| Robotic and Mechanism Design |
|


|
|
|
| Real-time obstacle avoidance method via dynamic feature point remapping for robotic arm visual servoing |
Jun LIU1( ),Zina ZHU1(),Xueyun PAN1,Xiaoyan SUN2 ),Zina ZHU1(),Xueyun PAN1,Xiaoyan SUN2 |
1.School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
2.College of Civil Engineering and Architecture, Zhejiang University, Hangzhou 310058, China |
|
|
|
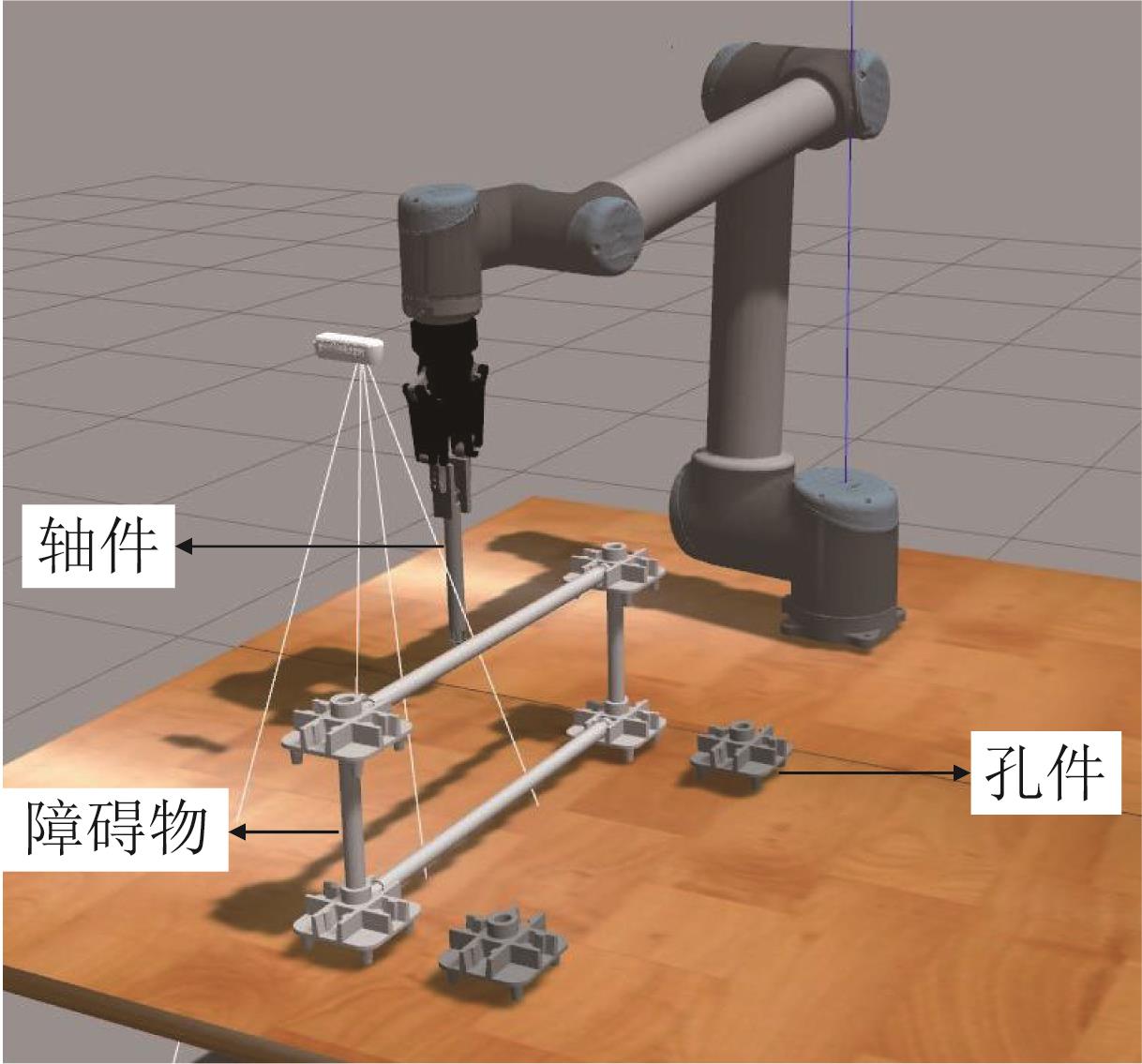
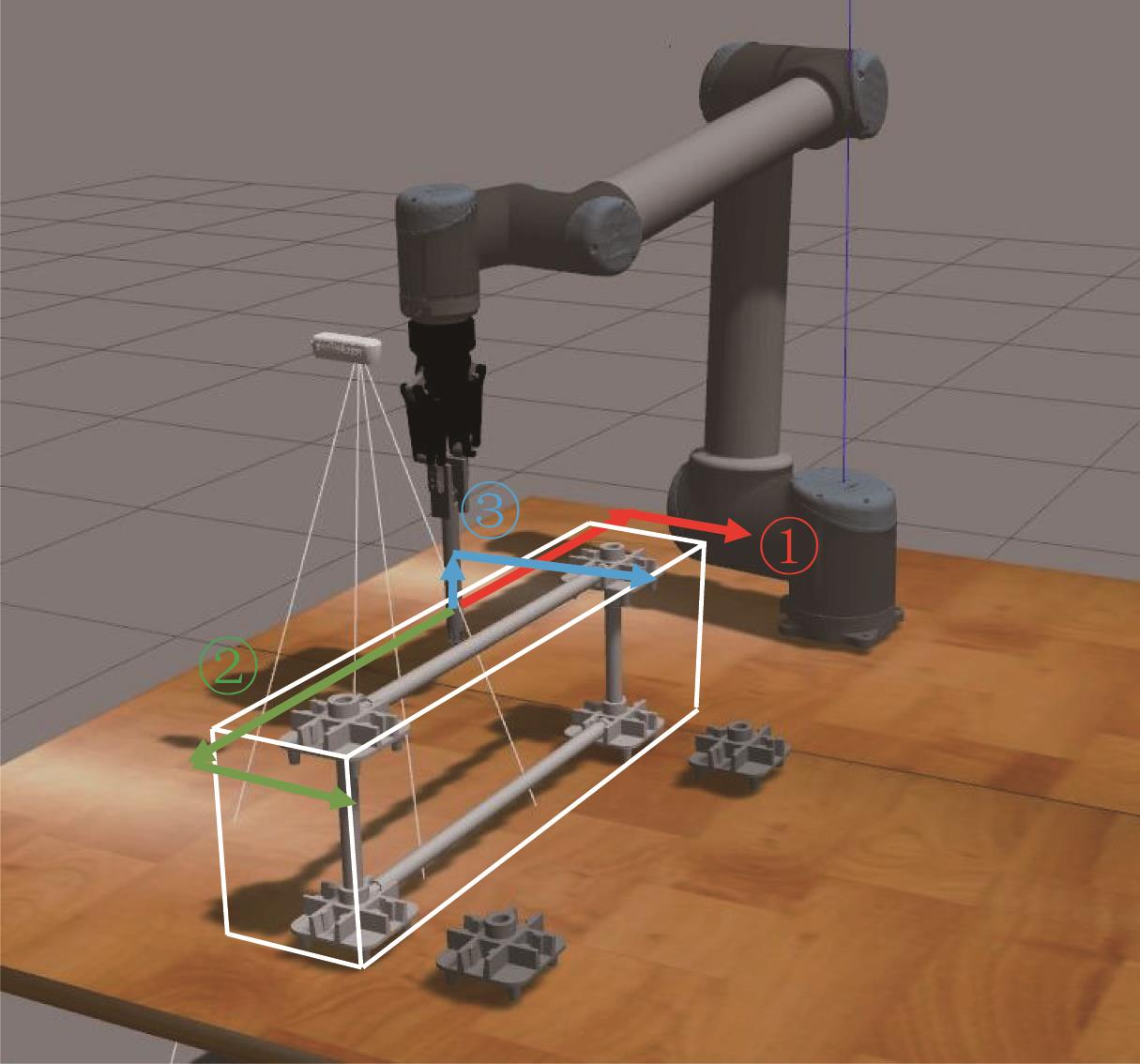
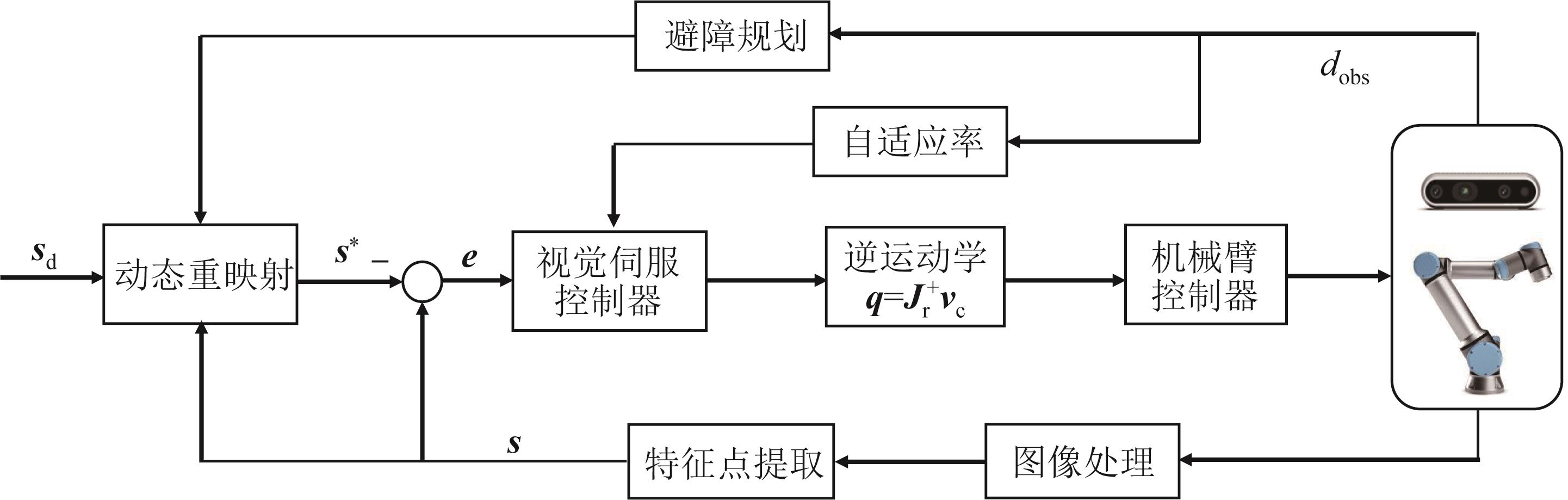
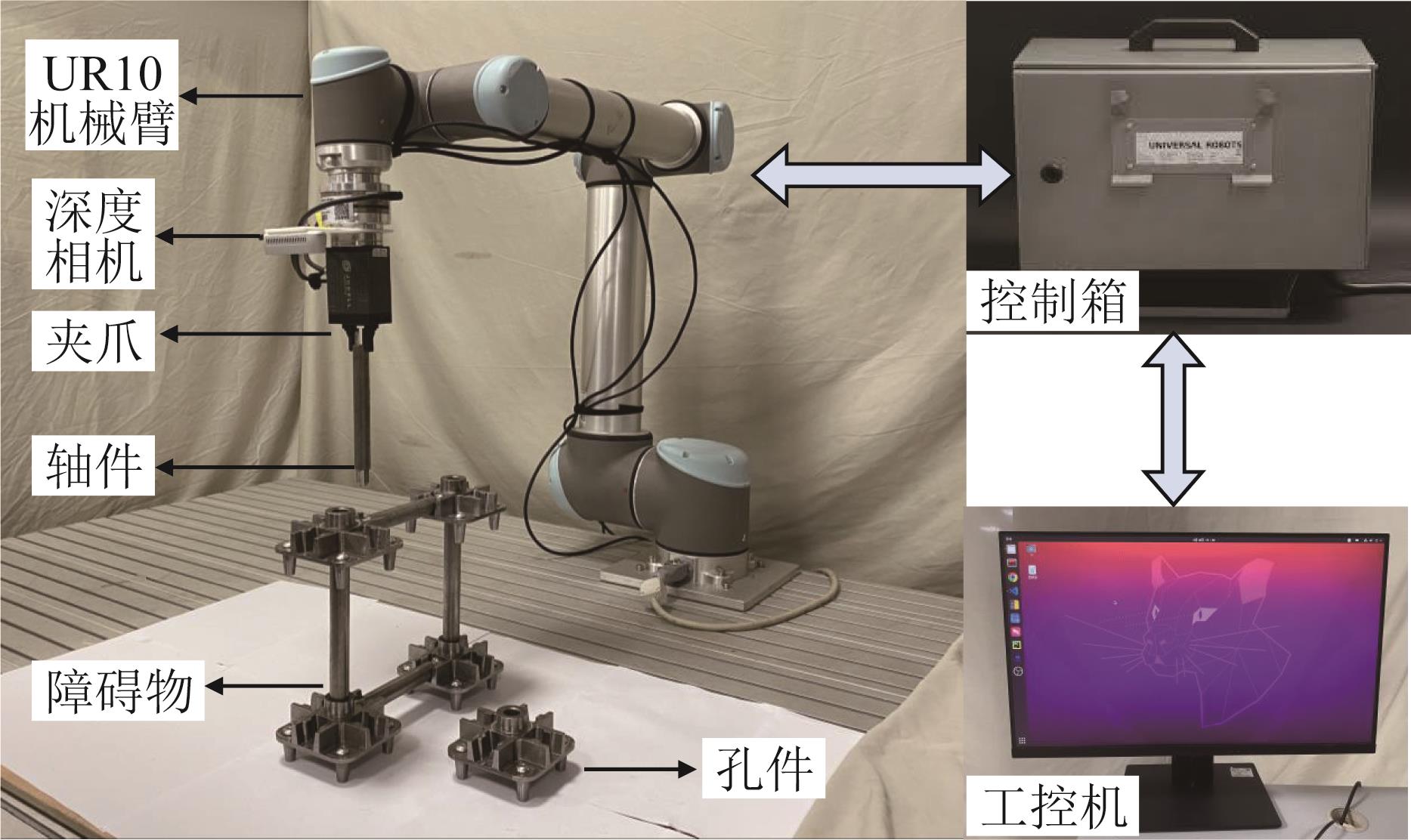
Abstract In high-precision assembly tasks, robotic arms need to avoid static obstacles. However, existing obstacle avoidance methods often interrupt the image-based visual servoing (IBVS) process, which affects task continuity and may induce motion