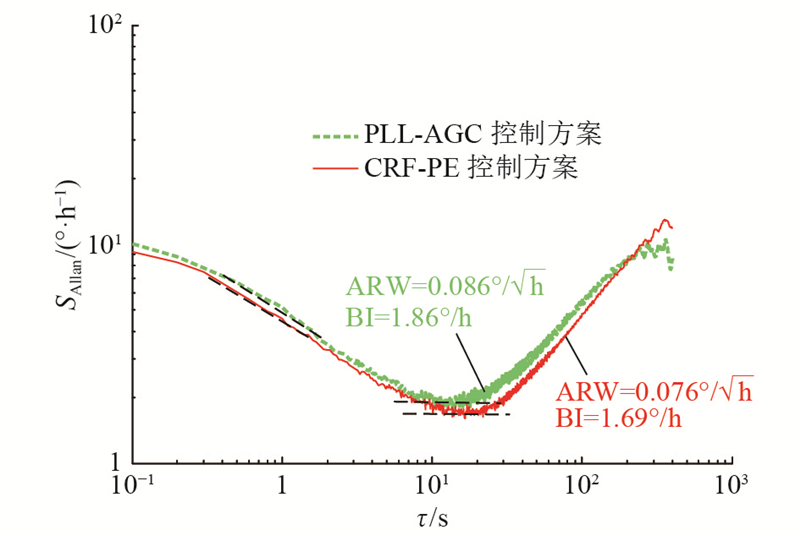
A novel drive-mode control scheme for MEMS gyroscopes was presented, where the gyroscopes were parametrically excited with constant resonant frequency. The proposed control scheme enabled a constant resonant frequency excitation with parametric amplification in the drive mode via triangular parallel capacitors, to keep the resonant frequency and quality factor constant against environmental fluctuations, and to improve the gyroscope temperature performance. First, frequency tuning and parametric excitation by means of triangular capacitors were introduced. Then, a new control scheme based on parametric excitation at constant frequency was proposed and implemented. The simulation results indicate that the resonant frequency is tuned to be constant and the dive-mode vibration amplitude is controlled to be stable. Finally, the experimental results indicate that the bias instability of gyroscope was 1.69°/h, which was better than that of the traditional scheme, and the temperature drift of zero-rate output during temperature cooling down was reduced to half compared to the traditional control scheme.
Fig.1Schematic diagram of slot-structure gyrosocpe
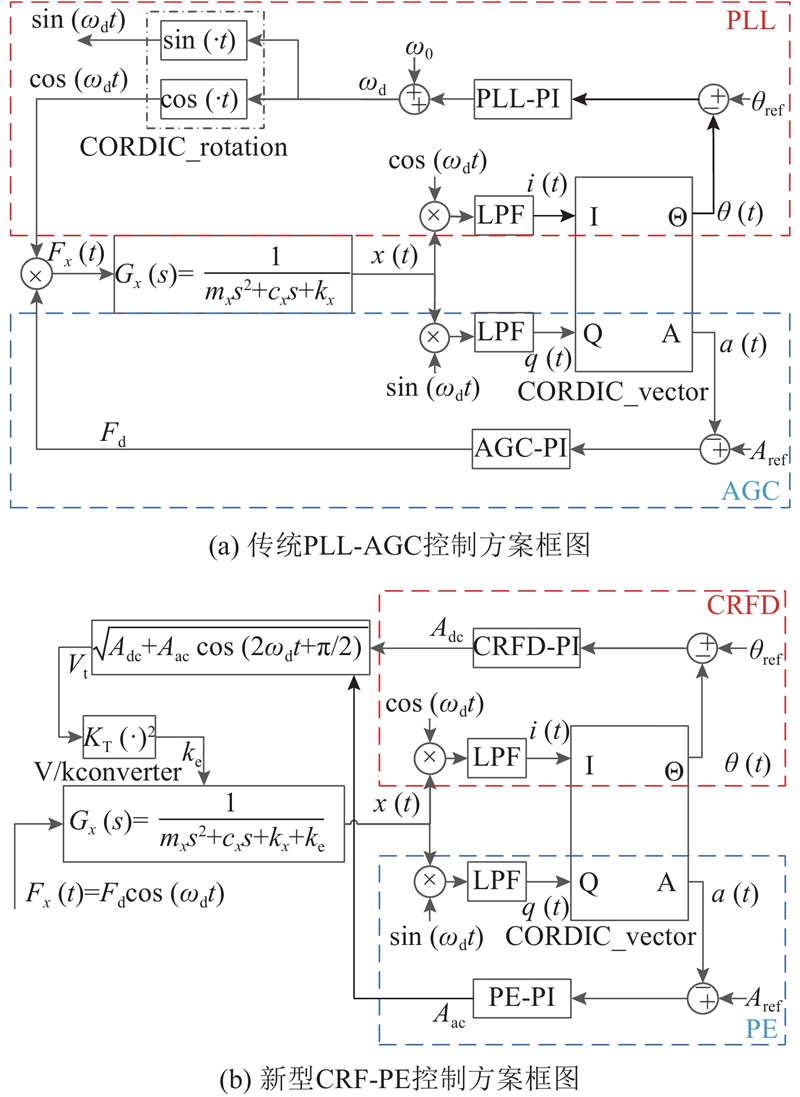
