


地球表面积的2/3是海洋面积。我国海洋国土面积为300万 km 2,约为我国陆地面积的1/3。探索未知海洋要用到多种技术手段,而自主水下机器人(autonomous underwater vehicle,AUV)以其独特的优越性,被频繁应用于海洋勘探工作 [ 1]。近几年来,AUV的应用领域不断拓宽,其被广泛应用于海洋探测、油田勘探、海底打捞及海底信息情报获取等。随着人们对AUV作业任务及功能需求的不断增加,AUV逐渐向自主化、长期化、无人化方向发展。由于AUV须频繁地回收以补充能源,传统基于人工的布放回收方式已经不能满足未来作业的需求 [ 2]。当AUV在深海作业时,其回收需花费较长时间,若海况较差,则回收过程具有一定的风险 [ 3]。无人水面船(unmanned surface vessel,USV)作为水面航行的无人自主机器人,具有很强的载荷搭载能力和续航能力,且航行速度较快。AUV与USV协同作业,可以取长补短、优势互补 [ 4],极大地提高海上无人系统的作业效率,为最终实现海上无人作业提供技术支撑。利用USV自主回收AUV,首先须实现USV与AUV的水下对接捕获。为此,国内外学者已对USV布放回收AUV过程中的对接技术开展了研究。如:Page等 [ 5]提出了一种集成导航算法,采用该算法可促进AUV可靠水下对接;Meng等 [ 6]设计了一种由钢杆、缆绳和稳定翼组成的水下牵引系统,提高了AUV水下回收的成功率;Sarda等 [ 7]制作了基于双体USV的拖曳对接装置的原理样机,测试了对接装置的可行性与有效性;Mcewen等 [ 8]开发了一套AUV对接站,其具有下载数据、上传作业计划、为电池充电等功能。
结合目前大多数AUV的自身特点及其回收系统所采用的对接捕获形式,作者设计了一种适用于双体USV的AUV自主布放回收系统。该布放回收系统结构简单可靠,可用于布放回收不同外径尺寸的AUV,通用性较好,在未来海洋探测中具有广阔的应用前景。
1 常用 AUV布放回收方式和布放回收系统
图1
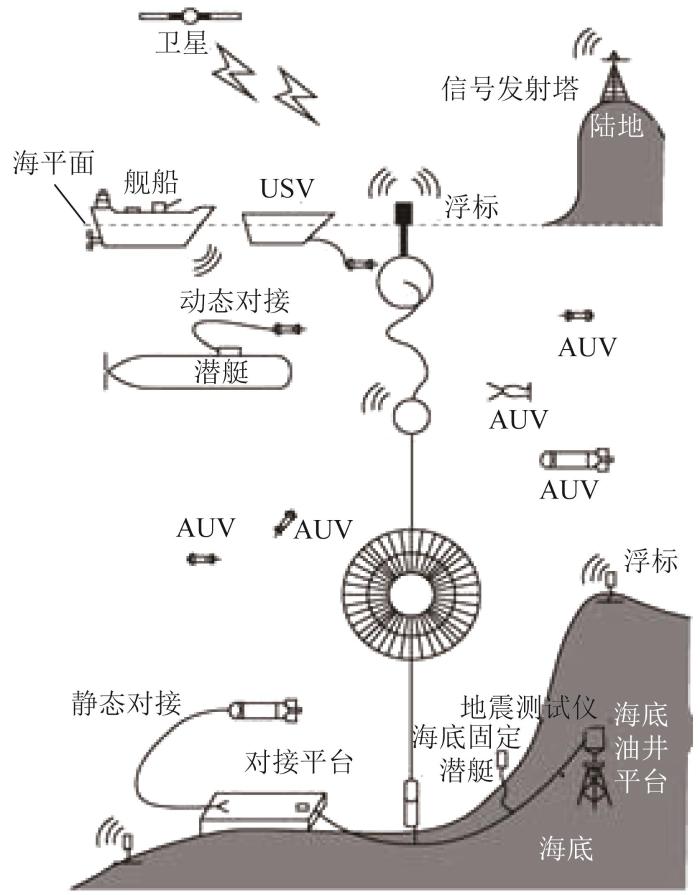
图2
图3
图4
2 AUV布放回收系统设计及工作原理
2.1 系统设计
借鉴佛罗里达大西洋大学研制的布放回收系统的对接捕获方法,作者设计了基于USV的AUV布放回收系统。该布放回收系统结构简单,易于对接,适用于不同尺寸的光滑圆柱形AUV。其结构如 图5所示,主要由对接框架、转接板、刚性杆、折合板、电动推杆、转接件和连接杆等组成。对接框架长为3 176 mm,宽为1 200 mm,高为1 352 mm,质量为80 kg。对接框架通过安装在其两侧的4个转接板安装在USV中间位置。