| 机器人与机构设计 |
|

|
|
|
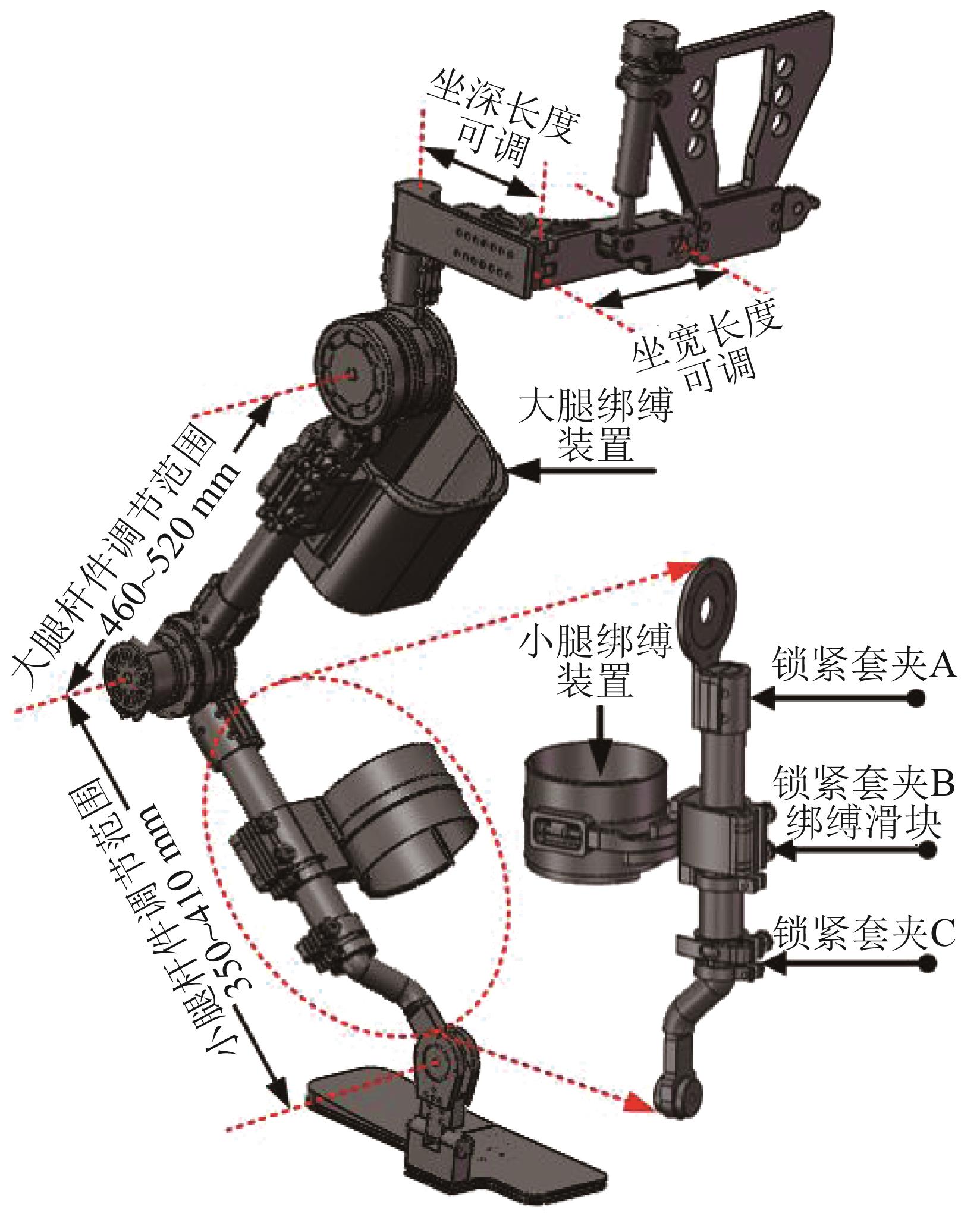
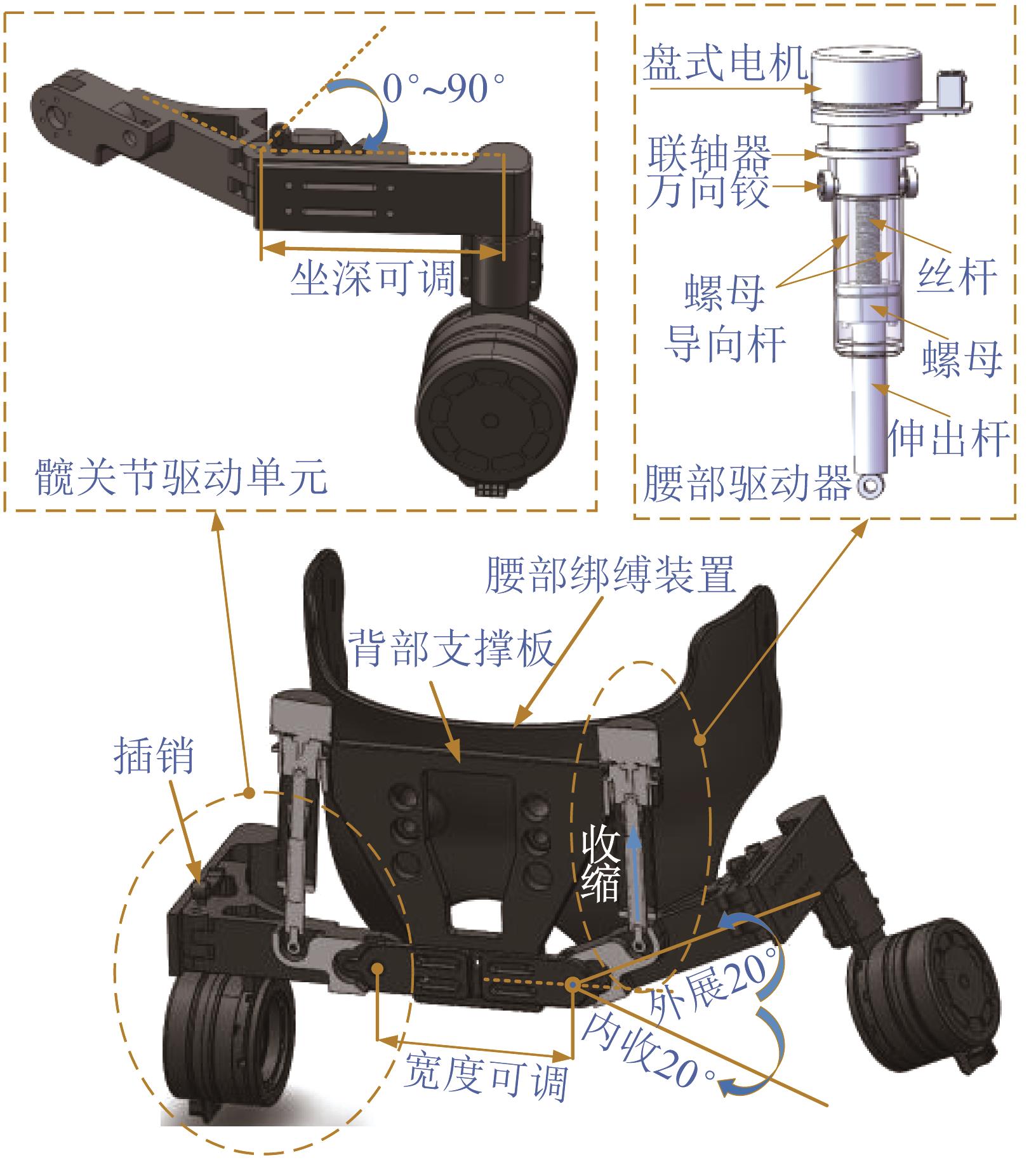
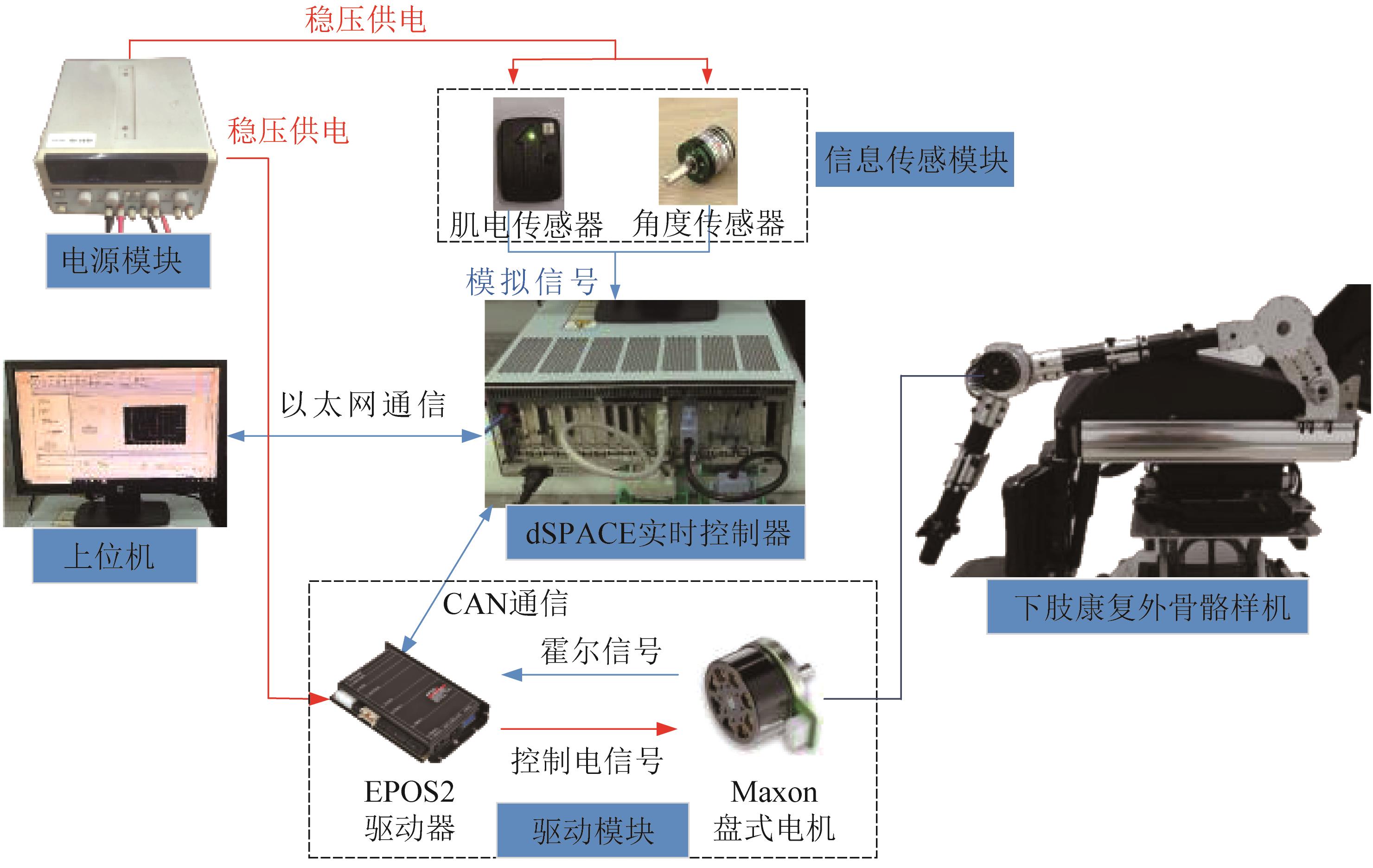
| 下肢康复外骨骼机器人设计与性能分析 |
常佳辰( ),韩亚丽(),孙翰,史传棋,赵天 ),韩亚丽(),孙翰,史传棋,赵天 |
| 南京工程学院 机械工程学院,江苏 南京 211167 |
|
| Design and performance analysis of lower limb rehabilitation exoskeleton robot |
| Jiachen CHANG(),Yali HAN(),Han SUN,Chuanqi SHI,Tian ZHAO |
| School of Mechanical Engineering, Nanjing Institute of Technology, Nanjing 211167, China |
引用本文:
常佳辰,韩亚丽,孙翰,史传棋,赵天. 下肢康复外骨骼机器人设计与性能分析[J]. 工程设计学报, 2024, 31(2): 210-220.
