| Theory and Method of Mechanical Design |
|


|
|
|
| Collision detection method for yarn cylinder loading robotic arm based on hierarchical bounding box |
Chenhui JI1( ),Danfeng SHEN1(),Gang ZHAO2,Haitao SUN1 ),Danfeng SHEN1(),Gang ZHAO2,Haitao SUN1 |
1.School of Mechanical and Electrical Engineering, Xi'an Polytechnic University, Xi'an 710048, China
2.Shaanxi Changling Textile Mechanical & Electronic Technological Co. , Ltd. , Baoji 721013, China |
|
|
|
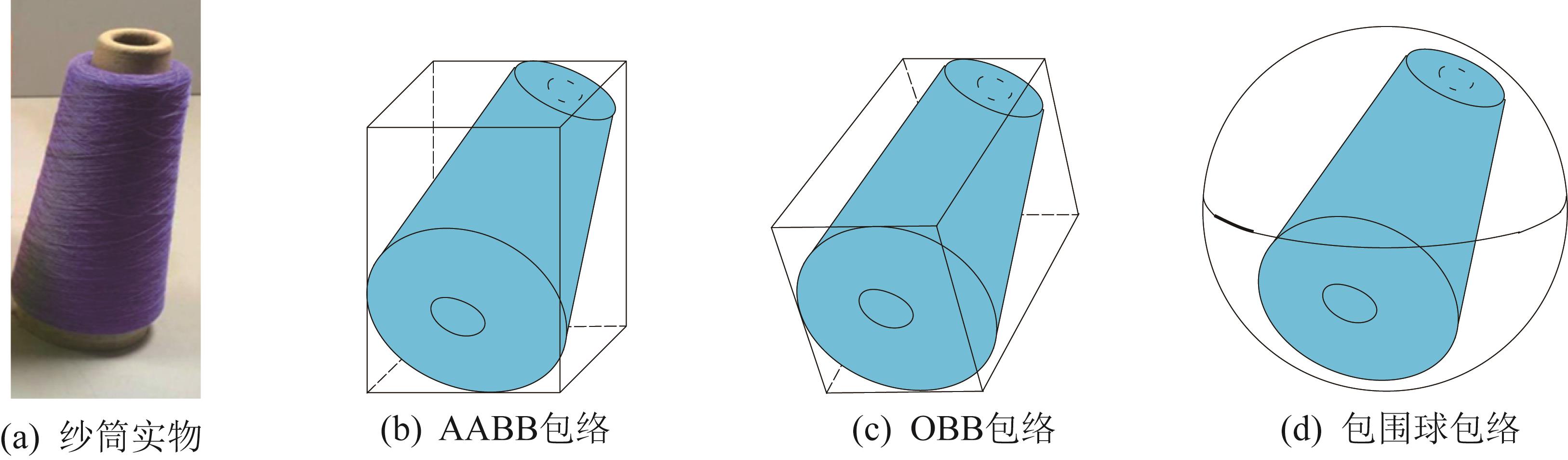
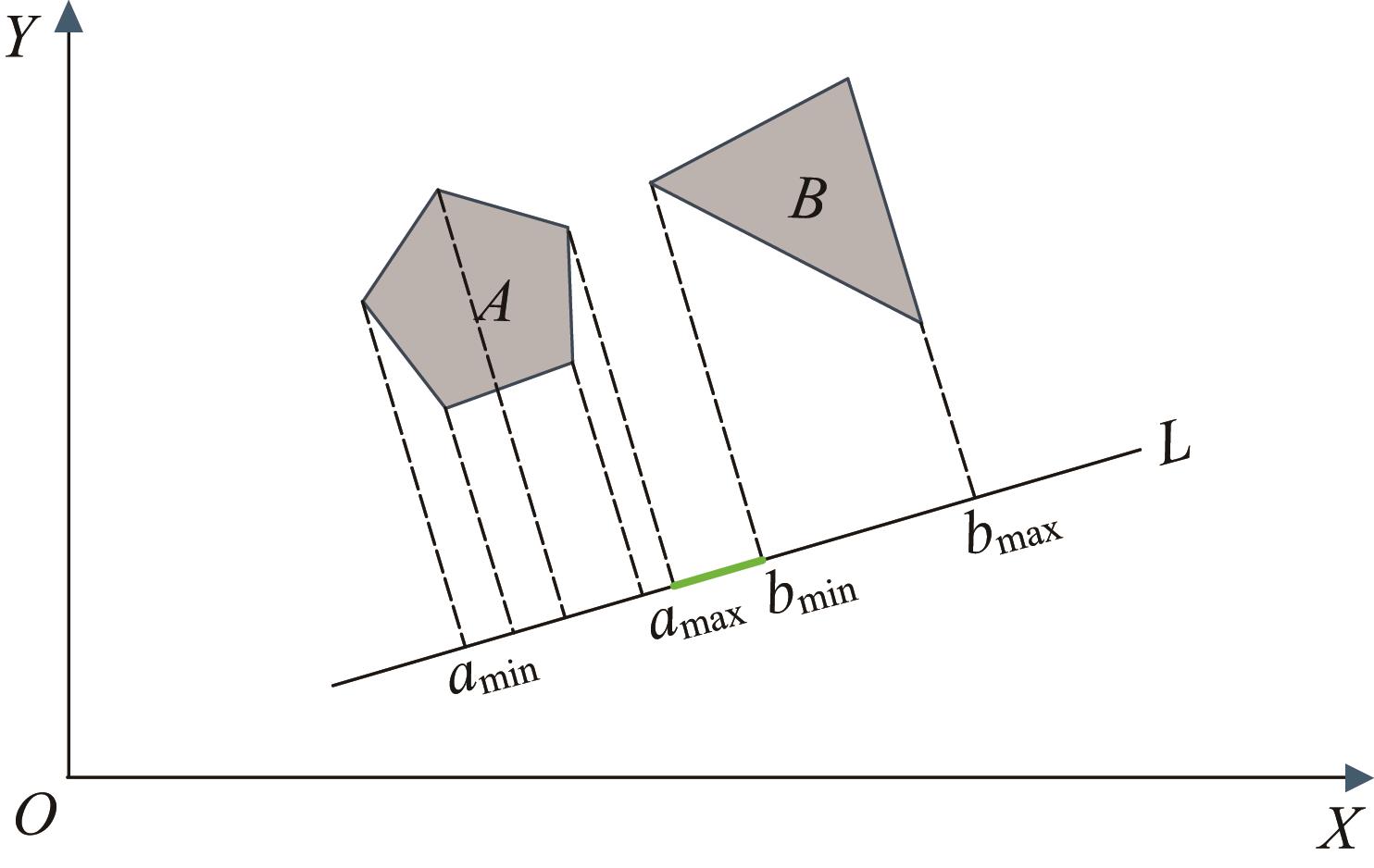
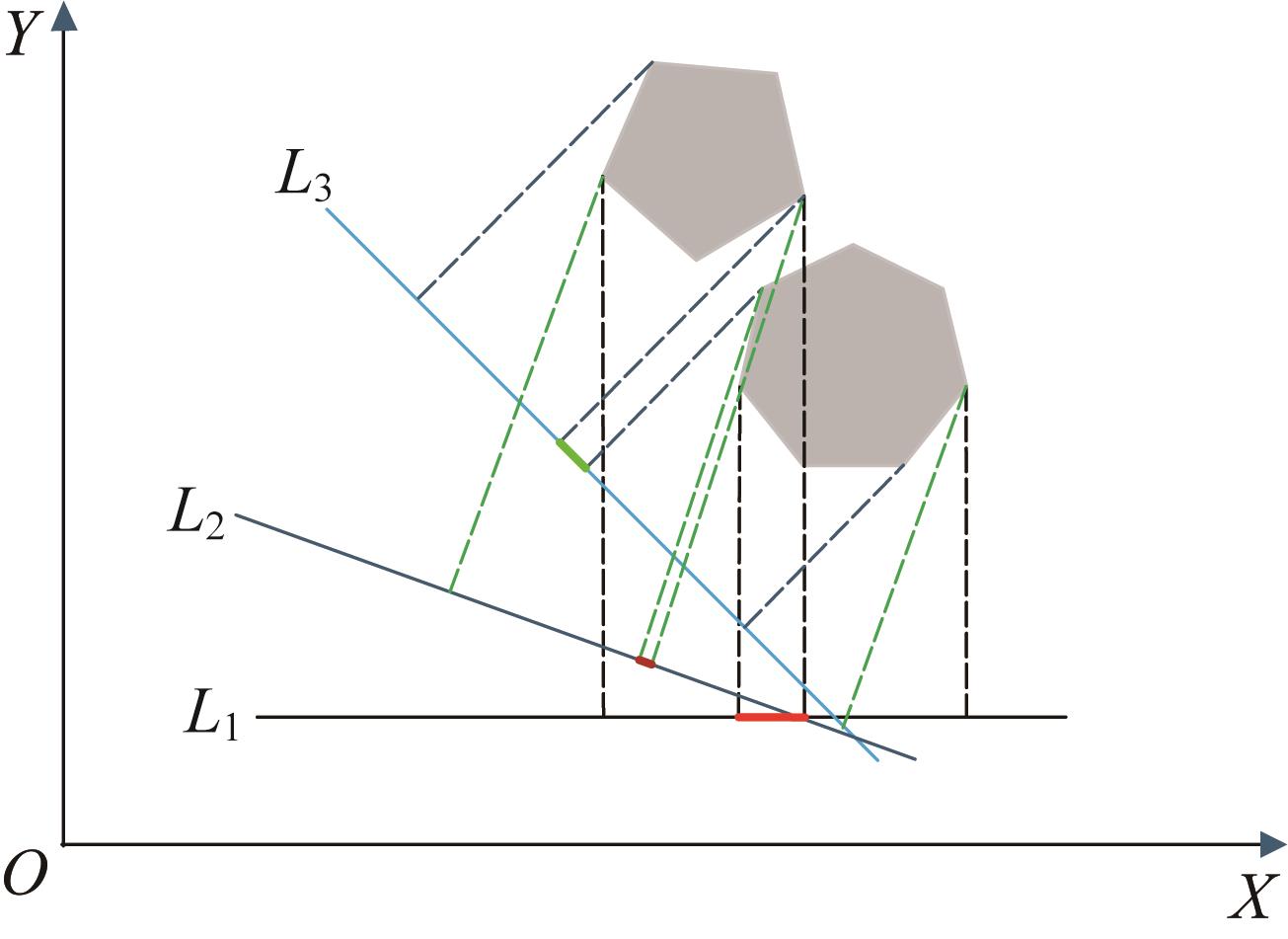