刚性杆布置在对接框架前端,用于完成与AUV的对接任务。对接杆不采用以往的柔性缆绳,而采用可伸缩的刚性杆,其受海水扰动较小,且没有轴向自由度,只能横向摆动。折合板布置在对接框架两侧,通过转动轴承与对接框架连接,是布放回收的关键部件。电动推杆固定在对接框架顶部,其底部连接转接件,转接件连接2个连接杆,连接杆与折合板上的轴承基座进行连接。刚性杆和电动推杆的运动需要外部能源,能源模块布置在USV舱体内。电缆线路的布置通过穿舱件完成。
图5
2.2 工作原理
USV自主回收AUV是一个AUV由远及近逐渐驶向USV的过程,回收流程如 图6所示。流程为:第1步,AUV通过水声通信在水下对USV进行定位,获取定位信息后航行至USV附近,并浮出水面进行水面航行;第2步,AUV驶向USV,并通过网桥通信调整姿态而进入回收系统;第3步,当AUV接近USV时,回收系统刚性杆上电,向水下延伸,同时折合板打开,AUV前端捕获机构与刚性杆进行对接,待AUV前端卡舌与刚性杆咬合后,AUV轴向移动被限制;第4步,检测到AUV捕获完成信号后,刚性杆和电动推杆收缩,折合板闭合并将AUV抱离水面,完成回收。
图6
在AUV回收流程的前2步,对AUV自身导航精度要求不高,而第3步是实现水面对接捕获,是回收AUV的关键,因此下面重点介绍对接捕获过程。
在第3步中,AUV与USV的距离较近,通常小于30 m,且两者定向逆流航行。AUV通过北斗卫星导航系统完成定位,并且以快于USV的航速驶向USV,逐渐缩短与USV的距离。当两者距离小于5 m时,AUV再次确定与USV的位置及姿态信息,并加速驶向刚性杆,直至其前端卡舌与刚性杆咬合。当AUV的航向与回收系统的航向平行时,便可进行后续回收步骤。若AUV被捕获后因受外界影响未与回收系统的航向保持平行,则由USV拖带AUV航行而逐步改变其航线,以尽可能保持AUV与回收系统的航向一致。待AUV整体处于折合板开角范围内时,刚性杆上移,同时电动推杆带动折合板闭合,将AUV抱出水面,完成回收。
3 AUV布放回收仿真
3.1 受力分析
在布放回收AUV的过程中,折合板与AUV存在动态接触,折合板会对AUV施加一个实时变化的支撑力。在这个过程中,折合板因受力而发生形变。为了保证回收系统的安全性,须对折合板进行受力分析。回收系统的材料选用45号钢。45号钢的性能参数如 表1所示,其具有较好的强度和耐磨性。
表1 45号钢性能参数
Table 1
| 参数 | 量值 |
|---|---|
| 条件强度极限 | 355 MPa |
| 抗拉极限 | 600 MPa |
| 伸长率 | 16% |
| 泊松比 | 0.31 |
| 材料密度 | 7 850 kg/m 3 |
