


随着社会的发展和进步,高层和超高层建筑逐渐增多,高层消防救援问题日益突出。举高类消防车可实现高空灭火、高层救援等功能,在高层消防救援任务中发挥巨大作用。
举高类消防车通常可以分为三大类:登高平台消防车、云梯消防车以及举高喷射消防车[1]。为了操作方便,举高类消防车通常在多个位置设置操作台,主要包括消防操作台、下车操作台、转台操作台和工作平台操作台。其中:消防操作台一般布置在消防车下车左侧中部,包括显示器、指示灯和控制按钮等,主要用于实现对消防系统的操作。下车操作台位于消防车下车尾部,同样包括显示器、指示灯和控制按钮等,主要用于实现对下车水平支腿和垂直支腿的控制。转台操作台位于消防车上车转台左侧,包括显示器、指示灯、操作手柄和控制按钮等,主要用于实现对消防车转台、臂架和工作平台的控制。工作平台操作台位于消防车工作平台内,其功能与转台操作台基本相同[2-3]。
当举高类消防车工作时,操作人员须先进行下车操作,将水平支腿和垂直支腿伸出,并将车身调整至水平状态。随后,操作人员进行上车操作,将臂架伸展至指定的高度和幅度,以开展人员救助;开始灭火时,操作人员须在消防操作台上控制水泵运转、打开相应阀门,以实现灭火剂的喷射;同时,为实现上述操作,操作人员还须在驾驶室内进行挡位控制、油泵取力和水泵取力操作[4]。
举高类消防车的控制系统复杂,使用时通常需要2名以上的操作人员在多个操作台处互相配合,且要求操作人员对消防车极为熟悉和具有较高的技术水平,这样才能在救援现场实现高效率的操作。但是,不同厂家生产的消防车的操作方法各有不同,而救援现场往往瞬息万变,操作人员须争分夺秒,这对操作人员提出了更高的要求[5]。
为此,笔者提出了一种具有语音控制功能的举高类消防车控制系统。基于该控制系统,操作人员可以集中精力观察消防车的状态,无须使用操作手柄或控制按钮等来控制消防车动作,只要利用特定语言发出语音指令,PLC(programmable logic controller,可编程逻辑控制器)根据接收到的语音指令和消防车状态自动控制相应的执行机构,实现消防车的动作。同时,当消防车出现状态变化或发生故障时,可通过语音播报模块播放动作限制和故障信息,以便于操作人员接收重要信息。
1 语音控制功能的关键技术
举高类消防车控制系统的语音控制功能要依托语音控制模块和自动控制功能才能实现。
1.1 语音控制模块
CAN总线通信模块以SN65HVD232DR芯片为核心,负责接收MCU模块处理后的语音指令数据,并按照CANopen通信协议将数据发送至整车的CAN总线网络。其中,波特率可设为250 kB,也可根据实际需求进行设定。在整车CAN总线网络上,PLC负责实时接收信息和进行数据处理[14]。
1.2 自动控制功能
举高类消防车自动控制功能的实现主要依靠PLC,当PLC接收到外界指令信息后,根据程序逻辑和算法运算自动控制消防车执行机构动作。举高类消防车的自动控制功能包括常规操作(消防车的起动、熄火、油门加减、水泵取力和油泵取力等)、消防系统动作(消防打水、消防打泡沫和消防清洗)和臂架动作的自动控制。
举高类消防车的自动控制功能可实现不使用操作手柄进行臂架动作,但须提前在PLC内设置固定的操作手柄参数[17]。PLC根据操作手柄参数设定值、臂架的角度和长度等信息自动控制臂架平稳动作。
首先,在PLC内设置操作手柄参数,其设定范围为0~16 383。经过多次测试验证,自动控制时操作手柄参数设置为15 000左右较合适,需要调整时可在显示器上直接修改。
