


为兼顾折纸抓手的简单、紧凑设计与大面积贴合抓取能力,受蛇类缠绕运动的启发,提出一种基于折纸结构的仿生软体抓手。该抓手能够实现螺旋缠绕式抓取,在保持整体结构轻量、紧凑的同时,实现了对物体表面的大范围自适应包裹。
1 折纸抓手的设计
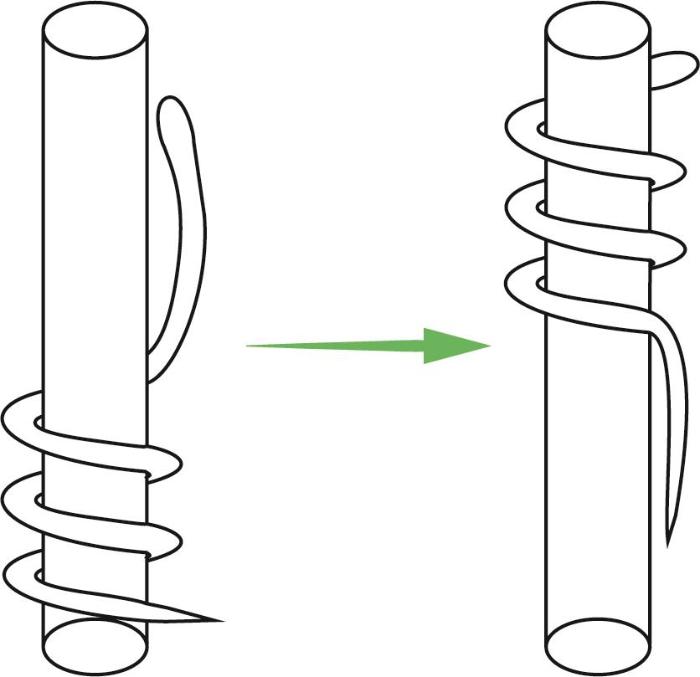
蛇类在攀爬树干或绞杀猎物时,会利用身体缠绕来实现移动或捕食。其攀爬运动的一种典型模式为手风琴式收缩:首先,身体后半段缠绕树干,以提供稳固支撑;随后,将身体前半段向前伸展并探索新的支撑点;待前端固定后,后半段身体收缩跟进,从而实现在垂直面上的高效移动(如图1所示)。蛇类独特的缠绕行为为折纸抓手的设计提供了灵感。与蛇的身躯类似,该折纸抓手采用长条状结构,能够在电机驱动下实现螺旋式缠绕运动,逐步包裹并紧密贴合目标物体表面,从而实现稳定且自适应的抓持效果。
图1
1.1 结构设计
图2

驱动细绳穿过各折纸单元上的预置孔道,穿绕方式如图3所示。细绳依次绕过每个折纸单元间的折痕,通过定向约束,限制各单元仅能沿单一方向转动。该设计确保了在细绳牵引过程中,所有折纸单元按预定方向协同折叠,进而实现整体结构的螺旋缠绕。
图3

1.2 折叠原理
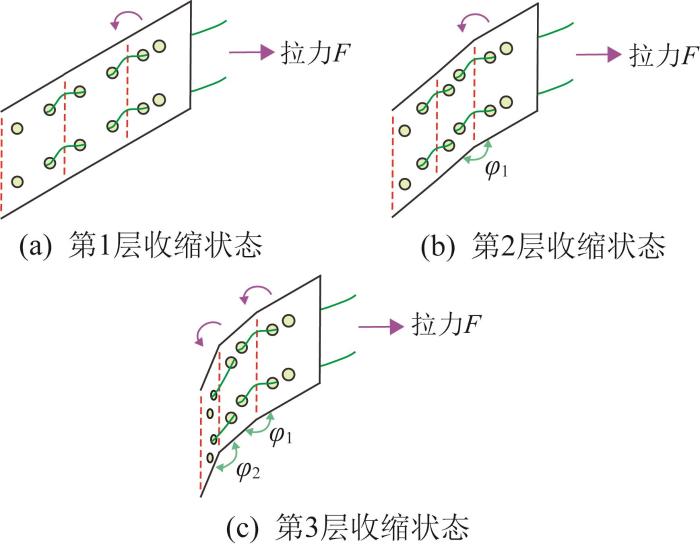
折纸抓手的设计与运动方式均模仿蛇类的缠绕机制。其由一系列平行四边形的折纸单元构成,细绳穿过各单元的预置孔道。而由于细绳在每个折痕处的绕行方式相同,所有折纸单元只能向同一侧翻折。如图4(a)所示,驱动机构通过收紧细绳施加拉力F。细绳由初始松弛状态进入第1层收缩状态,此时细绳紧贴折纸表面,但折纸单元尚未翻折。随着拉力F持续作用,细绳进一步收缩,第2个折纸单元开始翻折,与第1个折纸单元之间形成夹角(φ1),如图4(b)所示。第2个折纸单元在细绳拉力作用下完成翻折并贴紧物体,该折痕处细绳进入第2层收缩状态,即折痕两侧孔间穿过的绳长固定,单元间夹角保持不变。随后,如图4(c)所示,拉力F继续作用,第3个折纸单元开始翻折,细绳进一步收缩,使其与第2个单元之间形成夹角(φ2),并最终贴紧物体。该过程依次进行,直至末端折纸单元完成翻折并贴紧目标物体,此时细绳达到最大收缩状态,无法进一步收紧,折纸抓手锁定抓取形态,直至抓取过程结束。
