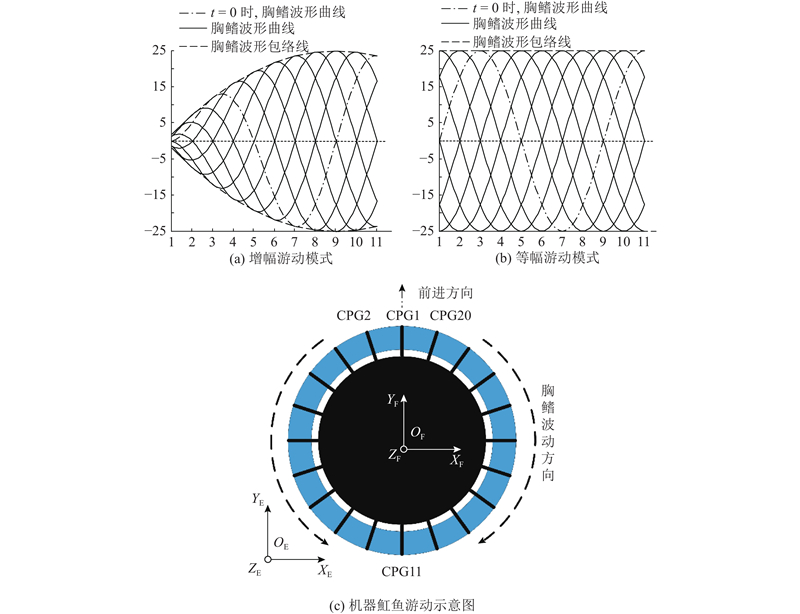
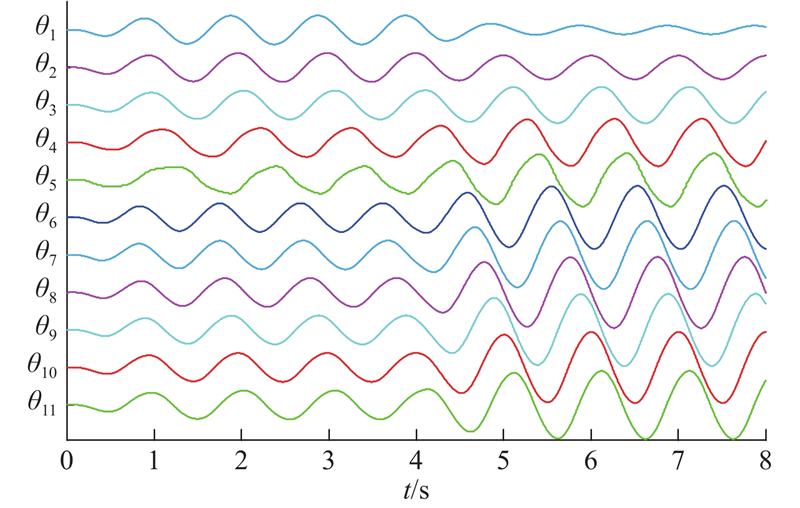
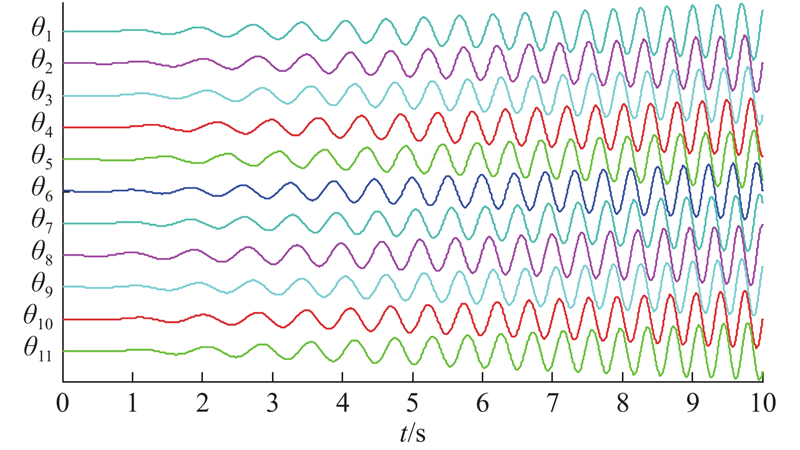
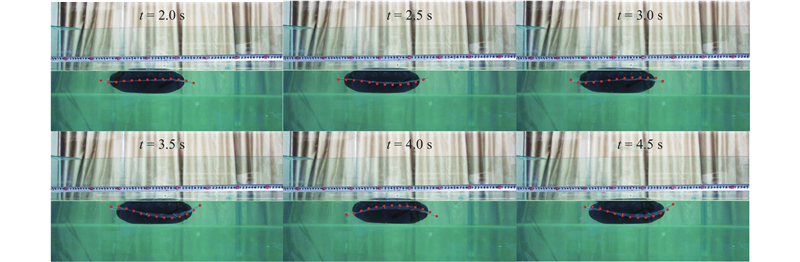
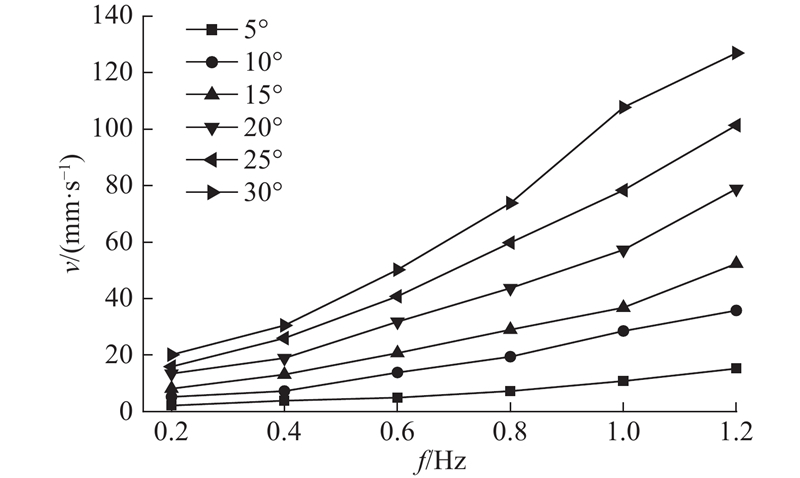
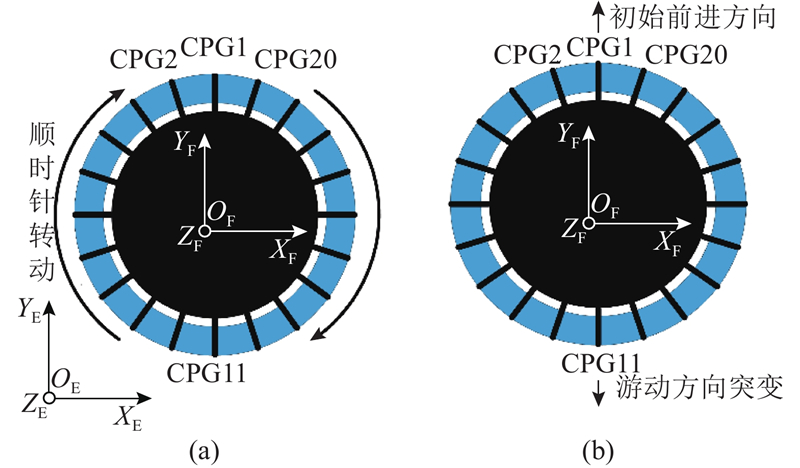
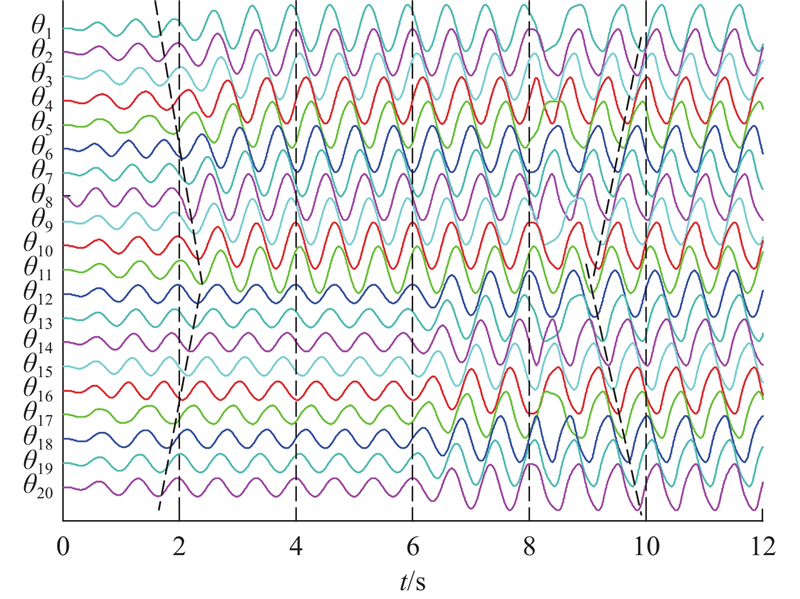
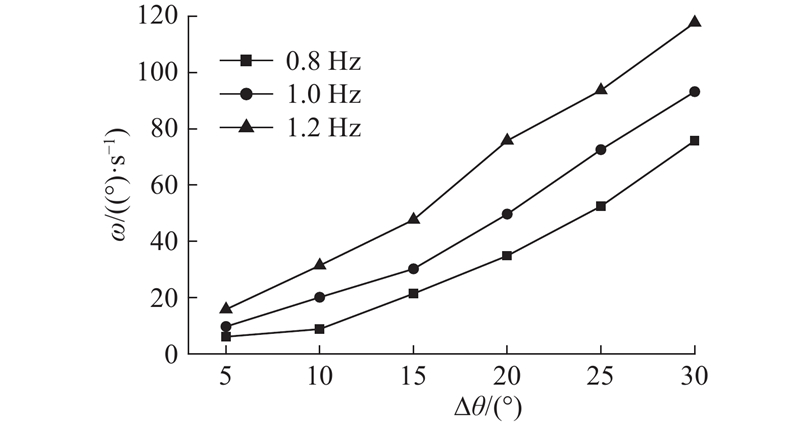
Abstract A bionic central pattern generator pectoral-fin-waveform control strategy was proposed based on Hopf oscillators in order to obtain the propulsive waveform and the swimming performance like that of the pectoral fins of the stingray. A central pattern generator (CPG) topology network model was constructed by 20 coupled Hopf oscillators based on the structure and swimming