然后,根据臂架的角度和长度,计算减速参数。以主臂变幅起动作为例,利用
式中:K——减速参数,取值范围为0.3~1.0;
θmax——主臂的最大角度,通常为83°或85°;
θmin——主臂的最小角度,通常为0°;
θnow——主臂的实时角度。
最后,利用
式中:Ia, max——液压比例阀的实际最大驱动电流,取值范围为270~700 mA;
Jset——操作手柄参数设定值;
Jmax——操作手柄参数最大值,为16 383;
Imax——液压比例阀的理论最大驱动电流。
当需要停止臂架动作时,使液压比例阀的驱动电流从最大值开始逐渐递减,直至降到270 mA以下,此时臂架停止动作。
通过上述方法,可利用PLC实现举高类消防车臂架平稳起步、动作和停止的自动控制。
2 新型控制系统应用方案
本文提出的具有语音控制功能的举高类消防车控制系统是在原有控制系统的基础上增加了智能语音控制模块和语音播报模块,用于实现相应的功能,其结构框图如图1所示。
图1
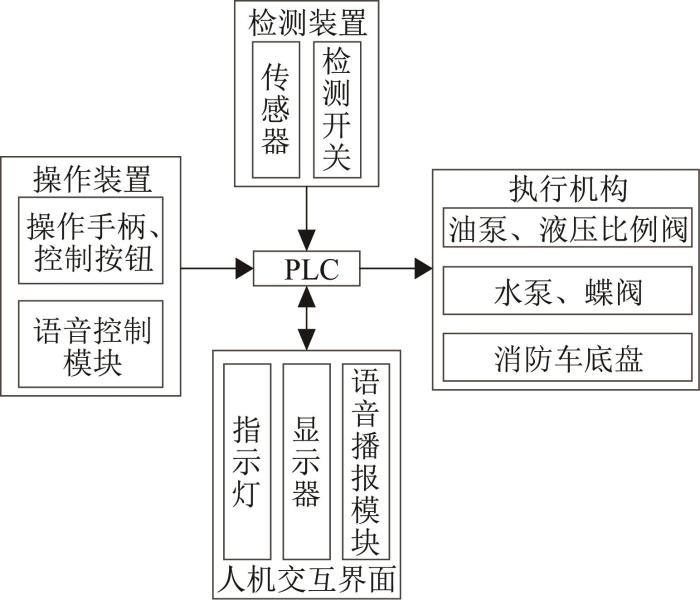
图1
具有语音控制功能的举高类消防车控制系统的结构框图
Fig.1
Structure diagram of control system of aerial fire fighting vehicle with voice control function
2.1 语音控制功能
考虑到消防车功能的特殊性,必须保证消防车的运行过程绝对可靠,因此语音控制功能和常规的基于操作手柄、控制按钮等的手动操作功能应同时存在。当一种功能出现问题时,另一种功能可应急使用。此外,语音控制功能的优先级须低于常规的手动操作功能,即当操作人员通过操作手柄或控制按钮来控制消防车时,语音控制功能自动被屏蔽,无法使用。当所有操作手柄或控制按钮均未被操作时,只有按下语音控制模式的使能按钮,才能启用语音控制功能,这是为了避免多套控制系统同时起作用,导致意外情况发生,从而保证消防车可靠运行。
不同类型消防车的语音控制模块中存储的语音指令词条有所区别。以徐工消防安全装备有限公司生产的66 m登高平台消防车为例,其可以设置50条语音指令词条,具体如表1所示。
表1 66 m登高平台消防车的语音指令词条
Table 1
| 序号 | 语音指令 | 序号 | 语音指令 |
|---|---|---|---|
| 1 | 起动 | 26 | 主臂伸 |
| 2 | 熄火 | 27 | 主臂缩 |
| 3 | 接通油泵取力 | 28 | 主臂伸缩停止 |
| 4 | 断开油泵取力 | 29 | 二臂变幅起 |
| 5 | 接通水泵取力 | 30 | 二臂变幅落 |
| 6 | 断开水泵取力 | 31 | 二臂变幅停止 |
| 7 | 真空泵开启 | 32 | 二臂伸 |
| 8 | 真空泵停止 | 33 | 二臂缩 |
| 9 | 油门加 | 34 | 二臂伸缩停止 |
| 10 | 油门减 | 35 | 曲臂展 |
| 11 | 油门调整停止 | 36 | 曲臂收 |
| 12 | 消防打水 | 37 | 曲臂展收停止 |
| 13 | 关闭消防打水 | 38 | 平台左旋 |
| 14 | 消防打泡沫 | 39 | 平台右旋 |
| 15 | 关闭消防打泡沫 | 40 | 平台上旋 |
| 16 | 消防管路清洗 | 41 | 平台下旋 |
| 17 | 关闭消防管路清洗 | 42 | 平台旋转停止 |
