| Robotic and Mechanism Design |
|

|
|
|
| Design and performance analysis of pneumatic wall-climbing robot based on Kresling origami structure |
Kai CHU( ),Yu ZHANG,Jialiang WANG,Hao ZHOU,Shen SHU,Junfeng HU() ),Yu ZHANG,Jialiang WANG,Hao ZHOU,Shen SHU,Junfeng HU() |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
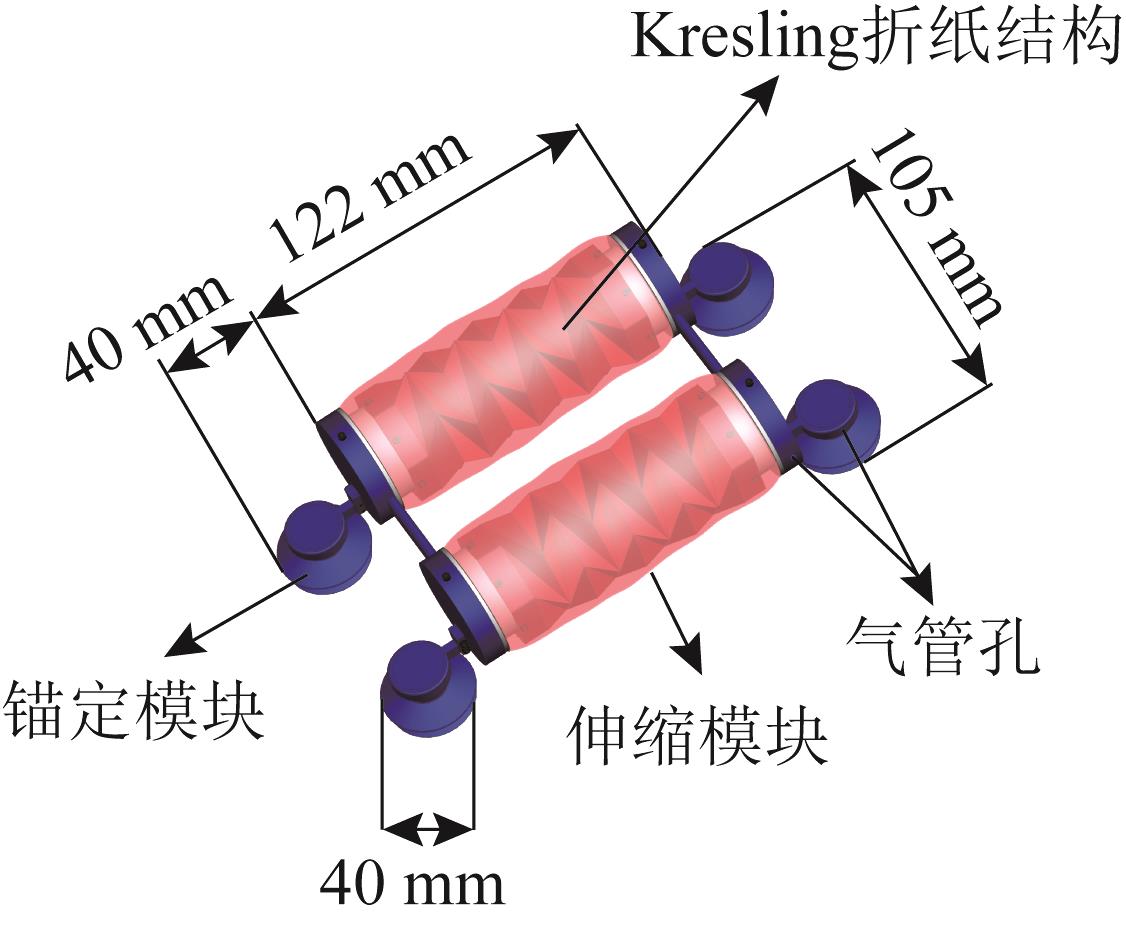
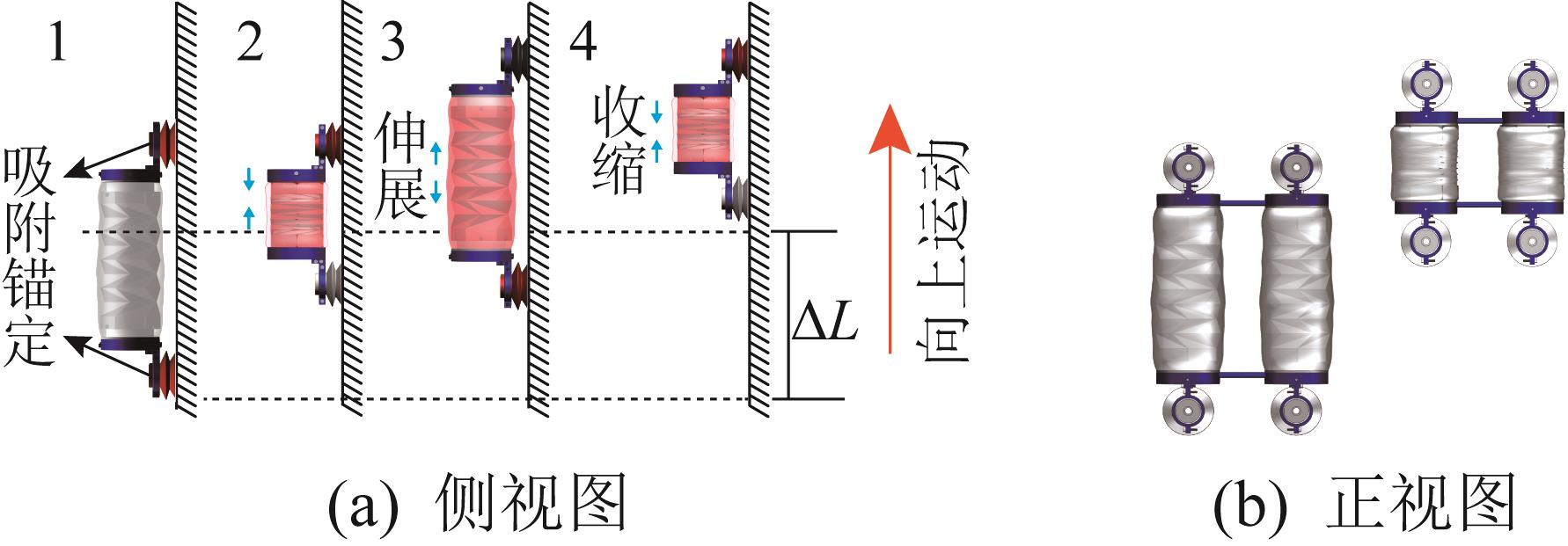
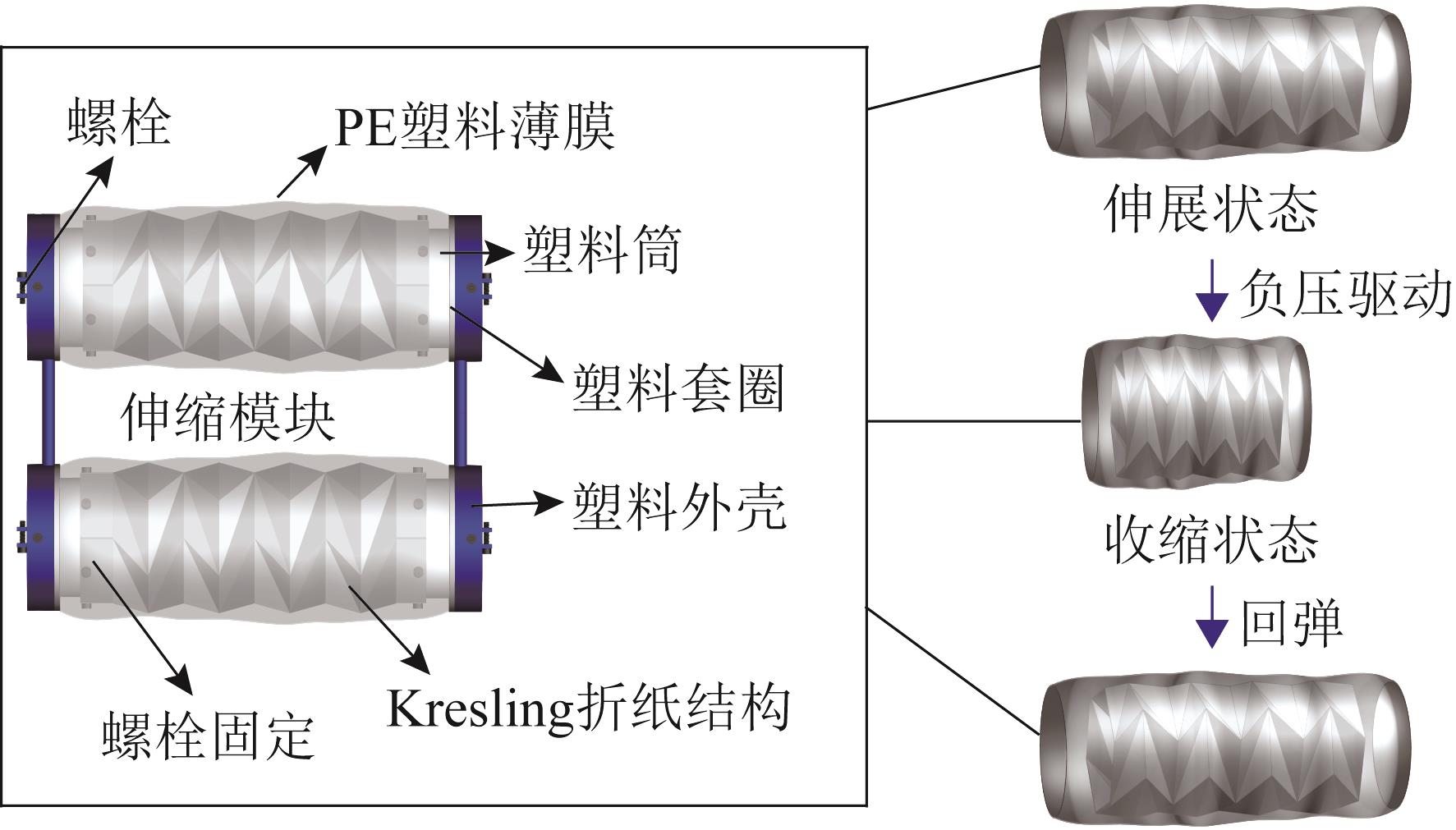
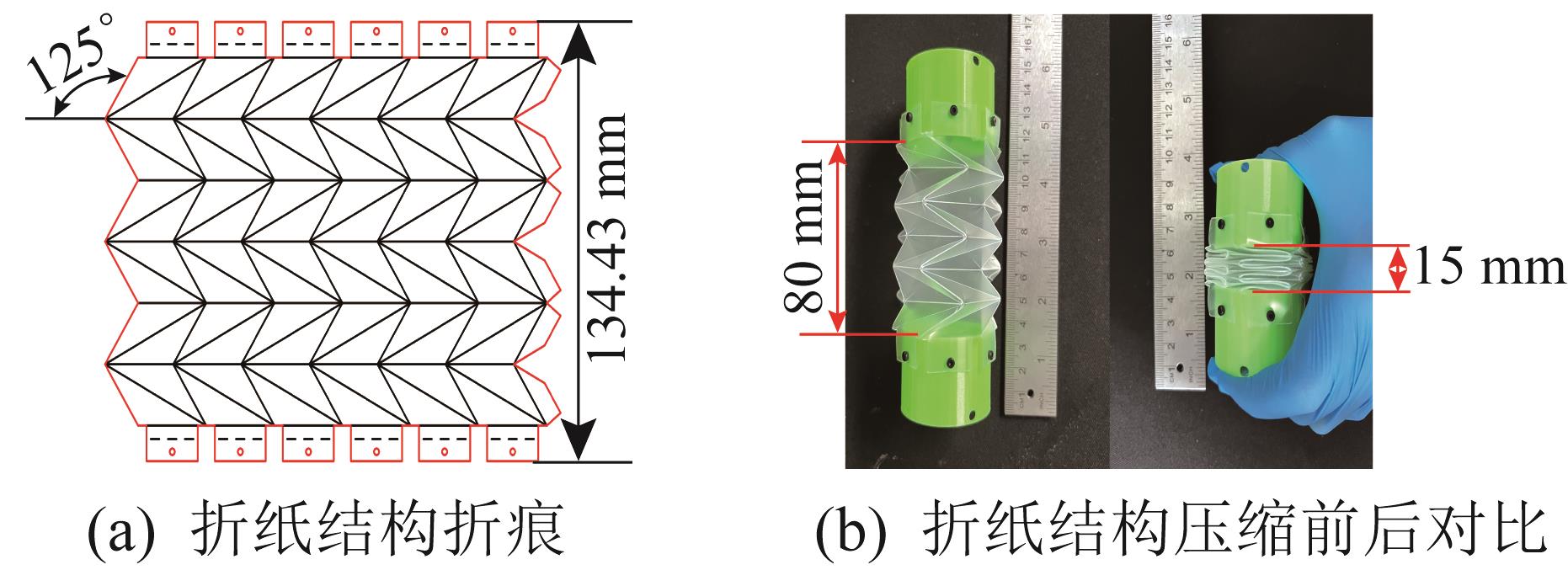
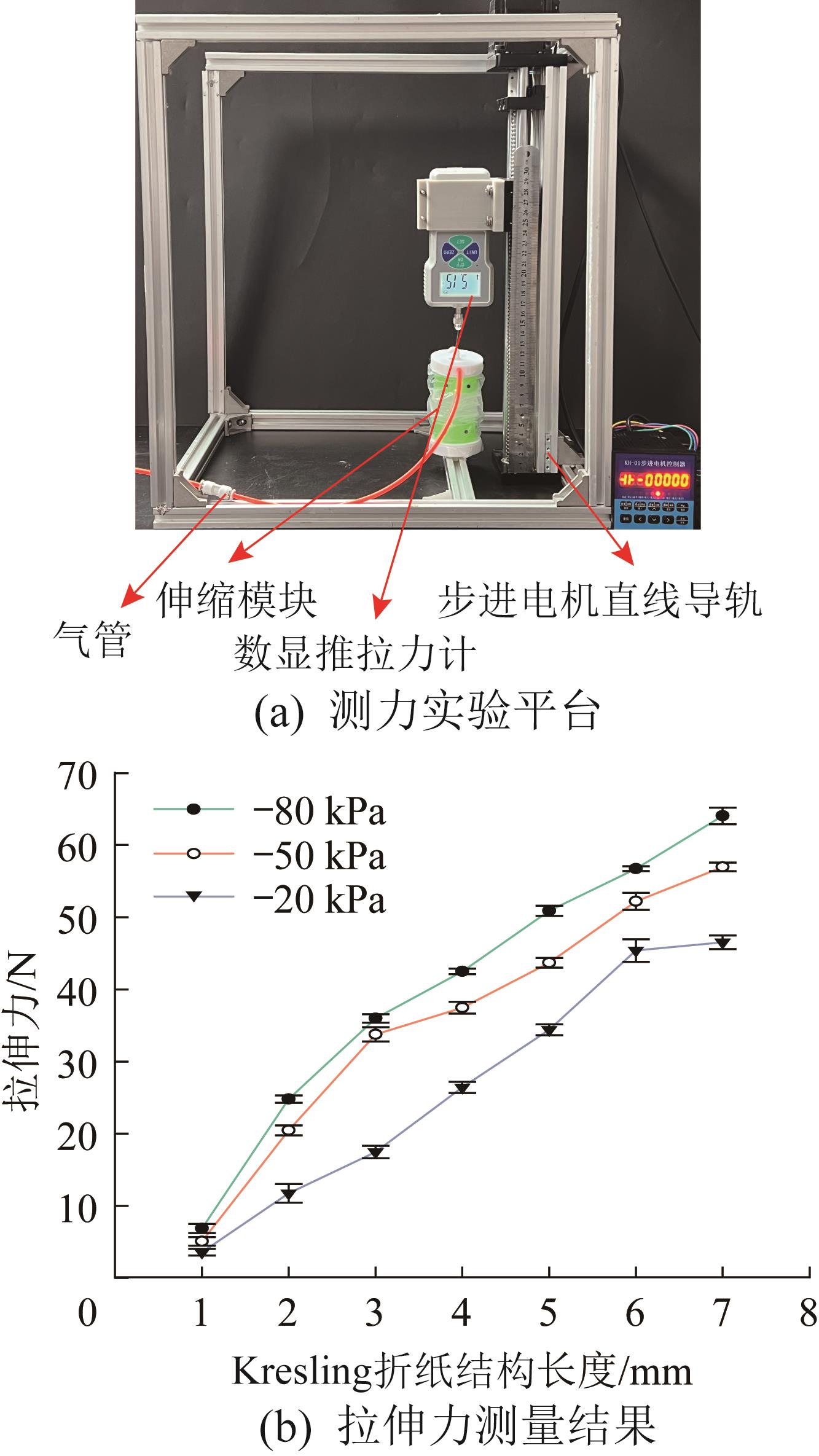
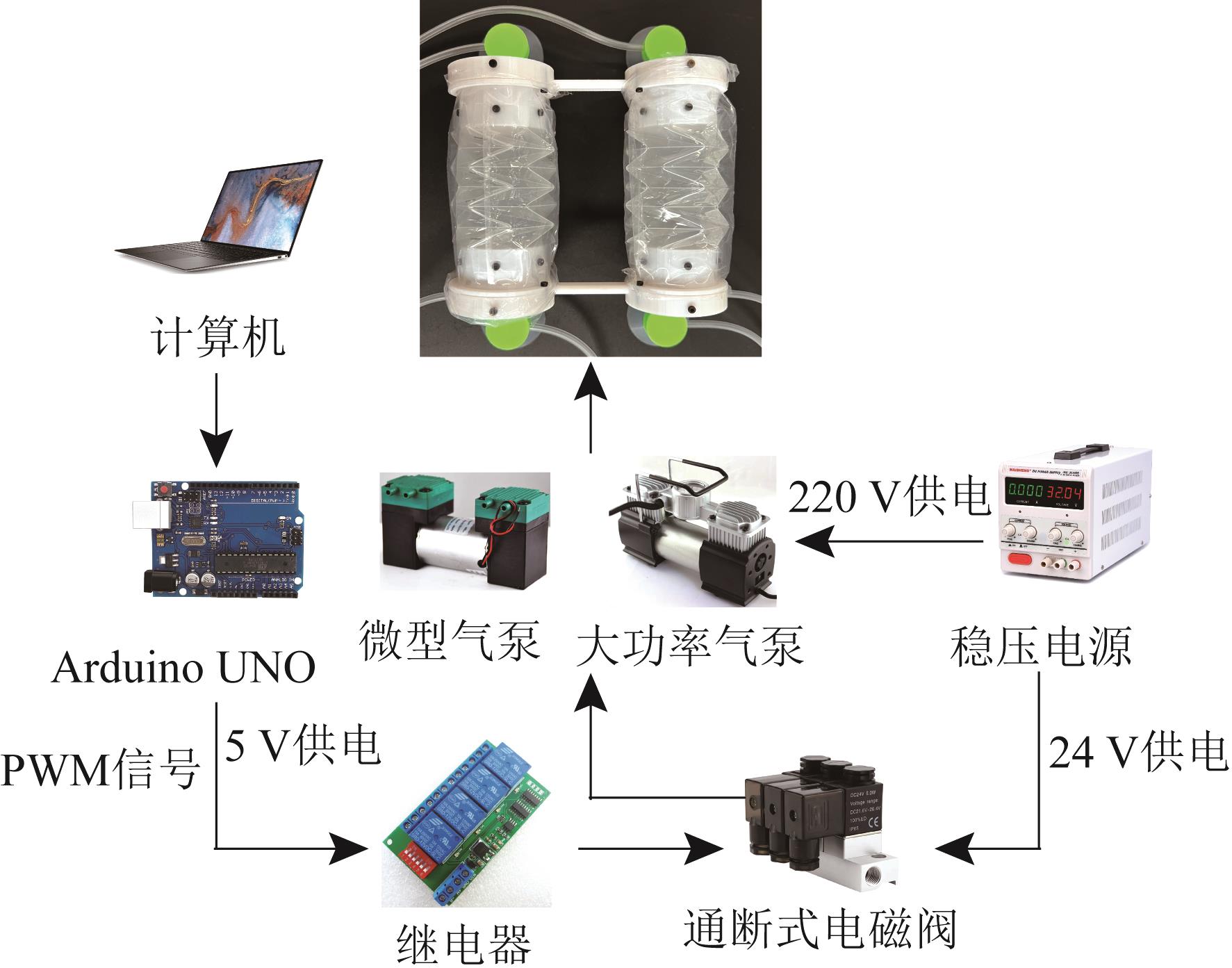
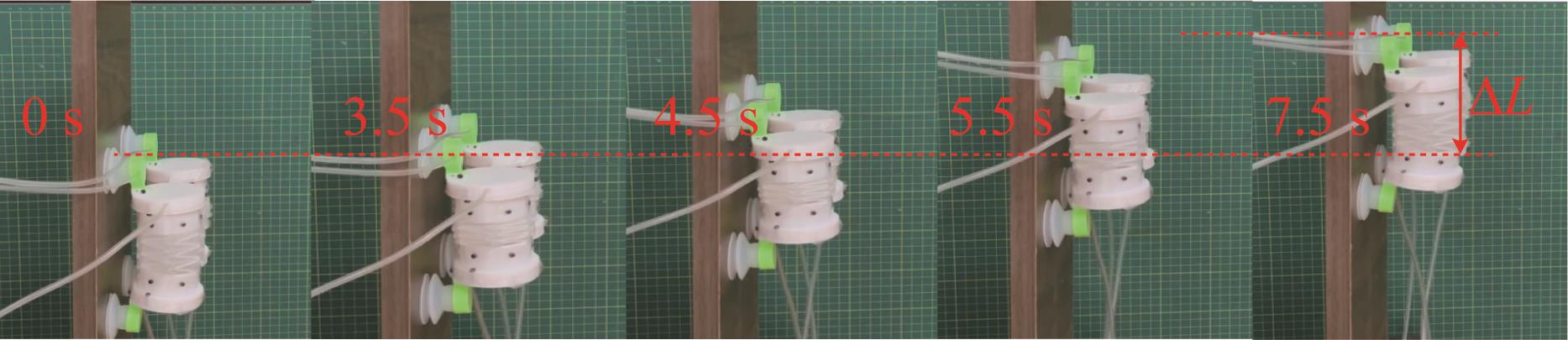
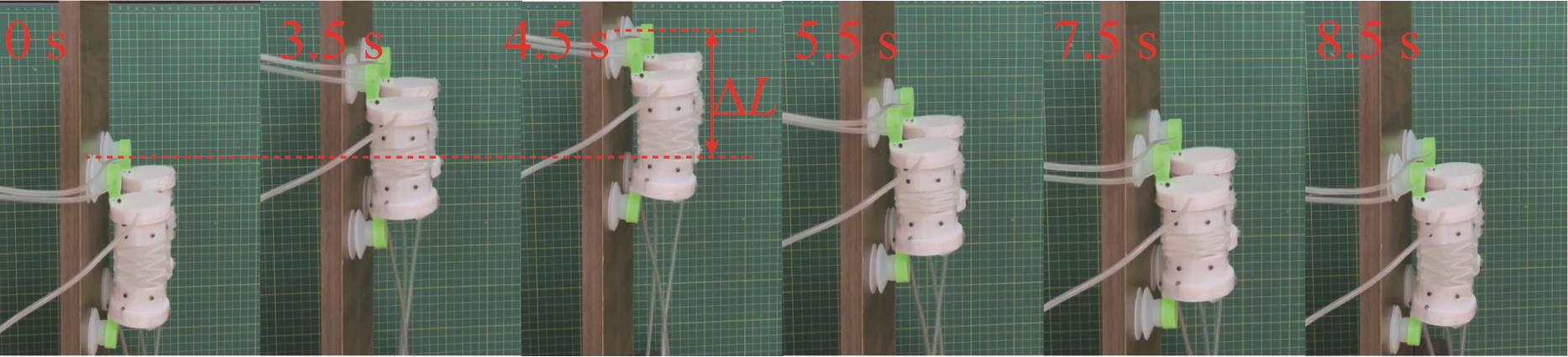
