| 计算机与控制工程 |
|


|
|
|
| 集中式光伏电站巡检无人机视觉定位与导航 |
席志鹏( ),楼卓,李晓霞,孙艳,杨强*(),颜文俊 ),楼卓,李晓霞,孙艳,杨强*(),颜文俊 |
| 浙江大学 电气工程学院,浙江 杭州 310027 |
|
| Vision-based localization and navigation for UAV inspection in photovoltaic farms |
| Zhi-peng XI(),Zhuo LOU,Xiao-xia LI,Yan SUN,Qiang YANG*(),Wen-jun YAN |
| College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China |
引用本文:
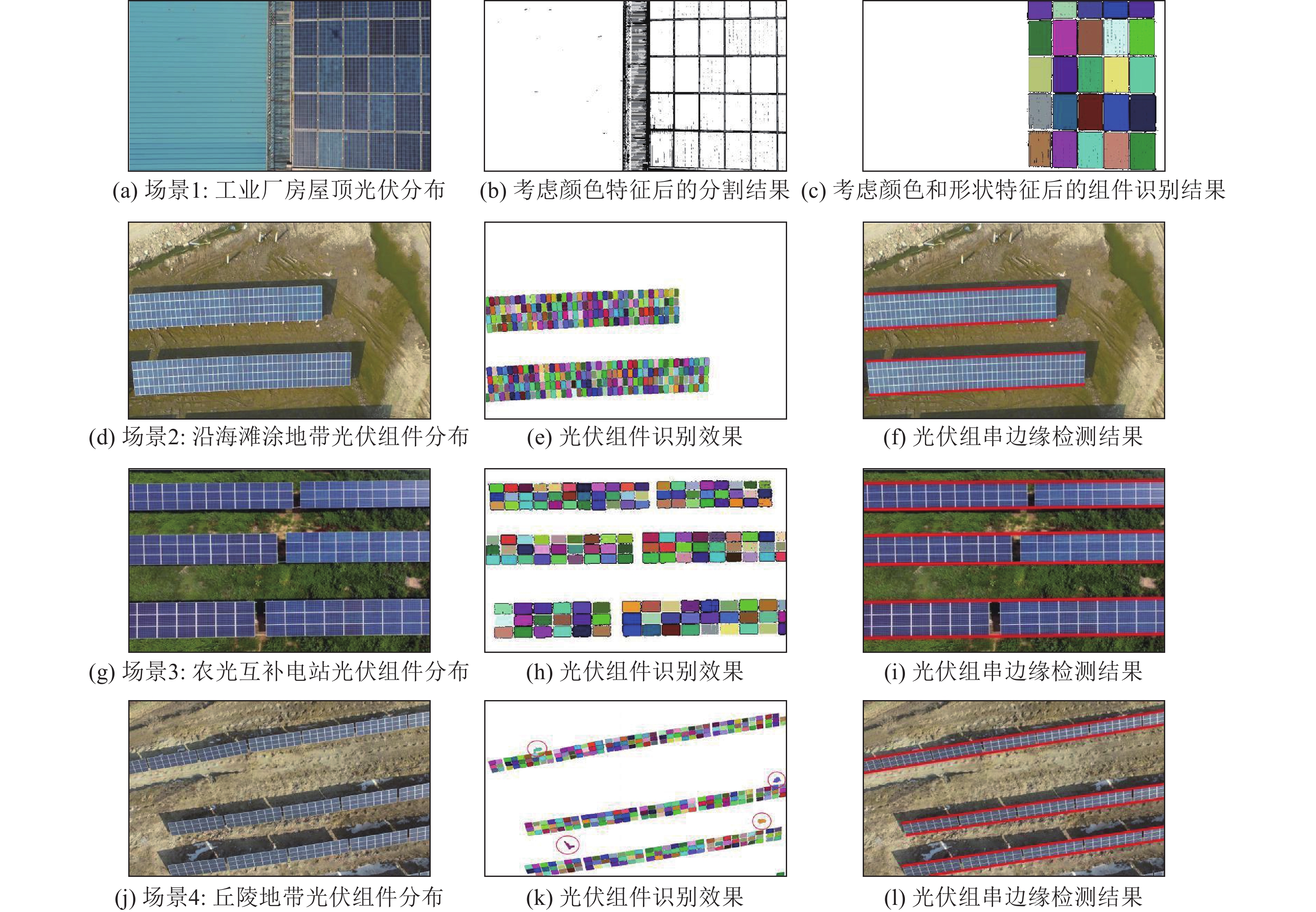
席志鹏,楼卓,李晓霞,孙艳,杨强,颜文俊. 集中式光伏电站巡检无人机视觉定位与导航[J]. 浙江大学学报(工学版), 2019, 53(5): 880-888.