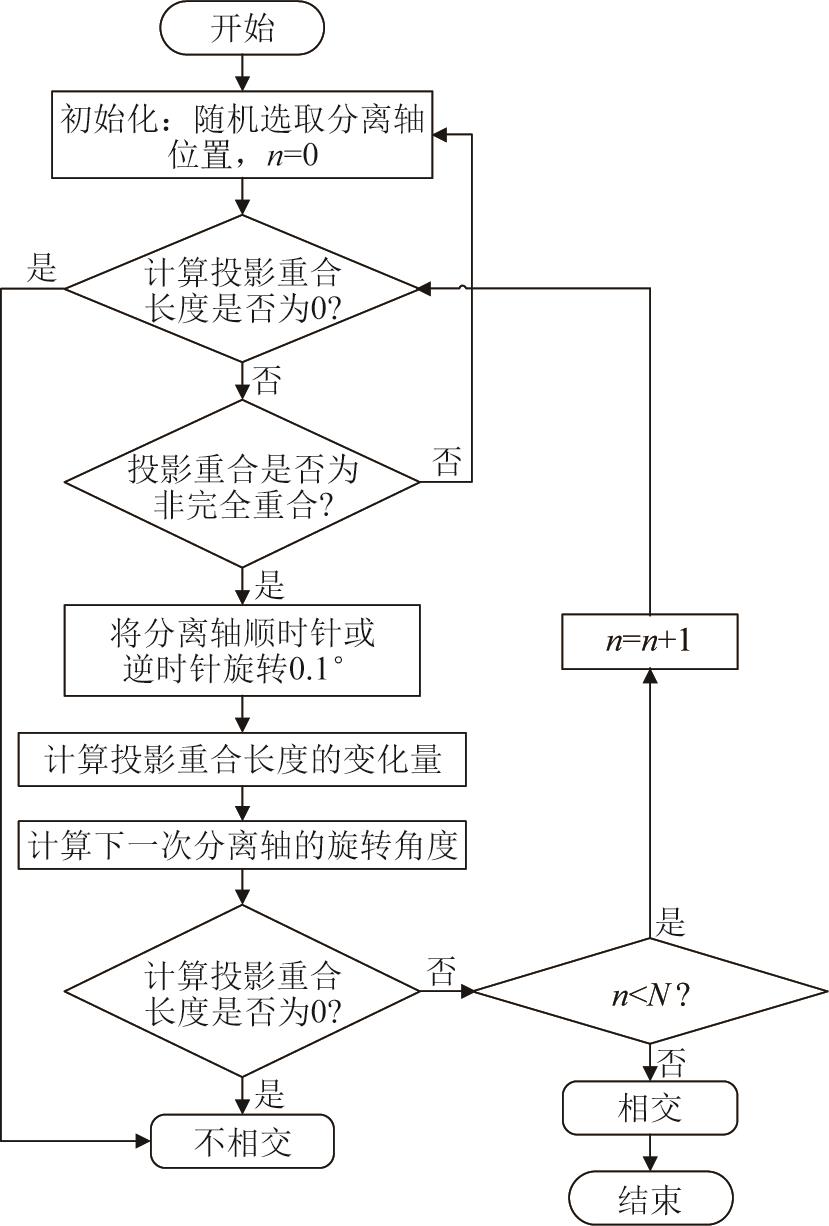
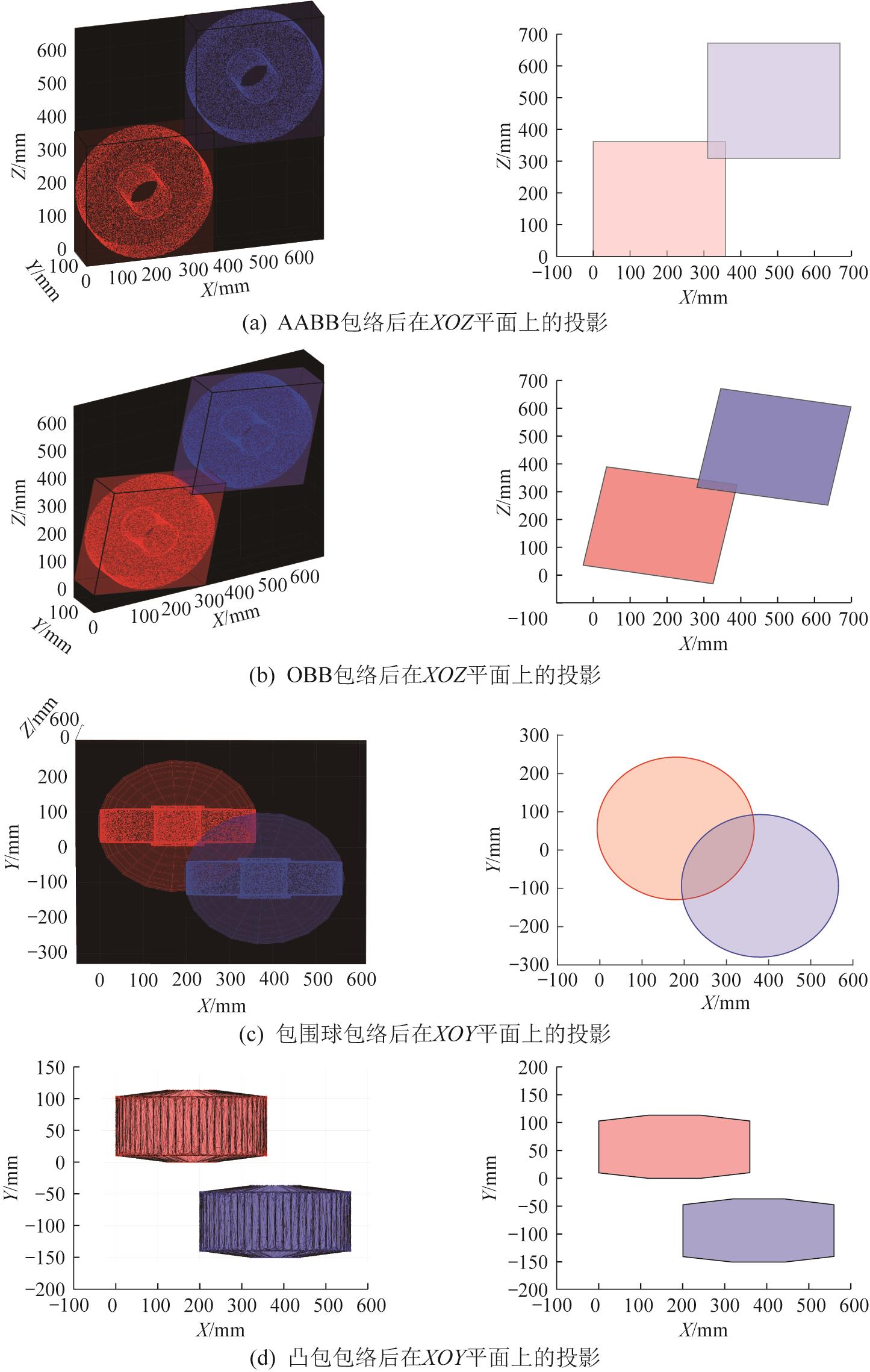
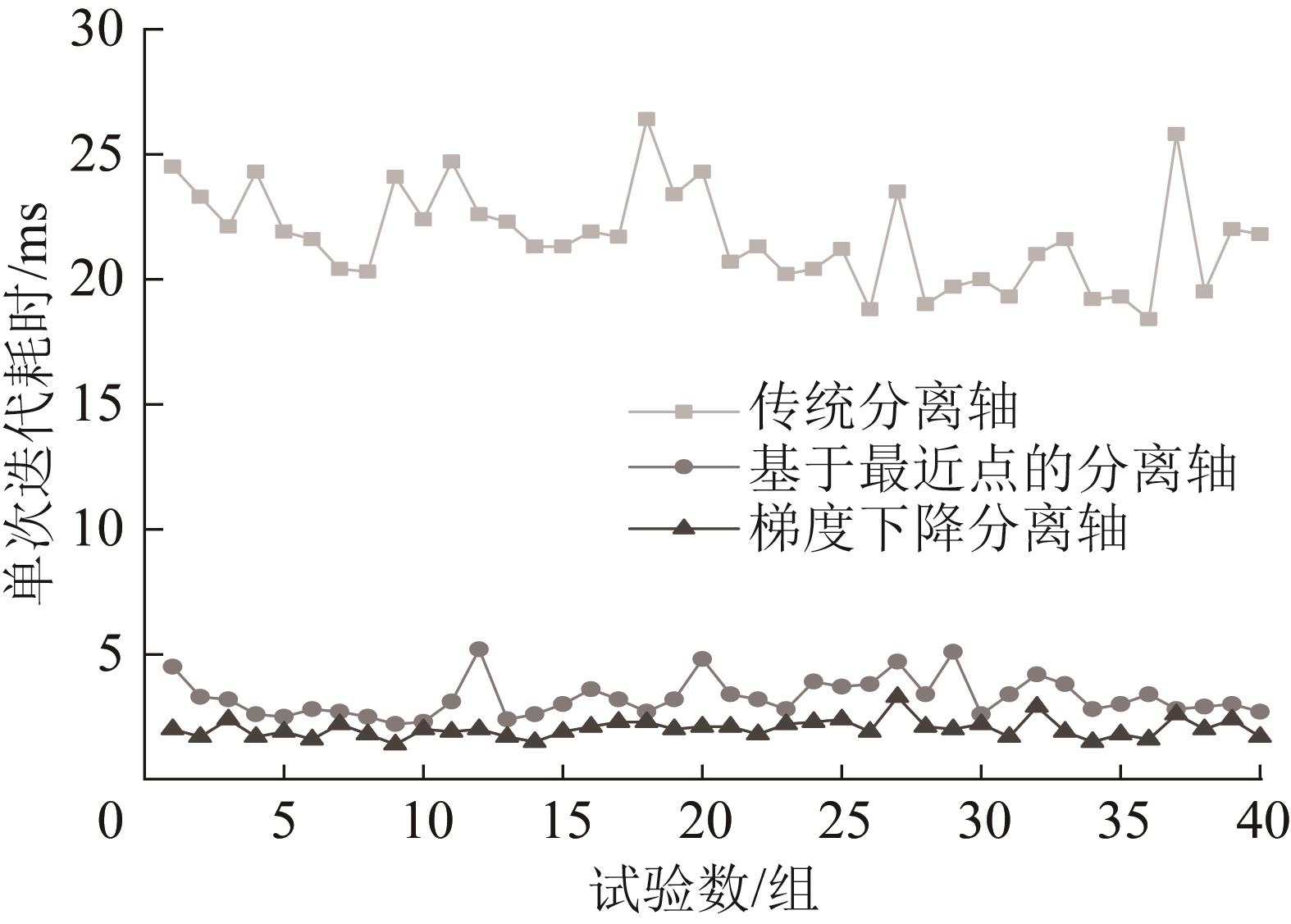
Abstract Aiming at the problem that traditional yarn cylinder loading operation depends on manual operation, the industry is committed to achieving automatic grasping by robotic arms. To this end, the focus is on two key links of object enveloping and collision detection in automatic grasping of robotic arms. In order to solve the problem of insufficient envelope accuracy of the traditional hybrid hierarchical bounding box algorithm in complex scenarios, an improved hybrid hierarchical bounding box model based on convex hull structure was designed, which significantly improved the spatial fitness of the bounding box by constructing the convex hull constraints in the leaf nodes. Aiming at the problem of low computational inefficiency of the classical separating axis theorem in dealing with collision detection of complex convex polygons, a gradient descent-based separating axis optimization strategy was proposed. By establishing the functional relationship between projection length variations and separating axis rotation angle, the search direction and rotation step of separating axes were dynamically adjusted. Experimental results showed that compared with the traditional hybrid hierarchical bounding box model, the improved hybrid hierarchical bounding box model had obvious improvement in the envelope accuracy. Compared with the classical separating axis algorithm, the gradient descent separating axis algorithm reduced the average iteration time and the iteration count by 90.67% and 98.48%, respectively. The proposed method is suitable for complex working conditions in industrial scenarios where objects are densely arranged and require high-precision collision detection.