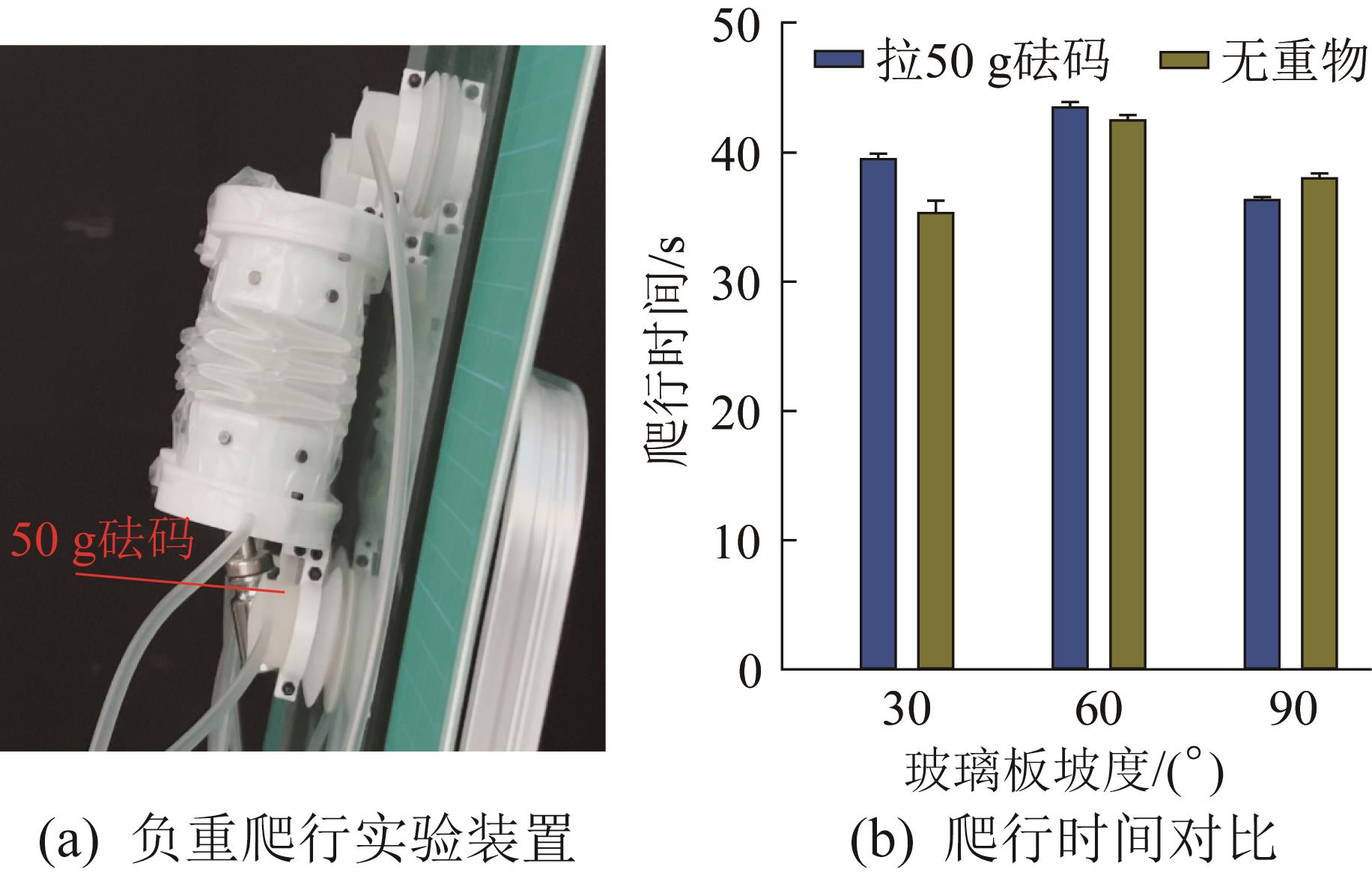
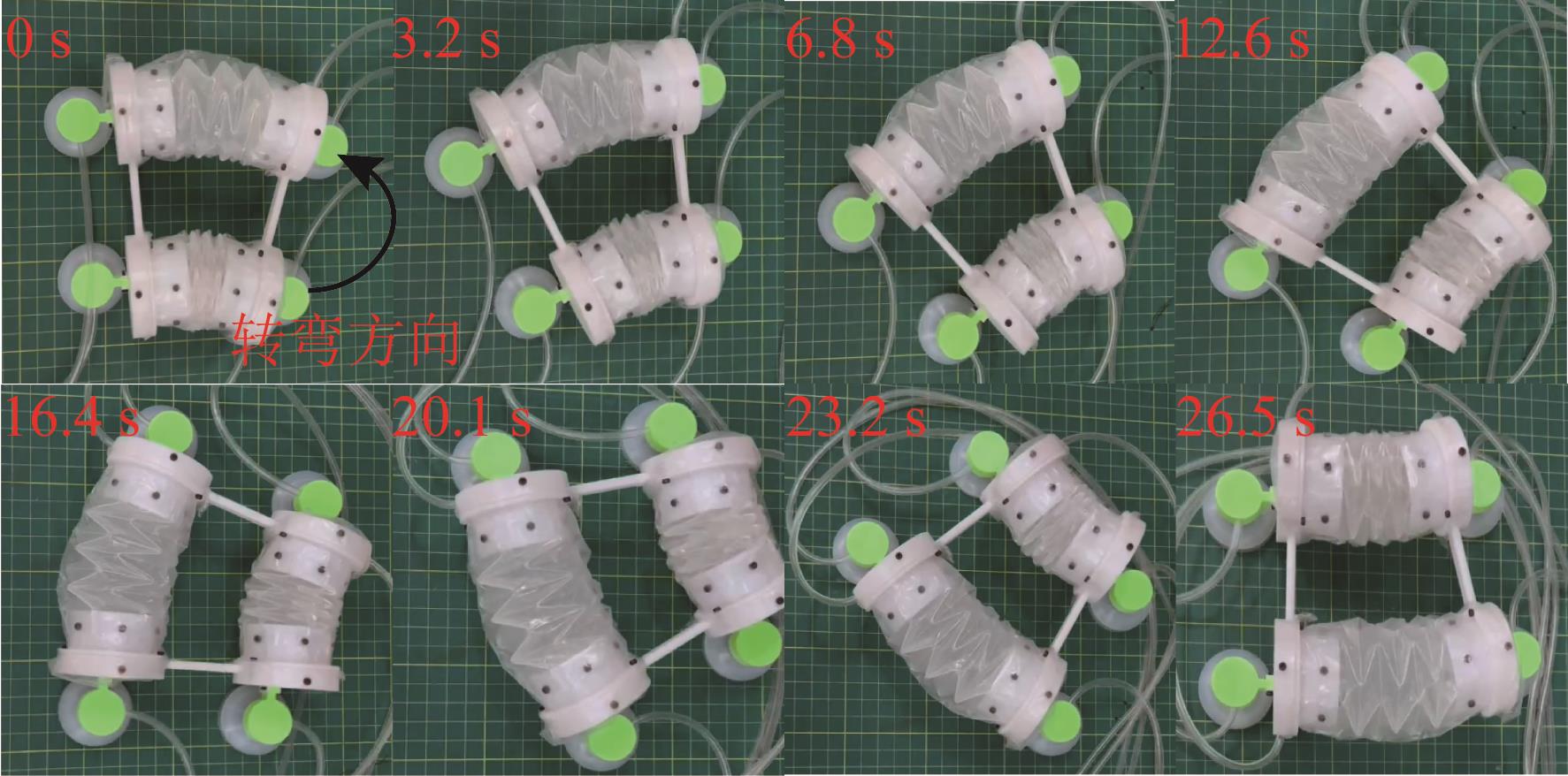
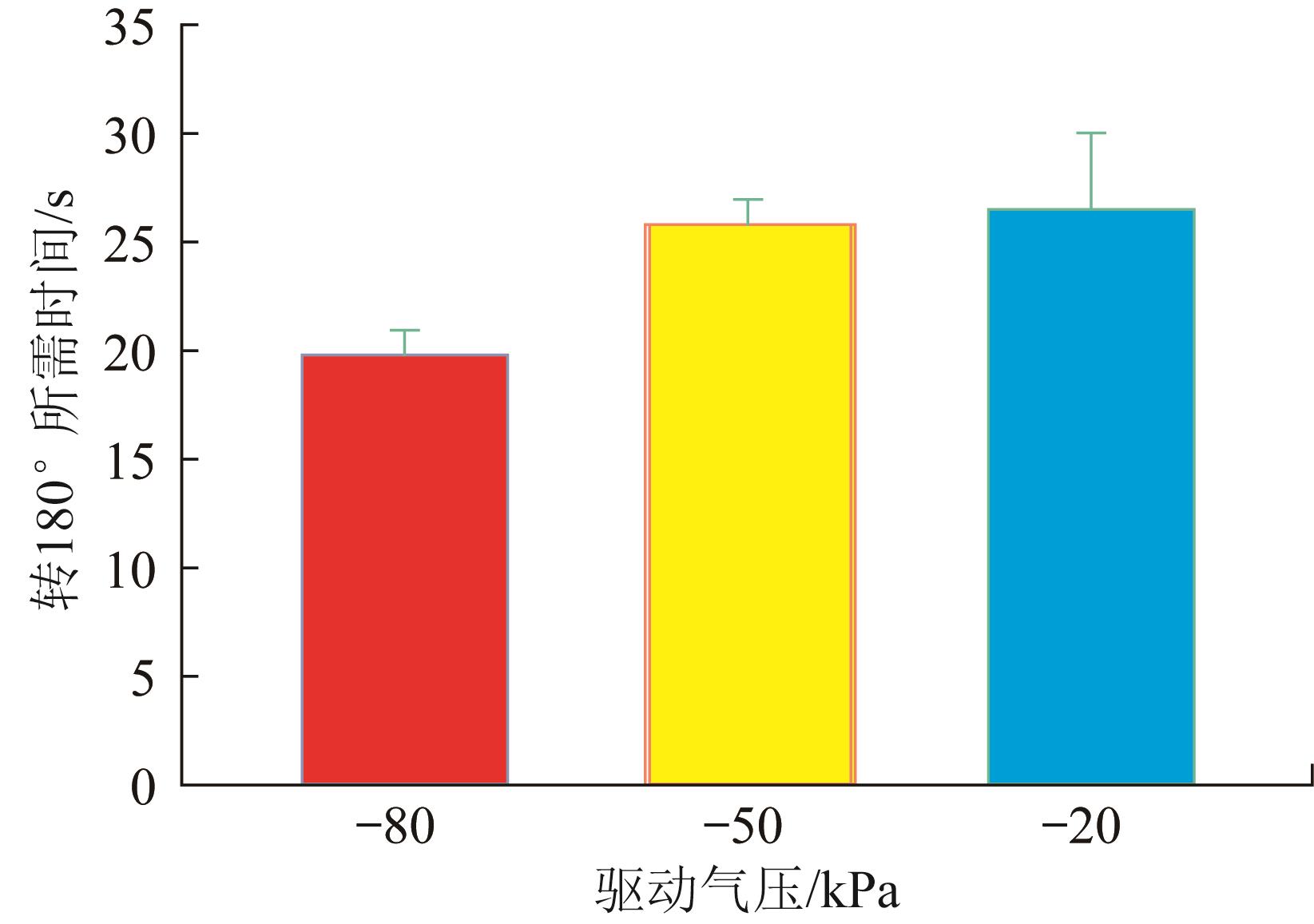
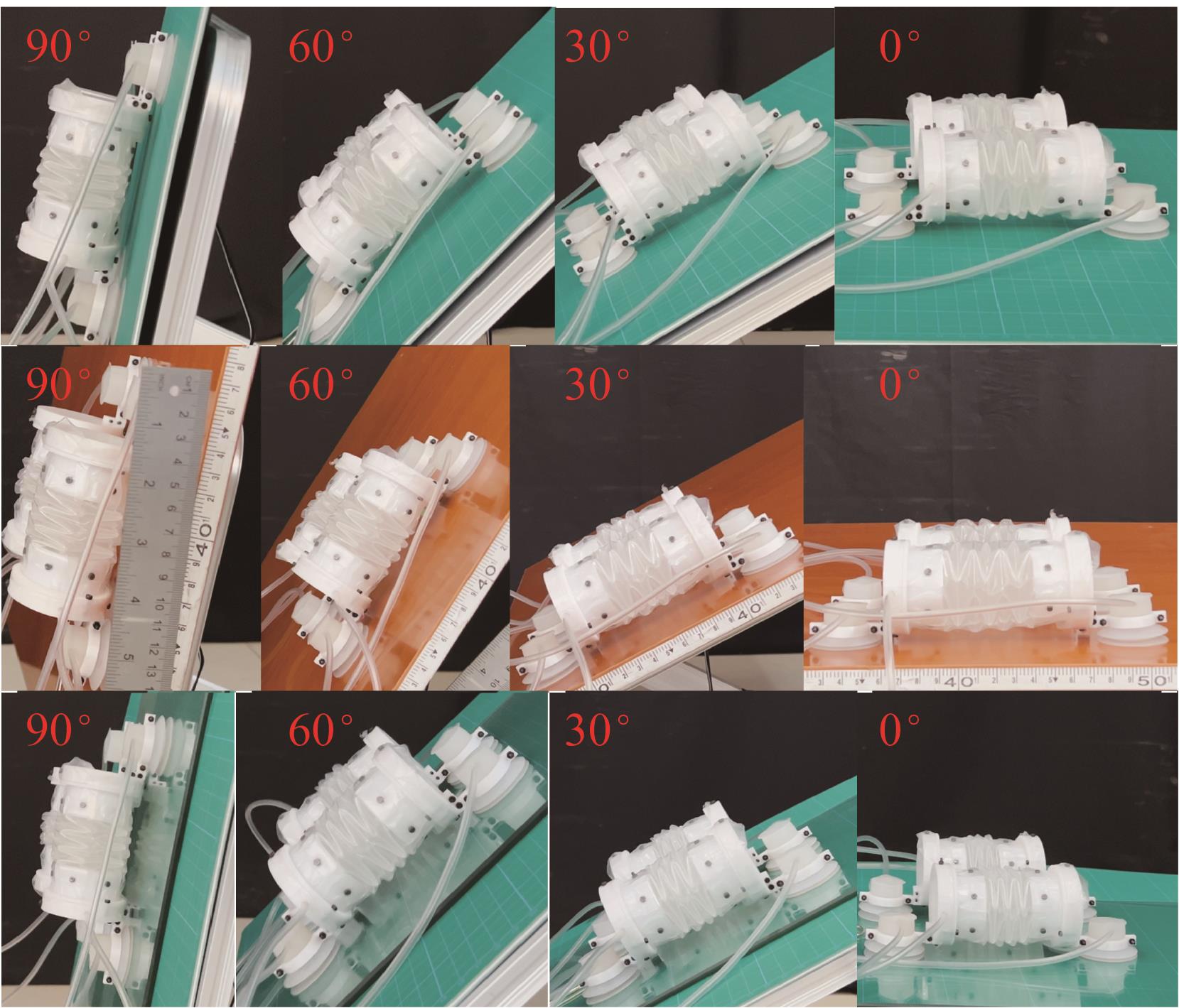
Abstract The soft wall-climbing robot with flexible materials as the main body can change its shape through passive deformation or active deformation to adapt to the complex wall environment. However, due to the low stiffness and lag of flexible materials, the existing soft wall-climbing robots generally suffer from insufficient driving force and poor motion stability, which seriously restricts their practical applications. Aiming at this problem, a flexible pneumatic wall-climbing robot based on the Kresling origami structure was designed. This robot composed of anchoring modules and telescopic modules. The anchoring module achieved anchoring on the wall by the adsorption effect of suction cups under negative pressure. The telescopic module adopted a soft continuum structure with Kresling origami structure and plastic film cover as the main body, achieving extension and contraction. The experimental results indicated that the designed robot could achieve stable crawling at a speed of 25-28 mm/s on the smooth wall with a slope of 0°-90°, and had good adaptability to walls of different materials. The results show that the pneumatic wall-climbing robot based on the Kresling origami structure can not only crawl bidirectionally on walls of different slopes and materials, but also flexibly turn on walls based on the flexibility of the telescopic module, which can provide new ideas for the design and optimization of soft wall-climbing robots.