| 18 | 下车支腿伸 | 43 | 平台回中位 |
| 19 | 下车支腿收 | 44 | 水炮上旋 |
| 20 | 转台左转 | 45 | 水炮下旋 |
| 21 | 转台右转 | 46 | 水炮左旋 |
| 22 | 转台旋转停止 | 47 | 水炮右旋 |
| 23 | 主臂变幅起 | 48 | 水炮直流 |
| 24 | 主臂变幅落 | 49 | 水炮散花 |
| 25 | 主臂变幅停止 | 50 | 水炮动作停止 |
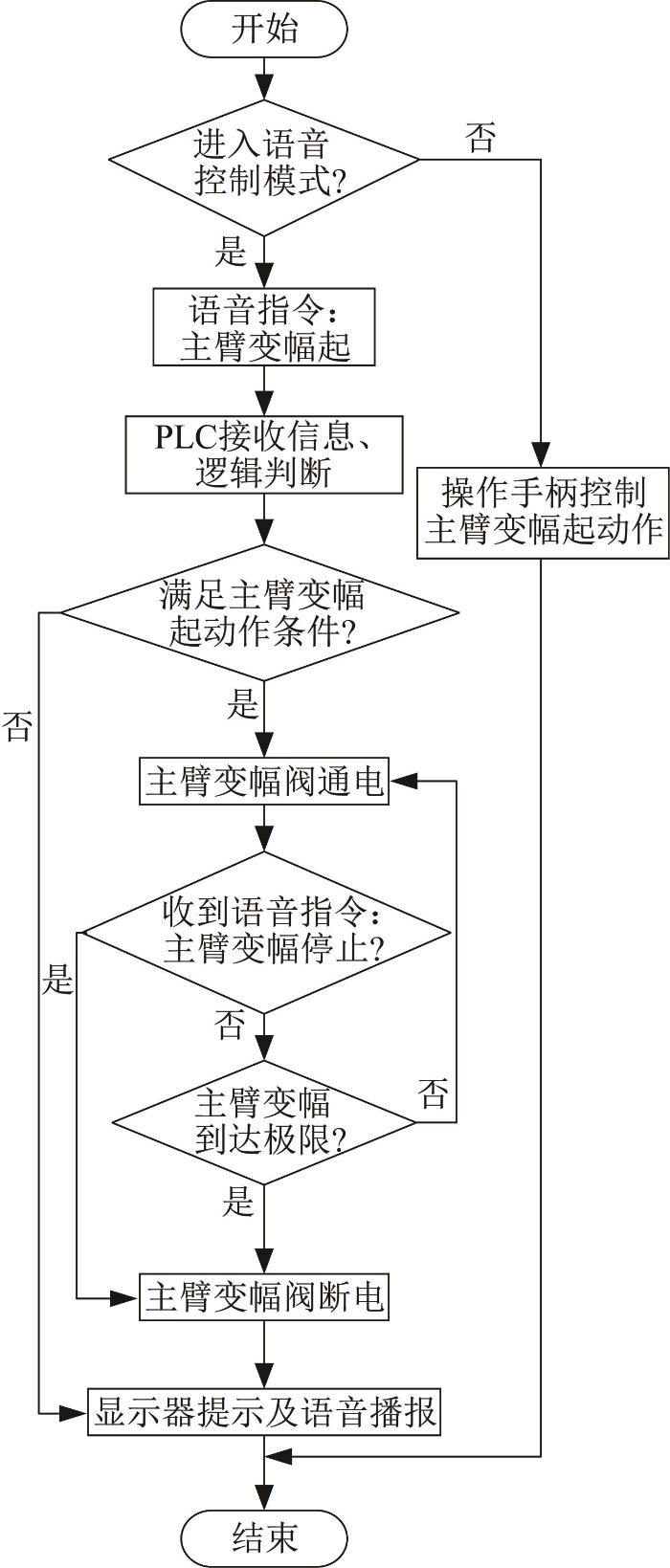
以消防车主臂变幅起的语音控制为例,阐述语音控制功能的实现过程。首先,设置消防车上的操作手柄和控制按钮等常规操作装置不能使用;然后,按下语音控制模式使能按钮,进入语音控制模式。在语音控制模式下,若出现任何常规操作装置的动作,则立刻退出语音控制模式,语音指令无效,从而保证消防车稳定可靠运行。
基于语音控制的主臂变幅起流程如图2所示。当识别到语音指令“主臂变幅起”时,语音控制模块将该语音指令通过CAN总线发送到PLC。PLC接收到该语音指令后进行逻辑运算,判断是否满足主臂变幅起动作的条件:若不满足条件,则通过显示器和语音报警装置进行文字和语音提示,及时告知操作人员限制条件;若满足条件,则PLC控制主臂变幅阀通电,进行主臂变幅起动作。PLC根据主臂角度、长度等信息,自动调整主臂变幅阀的驱动电流,控制变幅起动作的速度,以保证主臂动作的稳定性。当主臂变幅起动作持续进行时,若未收到任何停止指令,则PLC控制主臂变幅阀通电,直到主臂变幅起至极限角度后停止,此时显示器和语音报警装置通过文字和语音提示“主臂变幅起至极限角度”;若PLC接收到语音指令“主臂变幅停止”,则主臂变幅阀的驱动电流逐渐减小直至断电,主臂迅速减速并停止动作,同时显示器和语音报警装置通过文字和语音提示“主臂变幅已停止”。
图2
在利用语音控制消防车相应的动作时,操作人员只需要注意消防车的状态和现场情况,通过语音发出相应的动作指令,由语音控制模块识别语音指令并通过CAN总线传输到PLC,PLC根据语音指令和消防车状态,智能化地控制相应的执行机构动作。这种方式大大减轻了操作人员的工作量和降低了工作难度。
语音控制模块可以根据需要安装在消防操作台、下车操作台、转台操作台或工作平台操作台上,也可以根据需要安装在驾驶室内或遥控器上。当多个位置都装有语音控制模块时,可通过设置优先级的方式或设置使能按钮的方式来保证PLC不会同时接收多路控制信号。
2.2 语音播报功能
语音播报功能是为了方便操作人员通过语音的方式接收重要信息。本文设计的语音播报功能是通过增加语音播报模块来实现的。此外,仍须保留消防车常规人机交互界面中的显示器和指示灯,以便操作人员能够多渠道、多方式地及时查看消防车的相关信息及状态。
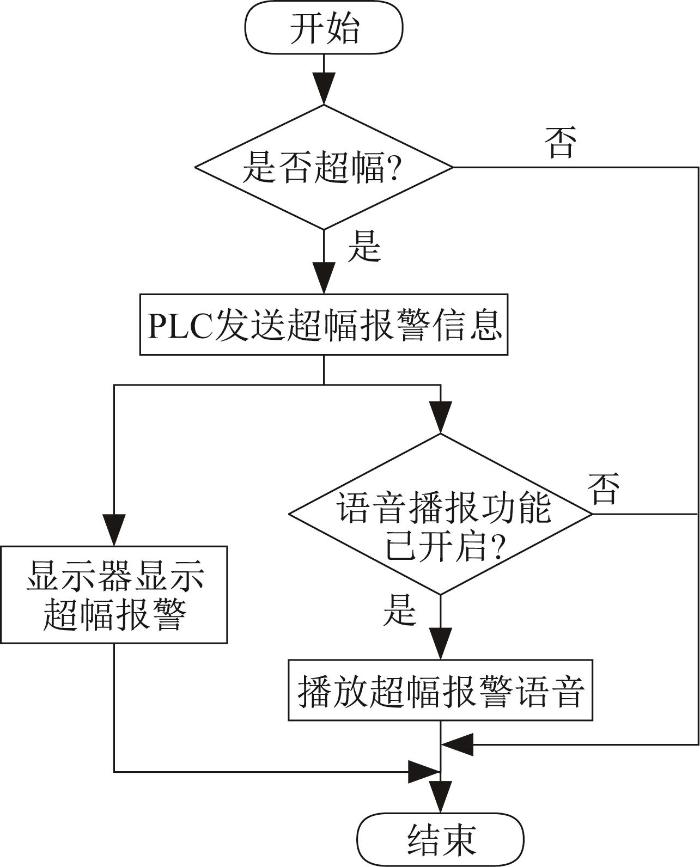
语音播报模块和PLC通过CAN总线相连,且须按照约定的节点顺序在语音播报模块中提前存储所有的语音信息。当消防车工作时,PLC自动判断消防车状态,在消防车出现动作限制和故障报警时,PLC通过CAN总线将相关信息发送到语音播报模块,而后语音播报模块从相应的语音库中选择对应的语音信息并通过音箱播放,以便操作人员能够及时接收重要信息。
语音播报功能默认开启且以汉语普通话进行播放。同时,为了使操作人员有良好的操作体验,可在显示器上选择开启或关闭语音播报功能,并可进行音量调节、循环播报次数设置以及播报语言选择(汉语或英语)。语音播报功能调整界面如图3所示。
