| Robotic and Mechanism Design |
|

|
|
|
| Research on design of building trash bin handling robot |
Zhigang LI( ),Junpeng ZOU,Xiang YANG ),Junpeng ZOU,Xiang YANG |
| School of Mechatronics and Vehicle Engineering, East China Jiaotong University, Nanchang 330013, China |
|
|
|
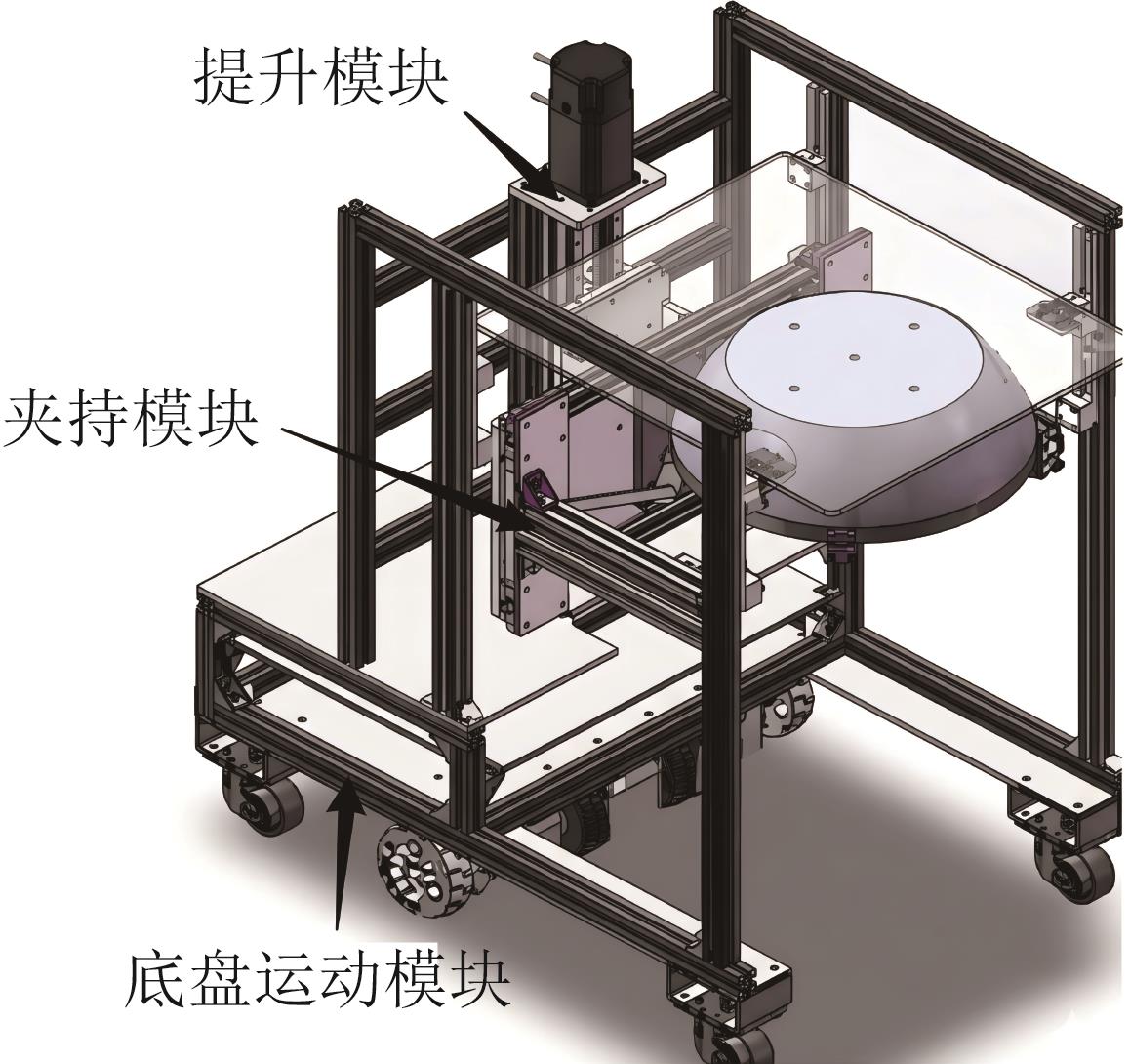
