


软体机器人由软体材料制作而成。理论上其拥有无限的自由度,具有非结构化环境适应性好、制造成本低、人机交互安全性高等优点[1-2],被广泛应用于生物医疗[3-4]、灾难救援[5]、仿生机器人[6-7]、人体穿戴[8-9]等多种场景和领域。软体驱动器作为软体机器人的作动器,可以实现弯曲[10-11]、扭转[12-13]、伸缩[14]和膨胀[15]等基础运动。软体驱动器最初的设计灵感来源于软体生物。人们通过对章鱼、乌贼等无脊椎软体动物的仿生来制作软体驱动器 [16]。其常用的驱动方式有形状记忆合金驱动[17-18]、介电高弹性材料驱动[19-20]、化学驱动[21-22]、线驱动[23-24]和流体驱动[25]等。其中,流体驱动包括液体驱动和气体驱动,而气体驱动由于气源获取简单、清洁无污染等优点被广泛应用。
早期的气动软体驱动器可追溯到McKibben气动肌肉[26],其内部采用硅胶内胆,外部为纤维编织层,充气后内胆膨胀,纤维编织层抑制轴向伸长,使驱动器产生轴向缩短、径向膨胀的变形。利用McKibben气动肌肉的变形特点,刘庚[27]设计并制作了一种弯曲驱动器,通过在驱动器一侧设置限制层,抑制驱动器单侧轴向伸长,驱动器在充气时弯向限制层一侧,实现驱动器弯曲变形。孙沂琳等[28]设计并制作了一种多腔室弯曲驱动器,此驱动器上部为多腔室结构,下部为限制层,腔室端面为矩形且两端面平行,该腔室结构能有效降低驱动气压。李明鑫等[29]通过对竹节的仿生设计了一款半圆形端面弯曲驱动器,相较于矩形端面,该驱动器在相同气压下的弯曲角度更大。董虎等[30]设计并制作了一种仿真手,其多腔室弯曲驱动器端面形状为矩形,且两端面呈一定角度,将限制层设置在两腔室端面的背离端,使得驱动器在限制层的作用下实现弯曲。
现有的弯曲驱动器多是通过设置限制层或缠绕纤维丝来实现弯曲。此种结构制作难度大,而且纤维丝的存在会影响限制层的厚度,增大弯曲刚度而影响驱动器的弯曲角度。为了设计结构简单、制作方便、弯曲角度大的驱动器,本文设计了一种气动扇形腔室软体弯曲驱动器(以下简称驱动器),并基于Yeoh本构模型对驱动器的弯曲变形进行理论建模,得到了输入气压与弯曲角度的数学模型,并利用Abaqus有限元分析软件仿真分析了不同结构参数对驱动器弯曲性能的影响;设计并制作了驱动器,搭建实验平台测试了其在不同气压下的弯曲角度,并与仿真结果进行对比,来验证模型的准确性;基于驱动器设计了一种软体夹持器,测试了夹持器对不同尺寸、形状、质量的物体的夹持效果,验证了所设计弯曲驱动器和夹持器的实用性。
1 驱动器的结构
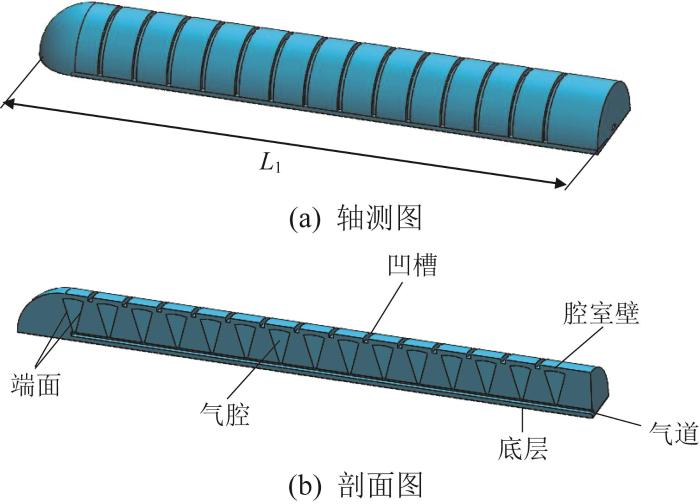
本文设计的气动扇形腔室软体弯曲驱动器如图1所示,L1为整体长度。驱动器为多腔室结构,截面为扇形,腔室端面为半圆形。驱动器腔室端面在工作气压的作用下产生径向分力,在不设置限制层的情况下也可以实现弯曲,因此结构更加简单,制作更加方便。
图1
2 驱动器弯曲变形理论模型
