| 机械与能源工程 |
|


|
|
|
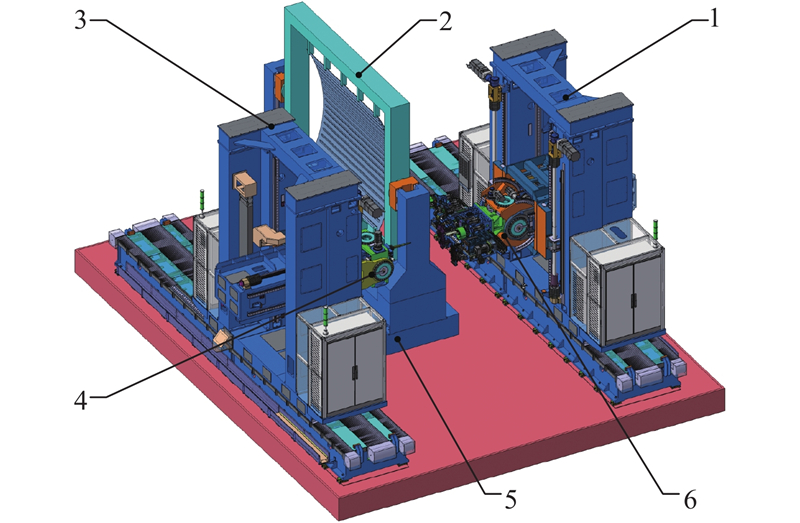
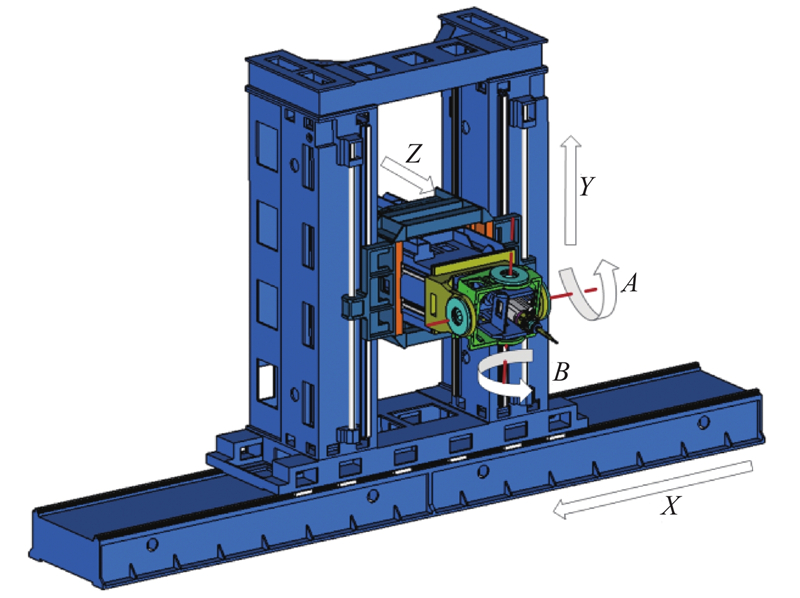
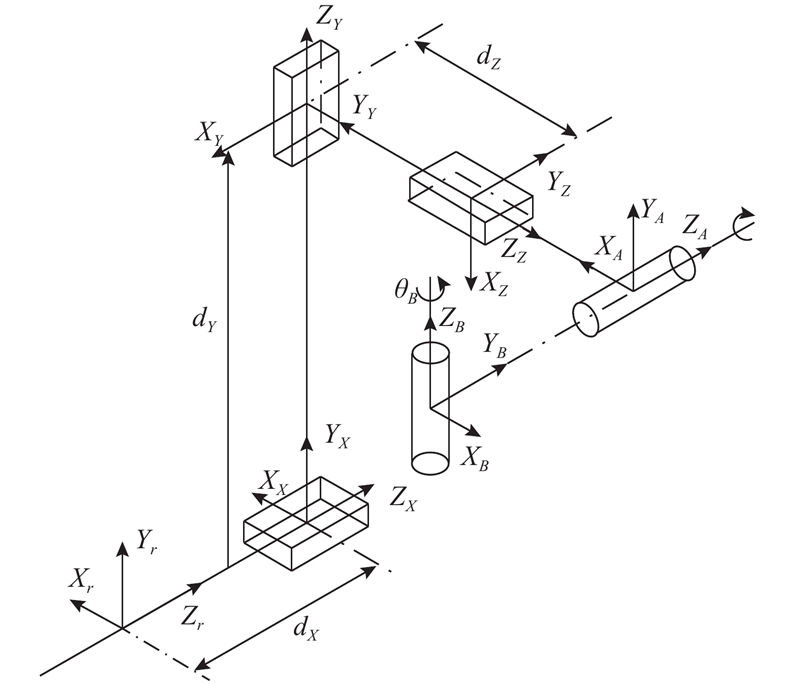
| 卧式双机联合自动钻铆系统综合刚度研究 |
蒋君侠( ),董琛,边晨,董辉跃 ),董琛,边晨,董辉跃 |
| 浙江大学 机械工程学院,浙江 杭州 310027 |
|
| Investigation on general stiffness of automatic horizontal dual-machine cooperative drilling and riveting system |
| Jun-xia JIANG(),Chen DONG,Chen BIAN,Hui-yue DONG |
| School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China |
引用本文:
蒋君侠,董琛,边晨,董辉跃. 卧式双机联合自动钻铆系统综合刚度研究[J]. 浙江大学学报(工学版), 2019, 53(6): 1110-1118.