oscillations, thereby reducing positioning accuracy. To address this issue, a real-time visual servoing obstacle avoidance method based on dynamic feature point remapping is proposed. This method constructed a multi-objective optimization model with field-of-view constraints using the geometric parameters of the smallest extensible cuboid of obstacles to solve an optimal avoidance path. Subsequently, the direction vector of the obstacle avoidance path was mapped into the image space, where guiding feature points were dynamically generated from real-time feature points to drive the IBVS controller to achieve obstacle avoidance. To improve motion smoothness, a path smoothing transition mechanism based on the Sigmoid function was designed, and an obstacle avoidance distance-driven adaptive gain function was introduced to dynamically optimize the system convergence rate. Finally, the global stability of the closed-loop system was proven through Lyapunov stability analysis. The axle-hole positioning experiments demonstrated that, under different initial poses, the method could generate feasible obstacle avoidance paths in real time, while the motion trajectories of the robotic arm end-effector and the feature points remained smooth without abrupt changes, achieving fast and high-precision convergence with an uninterrupted IBVS process throughout the task. The proposed method realizes a unified closed-loop integration of obstacle avoidance planning and IBVS control, which can provide a practical solution for real-time obstacle avoidance of robotic arms in high-precision assembly tasks requiring safety, continuity and accuracy.