驱动器由超弹性材料制作而成,在气压作用下会产生几何非线性变形。为了评估驱动器的弯曲变形能力,需要建立驱动器弯曲变形理论模型。在建立模型时,由于驱动器在底层较薄时弯曲角度较小,沿弯曲方向伸长量较大,而当底层过厚时会增大弯曲刚度,也会产生阻抗力矩而对驱动器弯曲产生影响。为了便于建模,本文主要针对底层厚度适当、充气后沿弯曲方向伸长量较小的驱动器进行分析。在建模过程中,假设驱动器底层不可拉伸,只考虑驱动器主体的变形。首先需建立材料的本构关系模型。常见的超弹性本构模型有Neo-Hookean模型、Yeoh模型和Ogden模型等,本文采用Yeoh模型建立驱动器腔室变形时的应力与应变关系。结合力学平衡与能量守恒原理,推导出驱动器输入气压与弯曲角度之间的函数关系。
根据文献[31],Yeoh模型的应变能函数表示为:
式中:C10、C20、C30为材料系数,I1为应力张量的第一不变量,I1=λ12+λ22+λ32,λ1、λ2、λ3分别为材料轴向、周向、径向的伸长率。
轴向、周向、径向的名义主应力δi ( i=1, 2, 3)表示为:
式中:p为拉格朗日因子,λτ 为腔室壁伸长率。
当驱动器充气后,腔室端面变形量较小,所以可忽略驱动器充气后引起的端面变形。设径向应力δ3=0,代入
根据驱动器的结构特点,忽略周向应变λ2,即λ2=1。由于硅胶为不可压缩材料,有I3=(λ1 λ2 λ3)2=1。令λ1=λ,则各伸长率之间存在以下关系:
则可得:
联立
在
变形前后驱动器模型如图2所示。
图2
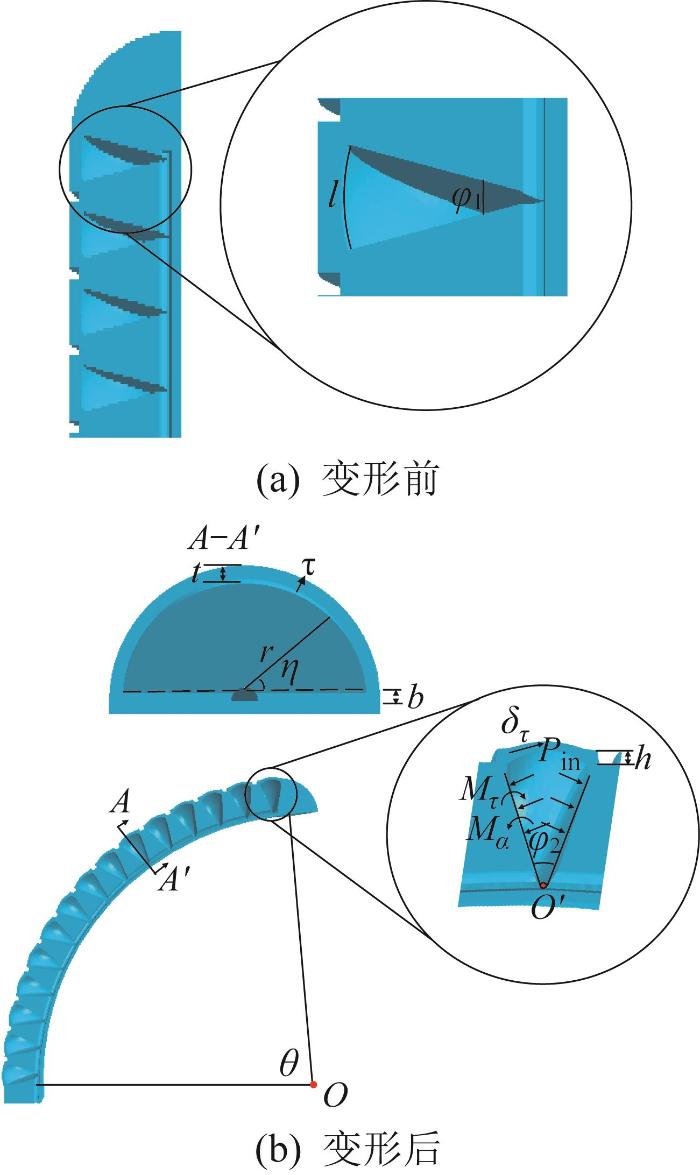
对驱动器腔室进行受力分析。以单个腔室为例,当驱动器充入气压后,其输入气压pin作用在腔室端面上,产生了关于O' 点的力矩Mα,腔室发生膨胀变形产生反向平衡力矩Mτ。则:
腔室端面为半圆形,气体压力均匀作用在端面上,则:
式中:r为腔室端面半径,η为腔室端面半径与水平线的夹角。
单个腔室端面受力如图2(b)所示,在气压作用下腔室壁伸长,则:
式中:
根据
平衡力矩Mτ 表示为:
式中:τ为腔室壁厚。
联立式(
3 驱动器弯曲变形有限元仿真
上文建立了驱动器输入气压与弯曲角度之间的函数关系。为了验证理论模型的准确性,利用Abaqus软件对驱动器弯曲变形进行仿真,并将仿真结果与矩形腔室驱动器进行对比。此外,改变驱动器的腔室端面半径、腔室壁厚、腔室端面夹角、凹槽深度、底层厚度等结构参数,仿真分析各参数对驱动器弯曲性能的影响。
3.1 驱动器的弯曲性能仿真分析
由于硅胶为超弹性材料,使用三阶Yeoh模型来描述其本构关系。通过拉伸实验得到硅胶的材料系数C10=0.090 036,C20=-0.003 880 6,C30=0.001 524。将驱动器模型进行四面体网格划分,将压力载荷作用于驱动器的腔室内表面,固定驱动器的充气端,对不同输入气压下驱动器的弯曲变形进行仿真,并将仿真结果与求解得到的理论值进行对比,结果如图3所示。
图3