Jun-xia JIANG,Chen DONG,Chen BIAN,Hui-yue DONG. Investigation on general stiffness of automatic horizontal dual-machine cooperative drilling and riveting system. Journal of ZheJiang University (Engineering Science), 2019, 53(6): 1110-1118.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2019.06.010
或
http://www.zjujournals.com/eng/CN/Y2019/V53/I6/1110
|
| 1 |
杜兆才, 姚艳彬, 王健 机器人钻铆系统研究现状及发展趋势[J]. 航空制造技术, 2015, (4): 26- 31
DU Zhao-cai, YAO Yan-bin, WANG Jian Research status and development trends of robot drilling and riveting system[J]. Aeronautical Manufacturing Technology, 2015, (4): 26- 31
|
| 2 |
卜泳, 许国康, 肖庆东 飞机结构件的自动化精密制孔技术[J]. 航空制造技术, 2009, (24): 61- 64
BU Yong, XU Guo-kang, XIAO Qing-dong Automatic precision drilling technology of aircraft structural part[J]. Aeronautical Manufacturing Technology, 2009, (24): 61- 64
doi: 10.3969/j.issn.1671-833X.2009.24.011
|
| 3 |
张辉 飞机装配设备及供应商一览[J]. 航空制造技术, 2008, (11): 71- 73
ZHANG Hui Introduction of aircraft assembly equipment and suppliers[J]. Aeronautical Manufacturing Technology, 2008, (11): 71- 73
doi: 10.3969/j.issn.1671-833X.2008.11.014
|
| 4 |
LUM N, LUO Q E7000 ARJ-manual flexible tooling for horizontal riveting system[J]. SAE International Journal of Aerospace, 2014, 7 (2): 241- 245
doi: 10.4271/2014-01-2250
|
| 5 |
王珉, 陈文亮, 郝鹏飞, 等 飞机数字化自动钻铆系统及其关键技术[J]. 航空制造技术, 2013, (Z1): 80- 83
WANG Min, CHEN Wen-liang, HAO Peng-fei, et al Lightweight automatic drilling system and key technology for aircraft[J]. Aeronautical Manufacturing Technology, 2013, (Z1): 80- 83
|
| 6 |
喻龙, 章易镰, 王宇晗, 等 飞机自动钻铆技术研究现状及其关键技术[J]. 航空制造技术, 2017, (9): 16- 25
YU Long. ZHANG Yi-lian, WANG Yu-han, et al. Research status of aircraft automatic drilling and riveting system and its key technology[J]. Aeronautical Manufacturing Technology, 2017, (9): 16- 25
|
| 7 |
赵辉. 基于UMAC的自动钻铆机控制系统研究与开发[D]. 南京: 南京航空航天大学, 2014: 3–13.
ZHAO Hui. Research automatic control system of drilling and riveting machine based on UMAC[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014: 3–13.
|
| 8 |
KIM B H, YI B J, OH S R, et al Non-dimensionalized performance indices based optimal grasping for multi-fingered hands[J]. Mechatronics, 2004, 14: 255- 280
doi: 10.1016/S0957-4158(03)00039-4
|
| 9 |
SALGADO M A, LACALLE L N L D, LAMIKIZ A, et al Evaluation of the stiffness chain on the deflection of end-mills under cutting forces[J]. International Journal of Machine Tools and Manufacture, 2005, 45 (6): 727- 739
|
| 10 |
闫蓉, 陈威, 彭芳瑜, 等 多轴加工系统闭链刚度场建模与刚度性能分析[J]. 机械工程学报, 2012, 48 (1): 177- 184
YAN Rong, CHEN Wei, PENG Fang-yu, et al Closed-loop stiffness modeling and stiffness index analysis for multi-axis machining system[J]. Journal of Mechanical Engineering, 2012, 48 (1): 177- 184
|
| 11 |
GAO X, LI B, HONG J, et al Stiffness modeling of ma-chine tools based on machining space analysis[J]. The International Journal of Advanced Manufacturing Technology, 2016, 86 (5-8): 1- 14
|
| 12 |
吴石, 李荣义, 刘献礼, 等 复杂曲面模具加工系统综合刚度场建模与分析[J]. 机械工程学报, 2016, 52 (23): 189- 198
WU Shi, LI Rong-yi, LIU Xian-li, et al The Modeling and analysis about comprehensive stiffness field of complex curved surface mould processing system[J]. Journal of Mechanical Engineering, 2016, 52 (23): 189- 198
|
| 13 |
张启祥. 飞机壁板自动钻铆机送钉系统技术研究[D]. 杭州: 浙江大学, 2018: 7–13.
ZHANG Qi-xiang. Research of the rivet feeding system technology of aircraft panel drilling and riveting ma-chine[D]. Hangzhou: Zhejiang University, 2018: 7–13.
|
| 14 |
吴少帅. 飞机壁板自动钻铆过程变形分析[D]. 杭州: 浙江大学, 2017: 53–59.
WU Shao-shuai. Research on deformation analysis of automatic drilling and riveting technology of aircraft sheet [D]. Hangzhou: Zhejiang University, 2017: 53–59.
|
| 15 |
蔡自兴. 机器人学[M]. 北京: 清华大学出版社, 2000: 38-105.
|
| 16 |
熊有伦, 丁汉, 刘恩沧, 等. 机器人学[M]. 北京: 机械工业出版社. 1993: 54–81.
|
| 17 |
ALICI G, SHIRINAZDEH B Enhanced stiffness modeling, identification and characterization for robot manipulators[J]. IEEE Transactions on Robotics, 2005, 21 (4): 554- 564
doi: 10.1109/TRO.2004.842347
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|