图4
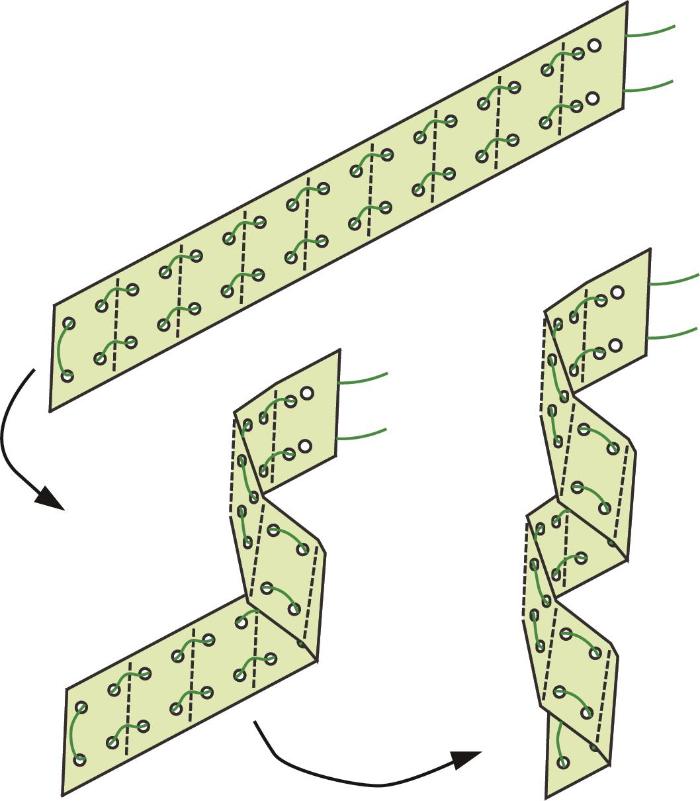
如图5所示,在折叠过程中,各平行四边形折纸单元沿折痕翻转,多个单元的协同动作形成螺旋向下的缠绕形态,与蛇类缠绕高度相似。该缠绕过程具有被动自适应特性:可根据目标物体的尺寸被动调整相邻折纸单元之间的夹角大小,进而影响缠绕圈数,当物体尺寸较大时缠绕圈数减少,较小时则相应增加。
图5
1.3 折叠参数分析
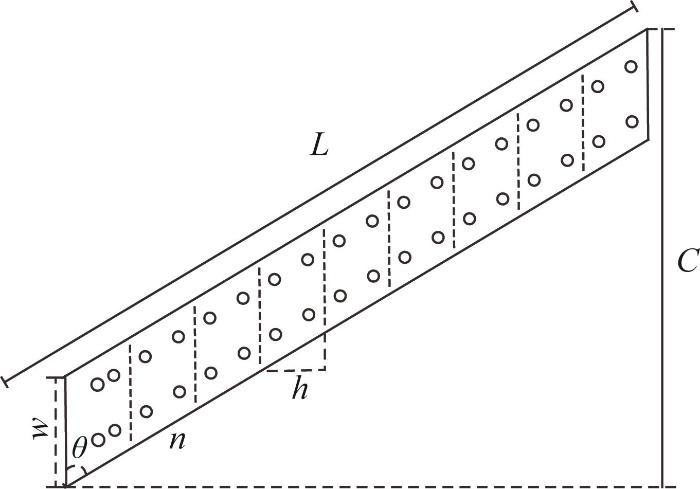
折纸抓手的几何参数如图6所示,包括折纸端到端长度L、折纸斜边宽度w、折纸单元邻边夹角
图6
折纸抓手可抓取物体(圆柱体)的直径范围受其几何参数约束,主要取决于折纸单元的数目n与高度h,最小抓取直径Dmin和最大抓取直径Dmax如图7所示。其中,Dmin仅由折纸单元高度h决定。在最小直径抓取状态下,折纸结构闭合截面呈正三角形,其内切圆直径即为Dmin。而在最大直径抓取状态下,折纸结构闭合截面呈正n边形,其内切圆直径即为Dmax。
图7
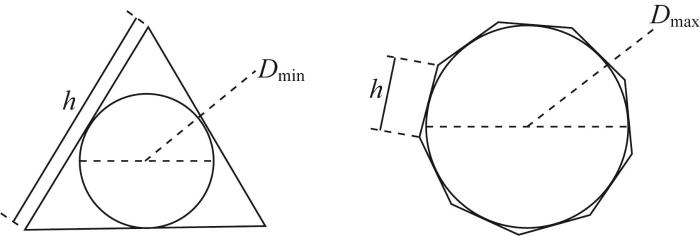
图7
折纸抓手的最小和最大抓取直径
Fig.7
Minimum and maximum grasping diameters of origami gripper
折纸抓手的抓取直径D满足如下关系:
式中:N为折纸抓手绕物体1圈所需要的折纸单元数目。
当N=3时,D为最小抓取直径Dmin;当N=n时,D为最大抓取直径Dmax。
折纸向下缠绕长度C满足如下关系:
在折纸抓手未折叠的初始状态下,如图8(a)所示,以第1个折纸单元为基准,第2个折纸单元的纵向伸出长度为c1,第3个折纸单元又在第2个折纸单元的基础上伸出长度c2,且满足c1=c2=c。因此,整个折纸结构展开后的纵向总伸出长度为第1个折纸单元的长度与第2~n个折纸单元逐级增加的伸出长度(n-1)c之和。
图8
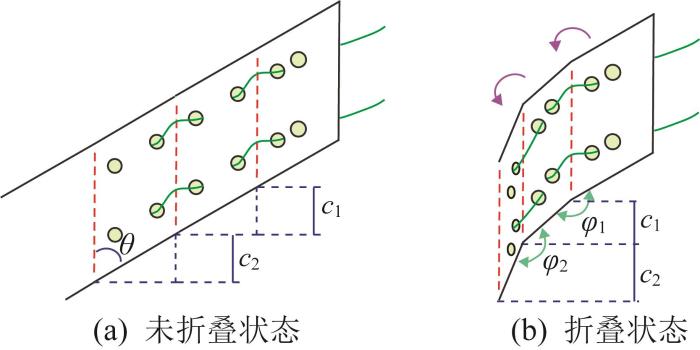
当折纸抓手进行缠绕抓取时,如图8(b)所示,仍以第1个折纸单元为基准,第2个折纸单元发生翻折,与第1个折纸单元形成夹角
