| Robotic and Mechanism Design |
|

|
|
|
| Design and analysis of origami-structured coiling soft gripper |
Junlong LI( ),Jun FAN,Renfang HE,Yuanfan CHENG,Junfeng HU() ),Jun FAN,Renfang HE,Yuanfan CHENG,Junfeng HU() |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
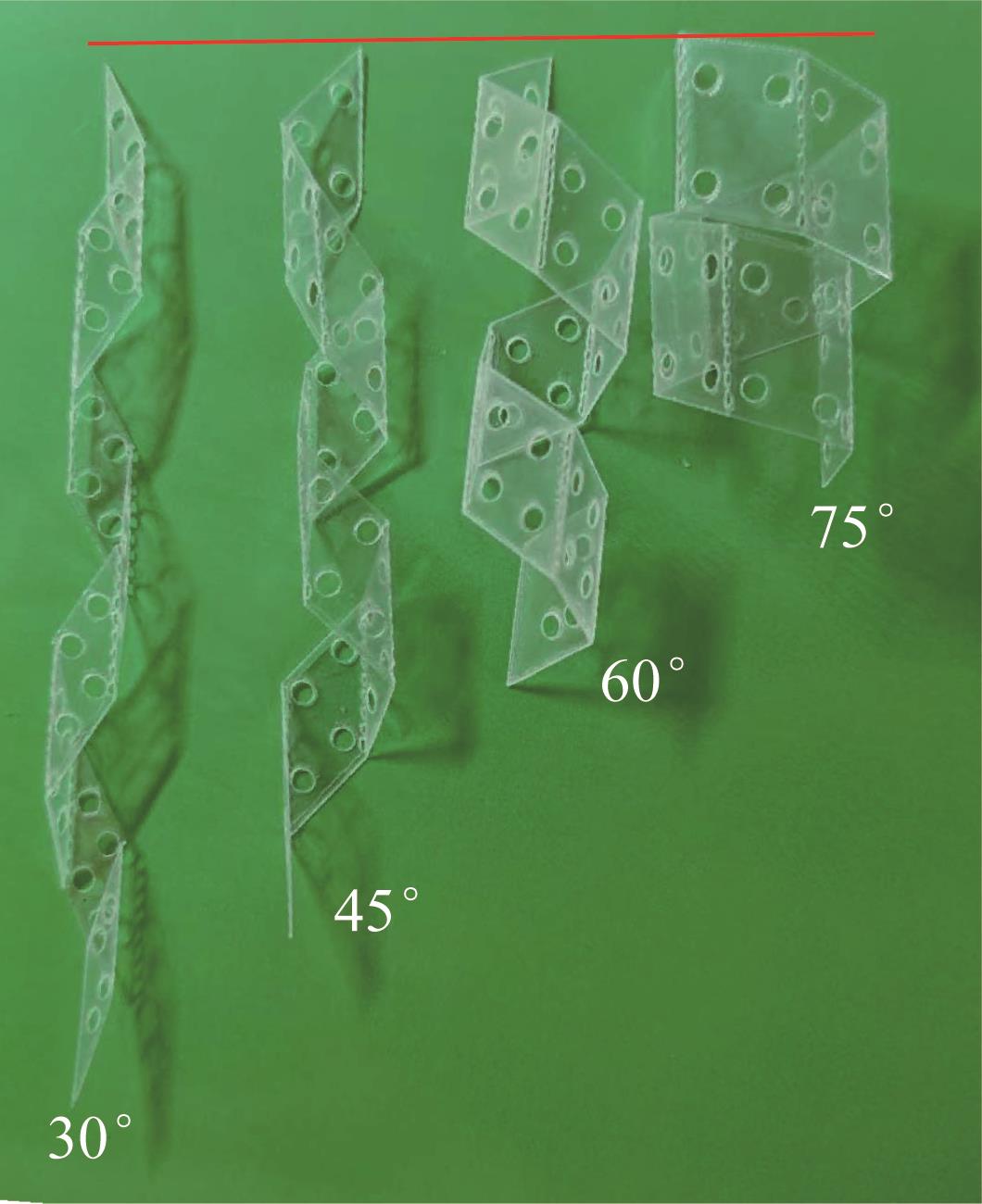
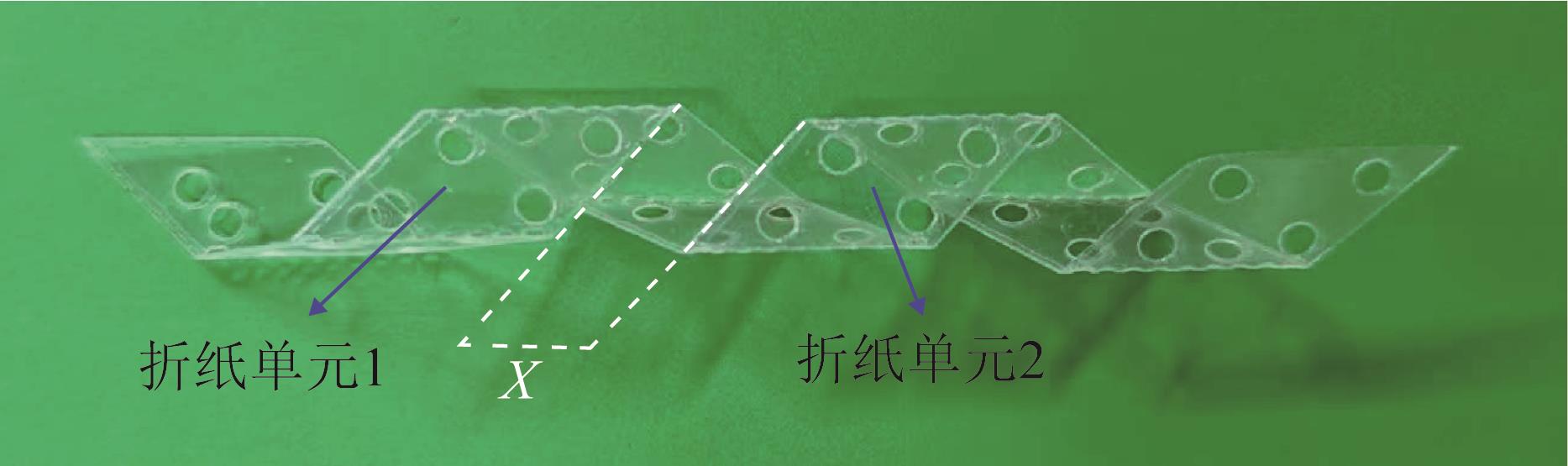
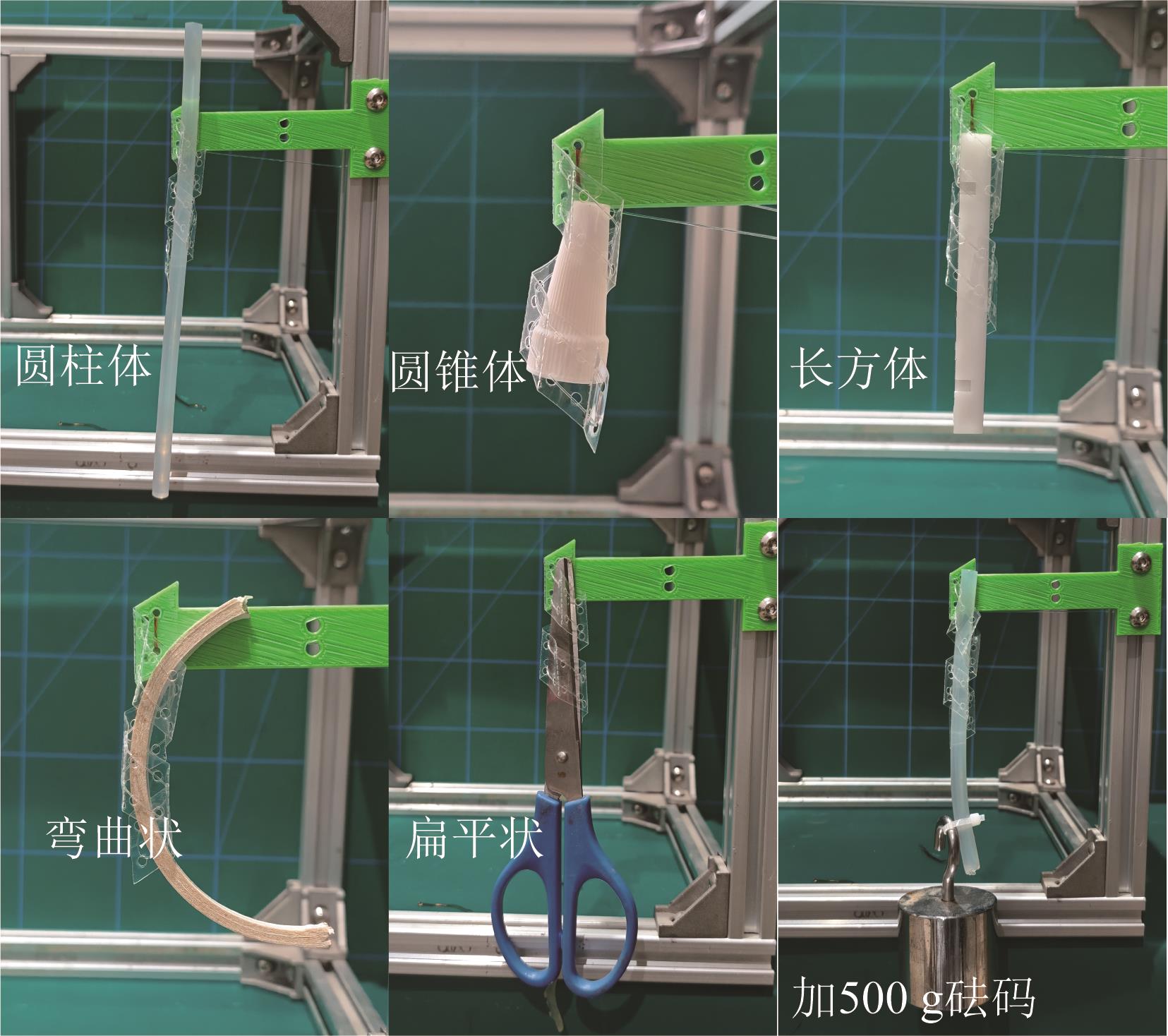
Abstract Existing soft grippers commonly face the issue of limited contact area with objects, while structures capable of large-enveloping grasps are typically characterized by complex and bulky designs, making it difficult to reconcile the need for extensive surface contact with demands for structural simplicity and compactness. To address this trade-off, a novel origami gripper was designed. Drawing inspiration from the coiling motion of snakes, the gripper utilized a motor-driven winding mechanism to pull a string, driving the sequential folding of the origami structure, thereby achieving compliant coiling grasping. Experiments were conducted to analyze the influence of parameters including origami thickness, width, length, and the origami unit adjacent-edge angle on the gripping force. The results demonstrated that the gripper achieved optimal grasping performance when the origami thickness was 0.125 mm, the origami unit adjacent-edge angle was 60°, and the diagonal width was 22 mm. The gripper not only exhibited notable adaptability to both regular and irregular objects, but also demonstrated considerable load-bearing capacity, reliably grasping objects weighing up to 500 g. Characterized by its compact size, simple structure, large enveloping contact area, and substantial gripping strength, the proposed origami gripper provides an innovative technical solution for practical applications such as automated fruit and vegetable harvesting and compliant handling.