图3

图4
3 新型控制系统功能测试
3.1 试验装置
图5

图5
66 m登高平台消防车试验现场
Fig.5
Test site for 66 m high platform fire fighting vehicle
图6
3.2 试验步骤
操作人员在操作台上通过语音发布控制指令,依次控制登高平台消防车起动、熄火、支腿展收、主臂变幅起落、主臂伸缩、二臂变幅起落、二臂伸缩和转台回转等功能。同时,记录语音播报模块是否能够及时播放消防车的动作限制和故障报警信息。
3.3 试验结果
经过测试,在登高平台消防车动作过程中,语音控制模块可以准确识别操作人员发出的语音指令,识别率达到95%以上。结果表明,所设计的具有语音控制功能的控制系统可以根据语音指令自动控制66 m登高平台消防车动作,且具有较好的控制效果;语音播报装置能够及时对动作限制和消防车故障进行循环语音提示,保证操作人员及时注意到重要信息。经验证,具有语音控制功能的举高类消防车控制系统达到了预期的设计效果。
4 结 语
本文设计了一种具有语音控制功能的举高类消防车控制系统,在消防车原有功能的基础上增加了自动控制功能、语音控制功能和语音播报功能。语音控制功能是由语音控制模块识别操作人员的语音指令,通过CAN总线将指令发送到PLC,PLC自动控制执行机构动作。语音播报功能可以及时播放消防车状态变化情况和故障报警信息。所设计的新型自动控制系统能够有效帮助操作人员更加简便地操作举高类消防车,降低了对操作人员技术水平的要求,大大提高了操作效率,且该控制系统可迅速推广至其他类型的消防车以及相关的工程机械类产品,具有较高的应用价值。
参考文献
一种登高平台消防车的控制系统应用研究
[D].
An application research on the control system of a fire truck mounted on a platform
[D].DOI:10.15251/djnb.2020.154.1075 [本文引用: 1]
登高平台消防车工作斗自动调平控制系统
[D].
The automatic leveling system of working platform about aerial platform fire truck
[D].
登高平台消防车的发展现状及趋势
[J].
Development status and trend of aerial platform fire truck
[J].
消防车工况及装备状态实时监测系统设计
[J].
Design of the real-time monitoring system for fire engine and equipment condition
[J].DOI:10.3969/j.issn.1009-0029.2019.03.026 [本文引用: 1]
智能语音控制系统设计
[J].
Design of intelligent voice control system
[J].DOI:10.3969/j.issn.1001-182X.2019.01.062 [本文引用: 1]
智能语音控制系统设计与研究
[J].
Design and research of intelligent speech control system
[J].DOI:10.3969/j.issn.1674-6236.2019.22.002 [本文引用: 1]