增加折纸抓手的向下缠绕长度C,可在抓取较长物体时,使接触面更均匀地分散于物体表面,避免应力集中于局部,从而显著提高抓取稳定性。在保持折纸单元边长不变的情况下,仅通过调整其邻边夹角即可有效改变长度C。如图9所示,夹角减小将导致折纸向下缠绕长度C大幅增加。当折纸单元邻边夹角为30°时,折纸抓手呈细长形,有效缠绕长度最大;当夹角增大至75°时,其形态更为紧凑,缠绕长度相应减短。
图9
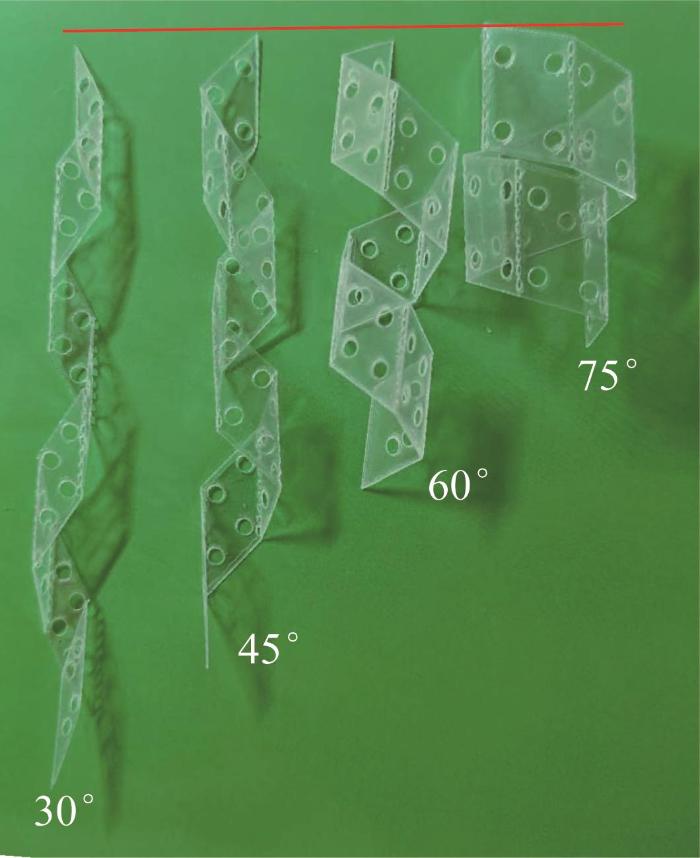
图9
不同折纸单元邻边夹角的折纸抓手形态
Fig.9
Origami gripper morphologies with different inter-unit angles
折叠间隙X(如图10所示)定义为折纸抓手在折叠状态下相邻2个折纸单元对应点之间的横向间距。以折纸单元1为基准,折纸单元2为折纸结构缠绕物体1周后的起始单元。折叠间隙X满足如下关系:
图10
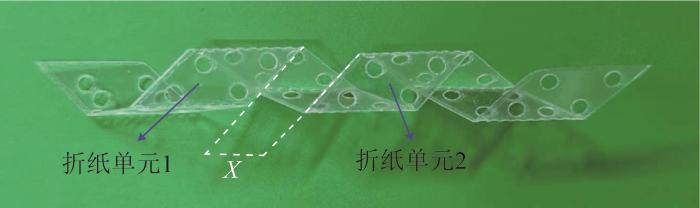
图11
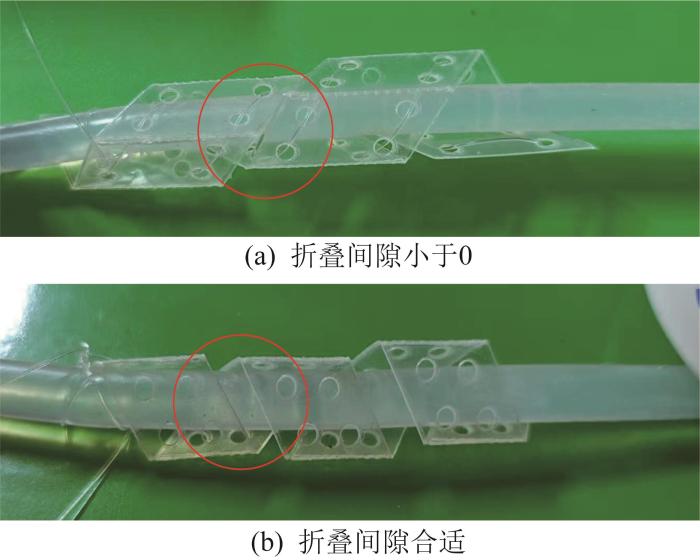
图11
折叠间隙对折纸抓手折叠状态的影响
Fig.11
Influence of folding gap on folding state of origami gripper
1.3 摩擦力对折纸抓取的影响
如图12(a)所示,细绳从折痕上方穿过。当对细绳施加拉力时,贯穿整条折纸抓手的细绳开始收缩,并与折纸单元上的孔壁接触,产生摩擦力。细绳直径为0.5 mm,孔直径为1.5 mm,由于细绳直径小于孔径,细绳仅与孔的一侧接触并产生摩擦力。如图12(b)所示,细绳仅通过孔壁与折纸抓手发生相互作用,在整个运动过程中不与折纸外表面接触,且始终贴靠于孔道右侧。由于细绳的穿绕方式,细绳在折痕两侧与孔壁接触形成夹角
图12
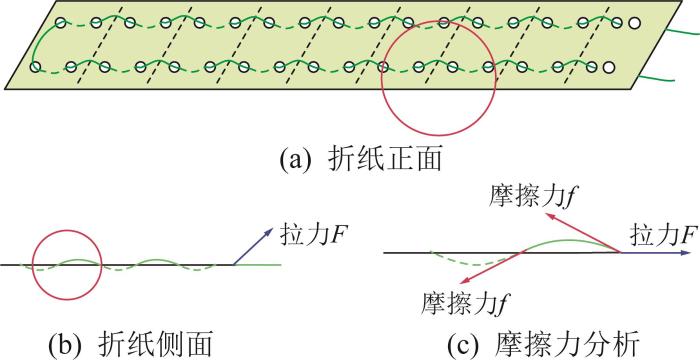
如图13所示,细绳在水平方向上受到的拉力F与各孔的摩擦力在水平方向上的分力大小相等:
图13
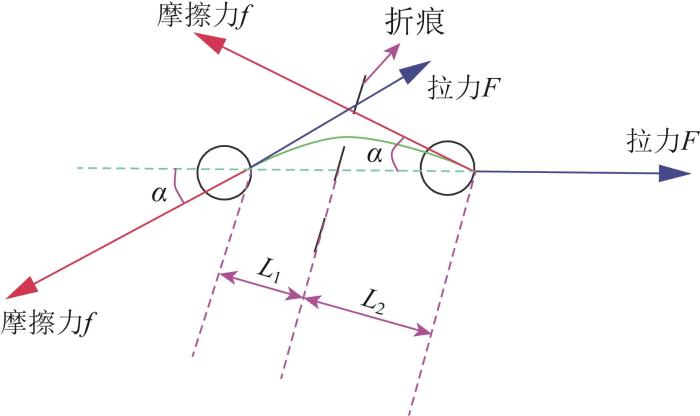
在竖直方向上,细绳在左侧孔和右侧孔受到的摩擦力分量大小相等、方向相反。令细绳与左侧孔接触点和折痕的距离为L1,细绳与右侧孔接触点和折痕的距离为L2,则左侧拉力的力矩为:
右侧摩擦力的力矩为:
在力矩作用下,相邻2个孔之间的折纸区域均有翻折的趋势,而由于折痕是折纸抓手的薄弱处,折纸在折痕处最先翻折;当增大拉力时,折纸沿折痕依次翻折。
细绳与孔壁的夹角
当增大折痕两侧孔间距时,同一折纸单元上的孔间距相应减小。这一几何变化产生了两方面的力学效应:一方面,增大了作用于折痕处的驱动力矩,使折痕区域更容易翻折;另一方面,减小了作用于折纸单元本体的弯矩,从而降低了单元的内部应力。因此,完成抓取动作所需的细绳拉力显著减小,同时有效降低了折纸单元在折叠过程中发生变形破坏的风险。
2 折纸抓手的抓取性能优化
2.1 抓取力测量
将折纸抓手安装于固定平台,使其抓持1根直径为7 mm的测试胶棒,胶棒另一端通过细绳连接至数显测力计,如图14所示。实验时,沿竖直方向缓慢向下拉动测力计,直至抓手发生滑移或完全脱离胶棒,记录此过程中测力计显示的最大值,并将其定义为该折纸抓手的最大抓取力。
图14

2.2 折纸厚度对抓取性能的影响
折纸抓手的材料厚度直接影响其螺旋缠绕时的整体结构刚度,进而对抓取性能产生影响。为探究该影响,选取厚度分别为0.050、0.075、0.100和0.125 mm的聚对苯二甲酸乙二醇酯(polyethylene terephthalate, PET)薄膜制作折纸抓手,并在相同实验条件下进行抓取力测量。得到的最大抓取力分别为0.23、0.42、5.43和7.27 N,表明折纸抓手的最大抓取力随折纸厚度的增加而增大。
实验表明,在一定范围内增加折纸厚度有助于提高折纸结构的刚性,从而更有效地将驱动细绳的拉力转化为对物体的夹持力。若折纸厚度不足,则折纸结构在拉力作用下易发生过度变形,导致缠绕行为不充分、抓取性能不理想;若厚度过大,则会阻碍折纸结构的正常折叠与缠绕运动,同样会对抓取性能产生不利影响。
2.3 折纸斜边宽度对抓取性能的影响
折纸抓手通过包裹物体表面实现稳定抓持,其斜边宽度直接影响与物体的接触面积和包裹程度,是决定抓取性能的关键参数之一。为探究斜边宽度对抓取性能的影响,选取斜边宽度为16、18、20、22及24 mm的折纸结构,在相同条件下进行抓取力测量,得到的最大抓取力分别为6.56、6.91、7.27、9.13和5.45 N。结果表明,斜边宽度为22 mm的折纸抓手表现出最优的抓取性能。若折纸宽度过大,如24 mm宽度的折纸抓手在折叠过程中,其相邻单元之间发生重叠,相互干涉,从而阻碍结构的正常折叠与缠绕运动,导致抓手无法充分贴合目标物体表面,抓取性能反而下降。