折合板受力如 图7所示。图中:圆表示AUV横截面, AB表示折合板截面, A点表示转轴截面。当折合板与AUV接触时,会在折合板与AUV的接触点
图7
通过受力分析可知:
式中:
求解
式中:
由式(2)可知,
回收系统两侧的4个转轴基座承受折合板和AUV的重力,单个转轴基座承受折合板重力 G折的1/2和AUV总重力 G的1/4,即:
实际测得一个折合板的重力
3.2 ADAMS动力学仿真
图8
图9
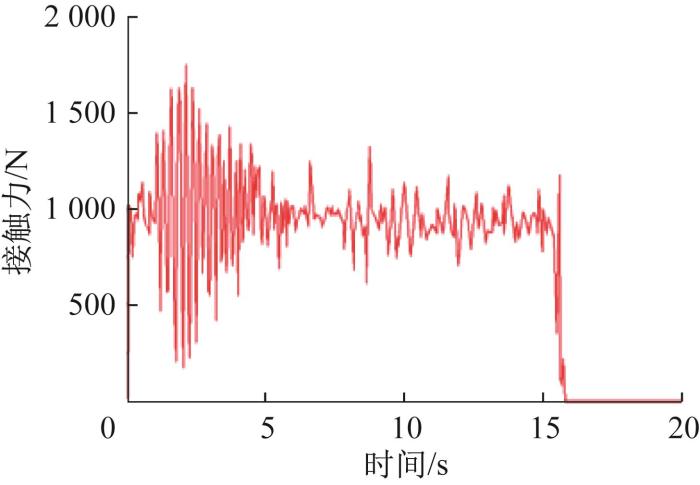
由 图9可知:接触力整体呈先增大后减小的趋势,与受力分析得出的结果一致;接触力最大值为 1 700 N。
3.3 折合板和轴承基座的应力及位移仿真
采用Solidworks软件中的Simulation功能模块对折合板和轴承基座进行静应力分析。
将折合板与AUV接触位置的受力设置为1 700 N,折合板的材料设置为45号钢,折合板上转轴位置设置为固定,划分网格,进行仿真运算。在承受最大力时,折合板应力及位移的仿真结果如 图10所示。由图可知,折合板的最大应力为13 MPa,最大位移为0.45 mm,满足了强度和稳定性的要求。在对接过程中AUV与对接杆存在瞬时碰撞作用力,为了避免对AUV造成损坏,在折合板表面包裹一层缓冲泡沫。
图10
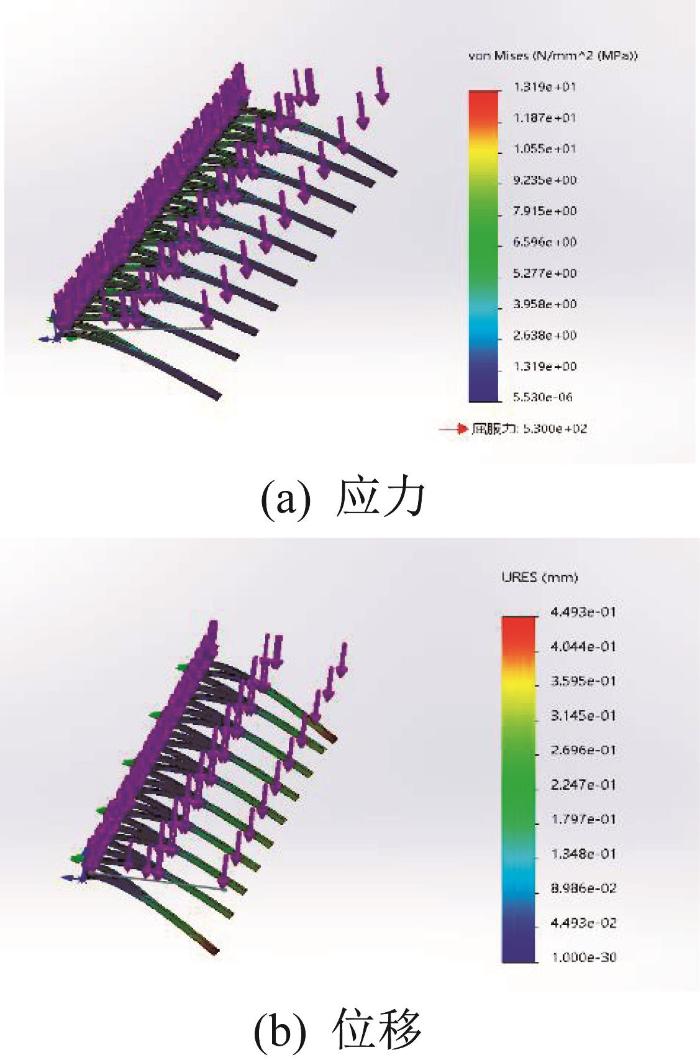
图10
折合板应力及位移仿真结果
Fig.10
Simulation results of stress and displacement of folded plate
在布放回收过程中,AUV和折合板的重量由安装在两侧的转轴基座承受,因此,轴承基座的可靠性至关重要。在Simulation功能模块中,将轴承基座的材料设置为45号钢,轴承基座底面设置为固定,在轴承基座内侧施加525 N的力,进行仿真运算。轴承基座应力及位移的仿真结果如 图11所示。由图可知,轴承基座所受最大应力为2.78 MPa,最大位移为0.000 07 mm,也符合强度和稳定性要求。
图11
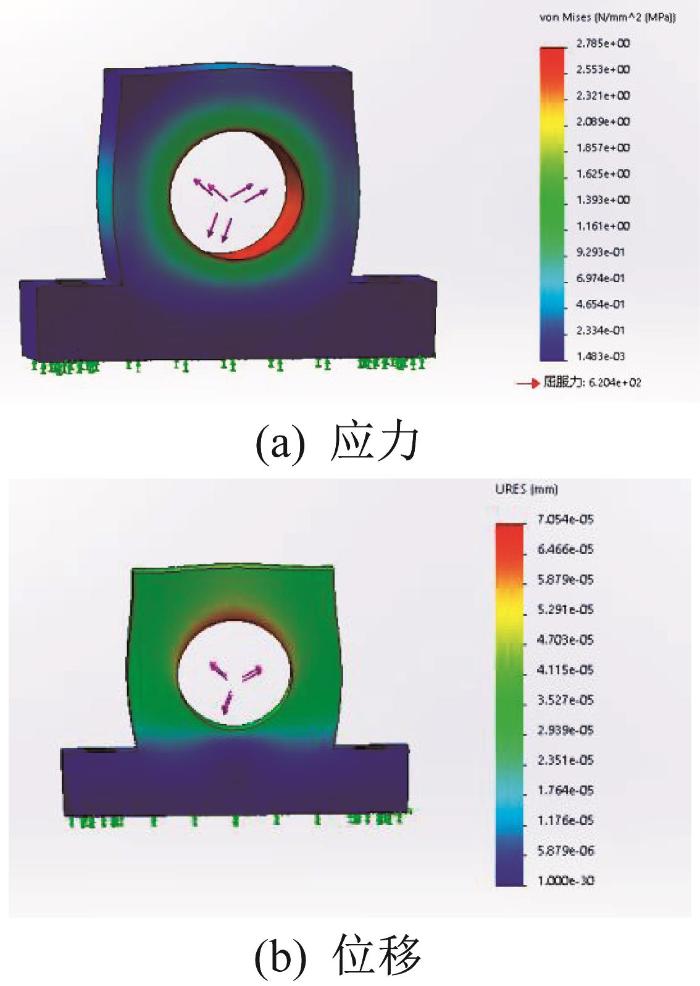
图11
轴承基座应力及位移仿真结果
Fig.11
Simulation results of stress and displacement of bearing housing
4 实验验证
为了验证所设计的布放回收系统的可行性,搭建了系统的原理样机,进行AUV布放回收实验。实验分为陆上实验和湖上实验两阶段。陆上实验验证机构的运动能力和稳定性,湖上实验验证系统整体的工作能力。AUV布放回收实验如 图12所示。
