| 机械系统动力学 |
|


|
|
|
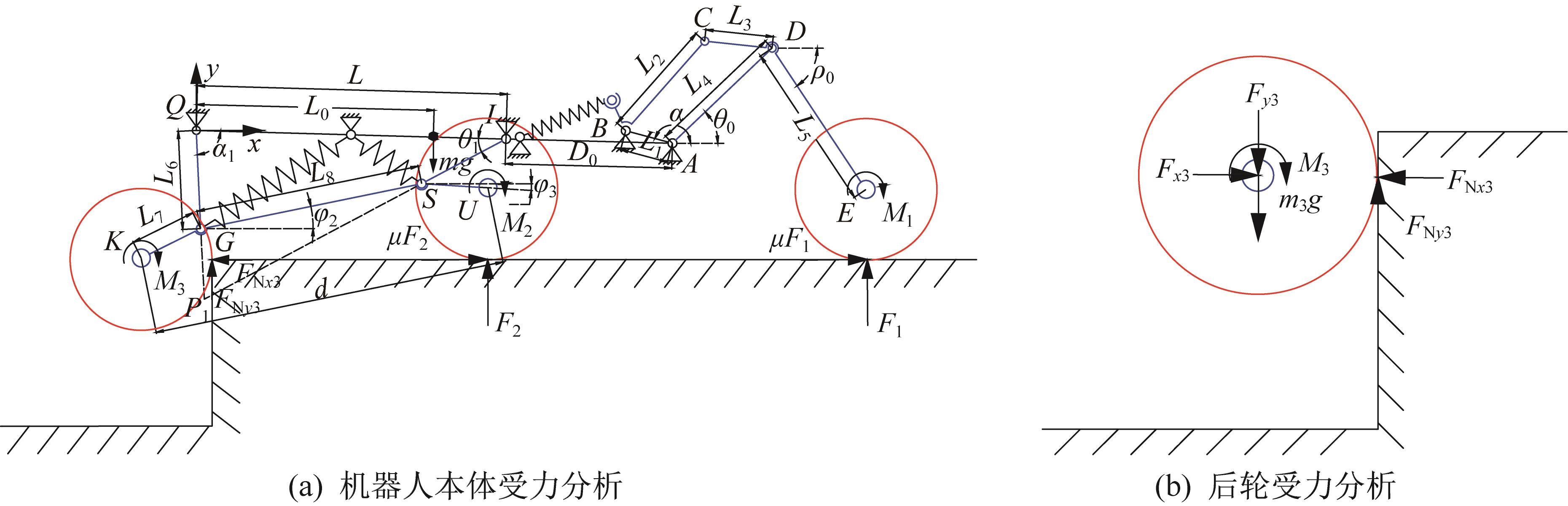
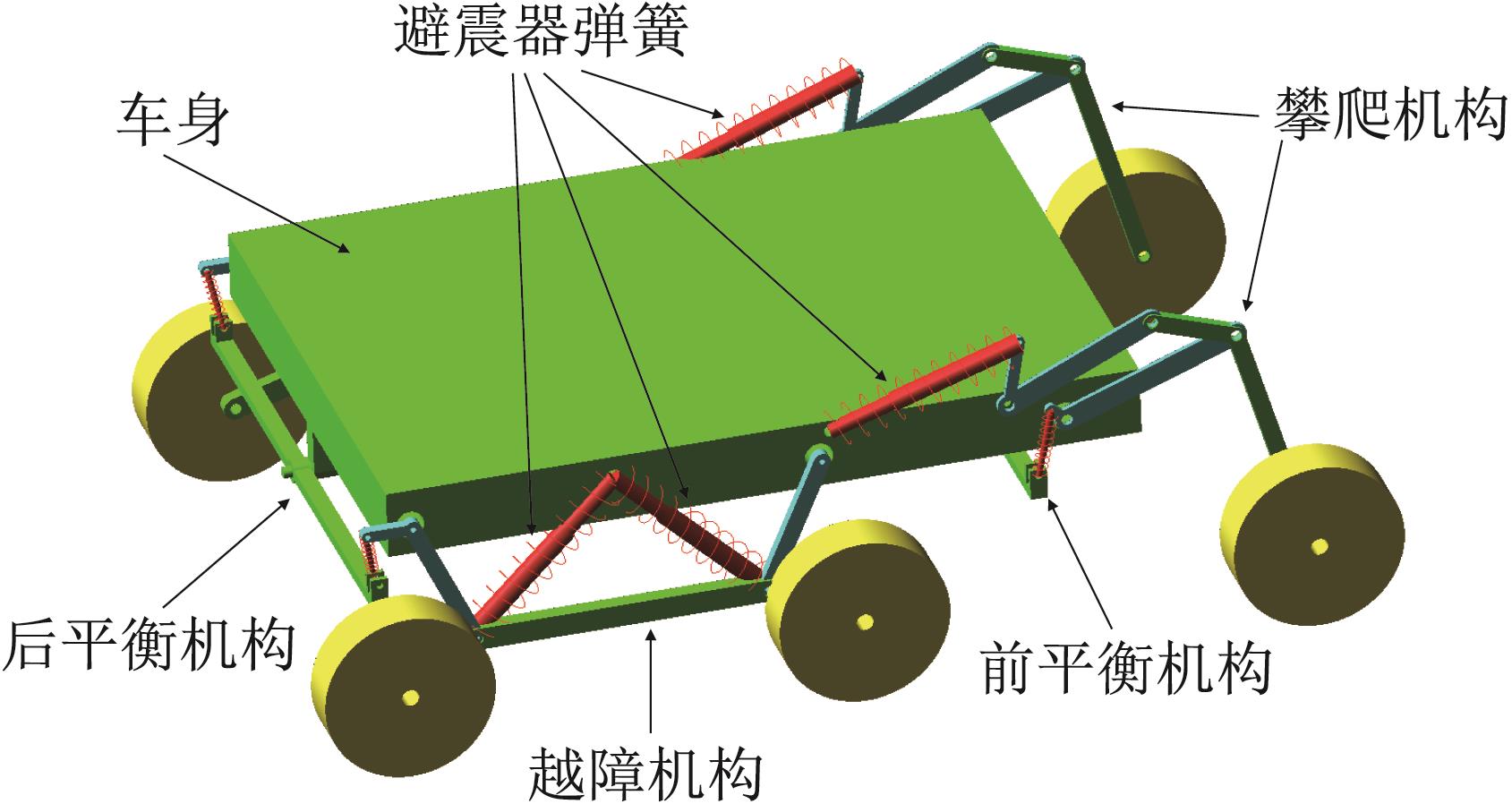
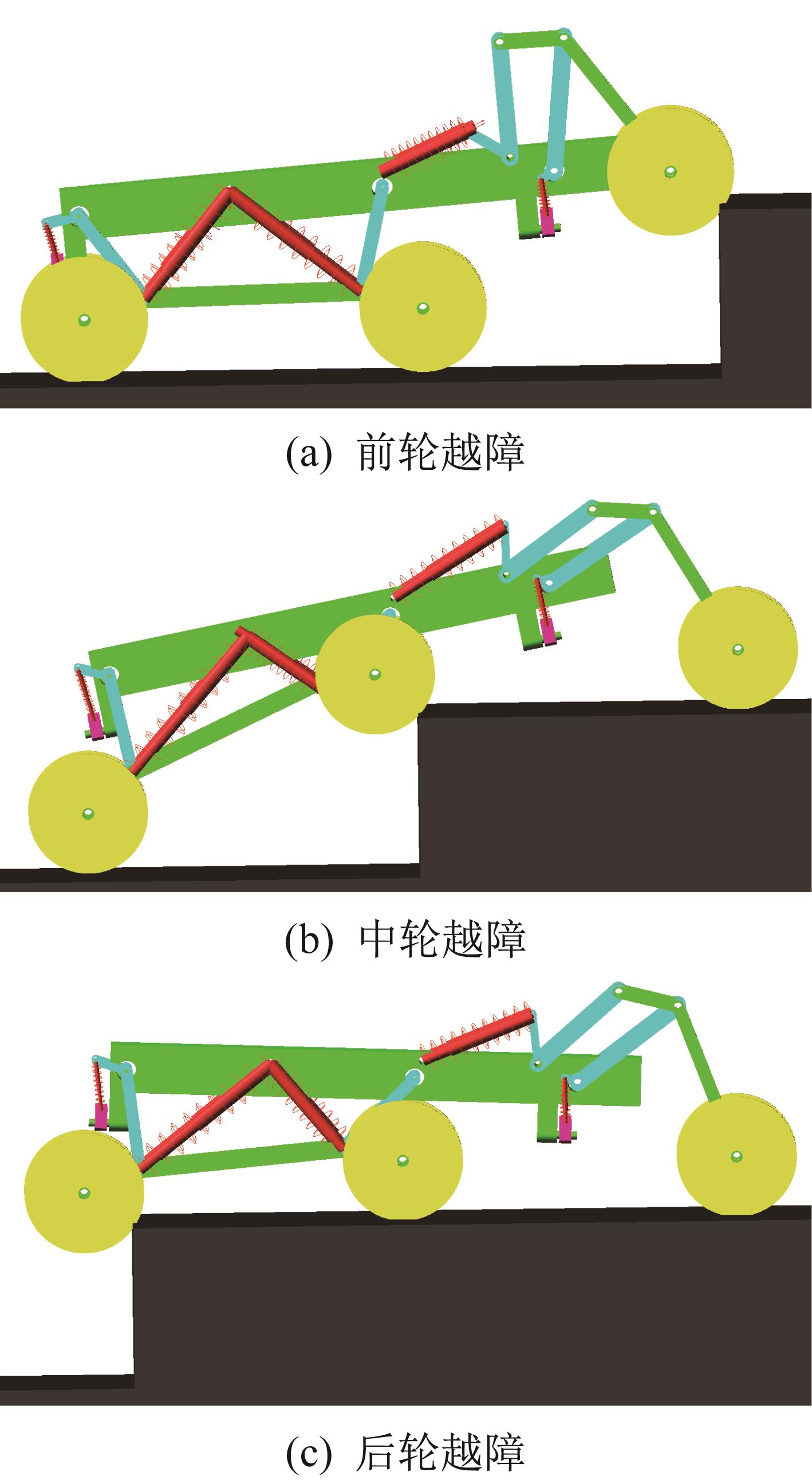
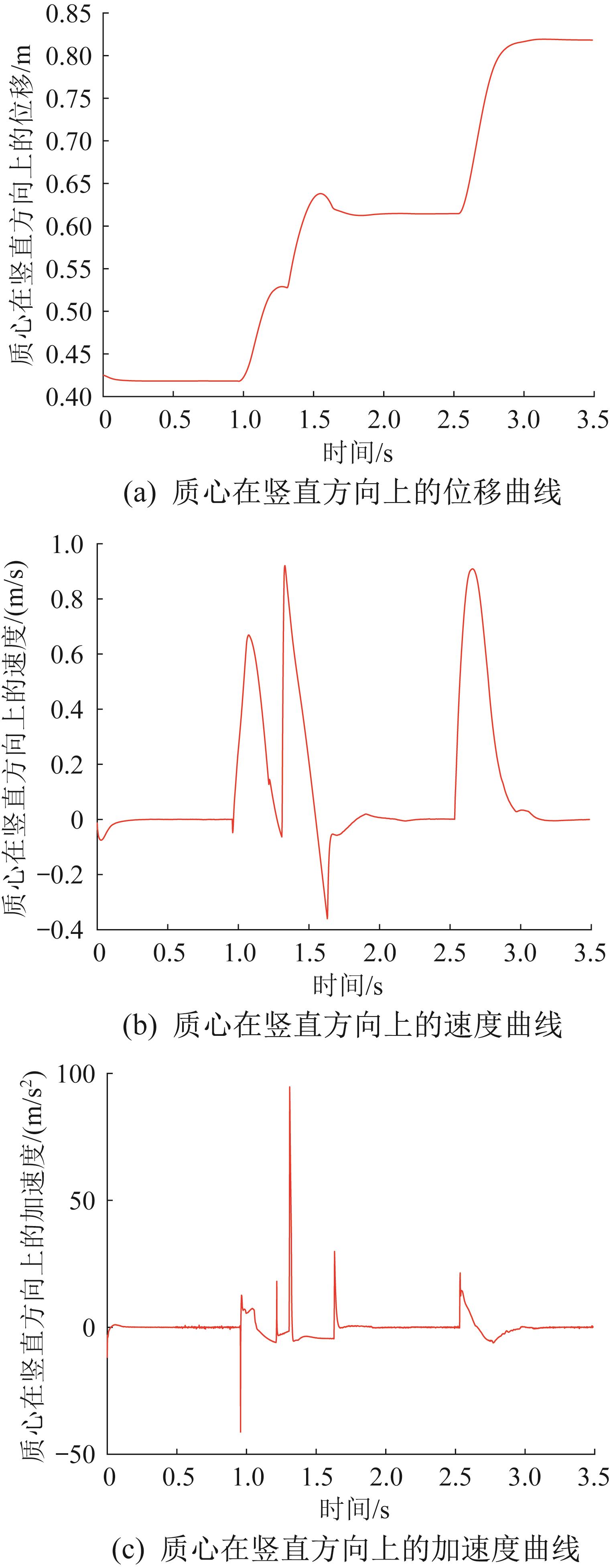
| 轮式搜救机器人地形自适应机构设计及越障性能分析 |
赵迪( ),陈果,陈小利,王熊锦 ),陈果,陈小利,王熊锦 |
| 湖北工业大学 机械工程学院,湖北 武汉 430068 |
|
| Terrain adaptive mechanism design and obstacle-surmounting performance analysis of wheeled search and rescue robot |
| Di ZHAO(),Guo CHEN,Xiaoli CHEN,Xiongjin WANG |