|
|
Received: 27 June 2025
Published: 01 March 2026
|
|
|
|
Corresponding Authors:
Zina ZHU
E-mail: liujun8014@163.com;zhuzina@126.com
|
基于特征点动态重映射的机械臂视觉伺服实时避障方法
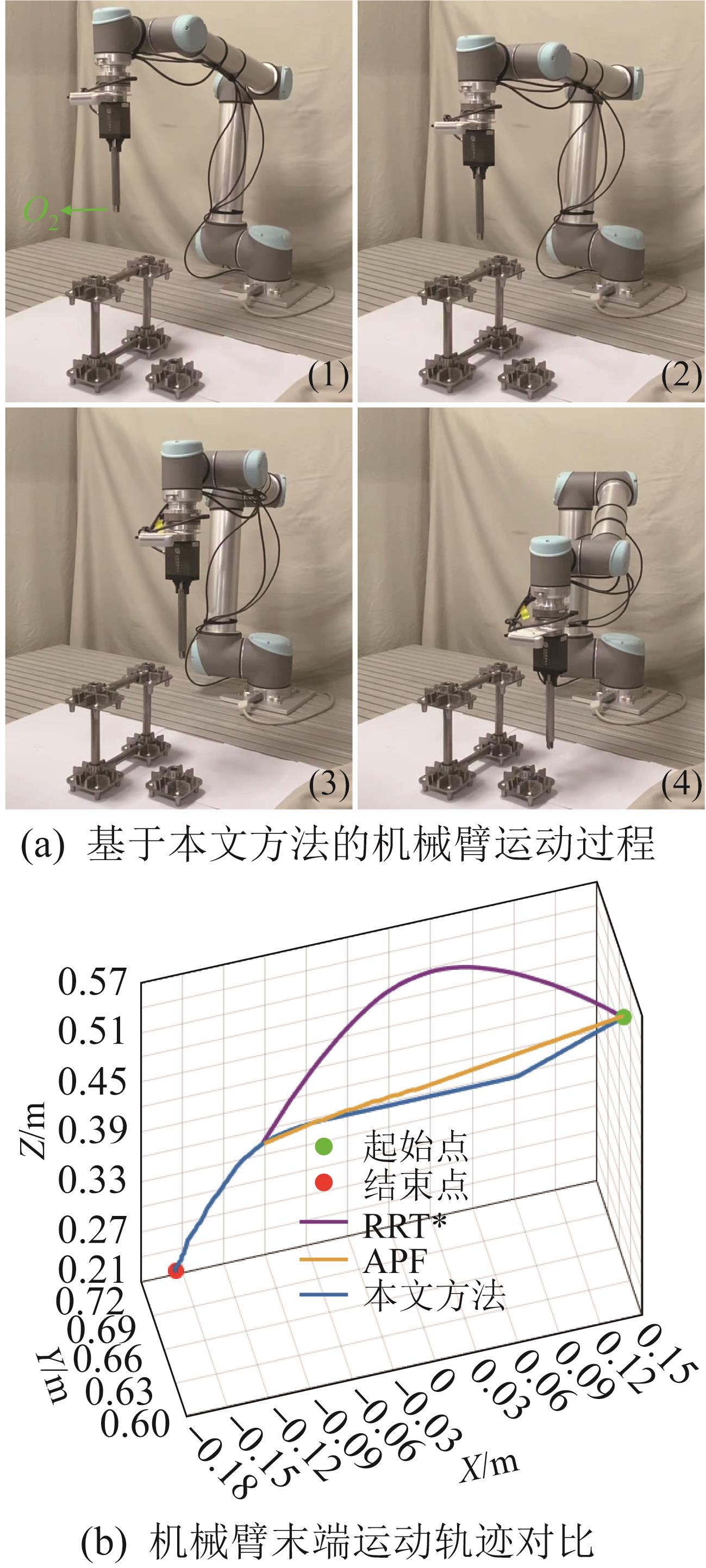
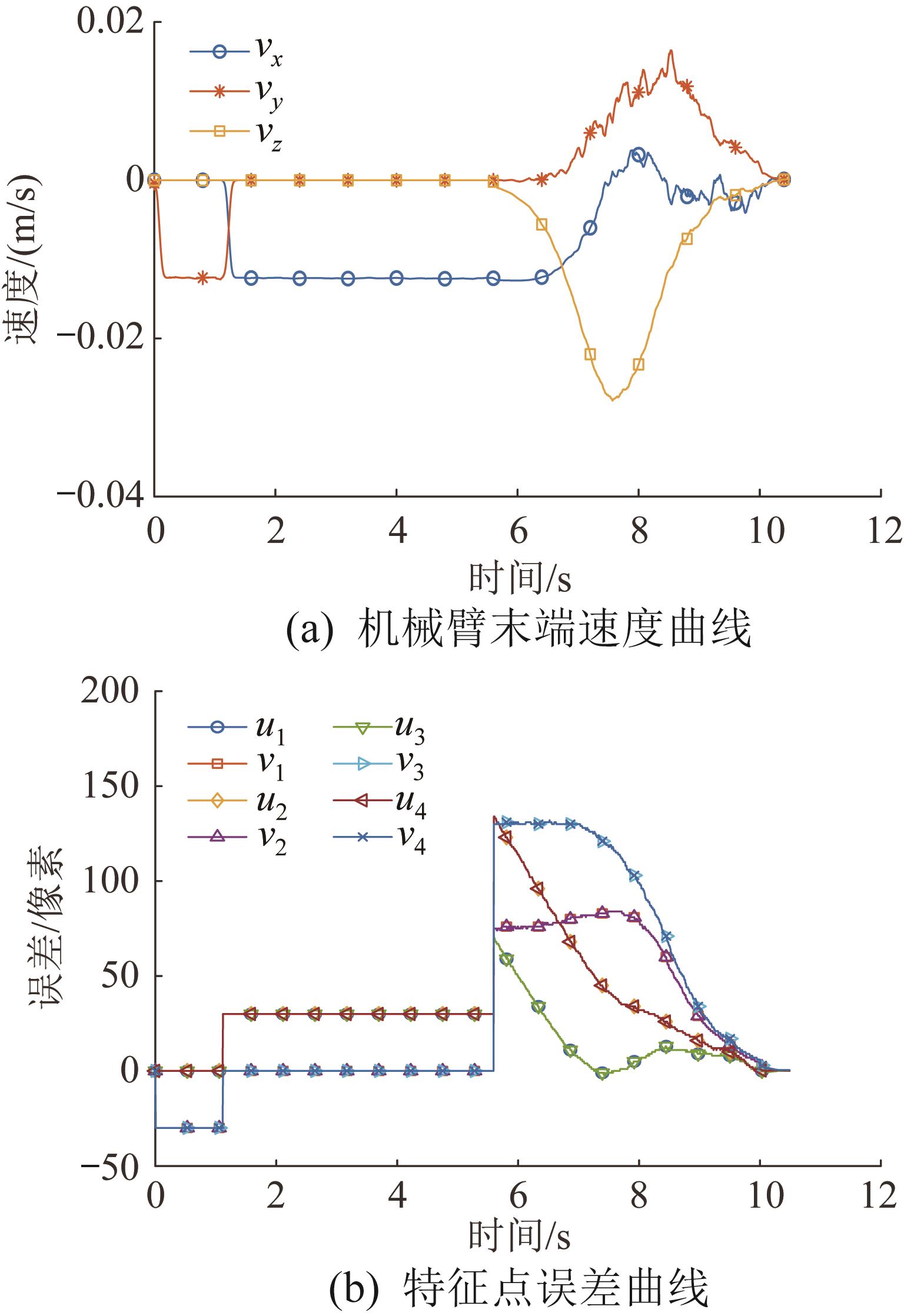
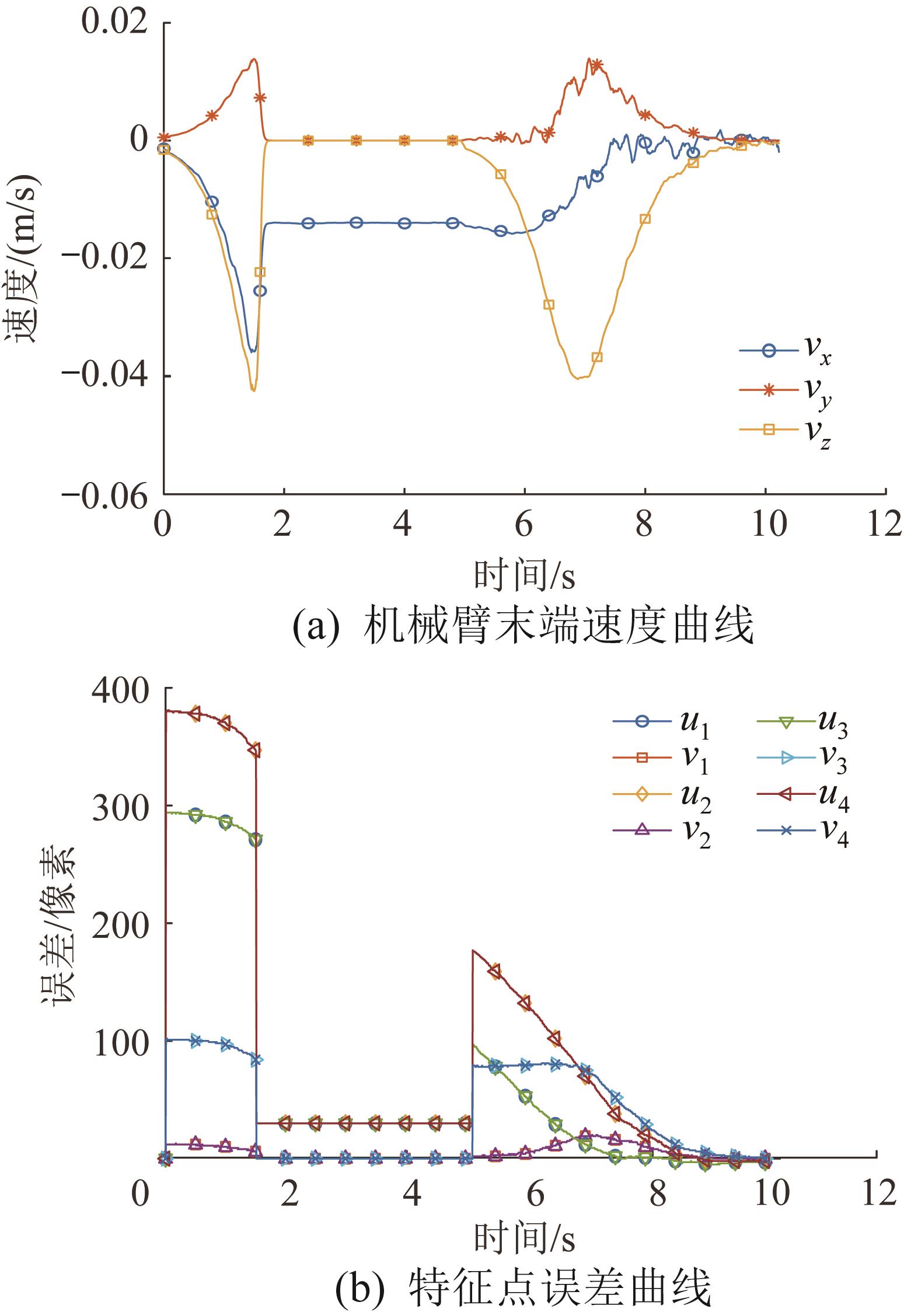
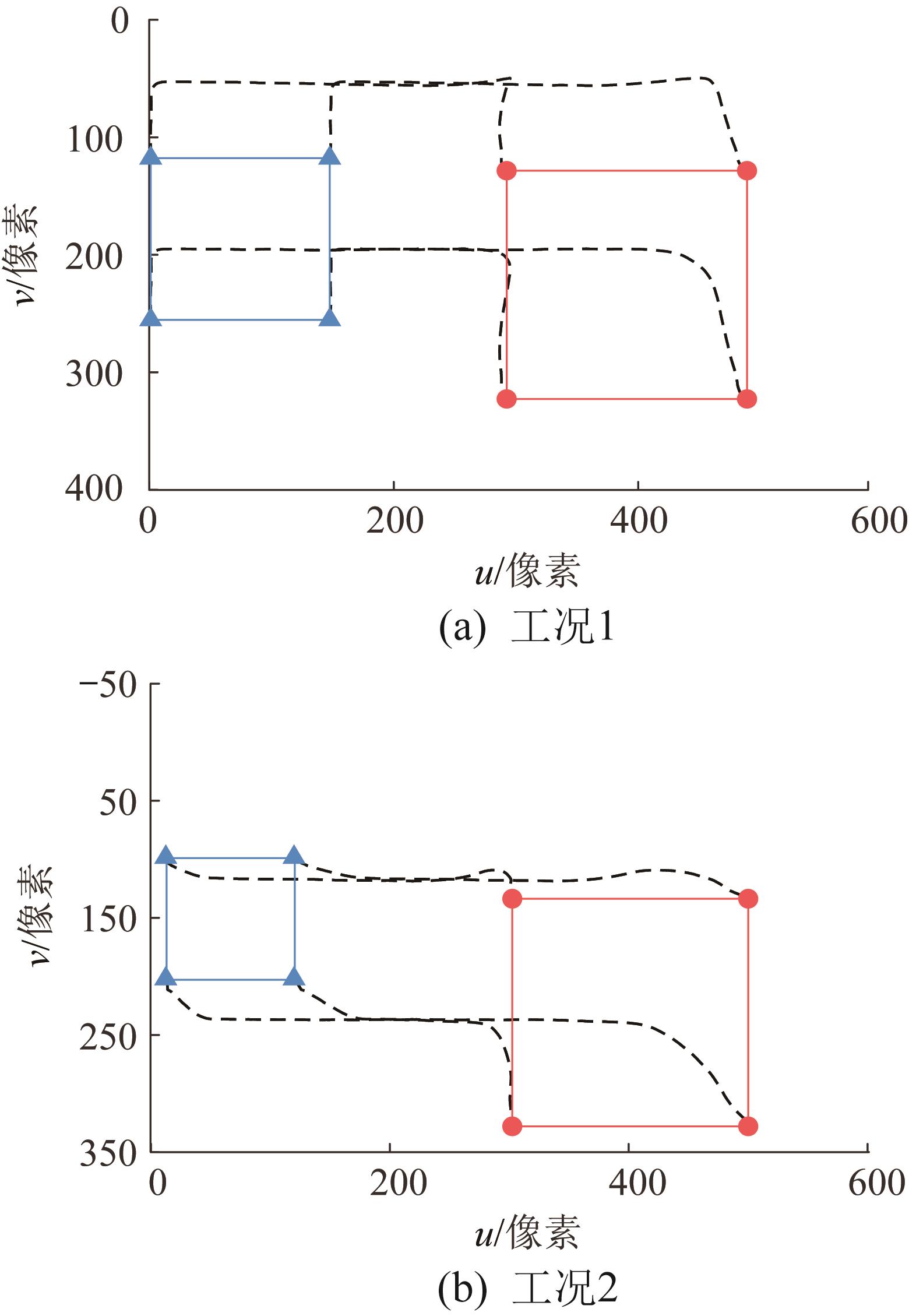
在高精度装配任务中,机械臂需要避开静态障碍物。但现有避障方法通常会中断基于图像的视觉伺服(image-based visual servoing, IBVS)过程,影响任务的连续性,并可能引发运动振荡,从而导致定位精度下降。为解决上述问题,提出了一种基于特征点动态重映射的视觉伺服实时避障方法。该方法基于障碍物最小外接长方体的几何参数,构建包含视场约束的多目标优化模型,以求解最优避障路径;随后,将避障路径方向矢量映射至图像空间,结合实时特征点动态生成引导特征点,以驱动IBVS控制器实现避障。为提升运动平滑性,设计了基于Sigmoid函数的路径平滑过渡机制;同时,引入避障距离驱动的自适应增益函数,以动态优化系统收敛速度。