|
|
Received: 07 May 2025
Published: 30 December 2025
|
|
|
|
Corresponding Authors:
Danfeng SHEN
E-mail: 3025145105@qq.com;dfshen@xpu.edu.cn
|
基于层次包围盒的纱筒装取机械臂碰撞检测方法
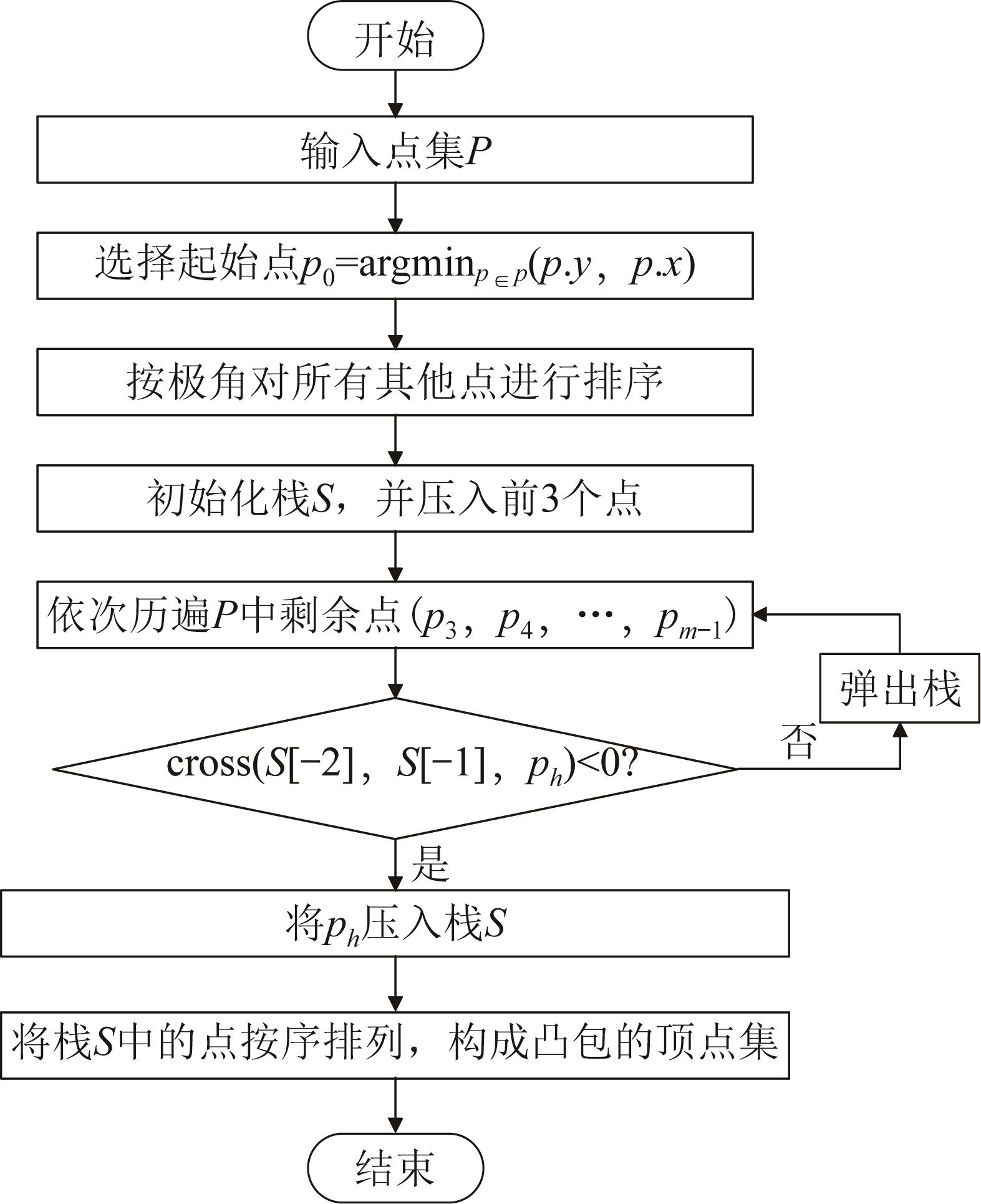
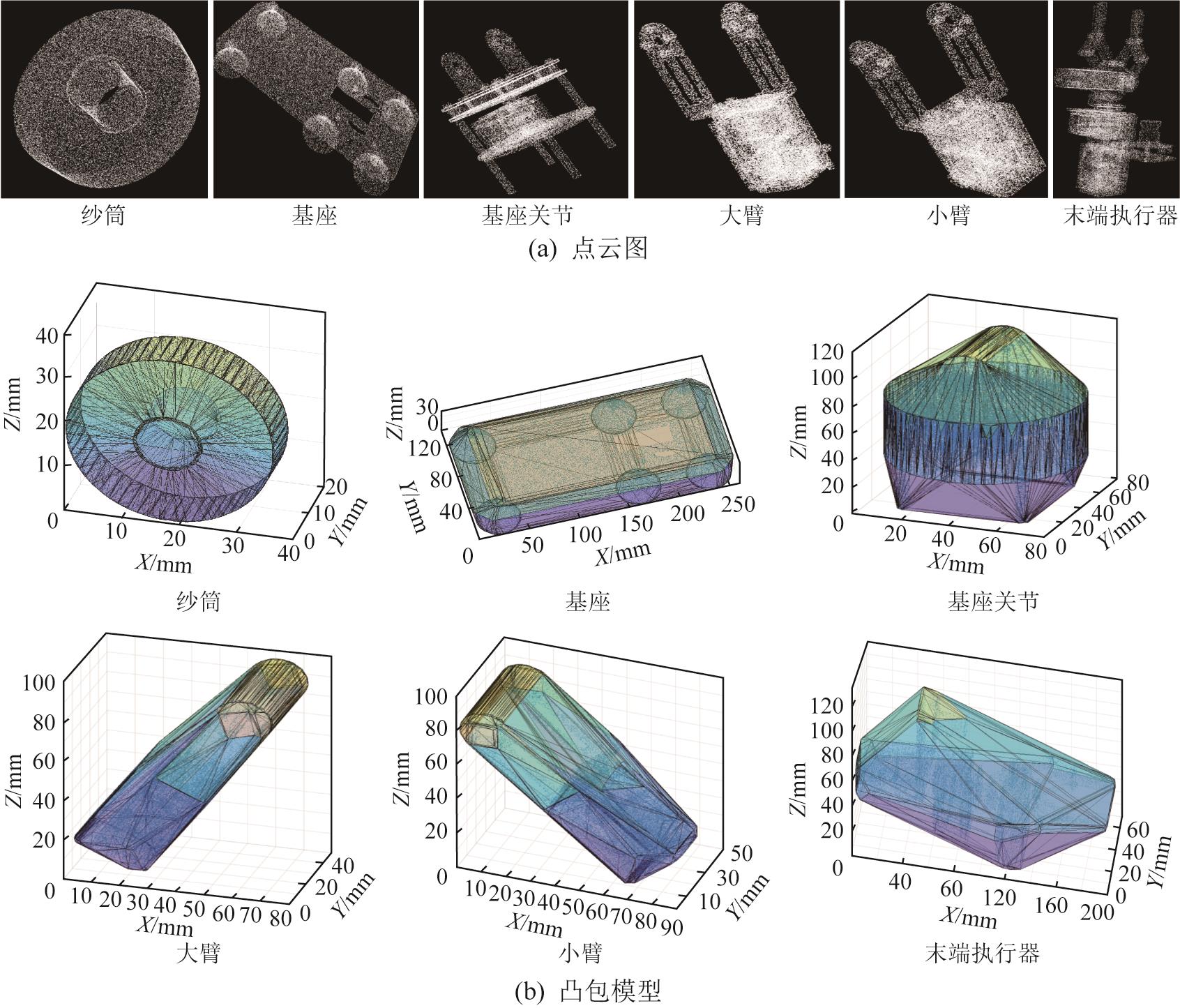
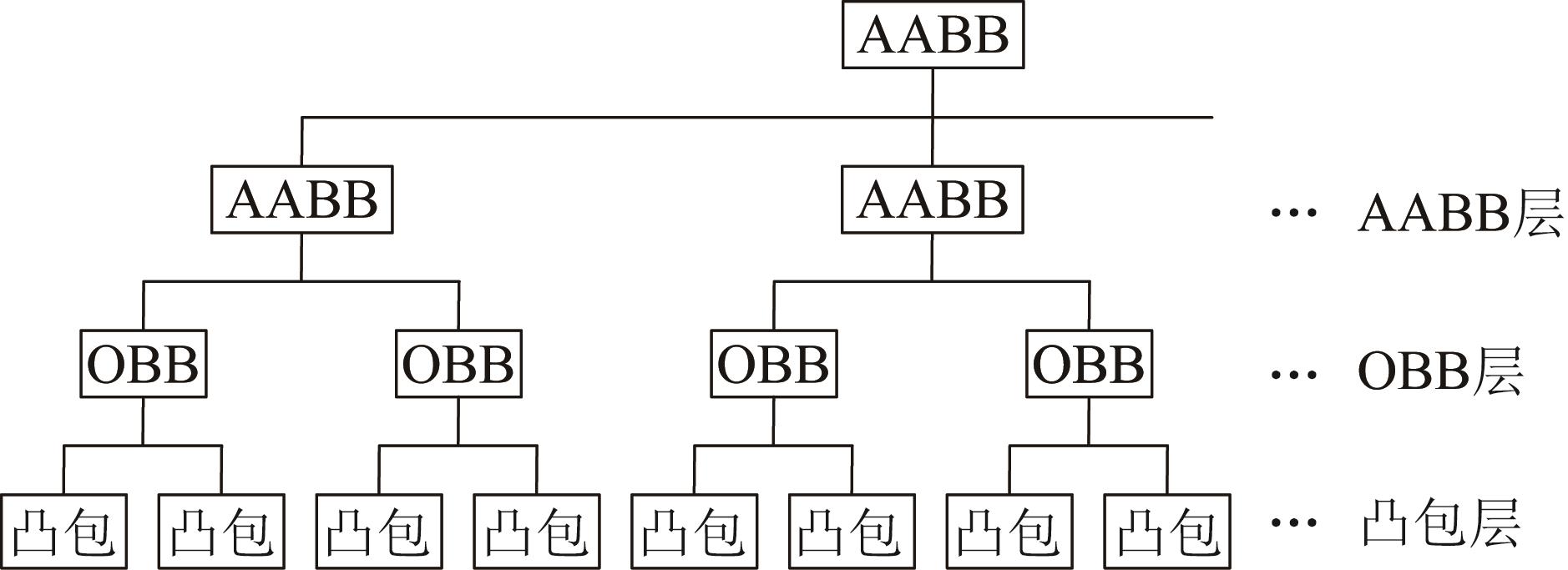
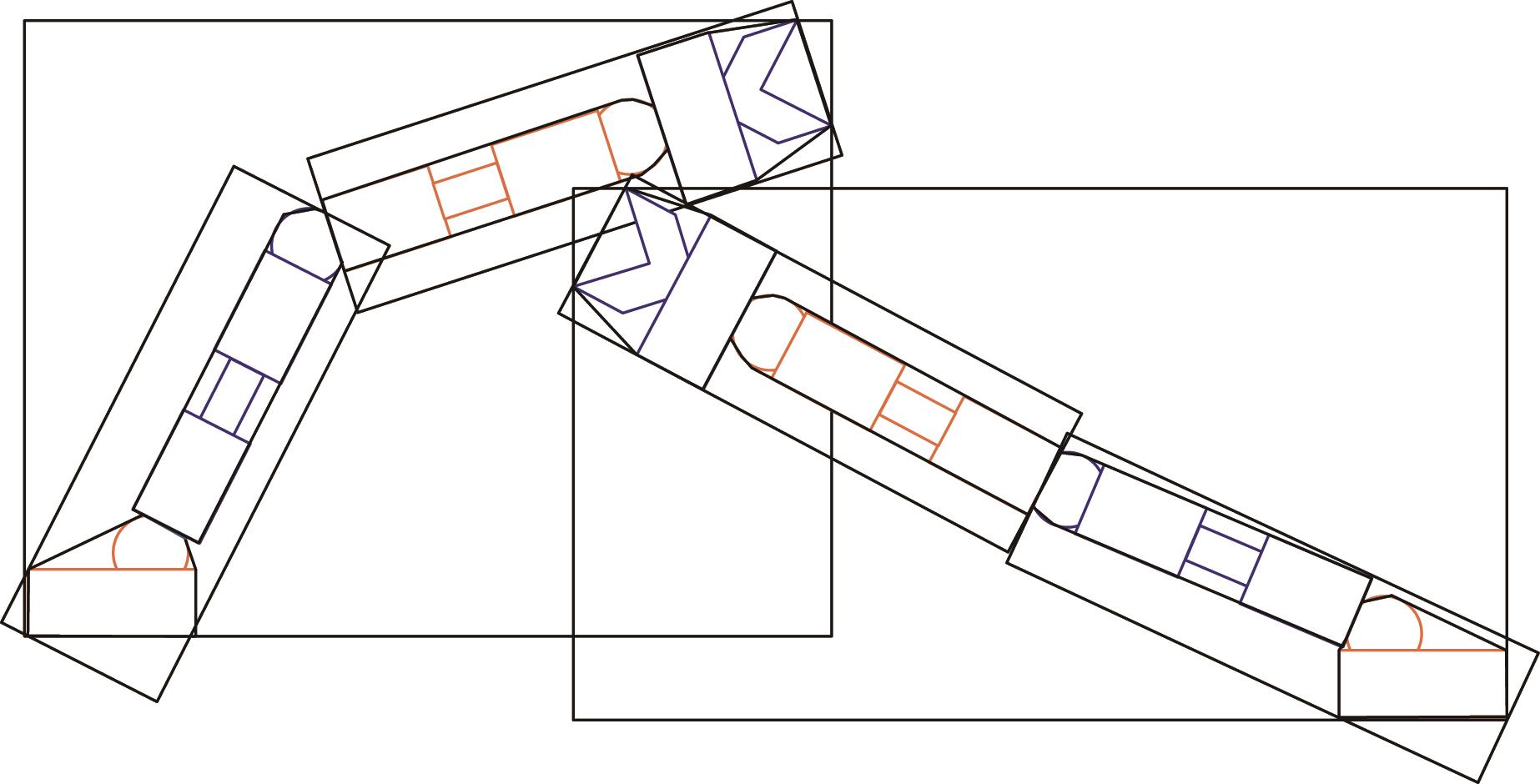
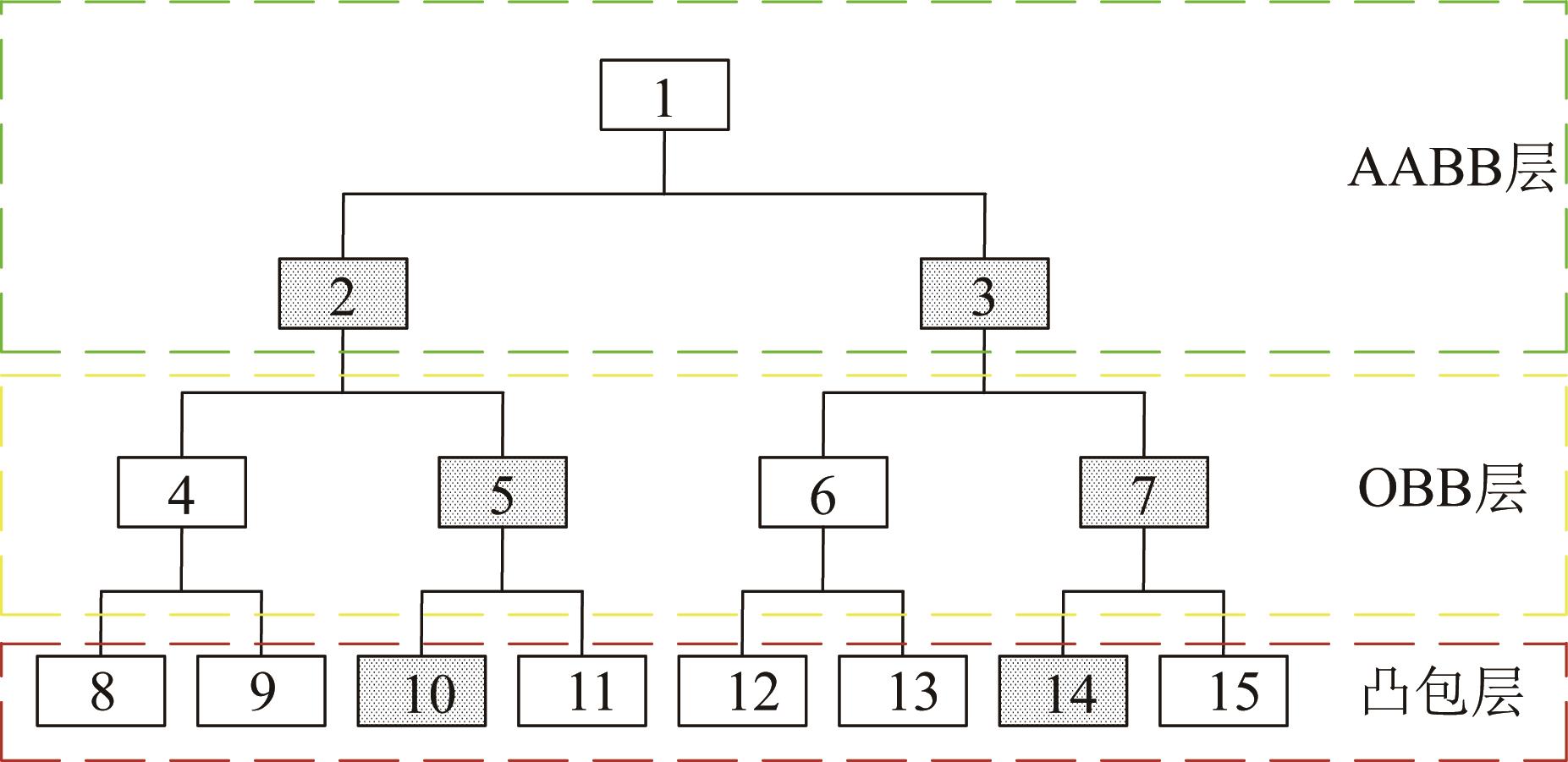