| School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China |
引用本文:
赵迪,陈果,陈小利,王熊锦. 轮式搜救机器人地形自适应机构设计及越障性能分析[J]. 工程设计学报, 2023, 30(5): 579-589.
Di ZHAO,Guo CHEN,Xiaoli CHEN,Xiongjin WANG. Terrain adaptive mechanism design and obstacle-surmounting performance analysis of wheeled search and rescue robot[J]. Chinese Journal of Engineering Design, 2023, 30(5): 579-589.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2023.00.059
或
https://www.zjujournals.com/gcsjxb/CN/Y2023/V30/I5/579
|
| 1 |
祝甜一.基于 ROS 的自主式救援机器人 SLAM 和导航系统研究[D].南京:东南大学,2015:1-4.
ZHU T Y. Research of SLAM and navigation system of autonomous rescue robots based on ROS[D]. Nanjing: Southeast University, 2015: 1-4.
|
| 2 |
杨璐.月球车悬架的机理分析及参数优化[D]. 长春:吉林大学,2007:13-18.
YANG L. Mechanism analysis and parameter optimization on suspension for lunar rover[D]. Changchun: Jilin University, 2007: 13-18.
|
| 3 |
陈百超.月球车新型移动系统设计[D].长春:吉林大学,2009:33-39.
CHEN B C. Design of a locomotion system for lunar rover[D]. Changchun: Jilin University, 2009: 33-39.
|
| 4 |
陈世荣,许旻,杨杰.双曲柄机构在移动机器人中的应用与优化[J].中国机械工程,2007,18(10):1139-1142. doi:10.3321/j.issn:1004-132X.2007.10.002
CHEN S R, XU M, YANG J. Design and optimization of fork using in robot[J]. China Mechanical Engineering, 2007, 18(10): 1139-1142.
doi: 10.3321/j.issn:1004-132X.2007.10.002
|
| 5 |
尚建忠.空间探测机器人移动机构及系统研究[D].武汉:华中科技大学,2006:45-50.