|
|
Received: 09 September 2025
Published: 27 June 2026
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 2011360523@qq.com;hjfsuper@126.com
|
折纸结构的缠绕式软体抓手设计与分析
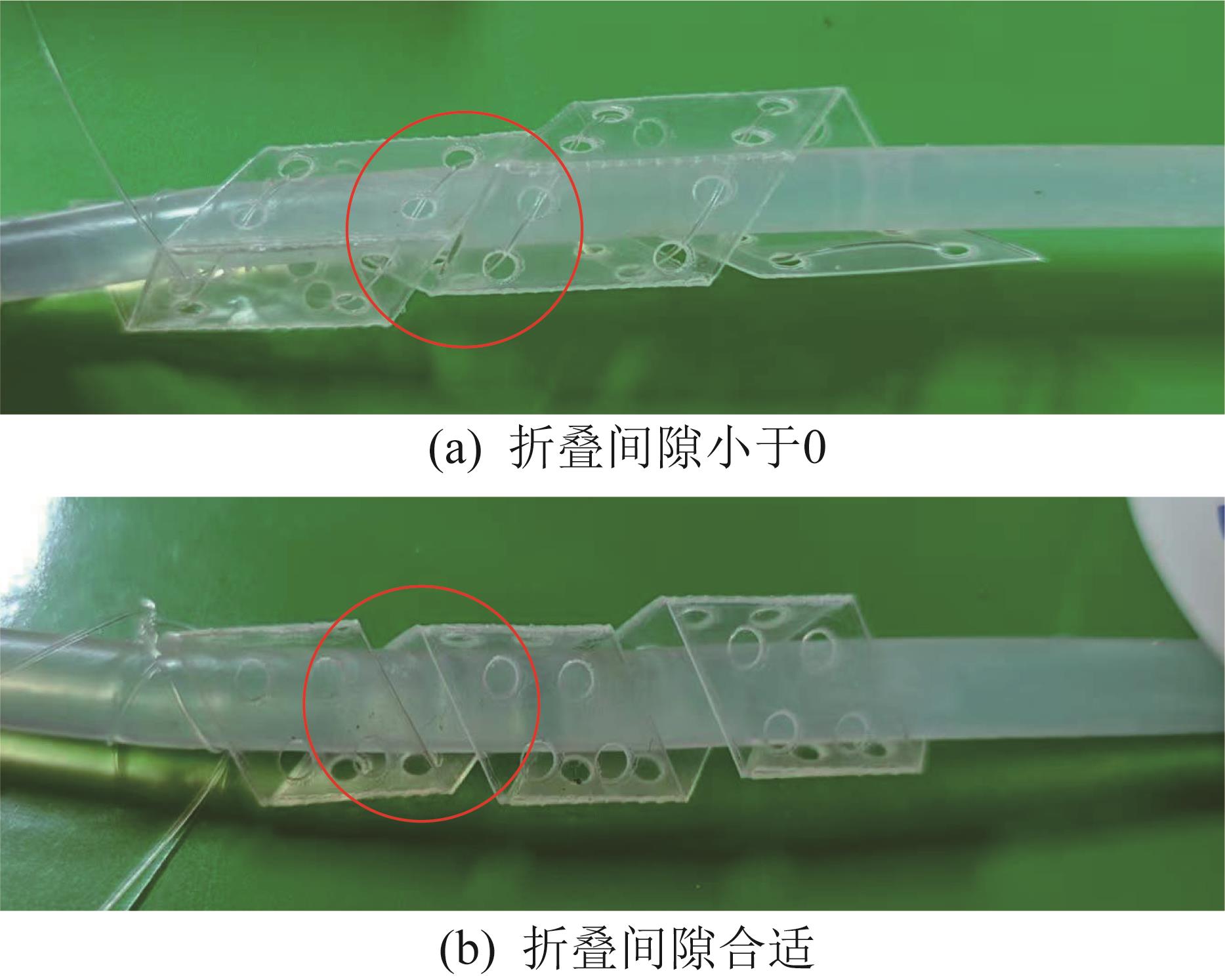