针对传统纱筒装取作业依赖人工操作的问题,业界致力于实现机械臂自动化抓取。为此,聚焦于机械臂自动化抓取中的物体包络和碰撞检测两个关键环节进行研究。为解决传统混合层次包围盒算法在复杂场景下包络精度不足的问题,设计了一种基于凸包(convex hull)结构的改进混合层次包围盒模型,通过在叶节点处构建凸包约束,显著提升了包围盒的空间贴合度。针对传统分离轴定理在处理复杂凸多边形碰撞检测时计算效率低下的问题,提出了基于梯度下降的分离轴优化策略,通过建立投影长度变化量与分离轴旋转角度的函数关系,动态调整分离轴的搜索方向与旋转步长。实验结果表明:相较于传统混合层次包围盒模型,改进后的混合层次包围盒模型在包络精度上明显改善;梯度下降分离轴算法在平均迭代耗时与迭代次数方面较传统分离轴算法分别降低了90.67%和98.48%。所提出的方法适用于工业场景中物体排布密集且需要高精度碰撞检测的复杂工况。
关键词:
层次包围盒,
凸包,
纱筒装取,
机械臂,
分离轴定理,
碰撞检测
|
|
| [[15]] |
XIE H, SU F Z, YIN J N, et al. Network modeling and refined management of UAV flight conflicts in complex low altitude airspace[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 328226.
|
|
|
| [[16]] |
江亦涵, 王挺, 李亚伟, 等. 双七自由度臂防碰撞协同控制算法研究[J]. 高技术通讯, 2023, 33(7): 750-761.
