| 计算机技术与图像处理 |
|


|
|
|
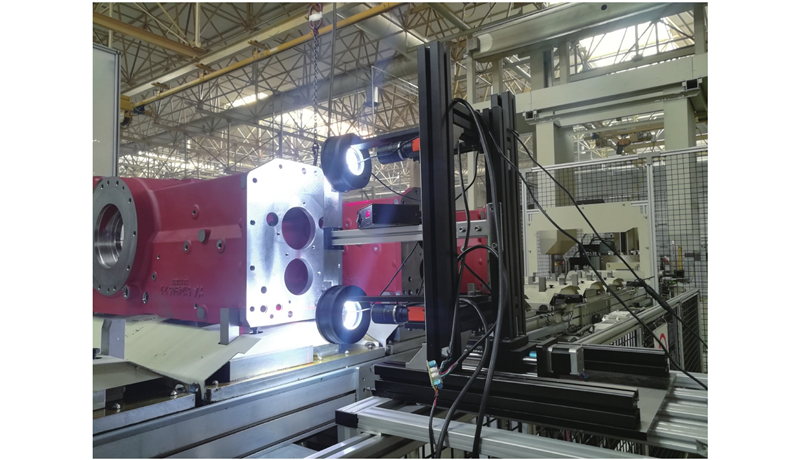
| 采用结构光的大跨度销孔加工精度在线测量 |
李瑛( ),成芳*(),赵志林 ),成芳*(),赵志林 |
| 浙江大学 生物系统工程与食品科学学院,浙江 杭州 310058 |
|
| Machining precision online measurement of large span pin hole using structured light |
| Ying LI(),Fang CHENG*(),Zhi-lin ZHAO |
| College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou 310058, China |
| 1 |
张明海 三坐标测量机在拖拉机制造业的应用[J]. 南方农机, 2017, 48 (24): 64- 68
ZHANG Ming-hai Application of coordinate measuring machine in tractor manufacturing industry[J]. South Agricultural Machinery, 2017, 48 (24): 64- 68
doi: 10.3969/j.issn.1672-3872.2017.24.050
|
| 2 |
冯乾新, 梁瑞丽 孔组位置度量规的设计[J]. 工具技术, 2015, 49 (1): 87- 90
FENG Qian-xin, LIANG Rui-li Design of hole set position gauge[J]. Tool Engineering, 2015, 49 (1): 87- 90
doi: 10.3969/j.issn.1000-7008.2015.01.024
|
| 3 |
张亚伟, 王冬, 陈度, 等 大型收获机械发动机孔组位置度误差在线检测方法[J]. 农业机械学报, 2017, 48 (Suppl. 1): 71- 78
ZHANG Ya-wei, WANG Dong, CHEN Du online method for large-scale harvester engine punch combination position accuracy measurement[J]. Journal of Agricultural Machinery, 2017, 48 (Suppl. 1): 71- 78
|
| 4 |
杨永奎. 基于机器视觉的液力变矩器焊缝三维检测技术研究_杨永奎[D]. 西安: 长安大学, 2017.
YANG Yong-kui. Research on three-dimensional inspection technology of weld of hydraulic torque converter based on machine vision[D]. Xi'an: Chang'an University, 2017.
|
| 5 |
LI Y, LI Y F, WANG Q L, et al Measurement and defect detection of the weld bead based on online vision inspection[J]. IEEE Transactions on Instru- mentation and Measurement, 2010, 59 (7): 1841- 1849
doi: 10.1109/TIM.2009.2028222
|
| 6 |
陈炳权, 刘宏立, 孟凡斌 数字图像处理技术的现状及其发展方向[J]. 吉首大学学报: 自然科学版, 2009, 30 (1): 63- 70
CHEN Bing-quan, LIU Hong-li, MENG Fan-bin Digital image processing technology and its develop- ment direction[J]. Journal of Jishou University: Natural Science Edition, 2009, 30 (1): 63- 70
|
| 7 |
GADELMAWLA E S Computer vision algorithms for measurement and inspection of external screw threads[J]. Measurement, 2017, 100 (3): 36- 49
|
| 8 |
YANG S R, LIU M, YIN S B, et al. An improved method for location of concentric circles in vision measurement [J]. Measurement, 2017, 100(3): 243-251.
|
| 9 |
孙博文, 朱志明, 郭吉昌, 等 基于激光结构光的视觉传感器的图像处理技术研究应用及展望[J]. 焊接, 2018, 543 (9): 10- 14
SUN Bo-wen, ZHU Zhi-ming, GUO Ji-chang Application and prospect of image processing techno-logy for vision sensor based on laser structured light[J]. Welding and Joining, 2018, 543 (9): 10- 14
|
| 10 |
王滔. 基于结构光的焊缝跟踪伺服系统设计与研究[D]. 杭州: 浙江大学, 2017.