Fig.2Blocks of traditional PLL-AGC control scheme and novel CRF-PE control scheme
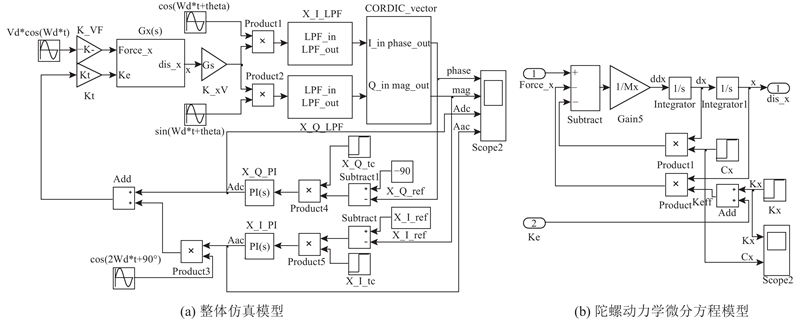
Fig.3Simulation of CRF-PE control model
参数
数值
单位
参数
数值
单位
f0
1 835.91
Hz
Q0
8 000
—
mx
1.56×10?5
kg
KVF
7.828×10?6
N/V
kx
2 075.800
N/m
KXV
1×105
V/m
cx
2.25×10?5
—
KT
0.038
N/(m?V2)
Tab.1Simulation parameters of CRF-PE control scheme
Fig.4Simulation results of CRF-PE control scheme
Fig.5Photo of experimental platform for CRF-PE control
Fig.6Drive-mode one-hour stability test under CRF-PE control
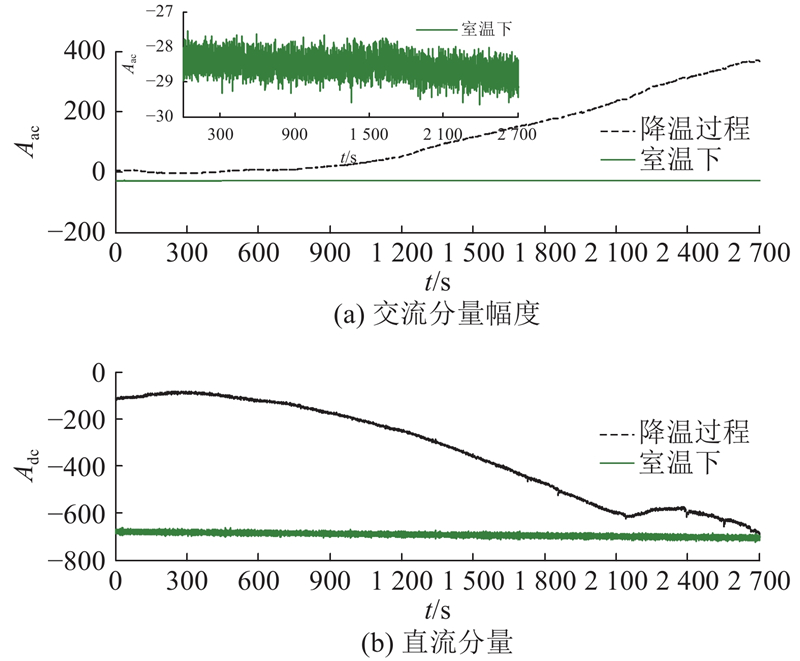
Fig.745-minite data of direct current component and amplitude of alternating current component under CRF-PE control
Fig.8Comparison of Allan variance graphs of gyroscope outputs using novel CRF-PE control scheme and conventional PLL-AGC control scheme
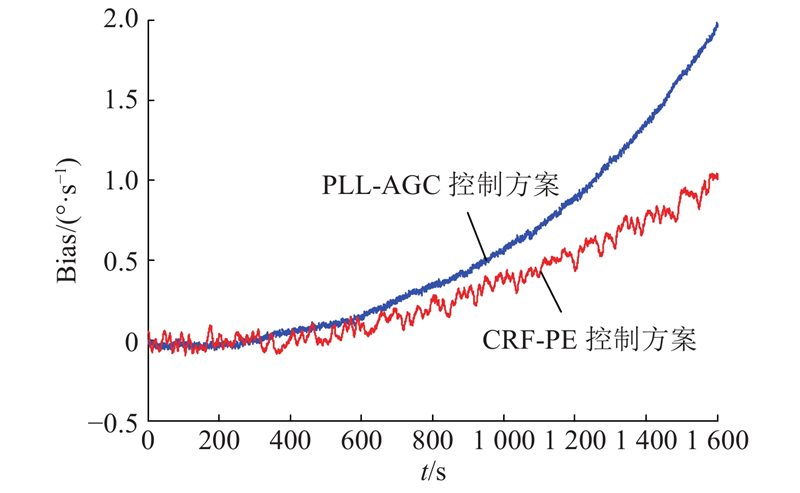
Fig.9Comparison of zero-rate outputs using novel CRF-PE control scheme and conventional PLL-AGC control scheme during temperature cooling down
[1]
NORTHEMANN T, MAURER M, ROMBACH S, et al. Phase-locked drive loop with amplitude regulation based on phase-shifting for gyroscope [C] // IEEE International Conference Solid-State Sensors, Actuatrors, and Microsystems (Transducers). Beijing: IEEE, 2011: 16-19.