Jiachen CHANG,Yali HAN,Han SUN,Chuanqi SHI,Tian ZHAO. Design and performance analysis of lower limb rehabilitation exoskeleton robot[J]. Chinese Journal of Engineering Design, 2024, 31(2): 210-220.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.119
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I2/210
|
| 1 |
叶诗华,陈丽飞.脑卒中患者延续性护理需求的现状及影响因素分析[J].中国医学创新,2018,15(24):69-72. doi:10.3969/j.issn.1674-4985.2018.24.019
YE S H, CHEN L F. Analysis of status and influencing factors of continuing nursing needs of patients with stroke[J]. Medical Innovation of China, 2018, 15(24): 69-72.
doi: 10.3969/j.issn.1674-4985.2018.24.019
|
| 2 |
ESQUENAZI A, TALATY M. Robotics for lower limb rehabilitation[J]. Physical Medicine and Rehabilitation Clinics of North America, 2019, 30(2): 385-397.
|
| 3 |
程雪,白定群,彭晓华.下肢外骨骼康复机器人在脑卒中康复中的应用和研究进展[J].中国康复医学杂志,2021,36(10):1327-1332. doi:10.3969/j.issn.1001-1242.2021.10.026
CHENG X, BAI D Q, PENG X H. Application and research progress of lower limb exoskeleton rehabilitation robot in stroke rehabilitation[J]. Chinese Journal of Rehabilitation Medicine, 2021, 36(10): 1327-1332.
doi: 10.3969/j.issn.1001-1242.2021.10.026
|
| 4 |
韩稷钰,王衍鸿,万大千.下肢外骨骼康复机器人的研究进展及发展趋势[J].上海交通大学学报(医学版),2022,42(2):241-246.
HAN J Y, WANG Y H, WAN D Q. Research progress and development trend of lower extremity exoskeleton rehabilitation robot[J]. Journal of Shanghai Jiaotong University (Medical Science), 2022, 42(2): 241-246.
|
| 5 |
徐飞,佀国宁,程云章,等.下肢康复机器人结构设计的研究进展[J].北京生物医学工程,2018,37(1):96-102. doi:10.3969/j.issn.1002-3208.2018.01.016
XU F, SI G N, CHENG Y Z, et al. Research advances in structural design of lower limb rehabilitation robot[J]. Beijing Biomedical Engineering, 2018, 37(1): 96-102.
doi: 10.3969/j.issn.1002-3208.2018.01.016
|
| 6 |
李龙飞,朱凌云,苟向锋.可穿戴下肢外骨骼康复机器人研究现状与发展趋势[J].医疗卫生装备,2019,40(12):89-97.
LI L F, ZHU L Y, GOU X F. Current status and development trend of wearable lower-limb exoskeleton rehabilitation robot[J]. Chinese Medical Equipment Journal, 2019, 40(12): 89-97.
|
| 7 |
褚梦秋,佀国宁,李根生,等.下肢康复机器人控制系统研究进展[J].北京生物医学工程,2018,37(6):643-656. doi:10.3969/j.issn.1002-3208.2018.06.014
CHU M Q, SI G N, LI G S, et al. Research progress on control system of lower limb rehabilitation robot[J]. Beijing Biomedical Engineering, 2018, 37(6): 643-656.
doi: 10.3969/j.issn.1002-3208.2018.06.014
|
| 8 |
SUZUKI K, MITO G, KAWAMOTO H, et al. Intention-based walking support for paraplegia patients with robot suit HAL[J]. Advanced Robotics, 2007, 21(12): 1441-1469.