2.4 折纸长度对抓取性能的影响
折纸抓手的长度是决定其抓取物体时包裹与覆盖范围的关键因素之一。设计由7、9和11个折纸单元构成的3种抓手(其总长度分别为95.2、122.4和149.6 mm),测量得到的最大抓取力分别为6.58、7.27和9.03 N。通过实验发现,折纸单元数量的增加显著提升了抓取适应性和稳定性。此举扩大了折纸抓手与物体的接触面积,从而增强了其对物体的包络能力,优化了抓取性能,但过度增加长度可能导致驱动效率降低。
2.5 折纸单元邻边夹角对抓取性能的影响
折纸单元为平行四边形,改变平行四边形的邻边夹角
3 折纸抓手的抓取测试与分析
折纸抓手通过电机驱动绕线轮转动,以螺旋缠绕方式对目标物体进行自适应抓取。如图15所示,该抓手对圆柱体、长方体和圆锥体等不同形状的物体均能实现有效抓取。其中,对等横截面的细长物体(如圆柱体和长方体)抓取性能最优。在这2类物体中,折纸抓手与圆柱体表面的贴合程度更高,因此抓取稳定性更高,承载能力也更强。
图15
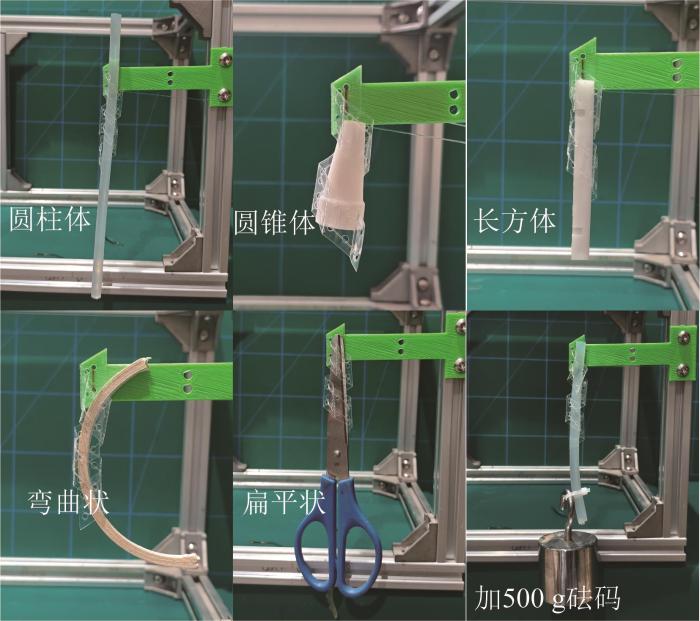
此外,该抓手对特殊形状的物体表现出良好的适应性,可被动适应多种物体外形变化,并成功抓取弯曲状和扁平状物体。即使在物体上额外添加质量为500 g的砝码,折纸抓手仍能稳定抓持,显示出优异的负载性能。
尽管条状气动软体机器人通过纤维缠绕约束,可以实现类蛇变形,并达到与折纸抓手相近的抓取性能,但两者在驱动机制和系统集成度上存在差异。折纸抓手通过单根细绳的线性牵引即可实现整个结构的顺序折叠与抓取,驱动点单一,系统简洁可靠。相比之下,气动软体机器人通常依赖空压机、阀路等复杂的气动系统,能耗较高,且在体积与集成度上不具优势。此外,气动软体机器人因其本体由弹性材料制成,在反复充放气的工作循环中,材料容易因疲劳而不可逆地形变、老化甚至开裂。一旦发生破损,往往需要更换整个软体段,维护成本高且难以重复使用。而折纸抓手的主体部分易于更换,维护成本更低。其以简单的折纸结构实现了对复杂形状的适应,同时保持了较大的包络接触面积,体现出显著优势。
4 结 论