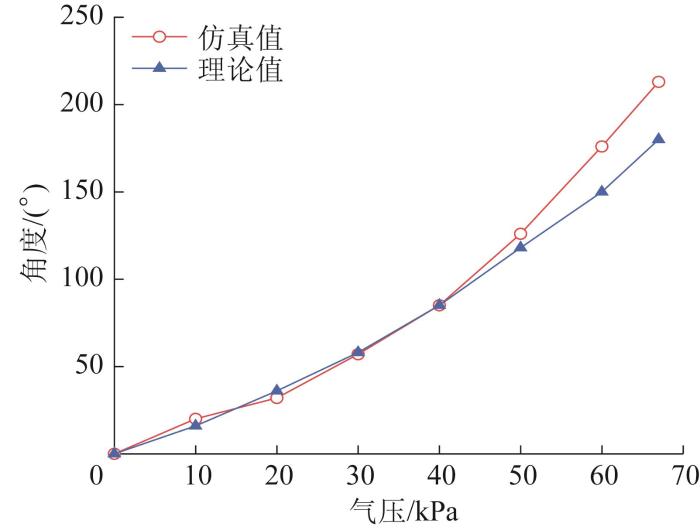
图3
驱动器弯曲角度的仿真值与理论值
Fig.3
Simulation and theoretical values of bending angle of driver
由图3可知,在不同输入气压下驱动器弯曲角度的仿真值与理论值基本吻合,尚存在一定误差,随着气压的增大,误差逐渐增大,最大为16°。原因可能是理论建模时只考虑了腔室壁轴向的应力和应变,忽略了径向膨胀变形。
3.2 不同腔室结构驱动器的弯曲性能对比
矩形腔室是目前使用最普遍的驱动器腔室结构。当矩形腔室驱动器的腔室端面面积、凹槽深度、底层厚度、腔室个数、腔室间距、腔室壁厚度、驱动器长度都与扇形腔室驱动器相同时,其弯曲性能对比如图4所示。
图4
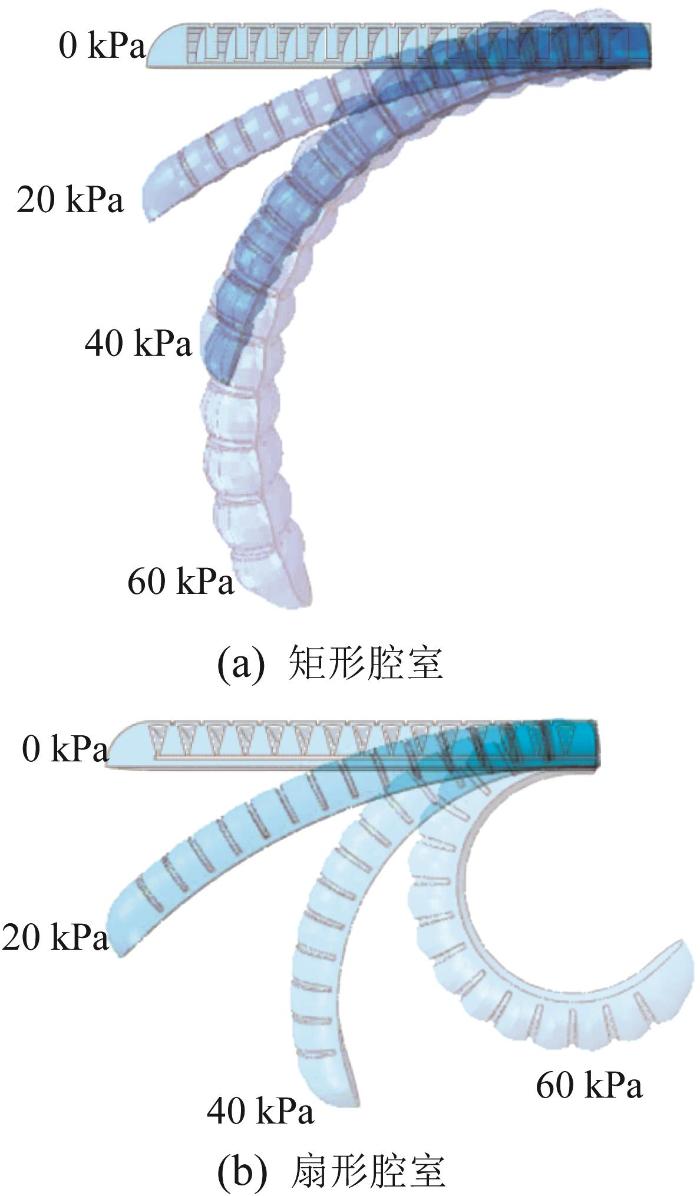
图4
不同腔室结构驱动器的弯曲性能对比
Fig.4
Comparison of bending performance of actuators with different chamber structures
由图4可知,扇形腔室驱动器随驱动气压增加弯曲角度不断增加,而矩形腔室驱动器在气压达到一定值后弯曲角度增大量减小。其原因是输入气压使得矩形腔室驱动器的腔室膨胀量增大,驱动器整体沿弯曲方向伸长,导致弯曲角度增加量减小。因此,在相同气压下,扇形腔室驱动器具有更好的弯曲性能。
3.3 驱动器结构参数对弯曲角度的影响
3.3.1 腔室端面半径对弯曲角度的影响
驱动器腔室端面半径越大,腔室端面面积越大,在气压作用下,腔室端面所受压力也越大,从而会影响驱动器的弯曲性能。设置腔室端面半径分别为7,8,9,10 mm,输入压力设置为0~40 kPa,压力增量为5 kPa,仿真分析不同腔室端面半径下驱动器的弯曲角度,结果如图5所示。
图5
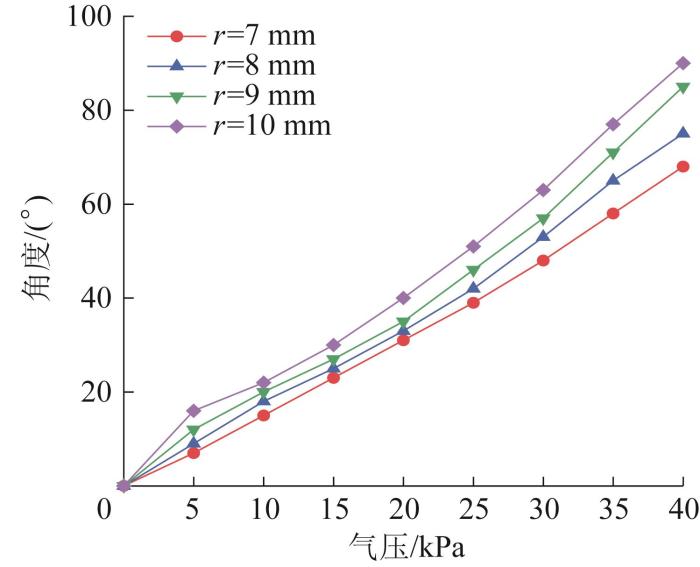
图5
不同腔室端面半径下驱动器的弯曲角度
Fig.5
Bending angle of actuator under different cavity end face radii
由图5可知,驱动器弯曲角度随着气压的增大而增大;在相同气压下,腔室端面半径越大,驱动器弯曲角度越大,弯曲性能越好。
3.3.2 腔室壁厚对弯曲角度的影响
驱动器利用腔室充气膨胀实现弯曲变形,弯曲程度对应着腔室膨胀后端面夹角的增加量,而腔室壁厚会影响腔室端面膨胀所需克服的阻力。考虑到制作难度,腔室壁厚不宜过小,设置腔室壁厚分别为0.5,1.0,1.5,2.0 mm,输入压力设置为0~40 kPa,压力增量为5 kPa,仿真分析不同腔室壁厚下驱动器的弯曲角度,结果如图6所示。
图6
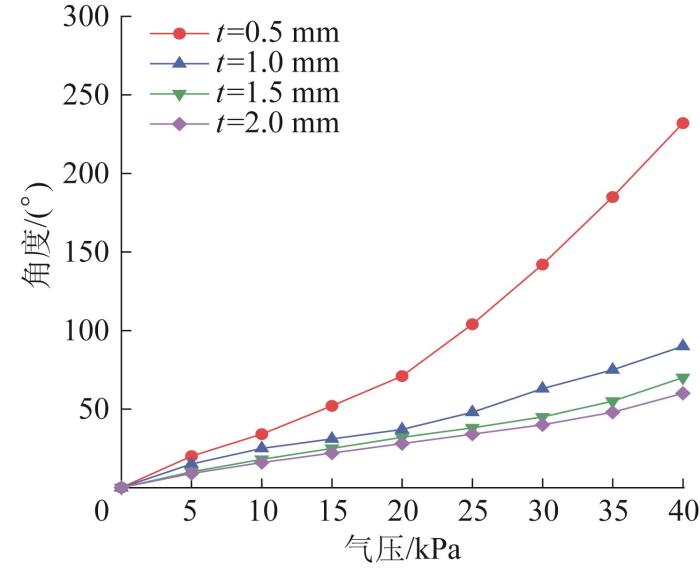
图6
不同腔室壁厚下驱动器的弯曲角度
Fig.6