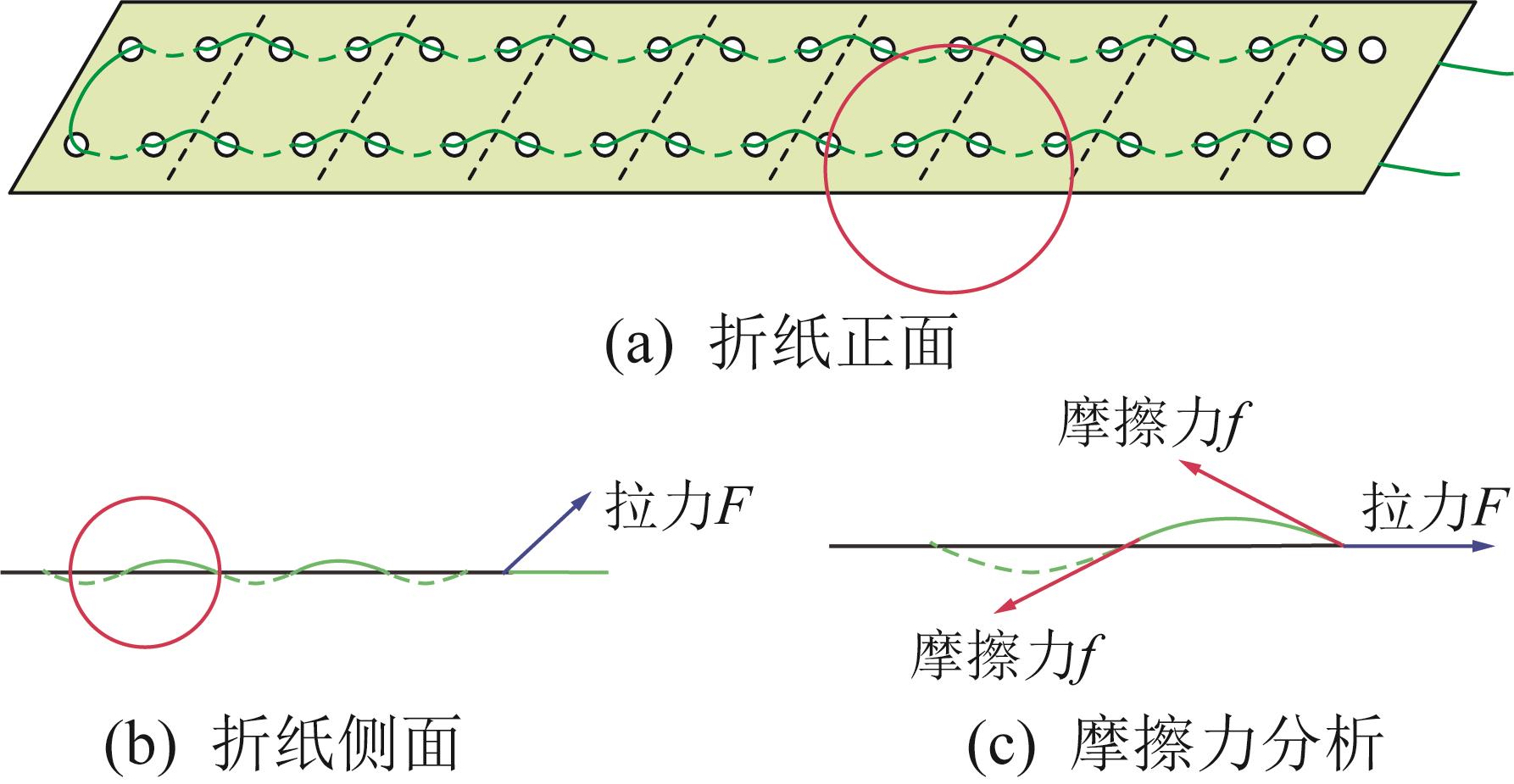
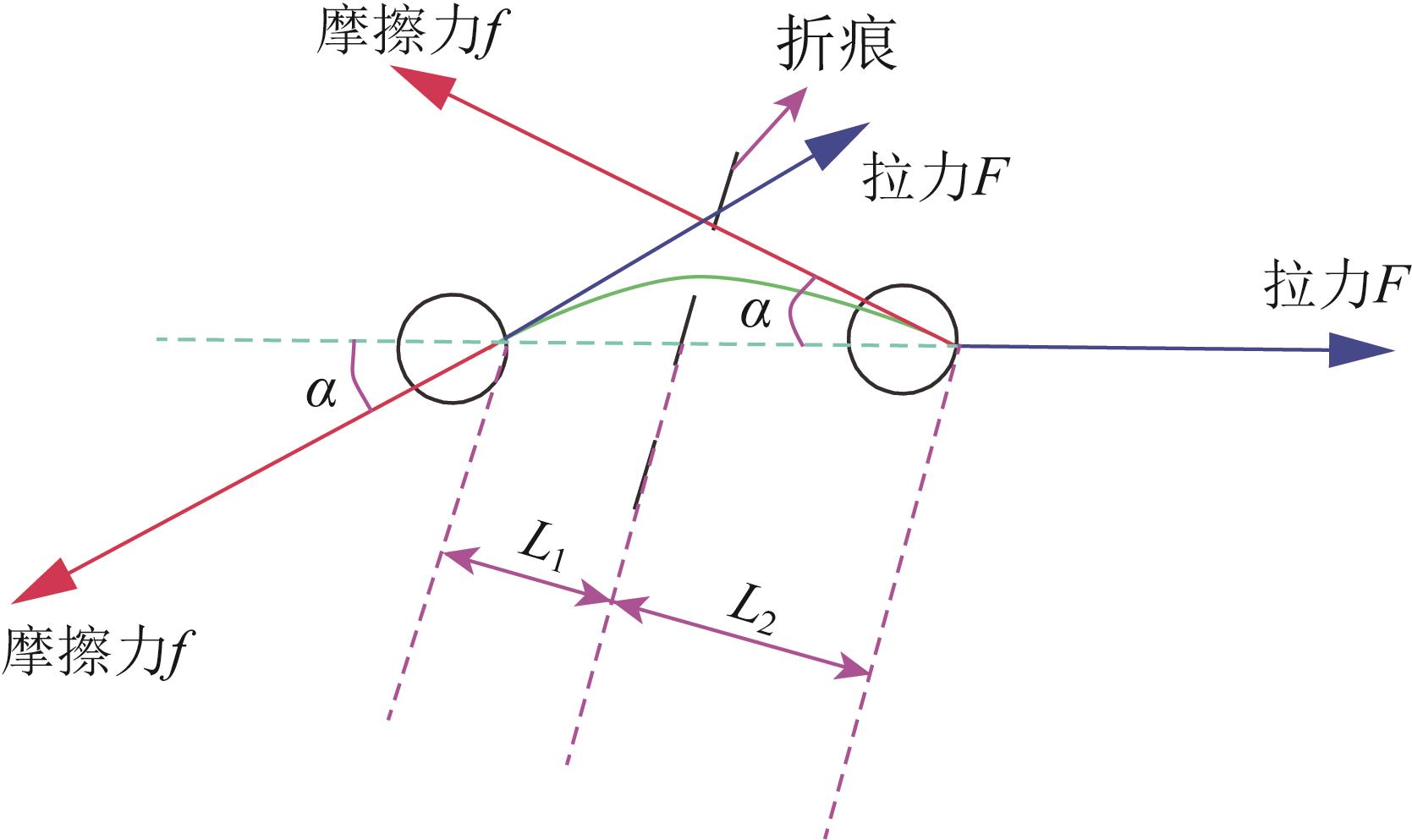
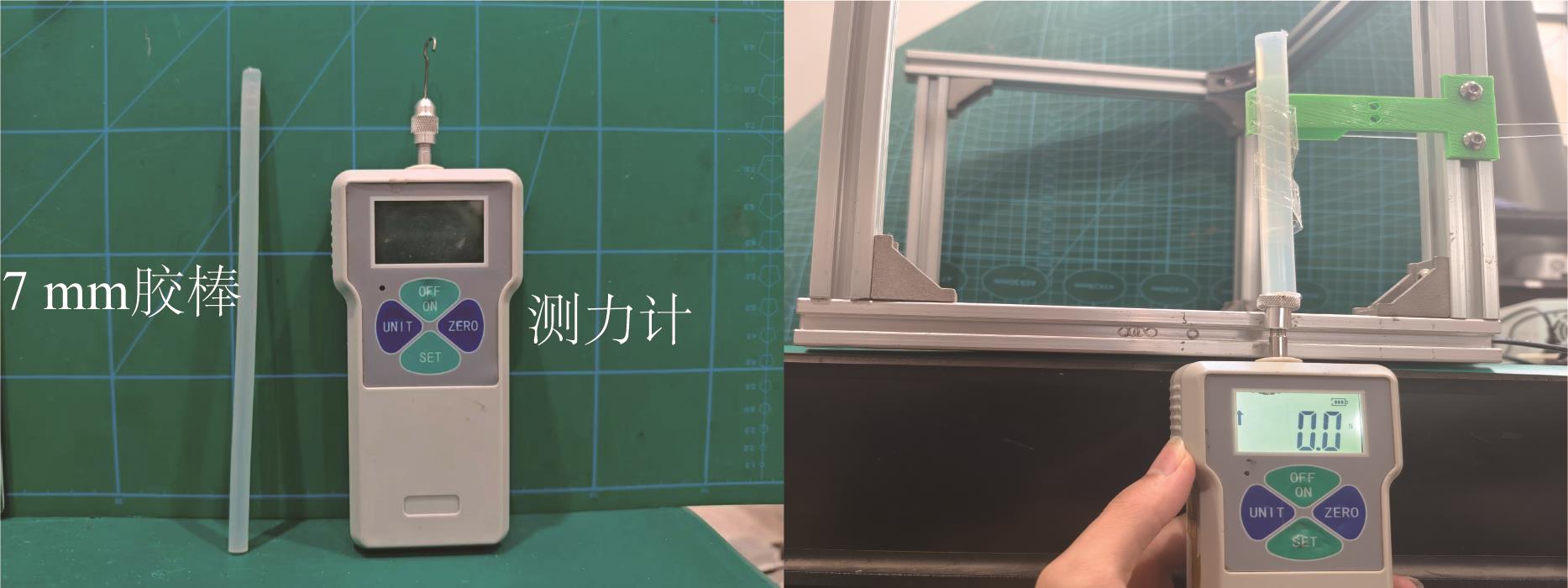
现有软体抓手与物体的接触面积较小,而具备包络抓取能力的结构通常设计复杂、体积庞大,难以在实现大包络面积的同时兼顾结构简洁性与紧凑性。为解决这一矛盾,设计了一种新型折纸抓手。受蛇类缠绕运动的启发,采用电机驱动绕线轮,通过牵引细绳带动折纸结构有序折叠,从而实现柔顺的缠绕式抓取。通过实验分析了折纸厚度、宽度、长度以及折纸单元邻边夹角等参数对抓取力的影响。结果表明,当折纸厚度为0.125 mm、折纸单元邻边夹角为60°、斜边宽度为22 mm时,抓手的抓取性能最优。其不仅对规则物体与不规则物体均具有良好的适应性,而且具备较强的负载能力,可稳定抓取质量达500 g的物体。所设计的折纸抓手体积小巧、结构简单、包络接触面大且承载能力强,为果蔬采摘、柔性搬运等实际应用场景提供了新颖的技术方案。
关键词:
折纸结构,
软体抓手,
绳驱机构,
缠绕抓取
|
|
| [[1]] |
裴昌磊. 双驱动可变刚度柔性抓取机器人系统设计与实验研究[D]. 秦皇岛: 燕山大学, 2024.