受蛇类缠绕运动的启发,本文提出一种新型缠绕式折纸抓手,旨在兼顾大面积包络抓取与结构简洁性的双重需求。该折纸抓手能够在抓取过程中自适应包裹目标物体,在不增加结构复杂度的前提下,显著增大了接触面积,提升了抓取稳定性。
通过实验发现,当折纸厚度为0.125 mm,折纸单元夹角为60°,折纸单元斜边宽度为22 mm时,折纸抓手的抓取性能最优。根据物体大小调整折纸单元个数,可以改善缠绕效果,并提高抓取稳定性。该抓手结构紧凑,通过螺旋缠绕机制与物体形成大面积贴合接触。对于常见的圆柱形、锥形和矩形截面的物体,甚至一些特殊形状,如弯曲状、扁平状,抓取时均能被动、自适应地贴合物体。因此,其能够抓取和搬运远超自身重量的较大物体。实验中,折纸抓手可以轻松抓取质量为500 g的砝码,展现出较强的负载能力。该折纸抓手能高效地将驱动拉力转化为对多种形状物体的包络抓取力,在保持结构小型化的同时,实现了负载能力的显著提升,从而在抓取性能与紧凑设计间取得了优异平衡。这一结果为高性能折纸抓手的设计提供了新思路。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.191
参考文献
双驱动可变刚度柔性抓取机器人系统设计与实验研究
[D].
Design and experimental study of dual-actuated flexible grabber with variable stiffness
[D].
Bio-inspired deployable cable-driven origami gripper with variable finger length for space capture
[J].
Construction and analysis of a thick-panel origami gripper with soft joints based on square-twist origami tessellation
[J].
A flytrap-inspired bistable origami-based gripper for rapid active debris removal
[J].
Origami chomper‐based flexible gripper with superior gripping performances
[J].
Venus flytrap-inspired electromagnetically driven bistable gripper for fast envelope grasping
[J].
A bionic bird jumping grasping structure design based on stm32 development board control
[J].
细长果蔬采摘软体气动抓手设计与参数优化
[J].
Design and parameter optimization of soft pneumatic gripper for slender fruits and vegetables picking
[J].
Tendon driven bistable origami flexible gripper for high-speed adaptive grasping
[J].
A dual-morphing pneumatic origami gripper
[J].
Design and optimization of an origami gripper for versatile grasping and manipulation
[J].
基于折纸结构的收纳式软体抓手设计与试验
[J].
Origami-based soft gripper with high folding-unfolding ratio: theory and experiment analysis
[J].DOI:10.3901/jme.2024.05.051 [本文引用: 1]
Paper-based bistable origami gripper to make quadcopters multi-functional
[J].
Design of a foldable origami mechanism with helical motion inspired by the Resch Triangular Tessellation
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}