基于LD3320的语音控制和自动避障的智能小车设计
[J].
Design of intelligent car with voice control and automatic obstacle avoidance based on LD3320
[J].
基于LD3320的环卫车智能语音控制系统
[J].
Intelligent voice control system of sanitation vehicle based on LD3320
[J].
基于STM32F407的电磁阀控制器设计
[J].
Design of solenoid valve controller based on STM32F407 chip
[J].
基于STM32的智能语音控制系统设计
[J].
Design of intelligent voice control system based on STM32
[J].DOI:10.47939/et.v2i1.103 [本文引用: 1]
基于语音控制的自动进样器系统设计
[J].
Design of automatic sampler system based on speech control
[J].
基于语音识别的智能家居控制系统设计
[J].
Design of smart home control system based on speech recognition
[J].
基于凸优化的举高消防车时间最优轨迹规划
[J].
Time optimal trajectory planning of elevating fire truck based on convex optimization
[J].DOI:10.3901/jme.2019.06.138 [本文引用: 1]
基于PLC的电液比例控制试验台控制系统设计研究
[D].
Design and research on control system of electro-hydraulic proportional control test bench based on PLC
[D].
消防车控制参数保护系统的设计与研究
[J].
Design and research of the control parameter protection system of fire trucks
[J].
基于时频联合损失函数的语音增强算法
[J].
Speech enhancement algorithm based on time-frequency joint loss function
[J].
复杂环境下基于自适应深度神经网络的鲁棒语音识别
[J].
Robust speech recognition based on adaptive deep neural network in complex environment
[J].DOI:10.3969/j.issn.1007-130X.2022.06.019 [本文引用: 1]
举高消防车安全限位保护装置的检测技术研究
[C]//
Research on detection technology of safety limit protection device for aerial fire fighting vehicle
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}