Bending angle of actuator under different chamber wall thicknesses
由图6可知,腔室壁厚越小,在气压作用下驱动器越易变形。所以,腔室壁厚越小,驱动器弯曲性能越好。
3.3.3 腔室端面夹角对弯曲角度的影响
驱动器腔室端面夹角不同,则腔室充气后驱动器径向和轴向的受力会不同。设置腔室端面夹角分别为20°,25°,30°,输入压力设置为0~70 kPa,压力增量为10 kPa,仿真分析不同腔室端面夹角下驱动器的弯曲角度,结果如图7所示。
图7
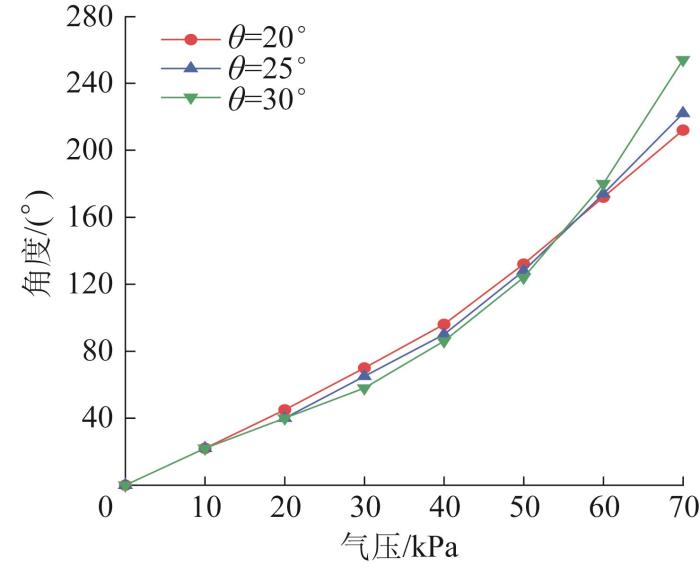
图7
不同腔室端面夹角下驱动器的弯曲角度
Fig.7
Bending angle of actuator under different cavity end face radii
由图7可知:当输入气压为0~55 kPa时,腔室端面夹角为20°的驱动器的弯曲性能最好,而气压增加到55 kPa之后,腔室端面夹角为30°的弯曲性能最好。当腔室端面夹角较小时,在端面上的轴向气压较大,可以使腔室快速膨胀。当腔室端面夹角较大时,轴向分力较小,气压开始作用会影响弯曲角度变小,而达到一定角度后径向分力大于轴向分力,径向分力会促使驱动器弯曲,即当腔室端面夹角较大时会更快地使径向分力达到最大,因此30°端面夹角的驱动器在受到55 kPa气压后弯曲角度增加较明显。
3.3.4 凹槽深度对弯曲角度的影响
两腔室之间的凹槽深度h会影响腔室端面的膨胀面积,凹槽越深腔室端面的膨胀面积越大。设置凹槽深度分别为1,2,3充气输入压力设置为0~40 kPa,压力增量为5 kPa,仿真分析不同凹槽深度下驱动器的弯曲角度,结果如图8所示。
图8
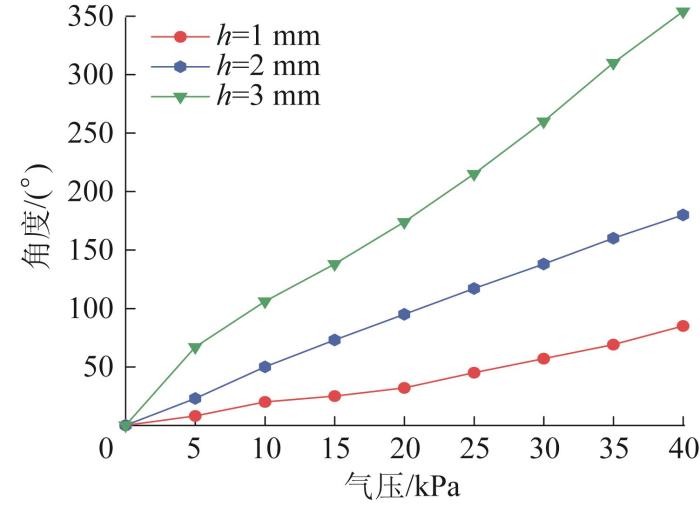
由图8可知,凹槽深度对驱动器弯曲角度有较明显的影响,在相同气压下,随着凹槽深度的增大,弯曲角度呈次方倍增长。凹槽越深,腔室端面在气压作用下膨胀面积越大,腔室整体的膨胀程度越高,从而使驱动器弯曲角度增大。
3.3.5 底层厚度对弯曲角度的影响
当气压作用在腔室端面后,平行于驱动器轴向的分力会使驱动器有一定的轴向伸长,驱动器底层厚度b会影响其一侧轴向伸长量,从而对弯曲角度造成影响。设置底层厚度分别为1,3,5,7,9 mm仿真,输入压力设置为0~60 kPa,压力增量为5 kPa,仿真分析不同底层厚度下驱动器的弯曲角度,结果如图9所示。
图9
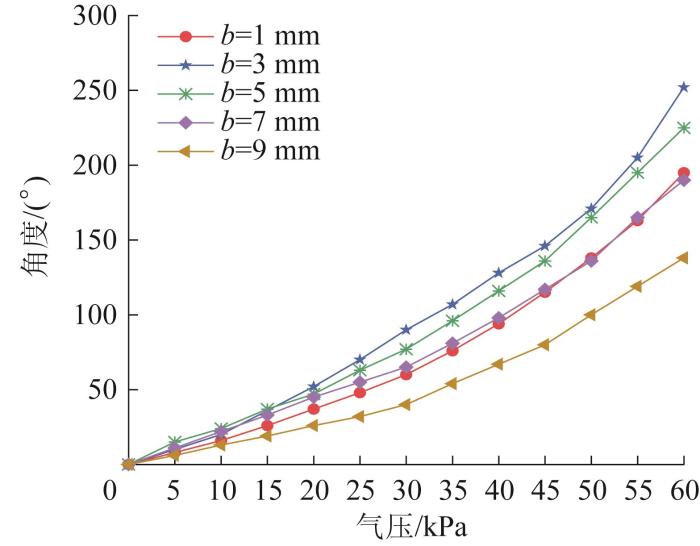
图9
不同底层厚度下驱动器的弯曲角度
Fig.9
Bending angle of driver under different substrate thicknesses