PEI C L. Design and experimental study of dual-actuated flexible grabber with variable stiffness[D]. Qinhuangdao: Yanshan University, 2024.
|
|
|
| [[2]] |
LIU M L, WANG C L, SHI C, et al. Bio-inspired deployable cable-driven origami gripper with variable finger length for space capture[J]. Aerospace Science and Technology, 2025, 158: 109844.
|
|
|
| [[3]] |
WANG H Q, YANG X, QU H B, et al. Construction and analysis of a thick-panel origami gripper with soft joints based on square-twist origami tessellation[J]. Thin-Walled Structures, 2025, 210: 113049.
|
|
|
| [[4]] |
ZHANG Y C, QUAN J L, LI P C, et al. A flytrap-inspired bistable origami-based gripper for rapid active debris removal[J]. Advanced Intelligent Systems, 2023, 5(7): 2200468.
|
|
|
| [[5]] |
LIU J, CHEN Z J, WEN G L, et al. Origami chomper‐based flexible gripper with superior gripping performances[J]. Advanced Intelligent Systems, 2023, 5(10): 2300238.
|
|
|
| [[6]] |
CAI X Y, TANG B, LI S Q. Venus flytrap-inspired electromagnetically driven bistable gripper for fast envelope grasping[J]. IEEE Robotics and Automation Letters, 2025, 10(8): 8139-8146.
|
|
|
| [[7]] |
ZHANG C P, SHAO W P, HAO Y P. A bionic bird jumping grasping structure design based on stm32 development board control[J]. Scientific Reports, 2024, 14: 10435.
|
|
|
| [[8]] |
贾江鸣, 叶玉泽, 程培林, 等. 细长果蔬采摘软体气动抓手设计与参数优化[J]. 农业机械学报, 2021, 52(6): 26-34.
JIA J M, YE Y Z, CHENG P L, et al. Design and parameter optimization of soft pneumatic gripper for slender fruits and vegetables picking[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(6): 26-34.
|
|
|
| [[9]] |
LIU W R, BAI X, YANG H, et al. Tendon driven bistable origami flexible gripper for high-speed adaptive grasping[J]. IEEE Robotics and Automation Letters, 2024, 9(6): 5417-5424.
|
|
|
| [[10]] |
YAN T, XU S F, CHUANG K C. A dual-morphing pneumatic origami gripper[J]. Actuators, 2025, 14(4): 166.
|
|
|
| [[11]] |
CAO H W, ZHOU J S, CHEN K, et al. Design and optimization of an origami gripper for versatile grasping and manipulation[J]. Advanced Intelligent Systems, 2024, 6(12): 2400271.
|
|
|
| [[12]] |
邓栋轩,李纪辉,朱志韦,等. 基于折纸结构的收纳式软体抓手设计与试验[J]. 机械工程学报,2024,60(5): 51-58. doi:10.3901/jme.2024.05.051
DENG D X, LI J H, ZHU Z W, et al. Origami-based soft gripper with high folding-unfolding ratio: theory and experiment analysis[J]. Journal of Mechanical Engineering, 2024, 60(5): 51-58.
doi: 10.3901/jme.2024.05.051
|
|
|
| [[13]] |
OKAMOTO S, FUKATSU Y, PREMACHANDRA C, et al. Paper-based bistable origami gripper to make quadcopters multi-functional[J]. IEEE Robotics and Automation Letters, 2024, 9(5): 4511-4518.
|
|
|
| [[14]] |
LIANG H T, HAO G B, OLSZEWSKI O Z, et al. Design of a foldable origami mechanism with helical motion inspired by the Resch Triangular Tessellation[J]. Mechanism and Machine Theory, 2023, 179: 105101.
|
|
|
| [[15]] |
曾阳浩,朱姿娜,史琦婧. 水弹折纸柔性抓手的结构设计与实验研究[J]. 机械科学与技术,2023,42(10): 1602-1608.
ZENG Y H, ZHU Z N, SHI Q J. Structural design and experimental research of flexible gripper for waterbomb origami[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(10): 1602-1608.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|