|
| 9 |
BANALA S K, AGRAWAL S K, KIM S H, et al. Novel gait adaptation and neuromotor training results using an active leg exoskeleton[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(2): 216-225.
|
| 10 |
刘亚丽,宋遒志,赵明升,等.基于力位混合控制的踝关节外骨骼机器人四段式助力技术[J].兵工学报,2021,42(12):2722-2730. doi:10.3969/j.issn.1000-1093.2021.12.020
LIU Y L, SONG Q Z, ZHAO M S, et al. The four-stage assisted technology of flexible ankle exoskeleton robot based on force and position hybrid control[J]. Acta Armamentarii, 2021, 42(12): 2722-2730.
doi: 10.3969/j.issn.1000-1093.2021.12.020
|
| 11 |
赵广宇,何龙,李新俊,等.基于支持向量机的外骨骼机器人灵敏度放大控制[J].计算机测量与控制,2016,24(9):211-214.
ZHAO G Y, HE L, LI X J, et al. Support vector machine based sensitivity amplification control for a lower extremity exoskeleton[J]. Computer Measurement and Control, 2016, 24(9): 211-214.
|
| 12 |
石征锦,秦朋,耿枫,等.基于sEMG的一种下肢外骨骼机器人康复训练控制策略[J].信息技术与信息化,2021(1):244-245. doi:10.3969/j.issn.1672-9528.2021.01.075
SHI Z J, QIN P, GENG F, et al. A lower limb exoskeleton robot rehabilitation training control strategy based on sEMG[J]. Information Technology and Informatization, 2021(1): 244-245.
doi: 10.3969/j.issn.1672-9528.2021.01.075
|
| 13 |
王成焘,王冬梅,白雪岭,等.人体骨肌系统生物力学[M].北京:科学出版社,2015.
WANG C T, WANG D M, BAI X L, et al. Biomechanics of human skeletal muscle system[M]. Beijing: Science Press, 2015.
|
| 14 |
全国人类工效学标准化技术委员会. 中国成年人人体尺寸: [S].北京:中国标准出版社,2023:3-23.
National Ergonomics Standardization Technical Committee. Human dimensions of Chinese adults: [S]. Beijing: China Standards Press, 2023: 3-23.
|
| 15 |
韩亚丽,王兴松.人体行走下肢生物力学研究[J].中国科学:技术科学,2011,41(5):592-601.
HAN Y L, WANG X S. Biomechanical study of human walking lower limb[J]. Scientia Sinica (Technologica), 2011, 41(5): 592-601.
|
| 16 |
DELP S L, LOAN J P, HOY M G, et al. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures[J]. IEEE Transactions on Biomedical Engineering, 1990, 37(8): 757-767.
|
| 17 |
DELP S L, ANDERSON F C, ARNOLD A S, et al. OpenSim: open source to create and analyze dynamic simulations of movement[J]. IEEE Transactions on Bio-medical Engineering, 2007, 54(11): 1940-1950.
|
| 18 |
KAWAMOTO H, HAYASHI T, SAKURAI T, et al. Development of single leg version of HAL for hemiplegia[C]//2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Minneapolis, MN, Sep. 3-6, 2009.
|
| 19 |
RODRÍGUEZ-FERNÁNDEZ A, LOBO-PRAT J, FONT-LLAGUNES J M. Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments[J]. Journal of NeuroEngineering and Rehabilitation, 2021, 18: 22.
|
| 20 |
CHAND T. An algorithm for generating muscle-actuated simulations of long-duration movements[C]//Biomedical Computation at Stanford (BCATS) Symposium. Palo Alto, CA: [S.l.], 2006: 31.
|
| 21 |
周瑞.人机耦合下肢外骨骼机器人运动分析及其仿真[D].兰州:兰州理工大学,2020:46-47.
ZHOU R. Kinematics analysis and simulation of human-machine coupled lower extremity exoskeleton robot[D]. Lanzhou: Lanzhou University of Technology, 2020: 46-47.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|