最后,通过Lyapunov稳定性分析证明了闭环系统的全局稳定性。轴孔定位实验结果表明:在不同的起始位姿下,该方法均能实时生成可行的避障路径,机械臂末端运动轨迹及特征点运动轨迹平滑无突变,在全程保持IBVS过程连续不间断的前提下,实现了快速、高精度的收敛。所提出的方法实现了避障路径规划与IBVS控制的闭环融合,可为高精度装配等任务中机械臂的实时避障提供一种兼顾安全性、连续性与控制精度的解决方案。
关键词:
机械臂,
视觉伺服控制,
动态重映射,
实时避障
|
|
| [[1]] |
陈雨, 张晋轩. 曲线拟合的机械臂避障轨迹规划及仿真分析[J]. 组合机床与自动化加工技术, 2021(9): 162-164.
CHEN Y, ZHANG J X. Trajectory planning and simulation analysis of robot arm obstacle avoidance based on curve fitting[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(9): 162-164.
|
|
|
| [[2]] |
柴天佑. 工业过程控制系统研究现状与发展方向[J]. 中国科学: 信息科学, 2016, 46(8): 1003-1015. doi:10.1360/n112016-00062
CHAI T Y. Industrial process control systems: research status and development direction[J]. Scientia Sinica (Informationis), 2016, 46(8): 1003-1015.
doi: 10.1360/n112016-00062
|
|
|
| [[3]] |
王耀南, 江一鸣, 姜娇, 等. 机器人感知与控制关键技术及其智能制造应用[J]. 自动化学报, 2023, 49(3): 494-513.
WANG Y N, JIANG Y M, JIANG J, et al. Key technologies of robot perception and control and its intelligent manufacturing applications[J]. Acta Automatica Sinica, 2023, 49(3): 494-513.
|
|
|
| [[4]] |
李玲, 侯玉龙, 李瑶, 等. 基于改进麻雀搜索算法的机械臂多目标轨迹优化方法[J]. 工程设计学报, 2025, 32(5): 664-674.
LI L, HOU Y L, LI Y, et al. Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm[J]. Chinese Journal of Engineering Design, 2025, 32(5): 664-674.
|
|
|
| [[5]] |
袁庆霓, 齐建友, 虞宏建. 基于深度强化学习的机械臂视觉伺服智能控制[J]. 计算机集成制造系统, 2025, 31(3): 998-1013.
YUAN Q N, QI J Y, YU H J. Visual servo intelligent control method for robot arms based on deep reinforcement learning[J]. Computer Integrated Manufacturing Systems, 2025, 31(3): 998-1013.
|
|
|
| [[6]] |
HUTCHINSON S, HAGER G D, CORKE P I. A tutorial on visual servo control[J]. IEEE Transactions on Robotics and Automation, 1996, 12(5): 651-670.
|
|
|
| [[7]] |
焦建军, 李宗刚, 李龙雄, 等. 无标定视觉伺服多轴孔装配定位方法研究[J]. 中南大学学报(自然科学版), 2024, 55(10): 3731-3741.