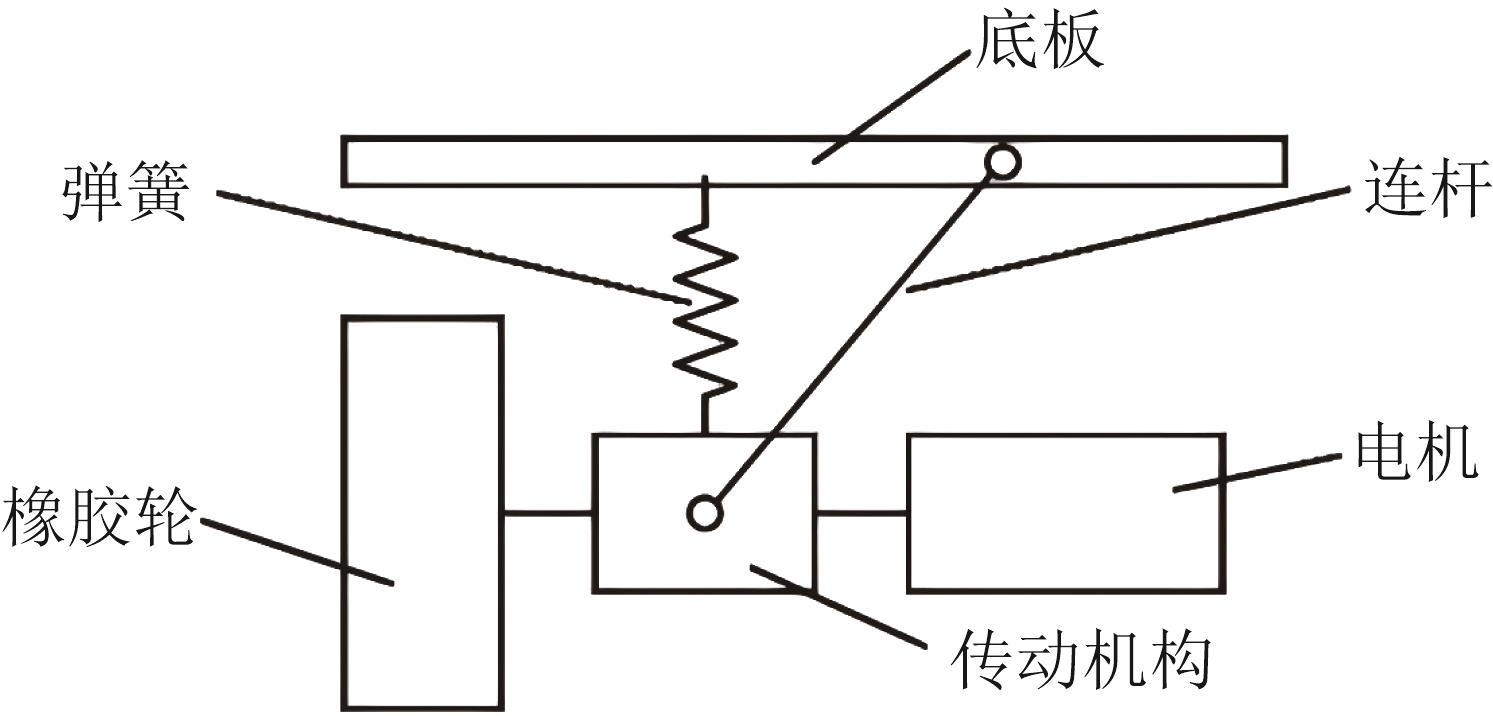
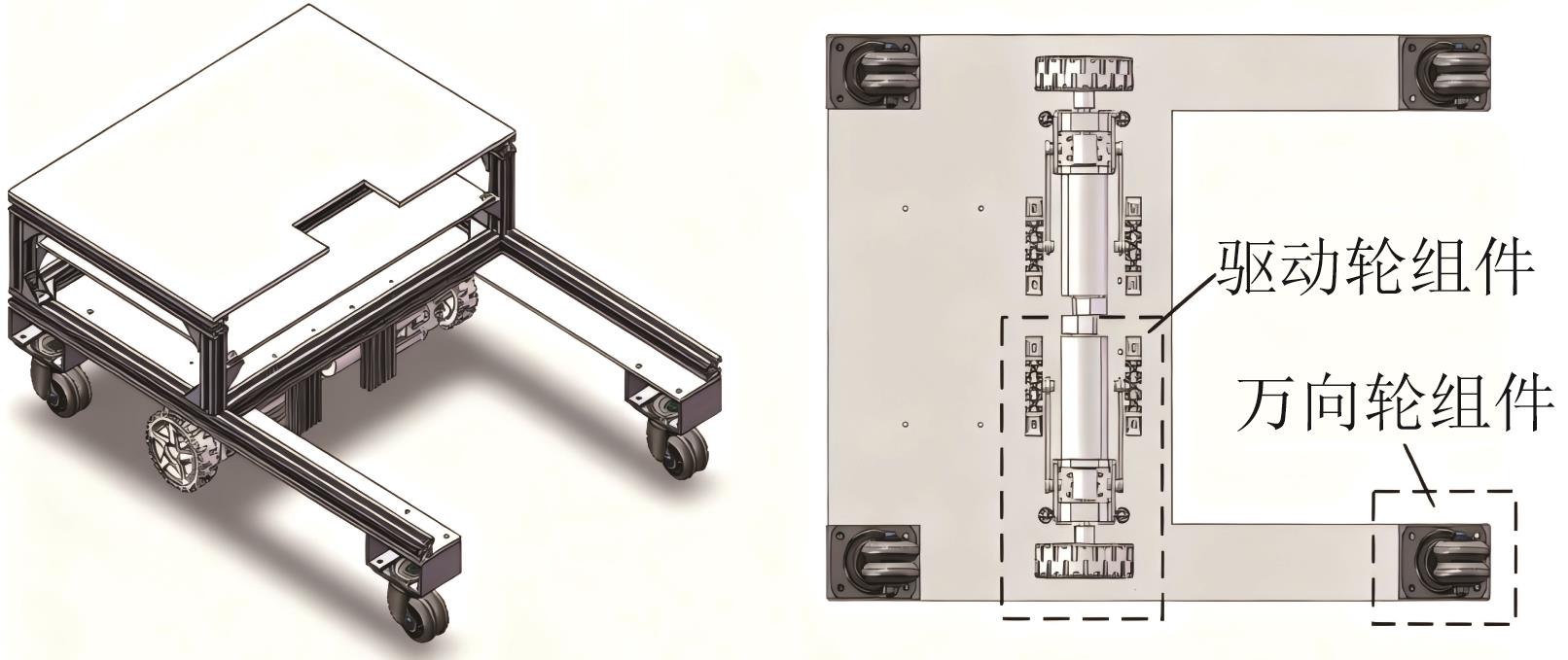
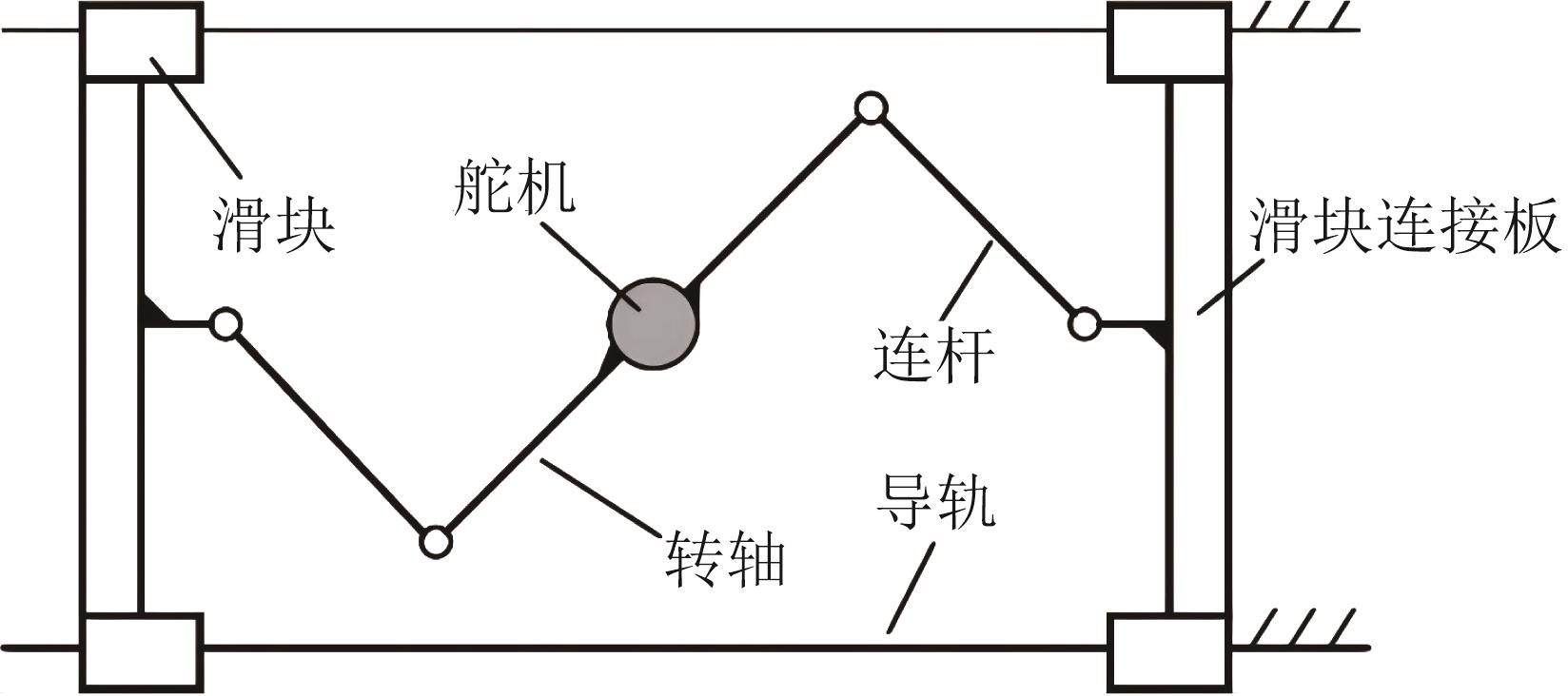
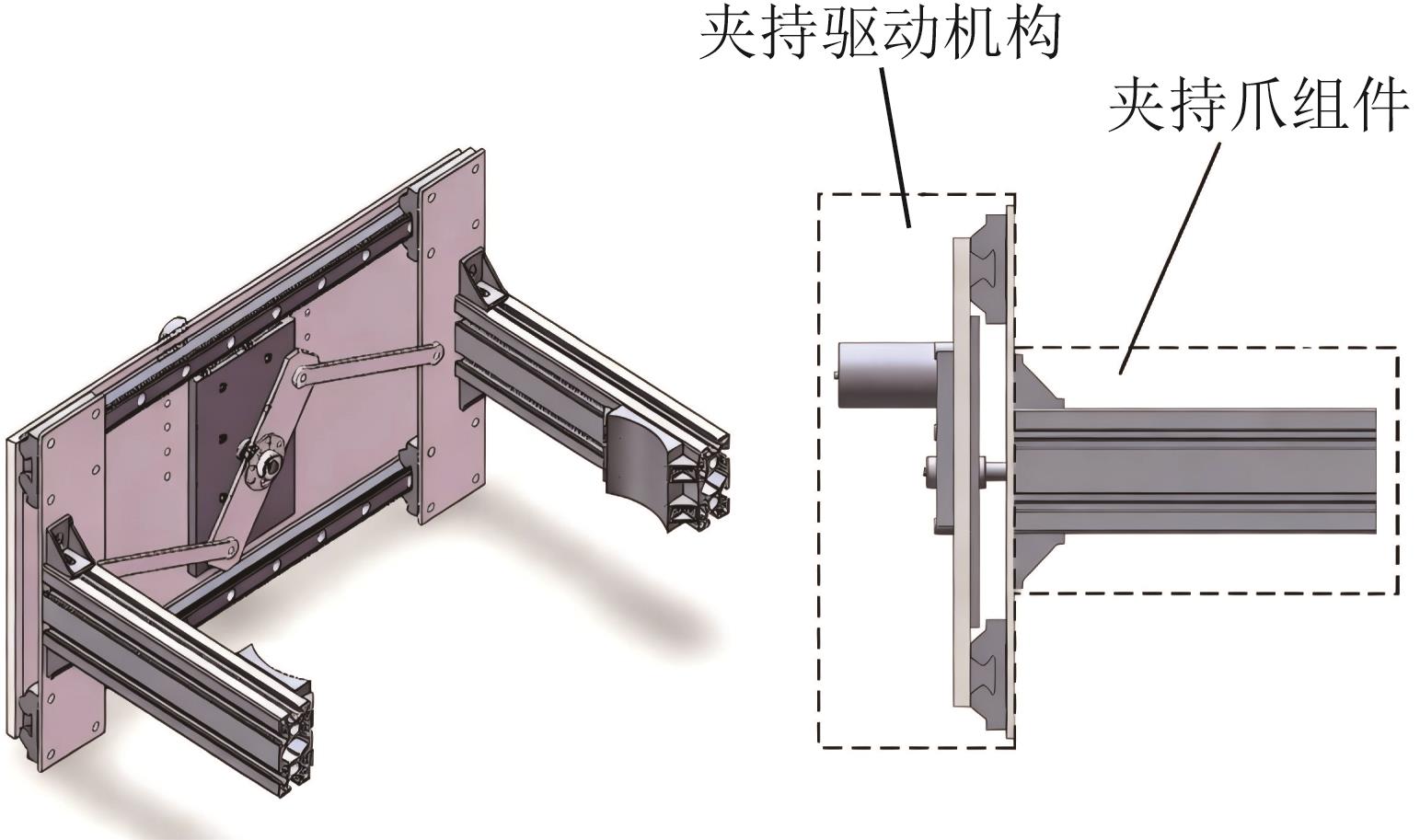
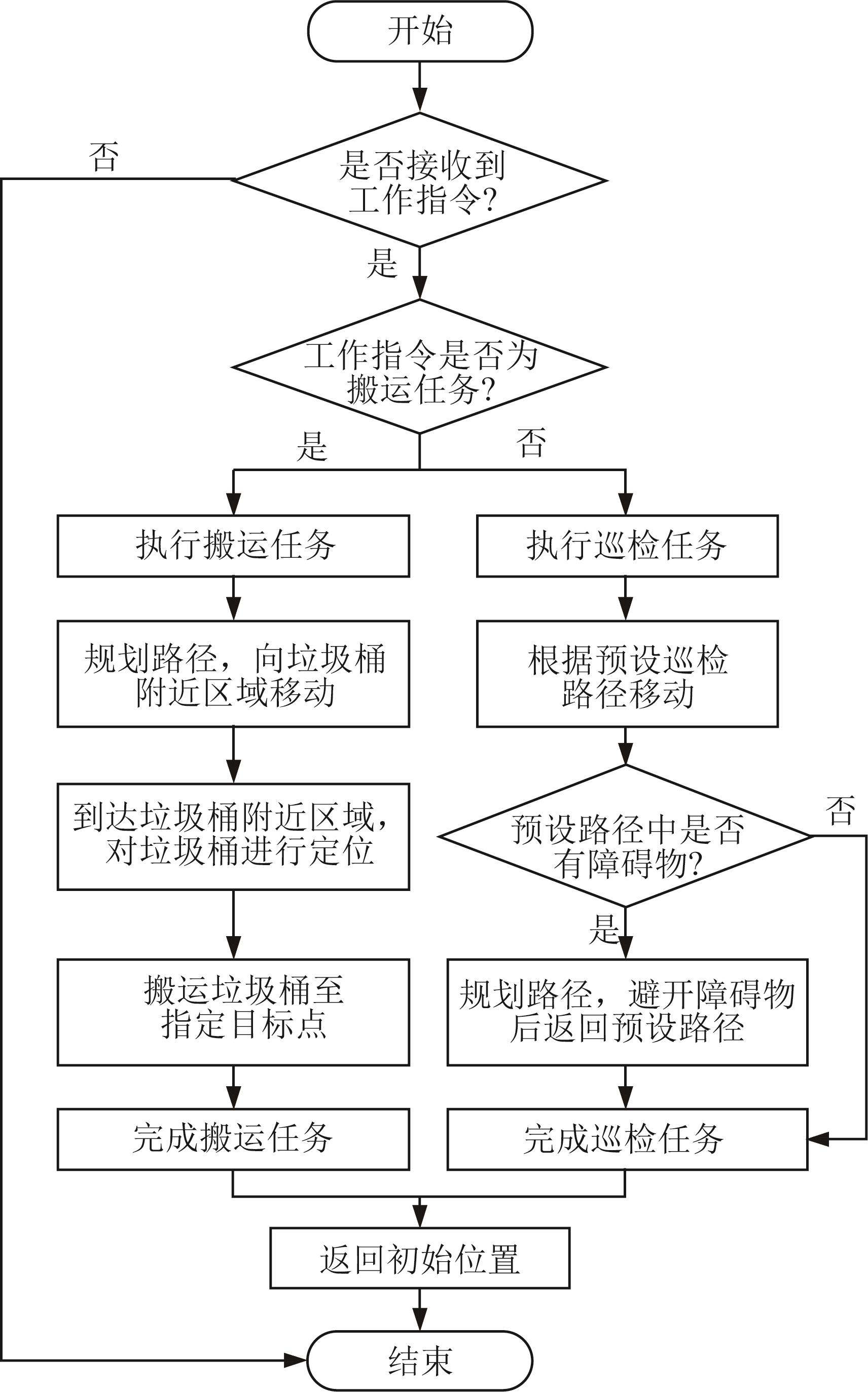
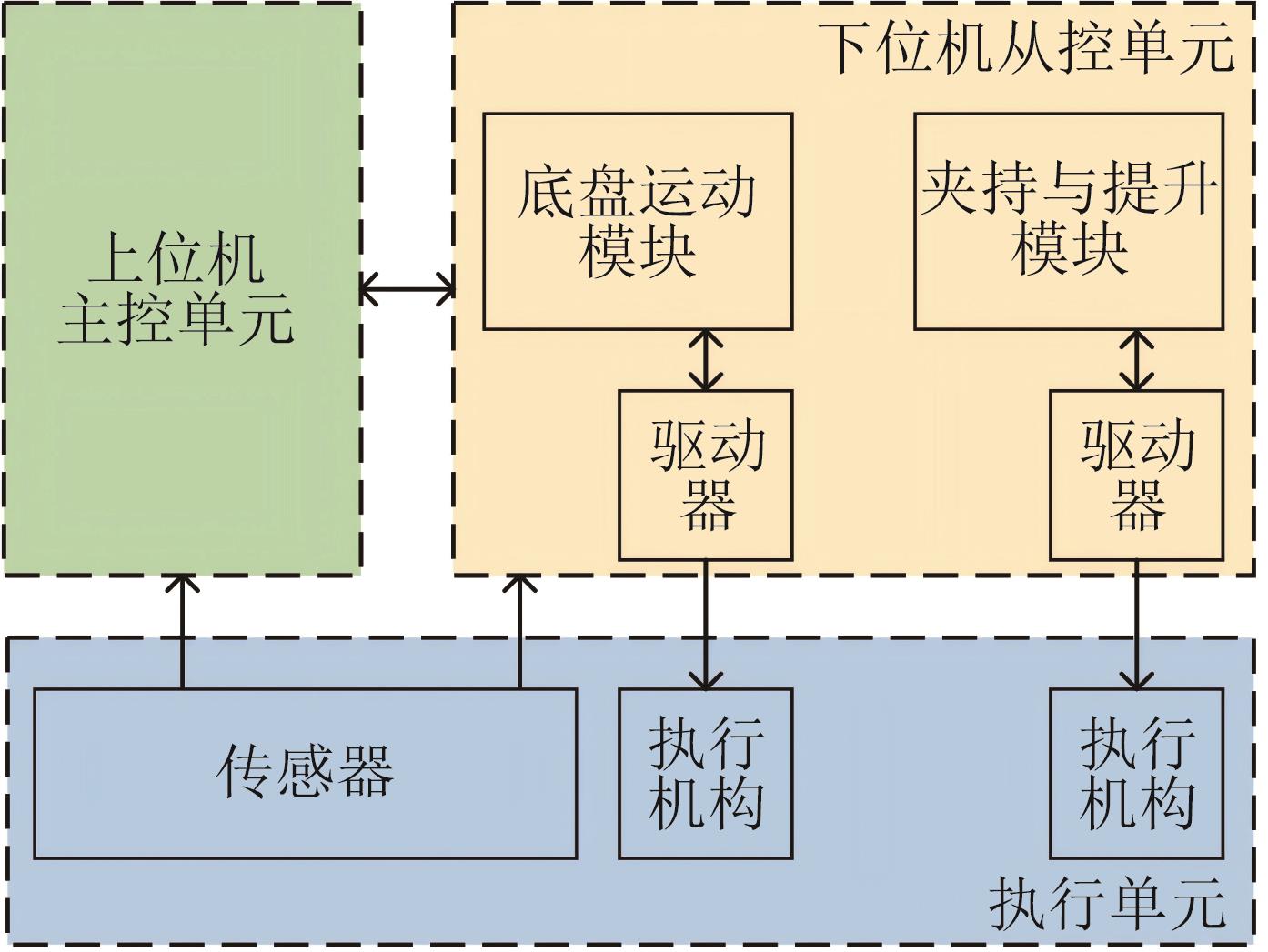
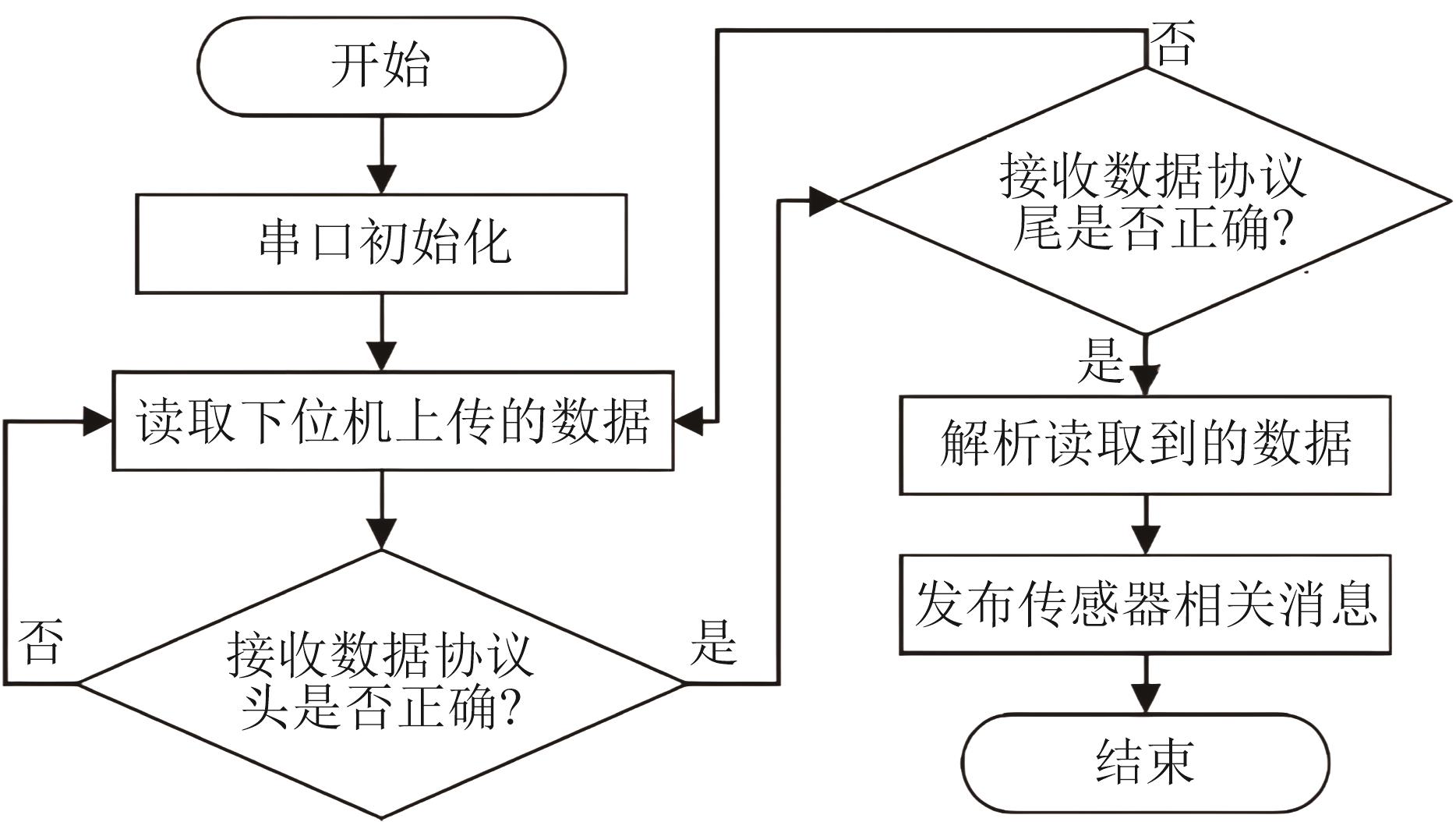
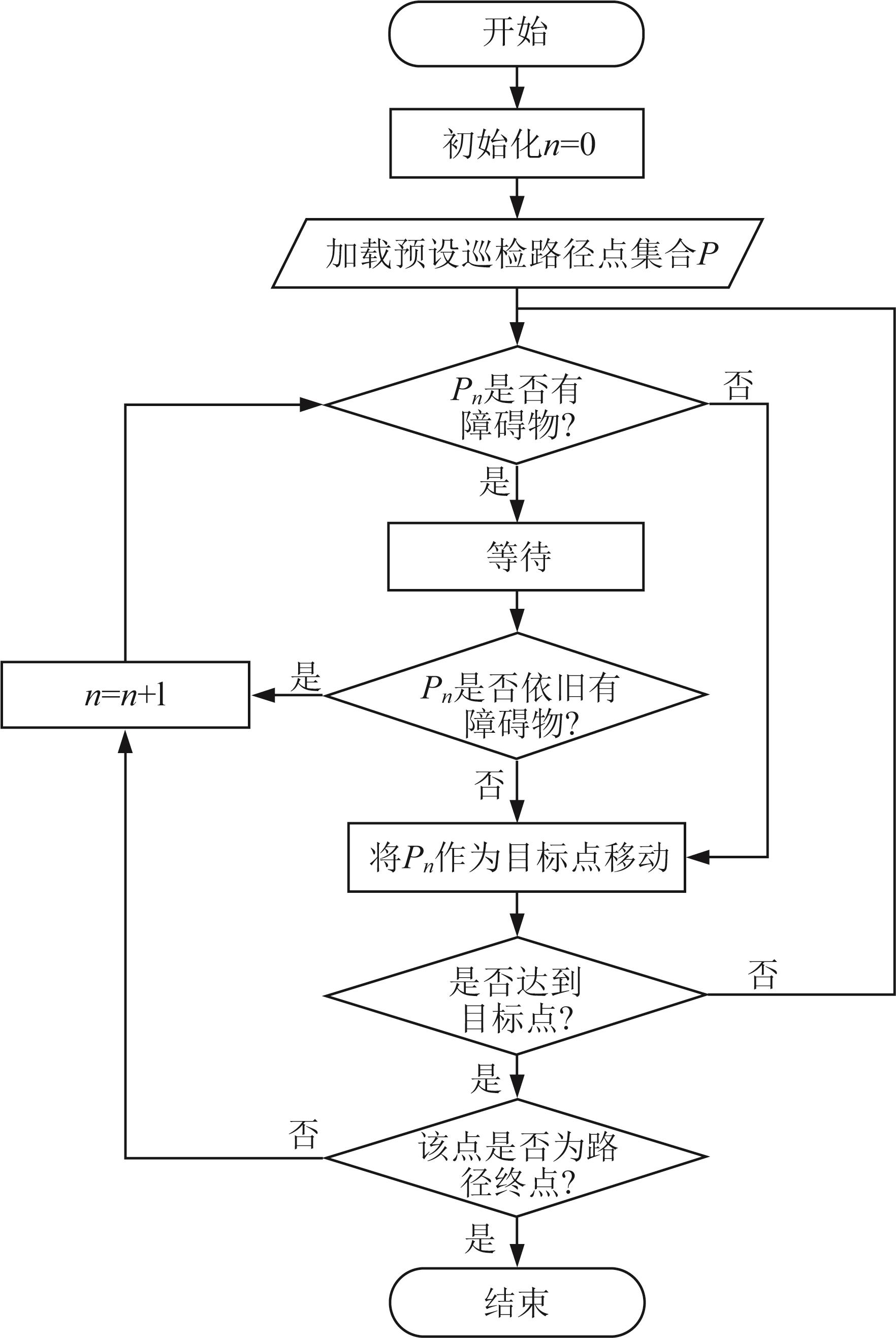
