| 计算机技术 |
|


|
|
|
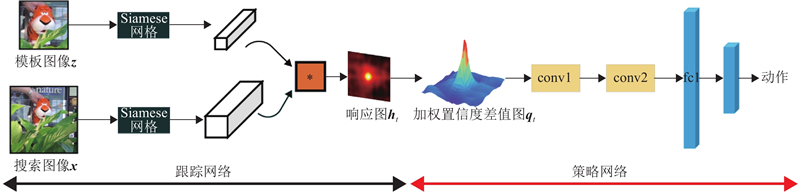
| 基于策略梯度的目标跟踪方法 |
王康豪( ),殷海兵*(),黄晓峰 ),殷海兵*(),黄晓峰 |
| 杭州电子科技大学 通信工程学院,浙江 杭州 310018 |
|
| Visual object tracking based on policy gradient |
| Kang-hao WANG(),Hai-bing YIN*(),Xiao-feng HUANG |
| College of Communication Engineering, Hangzhou Dianzi University, Hangzhou 310018, China |
| 1 |
熊昌镇, 王润玲, 邹建成 基于多高斯相关滤波的实时跟踪算法[J]. 浙江大学学报: 工学版, 2019, 53 (8): 1488- 1495
XIONG Chang-zhen, WANG Run-ling, ZOU Jian-cheng Real time tracking algorithm based on multi Gaussian correlation filtering[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (8): 1488- 1495
|
| 2 |
WANG N, ZHOU W, LI H Reliable re-detection for long-term tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2019, 29 (3): 730- 743
doi: 10.1109/TCSVT.2018.2816570
|
| 3 |
MA C, YANG X, ZHANG C, et al. Long-term correlation tracking [C]// Proceedings of CVPR. Boston: IEEE, 2015: 5388-5396.
|
| 4 |
BOLME D, BEVERIDGE J, DRAPER B, et al. Visual object tracking using adaptive correlation filters [C]// Proceedings of CVPR. San Francisco: IEEE, 2010: 2544-2550.
|
| 5 |
WANG M, LIU Y, HUANG Z. Large margin object tracking with circulant feature maps [C]// Proceedings of CVPR. Hawaii: IEEE, 2017: 4021-4029.
|
| 6 |
HUANG C, LUCEY S, RAMANAN D. Learning policies for adaptive tracking with deep feature cascades [C]// Proceedings of ICCV. Venice: IEEE, 2017: 105-114.
|
| 7 |
CHOI J, KWON J, LEE K Real-time visual tracking by deep reinforced decision making[J]. Computer Vision and Image Understanding, 2018, 171 (2): 10- 19
|
| 8 |
SUPANCIC J, RAMANAN D. Tracking as online decision-making: learning a policy from streaming videos with reinforce-ment learning [C]// Proceedings of ICCV. Venice: IEEE, 2017: 322-331.
|
| 9 |
BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking [C]// Proceedings of ECCV. Amsterdam: Springer, 2016: 850–865.
|
| 10 |
HAUSKNECHT M, STONE P. Deep recurrent Q-learning for partially observable MDPs [C]// Proceedings of AAAI. Austin: Springer, 2015: 29-37.
|
| 11 |
BHAT G, JOHNANDER J, DANELLJAN M, et al. Unveiling the power of deep tracking [C]// Proceedings of ECCV. Munich: Springer, 2018: 483-498.
|
| 12 |
江宝安, 卢焕章 粒子滤波器及其在目标跟踪中的应用[J]. 雷达科学与技术, 2003, (3): 170- 174
JIANG Bao-an, LU Huan-zhang Particle filter and its application in object tracking[J]. Radar Science and Technology, 2003, (3): 170- 174
doi: 10.3969/j.issn.1672-2337.2003.03.010
|
| 13 |
FAN H, LIN L, YANG F, et al. LaSOT: a high-quality benchmark for large-scale single object tracking [C]// Proceedings of CVPR. Long Beach: IEEE, 2019: 5374-5383.
|
| 14 |
WU Y, LIM J, YANG M. Online object tracking: a benchmark [C]// Proceedings of CVPR. Portland: IEEE, 2013: 2411-2418.
|
| 15 |
HENRIQUES J, CASEIRO R, MARTINS P, et al High speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (3): 583- 596
doi: 10.1109/TPAMI.2014.2345390
|
| 16 |
DANELLJAN M, HAGER G, KHAN F, et al. Accurate scale estimation for robust visual tracking [C]// Proceedings of British Machine Vision Conference. Nottingham: BMVA, 2014: 1–11.
|
| 17 |
LI Y, ZHU J. A scale adaptive kernel correlation filter tracker with feature integration [C]// Proceedings of ECCV. Heidelberg: Springer, 2014: 254–265.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|