SHANG J Z. Research on the locomotion mechanism and system of space exploring robot[D]. Wuhan: Huazhong University of Science and Technology, 2006: 45-50.
|
| 6 |
刘金生.基于ADAMS六轮悬架式火星车的建模与仿真[D].北京:北京邮电大学,2019:11-16.
LIU J S. Modeling and simulation of a six-wheel suspended rovers based on ADAMS[D]. Beijing: Beijing University of Posts and Telecommunications, 2019: 11-16.
|
| 7 |
NASA. A brief history of the lunar roving vehicle[EB/OL].(2002-04-03)[2022-05-17]. .
|
| 8 |
卢波,范嵬娜.国外月球车及火星车技术发展综述[C]//中国空间科学学会空间探测专业委员会第十八次学术会议论文集(上册).重庆:中国空间科学学会,2005:69-75.
LU B, FAN W N. A review of the development of lunar rover and mars rover technology abroad [C]//Proceedings of the 18th Academic Conference of Space Exploration Committee of Chinese Society of Space Sciences. Chongqing: Chinese Society of Space Sciences, 2005: 69-75.
|
| 9 |
THUEER T. Mobility evaluation of wheeled all-terrain robots[J]. Robotics & Autonomous Systems, 2010, 58(5): 508-519.
|
| 10 |
杨武林.自适应关节轮式移动机器人设计与研究[D].绵阳:西南科技大学,2020:12-14.
YANG W L. Design and research of adaptive-joint wheeled mobile robot[D]. Mianyang: Southwest University of Science and Technology, 2020: 12-14.
|
| 11 |
关似玉.六轮全地形移动机器人的结构设计及样机研制[D].北京:北京石油化工学院,2016:14-24.
GUAN S Y. Structural design and prototype development of a six wheel all-terrain mobile robot[D]. Beijing: Beijing Institute of Petrochemical Technology, 2016: 14-24.
|
| 12 |
王奉晨.全地形轮式移动机器人设计与性能分析[D].成都:西南交通大学,2018:2-7.
WANG F C. Design and performance analysis of all-terrain wheel mobile robot[D]. Chengdu: Southwest Jiaotong University, 2018: 2-7.
|
| 13 |
杨飞.轮式星球漫游车移动机构折展构型综合与分析[D].哈尔滨:哈尔滨工业大学,2014:2-5. doi:10.3901/jme.2014.05.001
YANG F. Structural synthesis and analysis of folded-deployable locomotion system for wheeled planetary rover[D]. Harbin: Harbin University of Technology, 2014: 2-5.
doi: 10.3901/jme.2014.05.001
|
| 14 |
魏毅龙.煤矿井下探测与搜救机器人机械系统设计与研究[D].徐州:中国矿业大学,2014:8-22.
WEI Y L. Design and study of the mechanical system for mine detection and rescue robot[D]. Xuzhou: China University of Mining and Technology, 2014: 8-22.
|
| 15 |
张彦囡.基于多组连杆机构的爬楼越障机器人的设计与分析[D].青岛:山东科技大学,2017:9-17.
ZHANG Y N. Design and analysis of climbing robot based on multi-group linkage mechanism[D]. Qingdao: Shandong University of Science and Technology, 2017: 9-17.
|
| 16 |
魏军英,杨世强,王吉岱,等.八轮式爬楼越障机器人设计与仿真分析[J].机械科学与技术,2019,38(10):1519-1525. doi:10.13433/j.cnki.1003-8728.20190014
WEI J Y, YANG S Q, WANG J D, et al. Design and simulation analysis of an eight-wheeled climbing obstacle robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(10): 1519-1525.