characteristics of the robotic stingray. The topology network model can output the dynamic position signals of the pectoral-fin-waveform under three different swimming modes- parading, accelerating and turning through the given parameters-amplitude, frequency and wave number. The simulation results show that the topology network model can quickly respond to changes in input parameters and stably output the smooth and continuous dynamic position signal. Experiments were performed to analyze the feasibility of topological network model for controlling the pectoral fin fluctuation and the influence of network input parameters on the swimming performance. The experimental results show that the topological network model can control the fin-surface of the robotic stingray to form a waveform close to that of the fish by stably outputting the coupled waveform signal, which can control robotic stingray to realize various swimming modes and switch between the each swimming modes flexibly and smoothly.
|
|
Received: 29 May 2018
Published: 25 June 2019
|
|
|
基于Hopf振荡器的仿生机器魟鱼胸鳍波形控制算法
为了获得与生物魟鱼胸鳍相近的推进波形和游动性能,提出基于Hopf振荡器的仿生中枢模式发生器(CPG)胸鳍波形控制策略. 针对仿生机器魟鱼的结构与游动特征,利用20个Hopf振荡器耦合构建中心式CPG拓扑网络模型;通过输入参数幅值、频率和波数,控制该拓扑网络模型输出仿生机器魟鱼定常巡游、加速游动和机动转弯3种游动模式下胸鳍波形的动态位置信号. 通过仿真验证了该拓扑网络模型能够快速响应输入参数的变化,稳定输出平滑、连续的动态位置信号. 通过试验研究该拓扑网络模型控制仿生机器魟鱼胸鳍波动的可行性以及网络的输入参数对仿生机器魟鱼游动性能的影响. 试验结果表明,该模型能够稳定地输出耦合的波形信号,控制仿生机器魟鱼鳍面形成与生物鱼相似的推进波形,实现各游动模式以及各游动模式间灵活平滑地切换.