由图9可知,驱动器底层厚度并非越大越好,当b<3 mm时,平行于驱动器轴向的刚度较小,所以会产生较大的轴向伸长,导致弯曲角度减小;当b≥3 mm时,底层较厚,轴向刚度增加,轴向伸长减小,使驱动器向底层方向弯曲,但底层部过厚会增加弯曲刚度,反而抑制驱动器弯曲。因此,b=3 mm时驱动器弯曲性能最好。
4 驱动器制作与性能测试
为了测试驱动器的弯曲性能,采用硅胶制作了驱动器,并搭建了气动控制实验平台,测试驱动器在不同气压下的弯曲角度。基于驱动器设计了一种夹爪长度可调节的软体夹持器,测试其对不同尺寸、形状和质量物体的夹持能力。驱动器的尺寸参数如表1所示。
表1 弯曲驱动器的尺寸参数
Table 1
| 参数 | 数值 |
|---|---|
| 腔室端面半径/mm | 9 |
| 腔室壁厚/mm | 1 |
| 腔室端面夹角/(°) | 30 |
| 凹槽深度/mm | 1 |
| 底层厚度/mm | 3 |
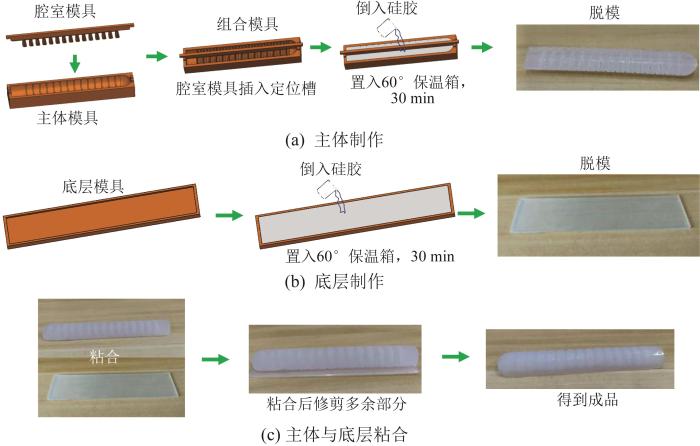
4.1 驱动器制作
驱动器为多腔室结构,采用硬度为30度的普通AB型硅胶制作。主体和底层分开制作,制作完成后粘合得到成品。驱动器制作流程如图10所示。
图10
4.2 气动控制实验平台的搭建
为了测试驱动器的弯曲性能,搭建了气动控制实验平台如图11所示。实验装置可以分为气动模块和电子模块,包括直流电源、调压阀、二位二通电磁阀、继电器、气泵、Arduino控制面板。在气动模块中,由气泵提供气源,气体经电子气压调压阀调节后,经磁通阀连接驱动器。在电子模块中,由交-直流转换器提供电源,电磁阀、磁通阀和电子气压调节阀相连接,利用Arduino控制电磁阀来控制气动模块的气压通断和压力大小,进而达到控制驱动器的目的。
图11
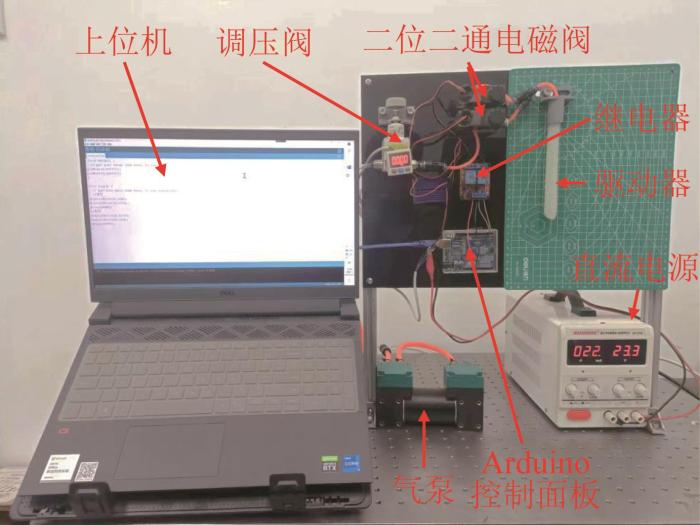
图11
驱动器气动控制的实验平台
Fig.11
Experimental platform for pneumatic control of drivers
4.3 驱动器弯曲性能实验与分析
图12
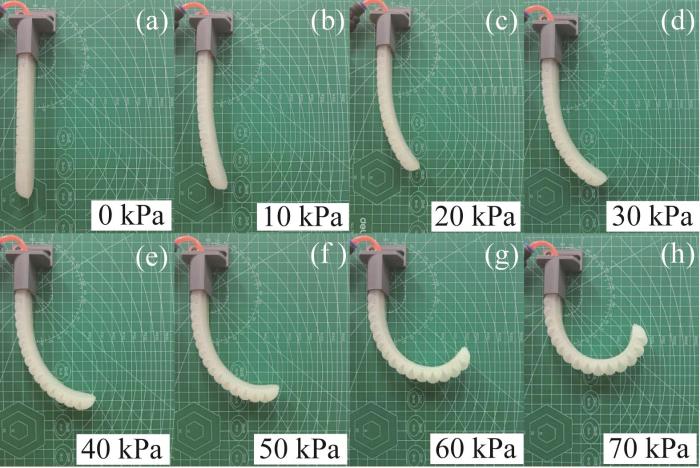
图13
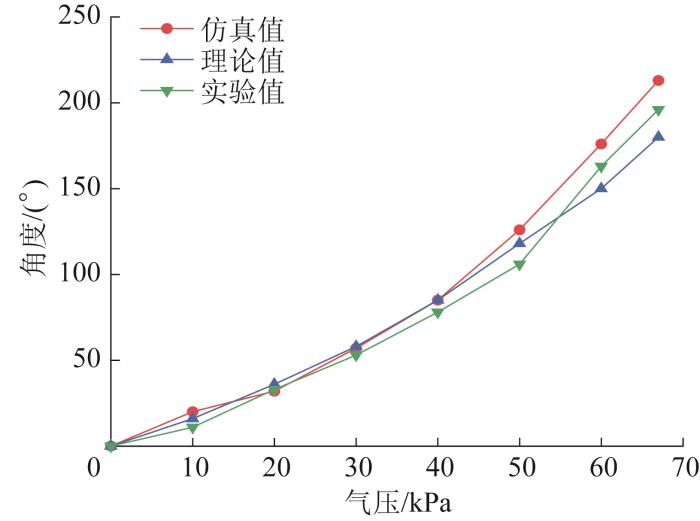
图13
驱动器弯曲角度理论值、仿真值与实验值的对比
Fig.13
Comparison of theoretical, simulation, and experimental values of driver bending angle
实验表明,驱动器弯曲角度随着输入气压的增加而逐渐增大。由图13可知:当气压为0~40 kPa时,弯曲角度仿真值与实验值的最大误差为5°,理论值与实验值的最大误差为7°;当气压为40~70 kPa时,仿真值与实验值的最大误差为20°,理论值与实验值的最大误差为16°。当气压大于40 kPa时,误差较大,其原因可能是,实验时当气压达到一定值后驱动器腔室壁会膨胀而变薄,其弹性模量发生改变,而建模和仿真时腔室壁的弹性模量设为恒定值。
4.4 驱动器实用性测试