WANG Tao. Design and research of weld seam tracking servo system based on structure light [D]. Hangzhou: Zhejiang University, 2017.
|
| 11 |
汪小涵, 赵杰 基于线结构光视觉技术的工件尺寸三维测量系统研究[J]. 中国管理信息化, 2017, 20 (23): 178- 182
WANG Xiao-han, ZHAO Jie Reseach on 3D measuring system of workpiece dimension based on linear structured light vision technology[J]. China Management Informationization, 2017, 20 (23): 178- 182
|
| 12 |
SUN Q C, CHEN J, LI C J A robust method to extract a laser stripe centre based on grey level moment[J]. Optics and Lasers in Engineering, 2015, 67: 122- 127
doi: 10.1016/j.optlaseng.2014.11.007
|
| 13 |
MAO Q Z, CUI H, HU Q W, et al A rigorous fastener inspection approach for high-speed railway from structured light sensors[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 143: 249- 267
doi: 10.1016/j.isprsjprs.2017.11.007
|
| 14 |
田庆国, 葛宝臻, 李云鹏, 等 利用轮廓线多边形表示实时提取光带中心线[J]. 光学精密工程, 2012, 20 (6): 1357- 1364
TIAN Qing-guo, GE Bao-zhen, LI Yun-peng Real-time extraction of light stripe central line based on contour polygonal representation[J]. Optics and Precision Engineering, 2012, 20 (6): 1357- 1364
|
| 15 |
南方, 李大华, 高强, 等 改进Steger算法的自适应光条纹中心提取[J]. 激光杂志, 2018, 39 (1): 85- 88
NAN Fang, LI Da-hua, GAO Qiang Implementation of adaptive light stripe center extraction of improved Steger algorithm[J]. Laster Journal, 2018, 39 (1): 85- 88
|
| 16 |
王泽浩, 张中炜 自适应方向模板线结构光条纹中心提取方法[J]. 激光杂志, 2017, 38 (1): 60- 64
WANG Ze-hao, ZHANG Zhong-wei Adaptive direction template method to extract the center of structured light[J]. Laser Journal, 2017, 38 (1): 60- 64
|
| 17 |
胡改玲, 周翔, 杨涛, 等 光刀自适应灰度加权亚像素中心精确提取[J]. 西安交通大学学报, 2018, 52 (5): 21- 28
HU Gai-ling, ZHOU Xiang, YANG Tao Sub-pixel centerline extraction based on light stripe adaptive grayscale weighting[J]. Journal of Xi'an Jiaotong University, 2018, 52 (5): 21- 28
|
| 18 |
CUI Z Y, ZHANG H A study on contour extraction method in computer vision measurement technology[J]. Computer Modelline and New Technologies, 2013, 17 (5B): 88- 91
|
| 19 |
MOONS T, VAN GOOL L, PROESMANS M, et al Affine reconstruction from perspective image pairs with a relative object-camera translation in between[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18 (1): 77- 83
doi: 10.1109/34.476015
|
| 20 |
徐蕾, 彭月平, 贺科宁 基于改进双边滤波与随机共振的图像去噪算法研究[J]. 激光杂志, 2018, 39 (8): 142- 148
XU Lei, PENG Yue-ping, HE Ke-ning Resarch on image denoising algorithm based on improved bilateral filtering and stochastic resonance[J]. Laser Journal, 2018, 39 (8): 142- 148
|
| 21 |
TIAN Q G, ZHANG X Y, MA Q, et al Utilizing polygon segmentation technique to extract and optimize light stripe centerline in line-structured laser 3D scanner[J]. Pattern Recognition, 2016, 55: 100- 113
doi: 10.1016/j.patcog.2016.02.008
|
| 22 |
WANG Y Z, GENG B L, LONG Chao Contour extraction of a laser stripe located on a microscope image from a stereo light microscope[J]. Microscopy Research and Technique, 2019, 82 (3): 260- 271
doi: 10.1002/jemt.v82.3
|
| 23 |
段瑞玲, 李庆祥, 李玉和 图像边缘检测方法研究综述[J]. 光学技术, 2005, 31 (3): 95- 99
DUAN Rui-ling, LI Qing-xiang, LI Yu-he Summary of image edge detection[J]. Optical Techinque, 2005, 31 (3): 95- 99
|
| 24 |
赵军 焊缝结构光图像处理与特征提取方法[J]. 西安交通大学学报, 2013, 47 (1): 114- 119
ZHAO Jun Image processing and feature extraction for structured light images of welded seam[J]. Journal of Xi'an Jiaotong University, 2013, 47 (1): 114- 119
doi: 10.3969/j.issn.1008-245X.2013.01.017
|
| 25 |
何雯. 精确提取光饱和与物体边缘线结构光条纹中心的方法研究[D]. 陕西: 西北农林科技大学, 2018.
HE Wen. Research on the extraction Accuracy of laser stripe center in light saturation and at the edge of the object [D]. Shanxi: Northwest A&F University, 2018.
|
| 26 |
BAO P, ZHANG L WU X L Canny edge detection enhancement by scale multiplication[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27 (9): 1481- 1485
|
| 27 |
刘枝梅, 邓文怡, 娄小平 结构光测量系统中光条中心的提取算法[J]. 北京机械工业学院学报, 2009, 24 (1): 42- 45
LIU Zhi-mei, DENG Wen-yi, LOU Xiao-ping Extraction algorithm of light stripes center in the measurement of structured light[J]. Journal of Beijing Institute of Machinery, 2009, 24 (1): 42- 45
doi: 10.3969/j.issn.1674-6864.2009.01.011
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|