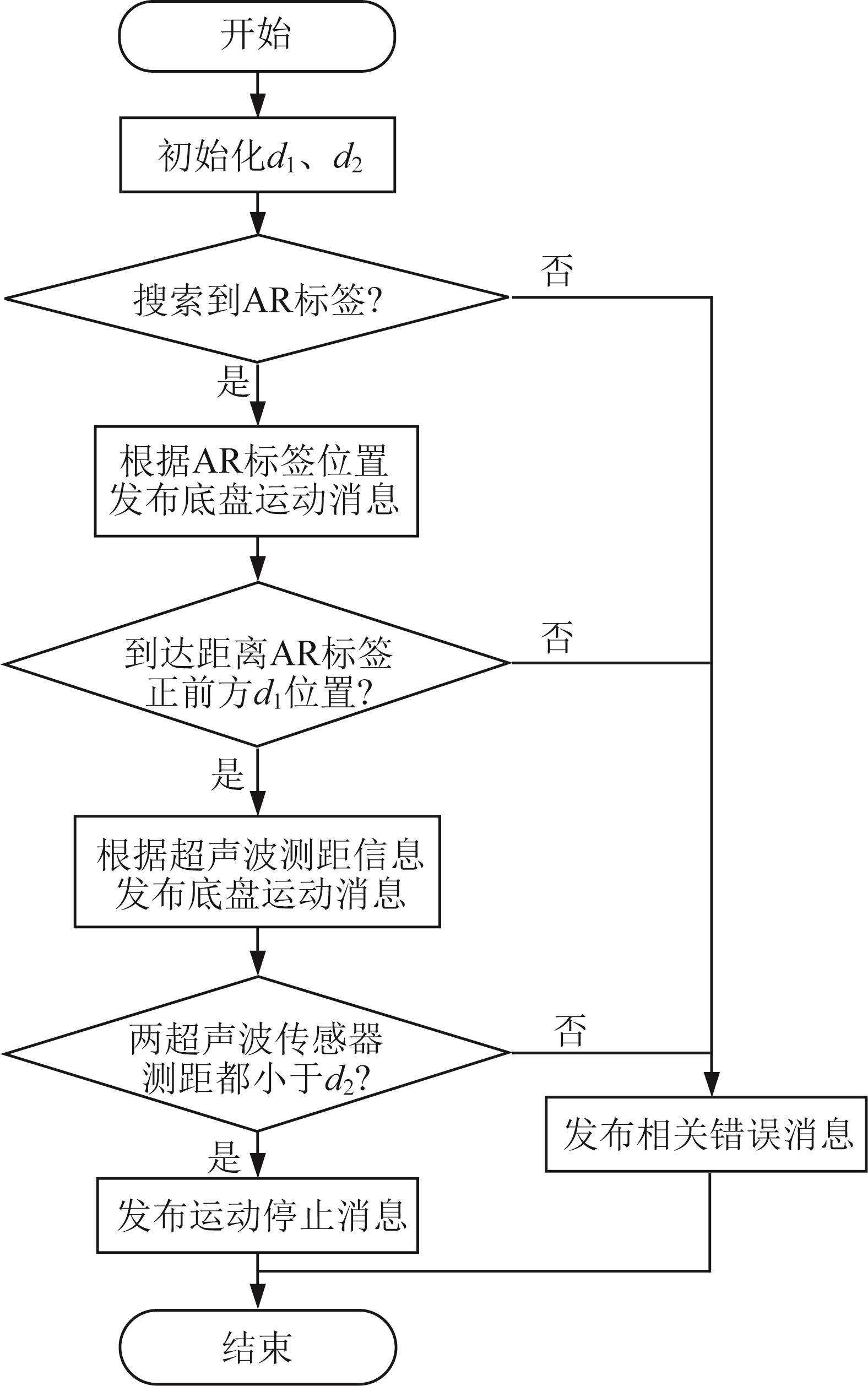
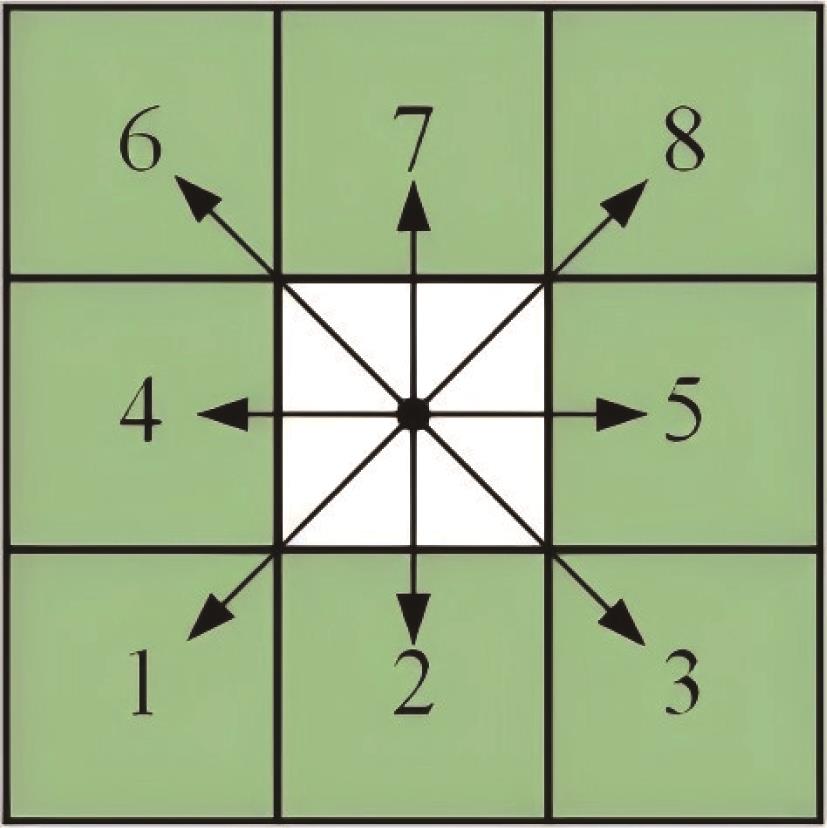
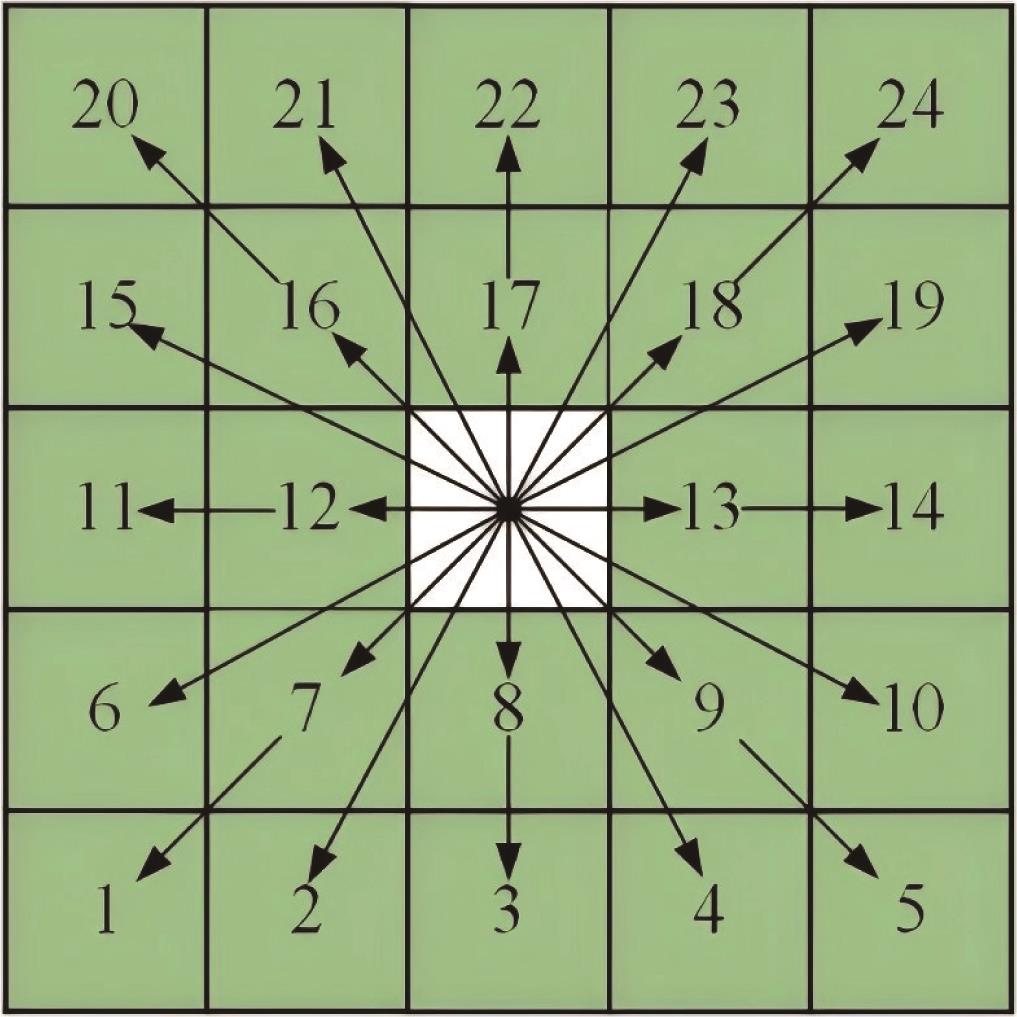
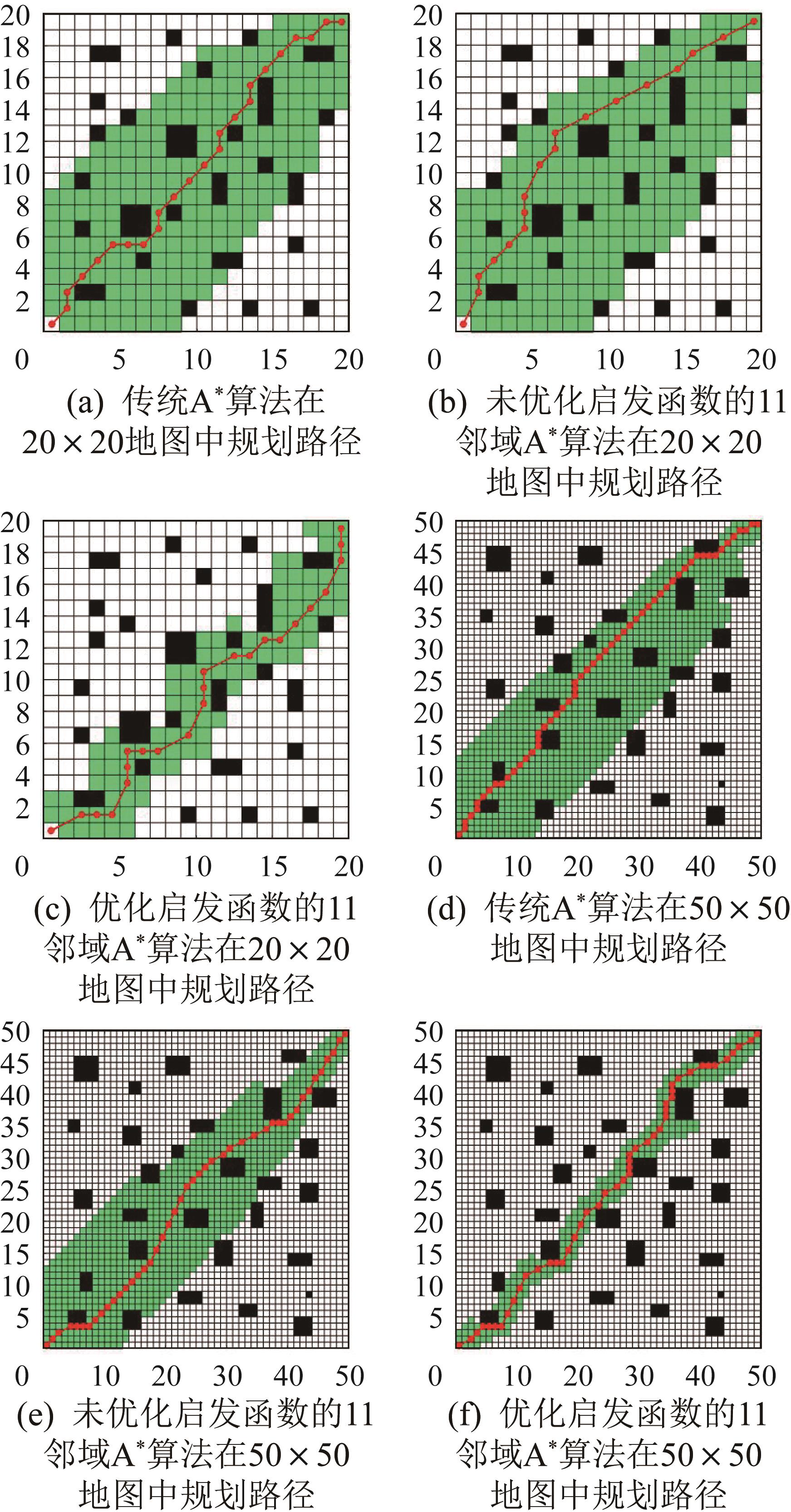
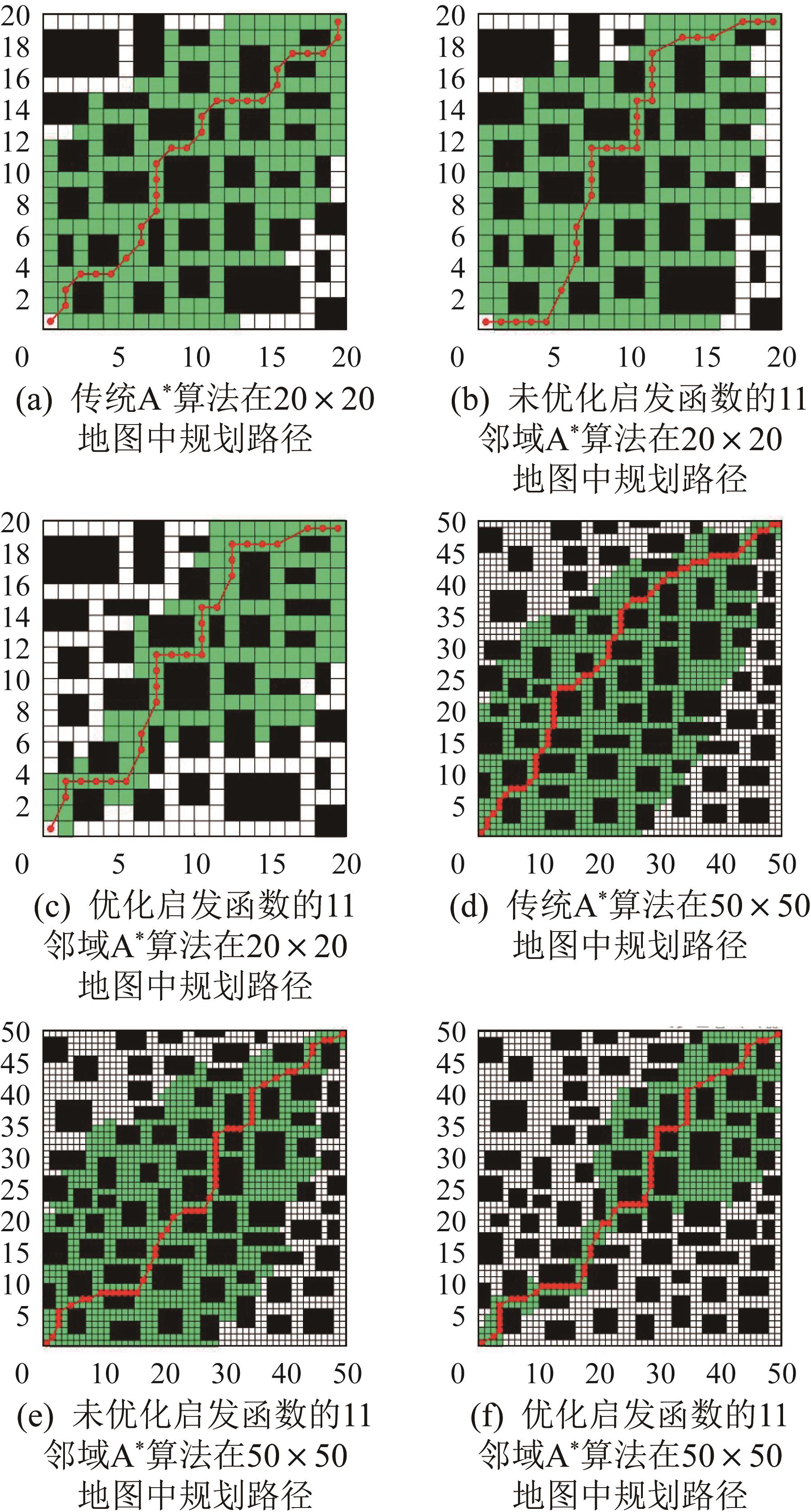
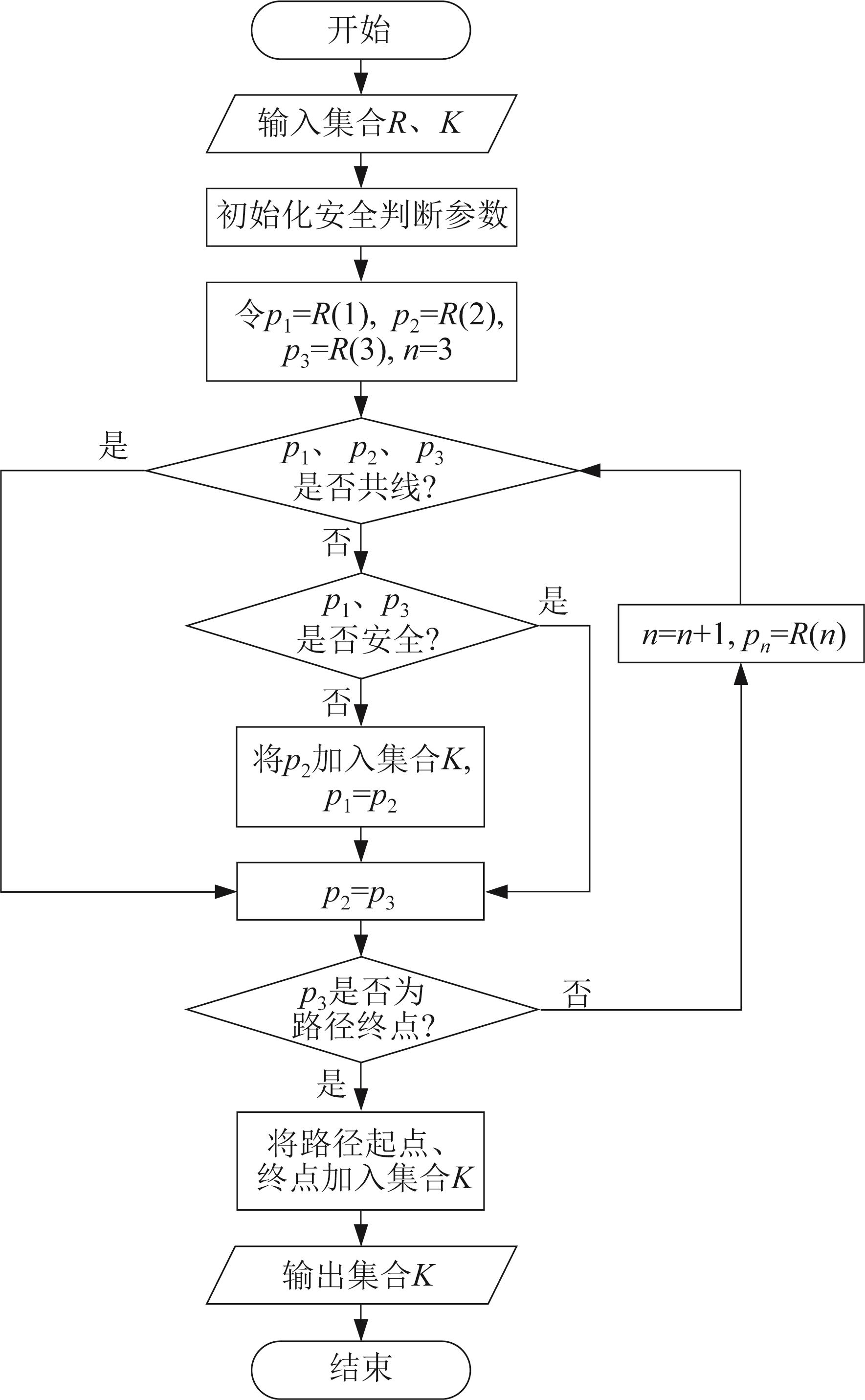
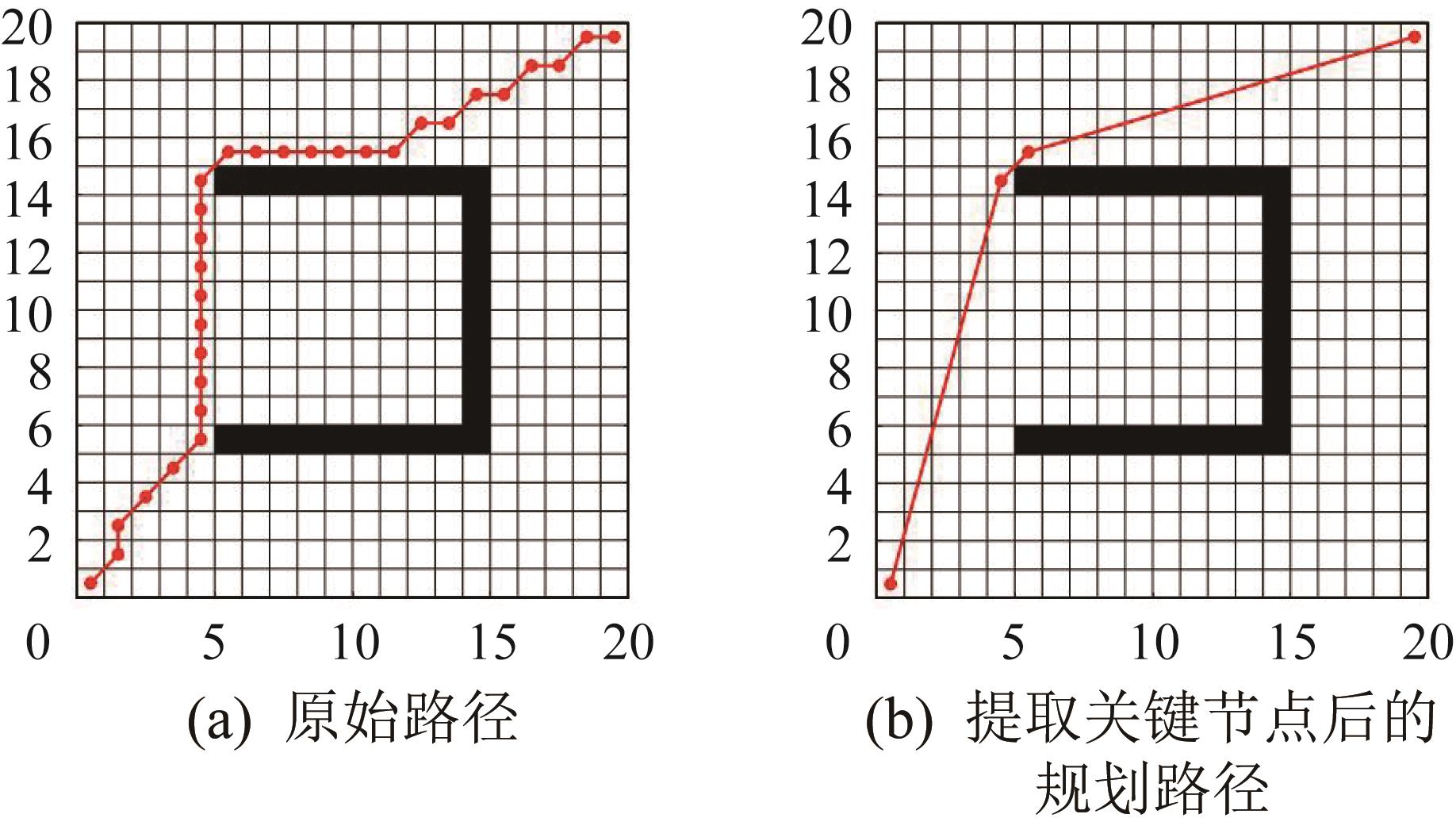
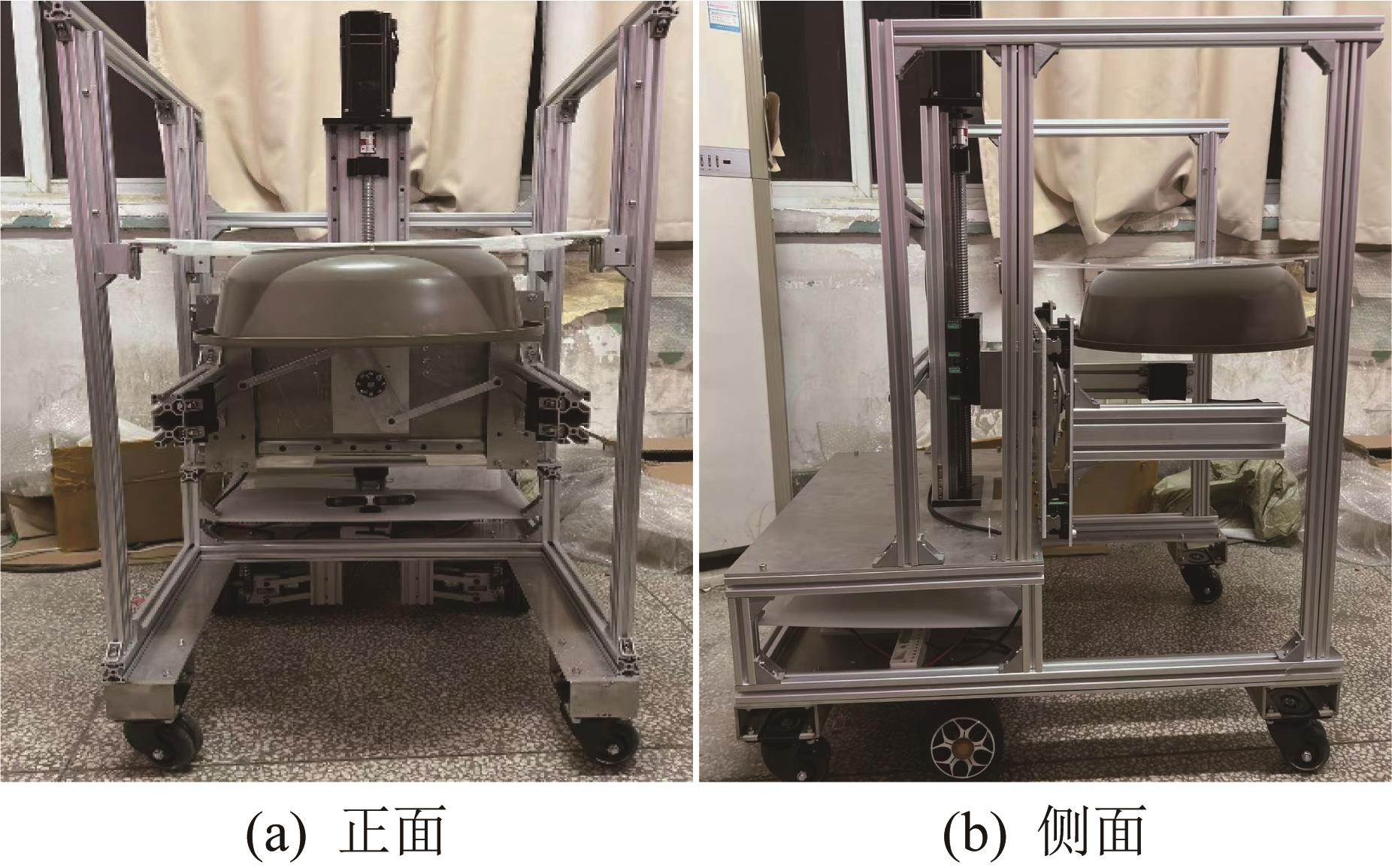
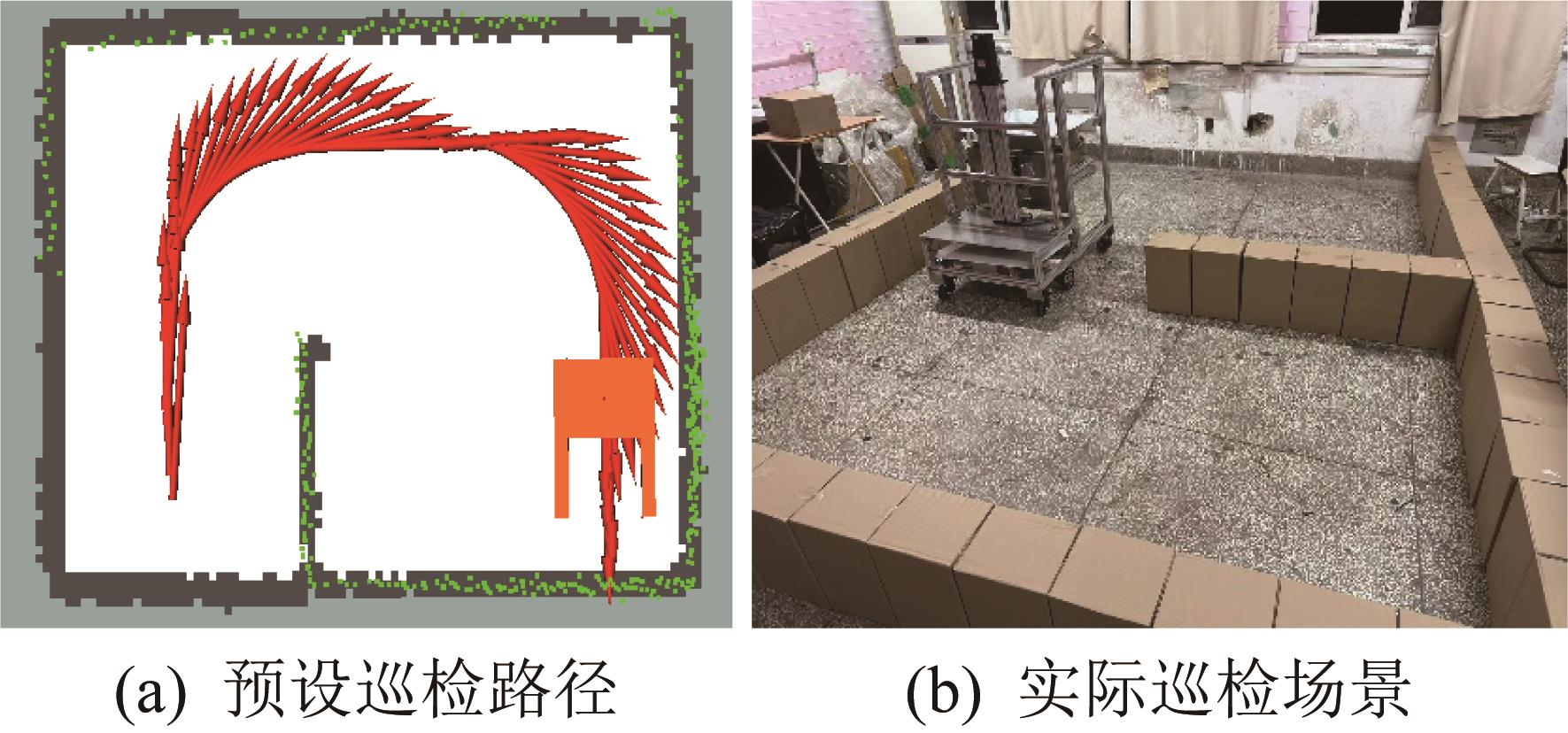
Abstract Trash cleaning in modern buildings mainly relies on manual labor, which suffers from high intensity and low efficiency. Meanwhile, general mobile robots face issues such as poor path smoothness and low computational efficiency in complex environments like narrow corridors. To address these issues, a building trash bin handling robot was designed. First, the mechanical structure of the robot was designed, consisting of a two-wheel differential drive chassis module, a lifting module, and a servo-driven clamping module to ensure the stable grasping of trash bins. Then, a hierarchical control system was built based on ROS and μC/OS. Furthermore, an improved A* algorithm was proposed, which adopted a hierarchical directional neighborhood search strategy to optimize search efficiency, introduced an adaptive dual-weight heuristic function to avoid local optimal solutions, and utilized a key node extraction strategy to remove redundant nodes, thereby achieving path optimization. Simulation results showed that search time was reduced by up to 44%, and the number of search nodes was reduced by 50%- 80%. The designed robot successfully completed autonomous navigation, inspection, and trash bin handling tasks in prototype testing, verifying its feasibility and effectiveness in building environments.