[2]
OBOE R, ANTONELLO R, LASALANDRA E, et al Control of a Z-axis MEMS vibrational gyroscope [J]. IEEE/ASME Transactions on Mechatronics, 2005, 10 (4): 364- 370
doi: 10.1109/TMECH.2005.852437
[3]
CUI J, CHI X Z, DING H T, et al Transient response and stability of the AGC-PI closed-loop controlled MEMS vibratory gyroscopes[J]. Journal of Micromechanics and Microengineering, 2009, 19 (12): 125015
doi: 10.1088/0960-1317/19/12/125015
[4]
ZHU H J, JIN Z H, HU S C, et al. Drive mode control for MEMS gyroscopes with electrostatically tunable structure [C] // IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-Nano). Suzhou: IEEE, 2014: 273-276.
[5]
OROPEZA-RAMOS L A, TURNER K L. Parametric resonance amplification in a MEMGyroscope [C] // IEEE Sensors. Irvine: IEEE, 2005: 660-663.
[6]
HARISH K M, GALLACHER B J, BURDESS J S, et al Experimental investigation of parametric and externally forced motion in resonant MEMS sensors[J]. Journal of Micromechanics and Microengineering, 2008, 19 (1): 015021
[7]
KHIRALLAH K Parametric excitation, amplifica-tion, and tuning of MEMS folded-beam comb drive oscillator[J]. Journal of Microelectromechanical Systems, 2013, 22 (2): 318- 330
doi: 10.1109/JMEMS.2012.2221156
[8]
NITZAN S H, ZEGA V, LI M, et al Self-induced parametric amplification arising from nonlinear elastic coupling in a micromechanical resonating disk gyroscope[J]. Scientific Reports, 2015, 5: 9036
doi: 10.1038/srep09036
[9]
GALLACHER B J, BURDESS J S, HARISH K M A control scheme for a MEMS electrostatic resonant gyroscope excited using combined parametric excitation and harmonic forcing[J]. Journal of Micromechanics and Microengineering, 2006, 16 (2): 320- 331
doi: 10.1088/0960-1317/16/2/017
[10]
SENKAL D, NG E J, HONG V, et al. Parametric drive of a toroidal MEMS rate integrating gyroscope demonstrating <20 PPM scale factor stability [C] // 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS). Estoril: IEEE, 2015: 29-32.
[11]
ZHANG X F, ZHAO H M, XU D C, et al. Research of suppressing electrical feed-through for resonant ring MEMS gyroscope based on parametric excitation [C] // 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). Xi' an: IEEE, 2018: 133-136.
[12]
HU S C, JIN Z H, ZHU H J, et al A Slot-structure MEMS gyroscope working at atmosphere with tunable electrostatic spring constant[J]. Journal of Microelectromechanical Systems, 2013, 22 (4): 909- 918
doi: 10.1109/JMEMS.2013.2250485
[13]
钱磊, 赵鹤鸣, 张晓峰, 等 基于参数激励的MEMS环式陀螺驱动方法与实现[J]. 智能与传感技术, 2018, 26 (11): 293- 302 QIAN Lei, ZHAO He-ming, ZHANG Xiao-feng, et al Improvement of MEMS gyroscope driving method based on parametric excitation[J]. Computer Measurement and Control, 2018, 26 (11): 293- 302
WU H B, ZHENG X D, LIN Y Y, et al. A novel amplitude-phase information extraction architecture for MEMS vibratory gyroscopes using a modified double side-band demodulation configuration [C] // 2018 IEEE Sensors. New Delhi: IEEE, 2018: 1134-1137.
[16]
ZHENG X, D LIU S Q, LIN Y Y, et al An improved phase-robust configuration for vibration amplitude-phase extraction for capacitive MEMS gyroscopes[J]. Micromachines, 2018, 9 (7): 362
doi: 10.3390/mi9070362
[17]
LIN Y Y, ZHENG X D, LIU S Q, et al Temperature-dependence improvement for a MEMS gyroscope using triangular-electrode based capacitive detection method[J]. IET Micro & Nano Letters, 2017, 12 (11): 828- 833
[18]
WALTHER A, BLANC C L, DELORME N, et al Bias contributions in a MEMS tuning fork gyroscope[J]. Journal of Microelectromechanical Systems, 2013, 22 (2): 303- 308
doi: 10.1109/JMEMS.2012.2221158