Zhi-peng XI,Zhuo LOU,Xiao-xia LI,Yan SUN,Qiang YANG,Wen-jun YAN. Vision-based localization and navigation for UAV inspection in photovoltaic farms. Journal of ZheJiang University (Engineering Science), 2019, 53(5): 880-888.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2019.05.008
或
http://www.zjujournals.com/eng/CN/Y2019/V53/I5/880
|
| 1 |
国家能源局. 国家能源局新闻发布会介绍2017年度相关能源情况等[EB/OL]. (2018-01-24)[2018-06-20]. http://www.nea.gov.cn/2018-01/24/c_136921015.htm.
|
| 2 |
YANG T W, YIN H, RUAN Q Q, et al. Overhead power line detection from UAV video images [C]// Mechatronics and Machine Vision in Practice. Auckland: IEEE, 2013: 74-79.
|
| 3 |
SARAPURA J A, ROBERTI F, CARELLI R, et al. Passivity based visual servoing of a UAV for tracking crop lines [C]// XVII Workshop on Information Processing and Control. Mar del Plata: IEEE, 2017: 1-6.
|
| 4 |
BRAND?O A S, MARTINS F N, SONEGUETTI H B. A vision-based line following strategy for an autonomous UAV [C]// International Conference on Informatics in Control, Automation and Robotics. Colmar: IEEE, 2015: 314-319.
|
| 5 |
HUANG H, ZHOU H, QIN H D, et al. Underwater vehicle visual servo and target grasp control [C]// IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2017: 1619-1624.
|
| 6 |
HWANG C L, HUANG H H. Experimental validation of a car-like automated guided vehicle with trajectory tracking, obstacle avoidance, and target approach [C]// Conference of the IEEE Industrial Electronics Society. Beijing: IEEE, 2017: 2858-2863.
|
| 7 |
MARTINEZ C, SAMPEDRO C, CHAUHAN A, et al. Towards autonomous detection and tracking of electric towers for aerial power line inspection [C]// International Conference on Unmanned Aircraft Systems. Orlando: IEEE, 2014: 284-295.
|
| 8 |
LIU Y S, WANG Q X, HU H S, et al A novel real-time moving target tracking and path planning system for a quadrotor UAV in unknown unstructured outdoor scenes[J]. IEEE Transactions on Systems Man and Cybernetics Systems, 2018, 1- 11
|
| 9 |
LEIRA F S, JOHANSEN T A, FOSSEN T I. A UAV ice tracking framework for autonomous sea ice management [C]// International Conference on Unmanned Aircraft Systems. Miami: IEEE, 2017: 581-590.
|
| 10 |
YAN F L, LI B Q, SHI W X, et al Hybrid visual servo trajectory tracking of wheeled mobile robots[J]. IEEE Access, 2018, 6: 24291- 24298
doi: 10.1109/ACCESS.2018.2829839
|
| 11 |
XIAO S L, LI Y M Visual servo feedback control of a novel large working range micro manipulation system for microassembly[J]. Journal of Microelectromechanical Systems, 2014, 23 (1): 181- 190
doi: 10.1109/JMEMS.2013.2268849
|
| 12 |
ZHANG D, WU F J, LI X X, et al. Aerial image analysis based on improved adaptive clustering for photovoltaic module inspection [C]// International Smart Cities Conference. Wuxi: IEEE, 2017: 1-6.
|
| 13 |
WU F J, ZHANG D, LI X X, et al. Aerial image recognition and matching for inspection of large-scale photovoltaic farms [C]// Smart Cities Conference. Wuxi: IEEE, 2017: 1-6.
|
| 14 |
初广丽, 张伟, 王延杰, 等 基于机器视觉的水果采摘机器人目标识别方法[J]. 中国农机化学报, 2018, (2): 83- 88
CHU Guang-li, ZHANG Wei, WANG Yan-jie, et al A method of fruit picking robot target identification based on machine vision[J]. Journal of Chinese Agricultural Mechanization, 2018, (2): 83- 88
|
| 15 |
LI X H, ZHAO Y, ZHANG J, et al. A hybrid pso algorithm based flight path optimization for multiple agricultural UAVs [C]// International Conference on TOOLS with Artificial Intelligence. San Jose: IEEE, 2017: 691-697.
|
| 16 |
高海涛. UUV循迹跟踪与环境最优控位方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
GAO Hai-Tao. Research on UUV path following and weather optimal dynamic position [D]. Harbin: Harbin Engineering University, 2014.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|