|
|
Received: 30 April 2024
Published: 06 May 2025
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 323257593@qq.com;hjfsuper@126.com
|
基于Kresling折纸结构的气动爬壁机器人设计与性能分析
以柔性材料为主体的软体爬壁机器人可通过被动变形或主动变形来改变自身形状,以适应复杂的壁面环境。但由于柔性材料的低刚度和滞后性,现有软体爬壁机器人普遍存在驱动力不足及运动稳定性差的问题,严重制约了其实际应用。针对该问题,基于Kresling折纸结构设计了一种可灵活爬行的气动爬壁机器人。该机器人由锚定模块和伸缩模块组成,锚定模块利用吸盘在负压状态下的吸附作用来实现在壁面上的锚定,伸缩模块采用以Kresling折纸结构和塑料薄膜封皮为主体的软连续体结构,可实现伸展和收缩。通过实验测得,所设计的机器人可在坡度为0°~90°的光滑壁面上实现速度为25~28 mm/s的稳定爬行,且对不同材质的壁面均具有良好的适应性。结果表明,基于Kresling折纸结构的气动爬壁机器人不仅能够在不同坡度、不同材质的壁面上双向爬行,还能基于伸缩模块的柔顺性在壁面上灵活转弯,这可为软体爬壁机器人的设计和优化提供新思路。
关键词:
软体爬壁机器人,
软连续体结构,
Kresling折纸结构,
适应性,
双向爬行
|
|
| [1] |
NANSAI S, MOHAN R E. A survey of wall climbing robots: recent advances and challenges[J]. Robotics, 2016, 5(3): 14.
|
|
|
| [2] |
SEO T, JEON Y, PARK C, et al. Survey on glass and façade-cleaning robots: climbing mechanisms, cleaning methods, and applications[J]. International Journal of Precision Engineering and Manufacturing-Green Technology, 2019, 6(2): 367-376.
|
|
|
| [3] |
CHEN S E, CAO Y T, SARPARAST M, et al. Soft crawling robots: design, actuation, and locomotion[J]. Advanced Materials Technologies, 2020, 5(2): 1900837.
|
|
|
| [4] |
DALTORIO K A, WEI T E, HORCHLER A D, et al. Mini-WhegsTM climbs steep surfaces using insect-inspired attachment mechanisms[J]. International Journal of Robotics Research, 2009, 28(2): 285-302.
|
|
|
| [5] |
LEE G, KIM H, SEO K, et al. Series of multilinked caterpillar track-type climbing robots[J]. Journal of Field Robotics, 2016, 33(6): 737-750.
|
|
|
| [6] |
DE RIVAZ S D, GOLDBERG B, DOSHI N, et al. Inverted and vertical climbing of a quadrupedal microrobot using electroadhesion[J]. Science Robotics, 2018, 3(25): eaau3038.
|
|
|
| [7] |
MAHMOOD S K, BAKHY S H, TAWFIK M A. Propeller-type wall-climbing robots: a review[J]. IOP Conference Series: Materials Science and Engineering, 2021, 1094: 012106.
|
|
|
| [8] |
SHEPHERD R F, ILIEVSKI F, CHOI W, et al. Multigait soft robot[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(51): 20400-20403.
|
|
|
| [9] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475.
|
|
|
| [10] |
TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al. A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1(3): 213-223.
|
|
|
| [11] |
YANG H, XU M, LI W H, et al. Design and implementation of a soft robotic arm driven by SMA coils[J]. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6108-6116.
|
|
|
| [12] |
LIU Y, CHEN B D, LI W, et al. Bioinspired triboelectric soft robot driven by mechanical energy[J]. Advanced Functional Materials, 2021, 31(38): 2104770.
|
|
|
| [13] |
TANG Y C, ZHANG Q T, LIN G J, et al. Switchable adhesion actuator for amphibious climbing soft robot[J]. Soft Robotics, 2018, 5(5): 592-600.
|
|
|
| [14] |
GRAULE M A, CHIRARATTANANON P, FULLER S B, et al. Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion[J]. Science, 2016, 352(6288): 978-982.
|
|
|
| [15] |
WU Q Y, PRADEEP V, LIU X Y. A paper-based wall-climbing robot enabled by electrostatic adhesion[C]//2018 IEEE International Conference on Soft Robotics. Livorno, Apr. 24-18, 2018.
|
|
|
| [16] |
GUO Y G, LIU L W, LIU Y J, et al. Review of dielectric elastomer actuators and their applications in soft robots[J]. Advanced Intelligent Systems, 2021, 3(10): 2000282.
|
|
|
| [17] |
胡俊峰, 林茂虎, 王文慧. 微型仿尺蠖软体机器人的设计与实验[J]. 传感器与微系统, 2021, 40(8): 106-109.
HU J F, LIN M H, WANG W H. Design and experiment of miniature inchworm-like soft robot[J]. Transducer and Microsystem Technologies, 2021, 40(8): 106-109.
|
|
|
| [18] |
FU H C, HO J D L, LEE K H, et al. Interfacing soft and hard: a spring reinforced actuator[J]. Soft Robotics, 2020, 7(1): 44-58.
|
|
|
| [19] |
ZHANG Y F, YANG D Z, YAN P N, et al. Inchworm inspired multimodal soft robots with crawling, climbing, and transitioning locomotion[J]. IEEE Transactions on Robotics, 2022, 38(3): 1806-1819.
|
|
|
| [20] |
YU W K, LI X, CHEN D Y, et al. A minimally designed soft crawling robot for robust locomotion in unstructured pipes[J]. Bioinspiration & Biomimetics, 2022, 17(5): 056001.
|
|
|
| [21] |
韩伟涛, 温涛, 刘磊, 等. 基于Kresling折纸结构的软体管道机器人设计[J]. 工程设计学报, 2025, 32(1): 72-81.
HAN W T, WEN T, LIU L, et al. Design of soft pipeline robot based on Kresling origami structure[J]. Chinese Journal of Engineering Design, 2025, 32(1): 72-81.
|
|
|
| [22] |
张春松. 灵巧扭动躯干四足机器人运动学建模、步态规划与稳定性分析[D]. 天津: 天津大学, 2019.
ZHANG C S. Kinematics, gait planning and stability analysis for quadruped robots with twisting trunks[D]. Tianjin: Tianjin University, 2019.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|