| 通信技术、电气工程 |
|


|
|
|
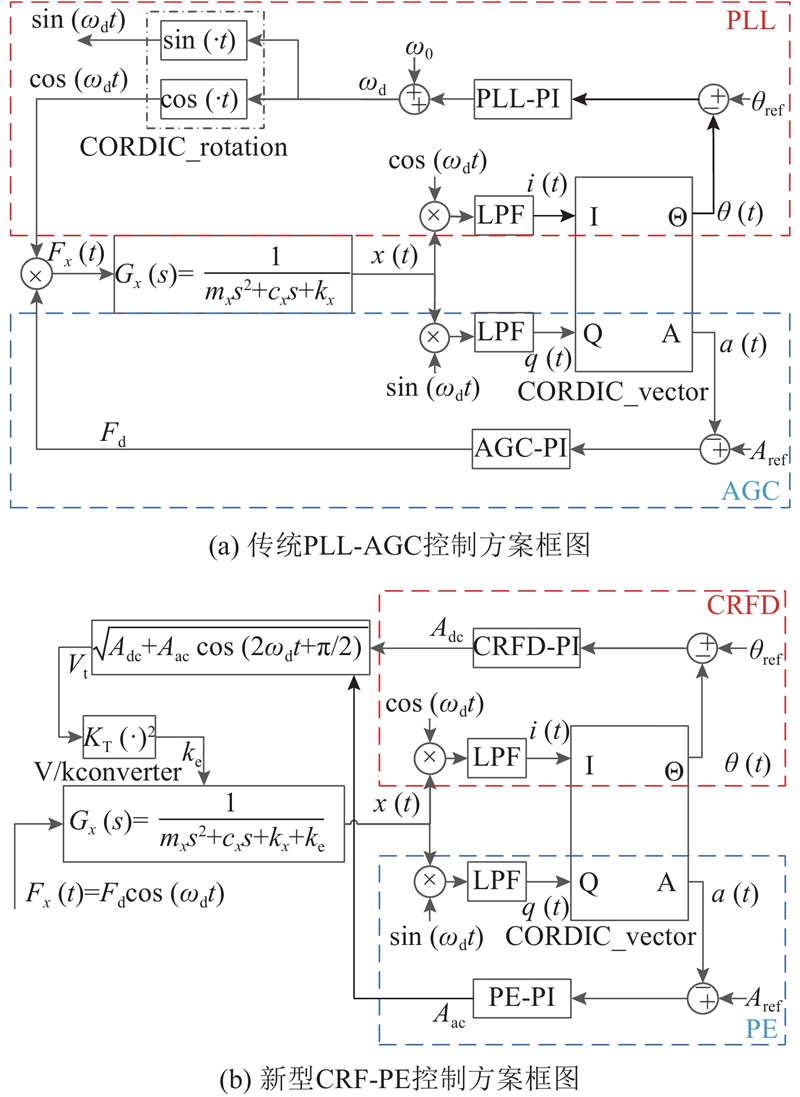
| 采用恒频参量激励的微机械陀螺驱动控制方案 |
林一羽( ),郑旭东*(),吴海斌,马志鹏,金仲和 ),郑旭东*(),吴海斌,马志鹏,金仲和 |
| 浙江大学 微小卫星研究中心,浙江 杭州 310027 |
|
| MEMS gyroscopes parametric excitation control scheme with constant resonant frequency |
| Yi-yu LIN(),Xu-dong ZHENG*(),Hai-bin WU,Zhi-peng MA,Zhong-he JIN |
| Micro-satellite Research Center, Zhejiang University, Hangzhou 310027, China |
引用本文:
林一羽,郑旭东,吴海斌,马志鹏,金仲和. 采用恒频参量激励的微机械陀螺驱动控制方案[J]. 浙江大学学报(工学版), 2019, 53(9): 1795-1804.
Yi-yu LIN,Xu-dong ZHENG,Hai-bin WU,Zhi-peng MA,Zhong-he JIN. MEMS gyroscopes parametric excitation control scheme with constant resonant frequency. Journal of ZheJiang University (Engineering Science), 2019, 53(9): 1795-1804.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2019.09.019
或
http://www.zjujournals.com/eng/CN/Y2019/V53/I9/1795
|
| 1 |
NORTHEMANN T, MAURER M, ROMBACH S, et al. Phase-locked drive loop with amplitude regulation based on phase-shifting for gyroscope [C] // IEEE International Conference Solid-State Sensors, Actuatrors, and Microsystems (Transducers). Beijing: IEEE, 2011: 16-19.