JIAO J J, LI Z G, LI L X, et al. Research on positioning method of uncalibrated visual servo multiple peg-in-hole assembly[J]. Journal of Central South University (Science and Technology), 2024, 55(10): 3731-3741.
|
|
|
| [[8]] |
牟雪琪, 于海生, 张鹏鑫, 等. 基于灰狼优化的机器人视觉伺服协同控制[J]. 组合机床与自动化加工技术, 2025(2): 120-125, 130.
MOU X Q, YU H S, ZHANG P X, et al. Robotic visual servo cooperative control based on grey wolf optimizer[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2025(2): 120-125, 130.
|
|
|
| [[9]] |
冯垚, 周志峰, 沈亦纯, 等. 基于改进RRT算法的避障路径规划[J]. 工程设计学报, 2023, 30(6): 707-716.
FENG Y, ZHOU Z F, SHEN Y C, et al. Obstacle avoidance path planning based on improved RRT algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 707-716.
|
|
|
| [[10]] |
李宸, 史春景, 李金泉. 复合机器人路径规划研究[J]. 工程设计学报, 2025, 32(5): 623-633.
LI C, SHI C J, LI J Q. Research on path planning for composite robot[J]. Chinese Journal of Engineering Design, 2025, 32(5): 623-633.
|
|
|
| [[11]] |
LAVALLE S M. Rapidly-exploring random trees: a new tool for path planning[R]. Ames, Iowa: Iowa State University, 1998.
|
|
|
| [[12]] |
GARCÍA E, VILLAR J R, TAN Q, et al. An efficient multi-robot path planning solution using A* and coevolutionary algorithms[J]. Integrated Computer-Aided Engineering, 2023, 30(1): 41-52.
|
|
|
| [[13]] |
KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research, 1986, 5(1): 90-98.
|
|
|
| [[14]] |
赵红专, 张鑫, 张蓓聆, 等. 基于改进人工势场的智能车动态安全椭圆路径规划方法[J]. 山东大学学报(工学版), 2025, 55(3): 46-57.
ZHAO H Z, ZHANG X, ZHANG B L, et al. A dynamic safe elliptical path planning method for intelligent vehicles based on improved artificial potential field[J]. Journal of Shandong University (Engineering Science), 2025, 55(3): 46-57.
|
|
|
| [[15]] |
ZHAI D H, XIA Z Q, WU H C, et al. A motion planning method for robots based on DMPs and modified obstacle-avoiding algorithm[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(4): 2678-2688.
|
|
|
| [[16]] |
刘暾东, 林晨滢, 吴晓敏. 基于人工势场法的机械臂动态运动基元局部平滑避障方法[J/OL]. 控制理论与应用,2025: 1-9. (2025-03-12) [2025-06-24]. .
LIU D D, LIN C Y, WU X M. Local smooth obstacle avoidance method for dynamic motion primitives of manipulators based on artificial potential field[J/OL]. Control Theory & Applications, 2025: 1-9. (2025-03-12) [2025-06-24]. .
|
|
|
| [[17]] |
FLANDIN G, CHAUMETTE F, MARCHAND E. Eye-in-hand/eye-to-hand cooperation for visual servoing[C]//Proceedings of the 2000 IEEE International Conference on Robotics and Automation. San Francisco, CA, Apr. 24-28, 2002.
|
|
|
| [[18]] |
BÍRÓ P, KOVÁCS B B H, NOVÁK T, et al. Cluster parameter-based DBSCAN maps for image characterization[J]. Computational and Structural Biotechnology Journal, 2025, 27: 920-927.
|
|
|
| [[19]] |
纳文, 张世强, 曹越琦, 等. 雅可比矩阵在机器人运动中的应用[J]. 北京理工大学学报, 2020, 40(5): 576-580.
AUNG N W, ZHANG S Q, CAO Y Q, et al. Applications of Jacobi matrices in kinematics of robots[J]. Transactions of Beijing Institute of Technology, 2020, 40(5): 576-580.
|
|
|
| [[20]] |
SOHAN M, SAI RAM T, RAMI REDDY C V. A review on YOLOv8 and its advancements[C]//Data Intelligence and Cognitive Informatics. Singapore: Springer, 2024: 529-545.
|
|
|
| [[21]] |
刘远贺, 黎克波, 朱云冲, 等. 基于误差动力学的全局非线性精确飞行时间控制制导律设计[J]. 中国科学: 技术科学, 2023, 53(4): 565-575. doi:10.1360/sst-2022-0072
LIU Y H, LI K B, ZHU Y C, et al. Global nonlinear exact impact time control guidance design based on error dynamics[J]. Scientia Sinica (Technologica), 2023, 53(4): 565-575.
doi: 10.1360/sst-2022-0072
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|