|
|
Received: 25 August 2025
Published: 27 June 2026
|
|
|
楼宇垃圾桶搬运机器人设计研究
现代楼宇垃圾清理主要依赖人工,劳动强度大、工作效率低,而通用移动机器人在狭窄走廊等复杂环境中存在路径平滑性差、计算效率低等问题。为此,设计了一种楼宇垃圾桶搬运机器人。首先,设计机器人的机械结构,包括由两轮差速驱动的底盘运动模块、提升模块以及由舵机驱动的夹持模块,以保障垃圾桶的稳定抓取。其次,搭建基于ROS与μC/OS操作系统的分层控制系统。进一步地,提出一种改进A*算法,采用分层定向邻域搜索策略提升搜索效率,引入自适应双权重启发函数以规避局部最优解,并利用关键节点提取策略剔除冗余节点,从而实现路径优化。仿真结果表明,改进算法的搜索时间最大降幅达到44%,搜索节点数量减少了50%~80%。所设计的机器人在样机测试中成功完成了自主导航、巡检与垃圾桶搬运任务,验证了其在楼宇环境中的可行性与有效性。
关键词:
楼宇机器人,
控制系统,
A*算法,
路径规划
|
|
| [[1]] |
王耀南, 江一鸣, 姜娇, 等. 机器人感知与控制关键技术及其智能制造应用[J]. 自动化学报, 2023, 49(3): 494-513.
WANG Y N, JIANG Y M, JIANG J, et al. Key technologies of robot perception and control and its intelligent manufacturing applications[J]. Acta Automatica Sinica, 2023, 49(3): 494-513.
|
|
|
| [[2]] |
丁腾腾. 室内搬运机器人系统设计与实现[D]. 南京: 南京信息工程大学, 2023.
DING T T. Design and implementation of indoor handling robot system[D]. Nanjing: Nanjing University of Information Science & Technology, 2023.
|
|
|
| [[3]] |
胡明柱. 差速移动机器人驱动控制系统设计与研究[D]. 无锡: 江南大学, 2022.
HU M Z. Design and research on driving control system for differential mobile robot[D]. Wuxi: Jiangnan University, 2022.
|
|
|
| [[4]] |
林辉, 李猛, 姜雨田, 等. 差速轮式移动机器人控制系统设计[J]. 科技创新与应用, 2024, 14(11): 41-44.
LIN H, LI M, JIANG Y T, et al. Design of the control system for a differential wheeled mobile robot[J]. Technology Innovation and Application, 2024, 14(11): 41-44.
|
|
|
| [[5]] |
刘建猛. 基于嵌入式实时系统的移动机器人控制系统设计[D]. 绵阳: 西南科技大学, 2021.
LIU J M. Design of mobile robot control system based on embedded real-time system[D]. Mianyang: Southwest University of Science and Technology, 2021.
|
|
|
| [[6]] |
袁铭. 面向楼宇内多场景环境的四足机器人自主导航系统设计[D]. 济南: 山东大学, 2024.
YUAN M. Design of autonomous navigation system for quadruped robot in multi-scene environment of buildings[D]. Jinan: Shandong University, 2024.
|
|
|
| [[7]] |
朱青松. 移动机器人楼宇服务建图与导航关键技术研究[D]. 杭州: 浙江大学, 2023.
ZHU Q S. Research on key technologies of mapping and navigation for building services mobile robot[D]. Hangzhou: Zhejiang University, 2023.
|
|
|
| [[8]] |
赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910.
ZHAO X, WANG Z, HUANG C K, et al. Mobile robot path planning based on an improved A* algorithm[J]. Robot, 2018, 40(6): 903-910.
|
|
|
| [[9]] |
苏畅, 张曼. 基于改进A*算法的机器人路径规划[J]. 兰州工业学院学报, 2025, 32(1): 103-106.
SU C, ZHANG M. Robot path planning based on improved A* algorithm[J]. Journal of Lanzhou Institute of Technology, 2025, 32(1): 103-106.
|
|
|
| [[10]] |
胡铮, 徐斌. 融合A*算法与人工势场法的动态路径规划[J]. 组合机床与自动化加工技术, 2023(7): 46-49, 56.
HU Z, XU B. Dynamic path planning based on the integration of A* algorithm and artificial potential field method[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2023(7): 46-49, 56.
|
|
|
| [[11]] |
何育博, 蔡龙帅, 许乐. 基于改进A*算法的移动机器人路径规划[J]. 南方农机, 2024, 55(18): 31-34.
HE Y B, CAI L S, XU L. Path planning of mobile robot based on improved A* algorithm[J]. China Southern Agricultural Machinery, 2024, 55(18): 31-34.
|
|
|
| [[12]] |
LIU A X, LIU H J. Path planning of intelligent robots based on improved A* algorithm[J]. Journal of Physics: Conference Series, 2025, 3055(1): 012001.
|
|
|
| [[13]] |
MIN H T, XIONG X Y, WANG P Y, et al. Autonomous driving path planning algorithm based on improved A* algorithm in unstructured environment[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2/3): 513-526.
|
|
|
| [[14]] |
XIONG X Y, MIN H T, YU Y B, et al. Application improvement of A* algorithm in intelligent vehicle trajectory planning[J]. Mathematical Biosciences and Engineering, 2021, 18(1): 1-21.
|
|
|
| [[15]] |
胡国华, 高丽英. 基于改进A*算法的无人车路径规划研究[J]. 忻州师范学院学报, 2025, 41(2): 30-33.
HU G H, GAO L Y. Research on path planning for unmanned vehicles based on improved A* algorithm[J]. Journal of Xinzhou Normal University, 2025, 41(2): 30-33.
|
|
|
| [[16]] |
槐创锋, 郭龙, 贾雪艳, 等. 改进A*算法与动态窗口法的机器人动态路径规划[J]. 计算机工程与应用, 2021, 57(8): 244-248.
HUAI C F, GUO L, JIA X Y, et al. Improved A* algorithm and dynamic window method for robot dynamic path planning[J]. Computer Engineering and Applications, 2021, 57(8): 244-248.
|
|
|
| [[17]] |
高欣宇, 田国富. 融合改进A*和TEB算法的机器人路径规划[J]. 组合机床与自动化加工技术, 2023(8): 42-46, 51.
GAO X Y, TIAN G F. Robot path planning based on the fusion of improved A* and TEB algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2023(8): 42-46, 51.
|
|
|
| [[18]] |
董雅文, 杨静雯, 刘文慧, 等. 基于改进A*算法的机器人全覆盖衔接路径规划[J]. 传感器与微系统, 2023, 42(9): 125-128.
DONG Y W, YANG J W, LIU W H, et al. Improved A* algorithm for robot full coverage connection path planning[J]. Transducer and Microsystem Technologies, 2023, 42(9): 125-128.
|
|
|
| [[19]] |
李长庚. 改进A*算法和动态窗口法的移动机器人路径规划研究[D]. 重庆: 重庆理工大学, 2022.
LI C G. Research on path planning of mobile robot based on improved A* algorithm and dynamic window method[D]. Chongqing: Chongqing University of Technology, 2022.
|
|
|
| [[20]] |
刘志超, 李金凤, 王海超. 融合改进A*和DWA算法的室内机器人路径规划[J]. 制造业自动化, 2025, 47(2): 51-58.
LIU Z C, LI J F, WANG H C. Indoor robot path planning incorporating improved A* algorithms and DWA[J]. Manufacturing Automation, 2025, 47(2): 51-58.
|
|
|
| [[21]] |
蔡浩. 电厂智能巡检机器人系统设计与实现[D]. 西安: 西安电子科技大学, 2024.
CAI H. Design and implementation of an intelligent inspection robot system for power plants[D]. Xi’an: Xidian University, 2024.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|