doi: 10.13433/j.cnki.1003-8728.20190014
|
| 17 |
曹冲振,张吉亮,王凤芹,等.虾形六轮移动机器人头部机构综合[J].山东科技大学学报(自然科学版),2010,29(1):58-61. doi:10.16452/j.cnki.sdkjzk.2010.01.018
CAO C Z, ZHANG J L, WANG F Q, et al. Synthesis of the head mechanism for a new shrimp-shaped six-wheel mobile robot[J]. Journal of Shandong University of Science and Technology (Natural Science), 2010, 29(1): 58-61.
doi: 10.16452/j.cnki.sdkjzk.2010.01.018
|
| 18 |
范浩东,王宗彦,宋灵芝,等.基于NSGA-II算法的并联机器人结构分析及优化[J].机械设计与制造工程,2022,51(3):53-57.
FAN H D, WANG Z Y, SONG L Z, et al. Structural analysis and optimization of parallel robot based on NSGA-Ⅱ algorithm[J]. Machine Design and Manufacturing Engineering, 2022, 51(3): 53-57.
|
| 19 |
王麟,张建军,戚开诚,等.并联机构六维控制器的运动学性能分析及尺度优化[J].机械设计与研究,2020,36(1):75-82. doi:10.13952/j.cnki.jofmdr.2020.0016
WANG L, ZHANG J J, QI K C, et al. Kinematics performance analysis and scale optimization of parallel mechanism six-dimensional controller[J]. Machine Design & Research, 2020, 36(1): 75-82.
doi: 10.13952/j.cnki.jofmdr.2020.0016
|
| 20 |
王晓磊,王雪涛,孙丹丹,等.一种新型轮腿四足机器人腿部机构结构参数优化[J].机电工程,2022,39(4):547-553. doi:10.3969/j.issn.1001-4551.2022.04.018
WANG X L, WANG X T, SUN D D, et al. Optimization of structural parameters of leg mechanism for a new type of wheel legged quadruped robot[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(4): 547-553.
doi: 10.3969/j.issn.1001-4551.2022.04.018
|
| 21 |
李永泉,郭雨,张阳,等.基于牛顿欧拉法的一种空间被动过约束并联机构动力学建模方法[J].机械工程学报,2020,56(11):48-57. doi:10.3901/jme.2020.11.048
LI Y Q, GUO Y, ZHANG Y, et al. Dynamic modeling method of spatial passive over-constrained parallel mechanism based on Newton Euler method[J]. Journal of Mechanical Engineering, 2020, 56(11): 48-57.
doi: 10.3901/jme.2020.11.048
|
| 22 |
朱坚民,李付才,李海伟,等.轮腿式爬楼梯移动机器人的设计及运动特性分析[J].中国机械工程,2013,24(20):2722-2730. doi:10.3969/j.issn.1004-132X.2013.20.005
ZHU J M, LI F C, LI H W, et al. Design and motion analysis of wheel-legged step-climbing mobile robot[J]. China Mechanical Engineering, 2013, 24(20): 2722-2730.
doi: 10.3969/j.issn.1004-132X.2013.20.005
|
| 23 |
刘昌文,徐天舒,李涛,等.基于人车耦合动力学模型的重型卡车平顺性仿真与优化[J].天津大学学报(自然科学与工程技术版),2020,53(7):736-744.
LIU C W, XU T S, LI T, et al. Simulation and optimization of heavy truck ride comfort based on a human-vehicle coupling dynamics model[J]. Journal of Tianjin University (Science and Technology), 2020, 53(7): 736-744.
|
| 24 |
王超星,王殿君,陈亚,等.六轮全地形移动机器人越障性能分析与仿真[J].制造业自动化,2016,38(12):72-77. doi:10.3969/j.issn.1009-0134.2016.12.018
WANG C X, WANG D J, CHEN Y, et al. Obstacle negotiation performance analysis and simulation for six wheel all-terrain mobile robot[J]. Manufacturing Automation, 2016, 38(12): 72-77.
doi: 10.3969/j.issn.1009-0134.2016.12.018
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|