为了测试驱动器在实际中的可用性,设计了一种夹持器并对不同尺寸、形状和质量的物体进行夹持实验。夹持器夹持不规则物体时,设置输入气压为30 kPa;夹持器的夹持力受输入气压的影响,因此给定不同的气压值,测试夹持器对应的最大夹持质量,测试所用的每个砝码重为5.5 g。实验结果如图14所示。图中L2为夹持器夹爪长度。
图14
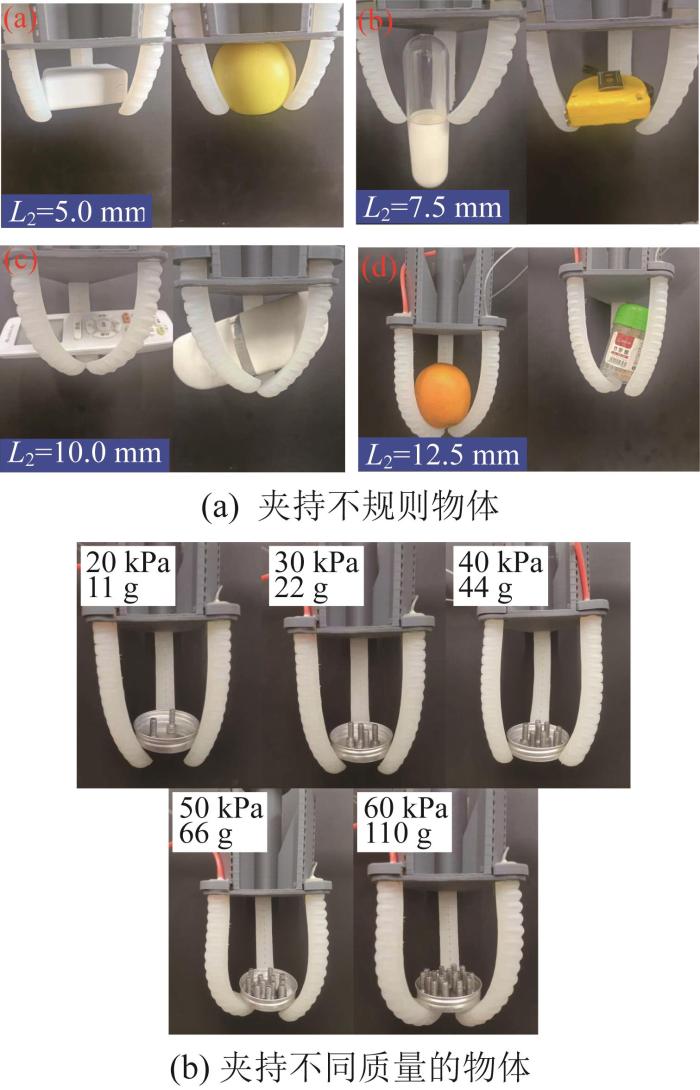
图14
夹持器夹持物体的实验结果
Fig.14
Experimental results of clamping objects with grippers
5 结 论
本文设计了一种扇形腔室结构的软体多腔室弯曲驱动器。建立了驱动器输入气压与弯曲角度之间的函数关系。通过Abaqus软件仿真分析了不同尺寸参数对驱动器弯曲性能的影响。制作了驱动器和夹持器,分别测试了其弯曲性能和夹持性能,验证了所设计驱动器和夹持器的实用性。主要结论如下:
1)基于Yeoh模型结合力学平衡及能量守恒原理,建立了驱动器输入气压与弯曲角度之间的函数关系。该方法具有较高的精度和效率,可以拓展应用于其他腔室软体驱动器理论建模。
2)在相同输入气压下,本文所设计的扇形腔室驱动器的弯曲角度比传统矩形腔室驱动器大,具有更好的弯曲性能。
3)通过调整驱动器的腔室端面半径、腔室壁厚、腔室端面夹角、凹槽深度、底层厚度等结构参数可调整驱动器弯曲性能。在给定输入气压0~40 kPa下,可以实现驱动器0~350°的弯曲。
4)基于扇形多腔室弯曲驱动器设计了软体夹持器,其能实现对不同尺寸、形状、质量物体的稳定夹持。相较于传统的限制层约束型夹持器,在保证弯曲性能的基础上,其制作更加简单,成本更加低廉,在医疗手术、康复治疗和救援探测等领域具有广阔的应用前景。
未来,笔者将进一步对弯曲驱动器的变刚度性能进行研究,使弯曲驱动器在保证弯曲性能的同时增加自身刚度,以提高其承载能力。
参考文献
软体机器人研究现状综述
[J].DOI:10.3901/jme.2012.03.025 [本文引用: 1]
Review of soft-bodied robots
[J].DOI:10.3901/jme.2012.03.025 [本文引用: 1]
Biology and bioinspiration of soft robotics: actuation, sensing, and system integration
[J].
A soft multi-module manipulator with variable stiffness for minimally invasive surgery
[J].
An articulated universal joint based flexible access robot for minimally invasive surgery
[C]//
A soft tube-climbing robot