关键词:
仿生机器鱼,
胸鳍,
Hopf振荡器,
中枢模式发生器(CPG)
|
|
| [1] |
TRIANTAFYLLOU M S, TRIANTAFYLLOU G S An efficient swimming machine[J]. Scientific American, 1995, 272 (3): 64- 70
doi: 10.1038/scientificamerican0395-64
|
|
|
| [2] |
BARRETT D S, TRIANTAFYLLOU M S, YUE D K P, et al Drag reduction in fish-like locomotion[J]. Journal of Fluid Mechanics, 2000, 392 (392): 183- 212
|
|
|
| [3] |
WEI Q P, WANG S, DONG X, et al Design and kinetic analysis of a biomimetic underwater vehicle with two undulating long-fins[J]. Acta Automatica Sinica, 2013, 39 (8): 1330- 1338
doi: 10.1016/S1874-1029(13)60049-X
|
|
|
| [4] |
NIU X, XU J, REN Q, et al Locomotion learning for an anguilliform robotic fish using central pattern generator approach[J]. IEEE Transactions on Industrial Electronics, 2014, 61 (9): 4780- 4787
doi: 10.1109/TIE.2013.2288193
|
|
|
| [5] |
SFAKIOTAKIS M, LANE D M, DAVIES J B C Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Oceanic Engineering, 1999, 24 (2): 237- 252
doi: 10.1109/48.757275
|
|
|
| [6] |
郑浩峻, 张秀丽, 李铁民, 等 基于CPG原理的机器人运动控制方法[J]. 高技术通讯, 2003, 13 (7): 64- 68
ZHENG Hao-jun, ZHANG Xiu-li, LI Tie-min, et al CPG-based methods for motion control of robot[J]. High Technology Letters, 2003, 13 (7): 64- 68
doi: 10.3321/j.issn:1002-0470.2003.07.014
|
|
|
| [7] |
WYART C, BENE F D, WARP E, et al Optogenetic dissection of a behavioral module in the vertebrate spinal cord[J]. Nature, 2009, 461 (7262): 407- 410
doi: 10.1038/nature08323
|
|
|
| [8] |
IJSPEERT A J Central pattern generators for locomotion control in animals and robots: a review[J]. Neural Netw, 2008, 21 (4): 642- 653
doi: 10.1016/j.neunet.2008.03.014
|
|
|
| [9] |
TRAN D T, KOO I M, LEE Y H, et al Central pattern generator based reflexive control of quadruped walking robots using a recurrent neural network[J]. Robotics and Autonomous Systems, 2014, 62 (10): 1497- 1516
doi: 10.1016/j.robot.2014.05.011
|
|
|
| [10] |
ZHOU C, LOW K H. Kinematic modeling framework for biomimetic undulatory fin motion based on coupled nonlinear oscillators [C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, China: IEEE, 2010: 934-939.
|
|
|
| [11] |
ZHOU C, LOW K H. Optimization of swimming locomotion for fish robots with multi-actuation [C] // IEEE International Conference on Robotics and Biomimetics. Karon Beach, Phuket, Thailand: IEEE, 2011: 2120-2125.
|
|
|
| [12] |
YU J, WANG M, TAN M, et al Three-dimensional swimming[J]. IEEE Robotics and Automation Magazine, 2011, 18 (4): 47- 58
doi: 10.1109/MRA.2011.942998
|
|
|
| [13] |
MA Z W, ZHOU H, WANG G M, et al A bio-inspired strategy for robotic fish swimming in unsteday flows[J]. Applied Mechanics and Materials, 2013, 341-342: 754- 759
doi: 10.4028/www.scientific.net/AMM.341-342
|
|
|
| [14] |
高琴, 王哲龙, 赵红宇 基于Hopf振荡器实现的蛇形机器人的步态控制[J]. 机器人, 2014, 36 (6): 688- 696
GAO Qin, WANG Zhe-long, ZHAO Hong-yu Gait control for a snake robot based on Hopf oscillator model[J]. Robot, 2014, 36 (6): 688- 696
|
|
|
| [15] |
高琴, 王哲龙, 胡卫建, 等 基于振荡器模型的蛇形机器人的步态仿真[J]. 系统仿真学报, 2015, 27 (6): 1374- 1380
GAO Qin, WANG Zhe-long, HU Wei-jian, et al Gait simulation of snake robot based on CPG method[J]. Journal of System Simulation, 2015, 27 (6): 1374- 1380
|
|
|
| [16] |
HU Y, ZHANG S, LIANG J, et al. Development and CPG-based control of a biomimetic robotic fish with advanced underwater mobility [C] // IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014: 813-818.
|
|
|
| [17] |
WANG G, CHEN X, HAN S K Central pattern generator and feedforward neural network-based self-adaptive gait control for a crab-like robot locomoting on complex terrain under two reflex mechanisms[J]. International Journal of Advanced Robotic Systems, 2017, 14 (4): 1- 13
|
|
|
| [18] |
TANGORRA J L, ESPOSITO C J, LAUDER G V. Biorobotic fins for investigations of fish locomotion [C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis, USA: IEEE, 2009: 2120-2125.
|
|
|
| [19] |
BUCHLI J, IJSPEERT A J. Distributed central pattern generator model for robotics application based on phase sensitivity analysis [C] // Biologically Inspired Approaches to Advanced Information Technology: 1st International Workshop (BioADIT 2004). Berlin, Germany: Springer, 2004: 333--349.
|
|
|
| [20] |
HE J, ZHANG Y H Experimental investigation to the kinematics of a blue spotted ray like underwater propulsor[J]. Research Journal of Applied Sciences, Engineering and Technology, 2013, 6 (15): 2799- 2806
doi: 10.19026/rjaset.6.3788
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|