图12
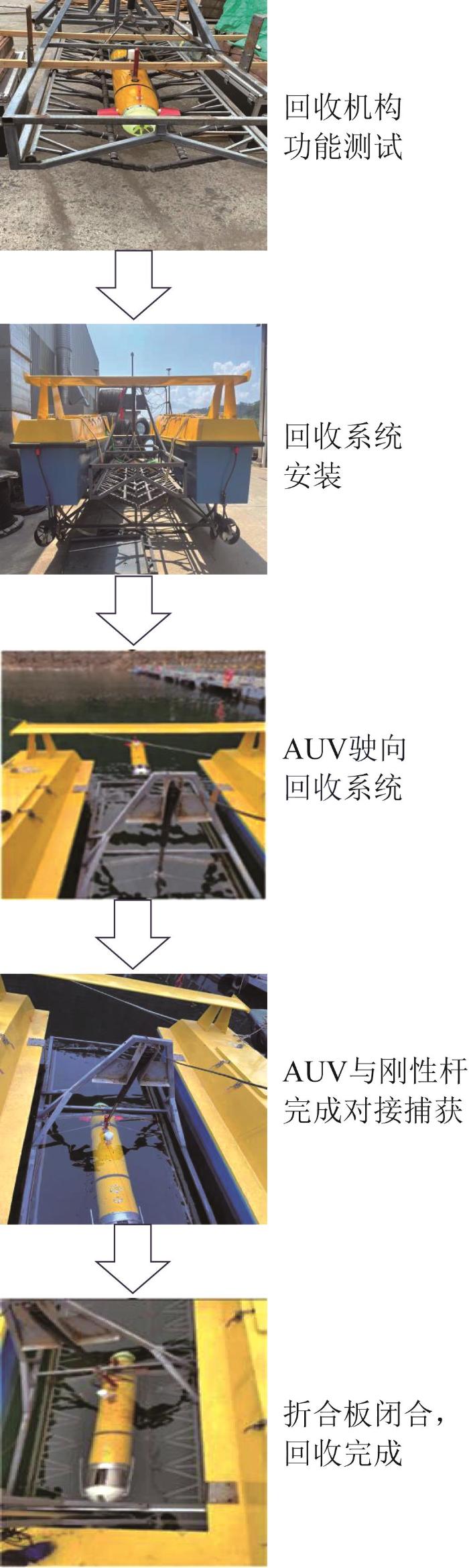
湖上实验:AUV通过水声通信对USV进行定位,获取与USV的相对位置后驶向USV,航行至USV附近后打开其前端的捕获机构,继续向安装在USV中的回收系统靠近,直至捕获机构与刚性杆咬合;当AUV姿态稳定且处在正确位置时,回收系统的折合板闭合,将AUV抱离水面,完成回收。可以通过以下2种方法调整AUV姿态:1)调整AUV艉舵,通过其自身操纵能力调整姿态;2)USV拖曳AUV向前航行,依靠水流改变AUV姿态。实验表明,布放回收系统能够实现与AUV的对接,并通过执行机构带动折合板将AUV从水中进行回收。
5 结 论
本文首先介绍了几种国内外常用的AUV布放回收方式和布放回收系统。结合目前大多数AUV的自身特点及回收系统所采用的对接捕获形式,设计了一种基于USV的AUV布放回收系统,并对该系统进行了总体结构设计、受力分析和强度分析,同时介绍了系统的工作原理和流程。为了验证所设计布放回收系统的可行性,搭建了系统原理样机,进行了其陆上实验和湖上实验。陆上实验验证了系统的运动性能,各机构运动正常,不存在干涉;湖上实验验证了系统的整体操控流程及功能,布放回收系统在正常工况下能完成对AUV的布放回收任务。实验表明,所设计的布放回收系统具备AUV自主布放回收功能,可实现无人自主作业,功能稳定可靠,且结构相对简单。后续将继续开展自主布放回收测试,对系统的整体结构进行优化,为其应用的普适性提供支撑。
参考文献
Mission management and control of BSA-AUV for ocean survey
[J].
Globally finite-time stable tracking control of underactuated UUVs
[J].
水下特种运载器水下回收方式
[J].
Research on the underwater recovery manner for underwater special vehicles
[J].DOI:10.3969/j.issn.1002-0640.2016.02.008 [本文引用: 1]
Launch and recovery of an autonomous underwater vehicle from a station-keeping unmanned surface vehicle
[J].
Underwater docking approach and homing to enable persistent operation
[J].
Study on the mechanical characteristics of an underwater towing system for recycling an autonomous underwater vehicle (AUV)
[J].
Unmanned recovery of an AUV from a surface platform manuscript
[C]//
Docking control system for a 54-cm-diameter (21-in) AUV
[J].
UUV布放回收技术
[J].
UUV deployment recycling technology
[J].
Leader-following consensus of discrete-time multi-AUV recovery system with time-varying delay
[J].
基于USV的AUV对接回收系统设计与动力学特性研究
[D].
Design and dynamic characteristics study of AUV recovery docking system based on USV
[D].
AUV launch and recovery: A key enabling technology for organic MCM Operations
[J].
Novel AUV launch, recovery new approaches using combined USV-AUV method
[J].
AUV水下对接关键技术研究
[J].
A survey on the key technologies for underwater AUV docking
[J].DOI:10.3321/j.issn:1002-0446.2007.03.014 [本文引用: 1]
Au-tonomous docking demonstrations with enhanced REMUS technology
[J].
Marine bird, a new experimental AUV-results of docking and electric power supply tests in sea trials
[J].
Results from mechanical docking tests of a Morpheus class AUV with a dock designed for OEX class AUV
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}