|
| 2 |
OBOE R, ANTONELLO R, LASALANDRA E, et al Control of a Z-axis MEMS vibrational gyroscope [J]. IEEE/ASME Transactions on Mechatronics, 2005, 10 (4): 364- 370
doi: 10.1109/TMECH.2005.852437
|
| 3 |
CUI J, CHI X Z, DING H T, et al Transient response and stability of the AGC-PI closed-loop controlled MEMS vibratory gyroscopes[J]. Journal of Micromechanics and Microengineering, 2009, 19 (12): 125015
doi: 10.1088/0960-1317/19/12/125015
|
| 4 |
ZHU H J, JIN Z H, HU S C, et al. Drive mode control for MEMS gyroscopes with electrostatically tunable structure [C] // IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-Nano). Suzhou: IEEE, 2014: 273-276.
|
| 5 |
OROPEZA-RAMOS L A, TURNER K L. Parametric resonance amplification in a MEMGyroscope [C] // IEEE Sensors. Irvine: IEEE, 2005: 660-663.
|
| 6 |
HARISH K M, GALLACHER B J, BURDESS J S, et al Experimental investigation of parametric and externally forced motion in resonant MEMS sensors[J]. Journal of Micromechanics and Microengineering, 2008, 19 (1): 015021
|
| 7 |
KHIRALLAH K Parametric excitation, amplifica-tion, and tuning of MEMS folded-beam comb drive oscillator[J]. Journal of Microelectromechanical Systems, 2013, 22 (2): 318- 330
doi: 10.1109/JMEMS.2012.2221156
|
| 8 |
NITZAN S H, ZEGA V, LI M, et al Self-induced parametric amplification arising from nonlinear elastic coupling in a micromechanical resonating disk gyroscope[J]. Scientific Reports, 2015, 5: 9036
doi: 10.1038/srep09036
|
| 9 |
GALLACHER B J, BURDESS J S, HARISH K M A control scheme for a MEMS electrostatic resonant gyroscope excited using combined parametric excitation and harmonic forcing[J]. Journal of Micromechanics and Microengineering, 2006, 16 (2): 320- 331
doi: 10.1088/0960-1317/16/2/017
|
| 10 |
SENKAL D, NG E J, HONG V, et al. Parametric drive of a toroidal MEMS rate integrating gyroscope demonstrating <20 PPM scale factor stability [C] // 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS). Estoril: IEEE, 2015: 29-32.
|
| 11 |
ZHANG X F, ZHAO H M, XU D C, et al. Research of suppressing electrical feed-through for resonant ring MEMS gyroscope based on parametric excitation [C] // 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). Xi' an: IEEE, 2018: 133-136.
|
| 12 |
HU S C, JIN Z H, ZHU H J, et al A Slot-structure MEMS gyroscope working at atmosphere with tunable electrostatic spring constant[J]. Journal of Microelectromechanical Systems, 2013, 22 (4): 909- 918
doi: 10.1109/JMEMS.2013.2250485
|
| 13 |
钱磊, 赵鹤鸣, 张晓峰, 等 基于参数激励的MEMS环式陀螺驱动方法与实现[J]. 智能与传感技术, 2018, 26 (11): 293- 302
QIAN Lei, ZHAO He-ming, ZHANG Xiao-feng, et al Improvement of MEMS gyroscope driving method based on parametric excitation[J]. Computer Measurement and Control, 2018, 26 (11): 293- 302
|
| 14 |
RUGAR D, GRUTTER P Mechanical parametric amplification and thermomechanical noise squeezing[J]. Physical Review Letters, 1991, 67 (6): 699- 702
doi: 10.1103/PhysRevLett.67.699
|
| 15 |
WU H B, ZHENG X D, LIN Y Y, et al. A novel amplitude-phase information extraction architecture for MEMS vibratory gyroscopes using a modified double side-band demodulation configuration [C] // 2018 IEEE Sensors. New Delhi: IEEE, 2018: 1134-1137.
|
| 16 |
ZHENG X, D LIU S Q, LIN Y Y, et al An improved phase-robust configuration for vibration amplitude-phase extraction for capacitive MEMS gyroscopes[J]. Micromachines, 2018, 9 (7): 362
doi: 10.3390/mi9070362
|
| 17 |
LIN Y Y, ZHENG X D, LIU S Q, et al Temperature-dependence improvement for a MEMS gyroscope using triangular-electrode based capacitive detection method[J]. IET Micro & Nano Letters, 2017, 12 (11): 828- 833
|
| 18 |
WALTHER A, BLANC C L, DELORME N, et al Bias contributions in a MEMS tuning fork gyroscope[J]. Journal of Microelectromechanical Systems, 2013, 22 (2): 303- 308
doi: 10.1109/JMEMS.2012.2221158
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|