[J].
The design and development of branch bot: a branch-crawling, caterpillar-inspired, soft robot
[J].
An integrated design and fabrication strategy for entirely soft, autonomous robots
[J].
Soft robotic glove for combined assistance and at-home rehabilitation
[J].
Use of a pneumatic glove for hand rehabilitation following stroke
[C]//
Bistable minimum energy structures (BiMES) for binary robotics
[J].
A eutectic-alloy-infused soft actuator with sensing, tunable degrees of freedom, and stiffness properties
[J].
Cooperative collapse of helical structure enables the actuation of twisting pneumatic artificial muscle
[J].
Design and experiments of pneumatic soft actuators
[J].
Mechanical programming of soft actuators by varying fiber angle
[J].
仿生气动软体蠕动机器人的研究
[D].
Research on bionic pneumatic peristaltic soft robot
[D].
Octopus arm-inspired tapered soft actuators with suckers for improved grasping
[J].
A novel design of shape-memory alloy-based soft robotic gripper with variable stiffness
[J].
Closing the loop with liquid-metal sensing skin for autonomous soft robot gripping
[C]// 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft). Virtual,
Multi-functional dielectric elastomer artificial muscles for soft and smart machines
[J].
A compliant translational mechanism based on dielectric elastomer actuators
[J].
A 3D-printed, functionally graded soft robot powered by combustion
[J].
An integrated design and fabrication strategy for entirely soft, autonomous robots
[J].
A bioinspired soft robotic gripper for adaptable and effective grasping
[J].
Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines
[J].
多腔体式仿生气动软体驱动器的设计与制作
[J].DOI:10.3785/j.issn.1006-754X.2017.05.004 [本文引用: 1]
Design and fabrication of a multi-cavity bionic pneumatic soft actuator
[J].DOI:10.3785/j.issn.1006-754X.2017.05.004 [本文引用: 1]
Constant curvature continuum kinematics as fast approximate model for the Bionic Handling Assistant
[C]//
一种变刚度柔性手爪设计及其性能研究
[D].DOI:10.7498/aps.69.20191508 [本文引用: 1]
Design and performance of a flexible hand claw with variable stiffness
[D].DOI:10.7498/aps.69.20191508 [本文引用: 1]
气动软体驱动器设计与建模
[J].
Design and modeling of pneumatic soft body drive
[J].
一种新型软体驱动器的设计与研究
[J].
Design and research of a new soft body drive
[J].
基于单向气动驱动器的软体手变形机理
[J].
Mechanism of soft hand deformation based on unidirectional pneumatic actuator
[J].
Finite element analysis of super-elastic rubber materials based on the mooney-rivlin and yeoh model
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}