JIANG Y H, WANG T, LI Y W, et al. Research on the control system of cooperative work of double seven degrees of freedom arm robot[J]. Chinese High Technology Letters, 2023, 33(7): 750-761.
|
|
|
| [[17]] |
张然, 杨子辉, 孙国民, 等. 用于连续碰撞检测的线性动态分离轴算法[J]. 计算机辅助设计与图形学学报, 2024, 36(10): 1647-1652. doi:10.3724/sp.j.1089.2024.20070
ZHANG R, YANG Z H, SUN G M, et al. Linear dynamic separating axis algorithm for continuous collision detection[J]. Journal of Computer-Aided Design & Computer Graphics, 2024, 36(10): 1647-1652.
doi: 10.3724/sp.j.1089.2024.20070
|
|
|
| [[18]] |
吴寿英, 李炜. 基于分离轴算法的机场场面飞行器冲突告警研究[J]. 计算机应用与软件, 2023, 40(3): 72-76, 156.
WU S Y, LI W. Research on aircraft collision warning at airport scene based on separation axis algorithm[J]. Computer Applications and Software, 2023, 40(3): 72-76, 156.
|
|
|
| [[19]] |
FLORES-CABALLERO G, RODRÍGUEZ-MOLINA A, ALDAPE-PÉREZ M, et al. Optimized path-planning in continuous spaces for unmanned aerial vehicles using meta-heuristics[J]. IEEE Access, 2020, 8: 176774-176788.
|
|
|
| [[20]] |
MONTAUT L, LE LIDEC Q, PETRIK V, et al. GJK++: leveraging acceleration methods for faster collision detection[J]. IEEE Transactions on Robotics, 2024, 40: 2564-2581.
|
|
|
| [[21]] |
NESTEROV Y. Lectures on convex optimization[M]. 2nd ed. Cham: Springer, 2018.
|
|
|
| [[1]] |
许高平, 孙以泽. 移动机械臂牵引卷装纱线的动态建模与控制[J]. 纺织学报, 2024, 45(1): 1-11.
XU G P, SUN Y Z. Dynamic modeling and control of package yarn pulled by mobile manipulator[J]. Journal of Textile Research, 2024, 45(1): 1-11.
|
|
|
| [[22]] |
YANDUN F, PARHAR T, SILWAL A, et al. Reaching pruning locations in a vine using a deep reinforcement learning policy[C]//2021 IEEE International Conference on Robotics and Automation. Xi'an, May 30-Jun. 5, 2021.
|
|
|
| [[2]] |
毛慧敏, 屠佳佳, 孙磊, 等. 适应多类型纱筒的换筒末端执行器关键技术[J]. 纺织学报, 2024, 45(6): 193-200.
MAO H M, TU J J, SUN L, et al. Key technology research of bobbin change actuator suitable for multiple bobbin types[J]. Journal of Textile Research, 2024, 45(6): 193-200.
|
|
|
| [[3]] |
ZAND M, ETEMAD A, GREENSPAN M. Oriented bounding boxes for small and freely rotated objects[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 4701715.
|
|
|
| [[4]] |
VITSAS N, EVANGELOU I, PAPAIOANNOU G, et al. Parallel transformation of bounding volume hierarchies into oriented bounding box trees[J]. Computer Graphics Forum, 2023, 42(2): 245-254.
|
|
|
| [[5]] |
LUBBE R, XU W J, WILKE D N, et al. Analysis of parallel spatial partitioning algorithms for GPU based DEM[J]. Computers and Geotechnics, 2020, 125: 103708.
|
|
|
| [[6]] |
ALSHAMRANI R, ALSHEHRI F, KURDI H. A preprocessing technique for fast convex hull computation[J]. Procedia Computer Science, 2020, 170: 317-324.
|
|
|
| [[7]] |
张宇, 张得礼, 张文奇, 等. 基于混合层次包围盒的水下训练机械臂碰撞检测方法研究[J]. 载人航天, 2022, 28(5): 627-636.
ZHANG Y, ZHANG D L, ZHANG W Q, et al. Research on collision detection method of underwater training manipulator based on hybrid hierarchical bounding box[J]. Manned Spaceflight, 2022, 28(5): 627-636.
|
|
|
| [[8]] |
靳雁霞, 乔星宇, 张翎, 等. 布料与刚体模型间的空间网格碰撞检测方法[J]. 中国图象图形学报, 2024, 29(10): 3144-3156. doi:10.11834/jig.230543
JIN Y X, QIAO X Y, ZHANG L, et al. Collision detection method between fabric and complex models in a space mesh[J]. Journal of Image and Graphics, 2024, 29(10): 3144-3156.
doi: 10.11834/jig.230543
|
|
|
| [[9]] |
唐源皓, 侯进, 吴婷婷, 等. 基于质点转换和包围盒的混合碰撞检测算法[J]. 哈尔滨工程大学学报, 2018, 39(10): 1695-1701.
TANG Y H, HOU J, WU T T, et al. Hybrid collision detection algorithm based on particle conversion and bounding box[J]. Journal of Harbin Engineering University, 2018, 39(10): 1695-1701.
|
|
|
| [[10]] |
SAFEEA M, MENDES N, NETO P. Minimum distance calculation for safe human robot interaction[J]. Procedia Manufacturing, 2017, 11: 99-106.
|
|
|
| [[11]] |
朱博承, 王志军, 李占贤. 碰撞检测及其在机器人领域中的应用研究综述[J]. 机床与液压, 2023, 51(16): 201-210.
ZHU B C, WANG Z J, LI Z X. A review of collision detection and its application in robotics[J]. Machine Tool & Hydraulics, 2023, 51(16): 201-210.
|
|
|
| [[12]] |
XIONG Y, GE Y Y, GRIMSTAD L, et al. An autonomous strawberry-harvesting robot: design, development, integration, and field evaluation[J]. Journal of Field Robotics, 2020, 37(2): 202-224.
|
|
|
| [[13]] |
SCHÜTZ M, OHRHALLINGER S, WIMMER M. Fast out-of-core octree generation for massive point clouds[J]. Computer Graphics Forum, 2020, 39(7): 155-167.
|
|
|
| [[14]] |
ÅBLAD E, SPENSIERI D, BOHLIN R, et al. Continuous collision detection of pairs of robot motions under velocity uncertainty[J]. IEEE Transactions on Robotics, 2021, 37(5): 1780-1791.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|