| 机器人与机构设计 |
|


|
|
|
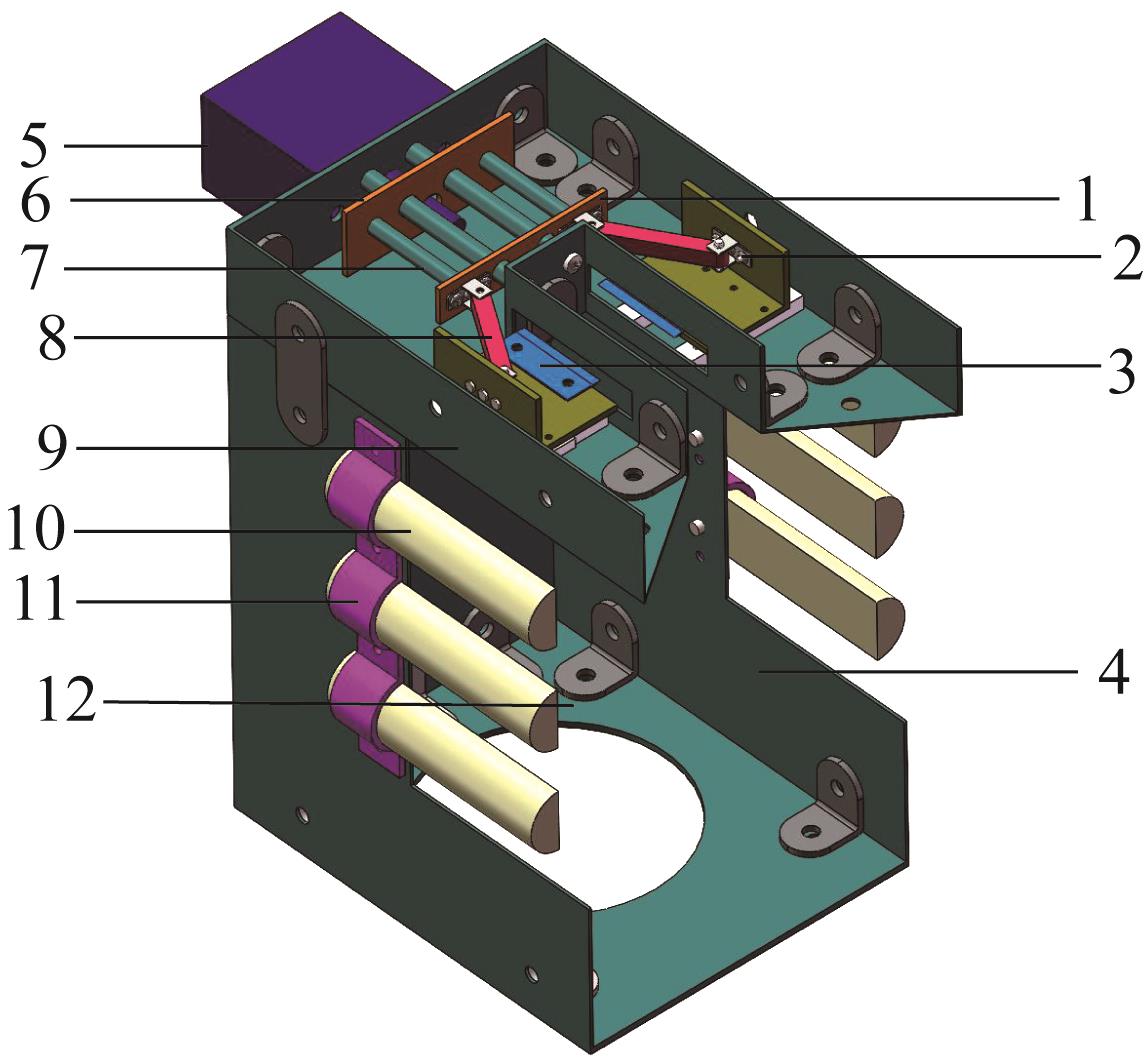
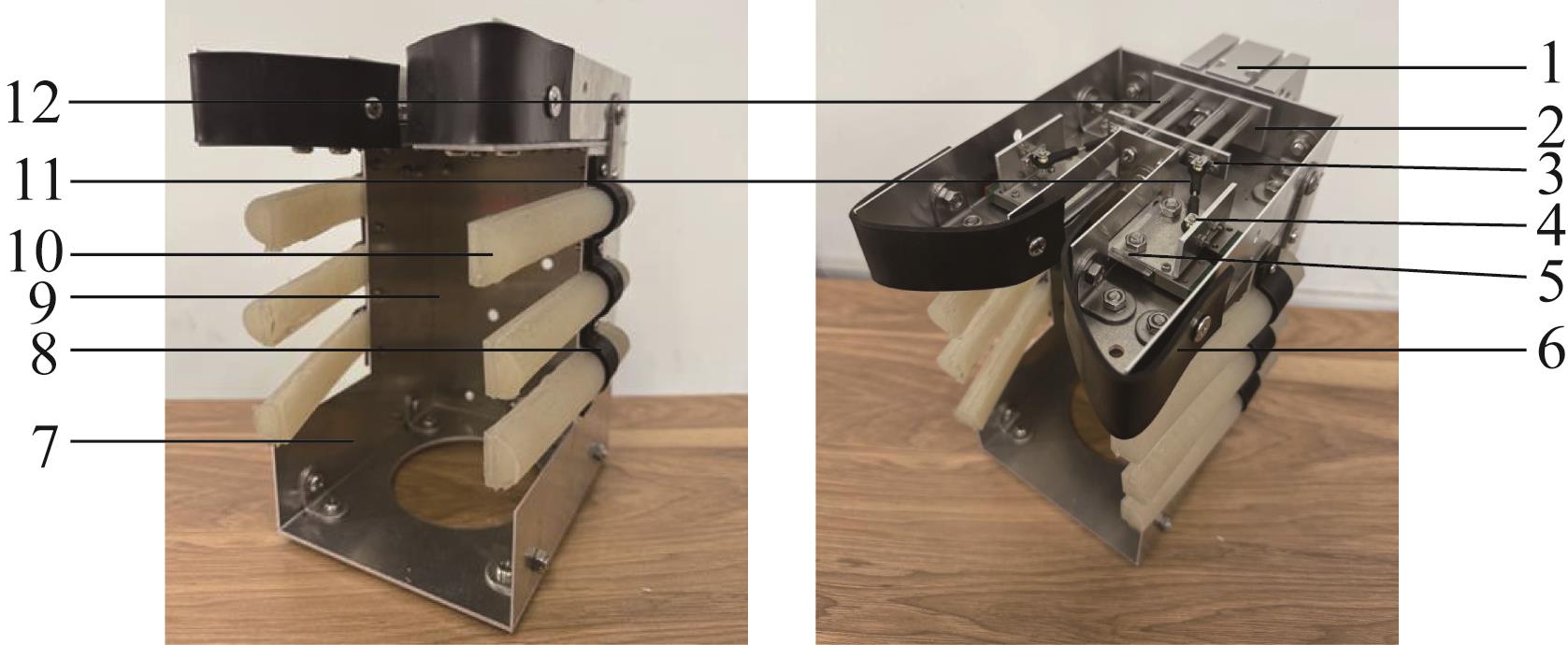
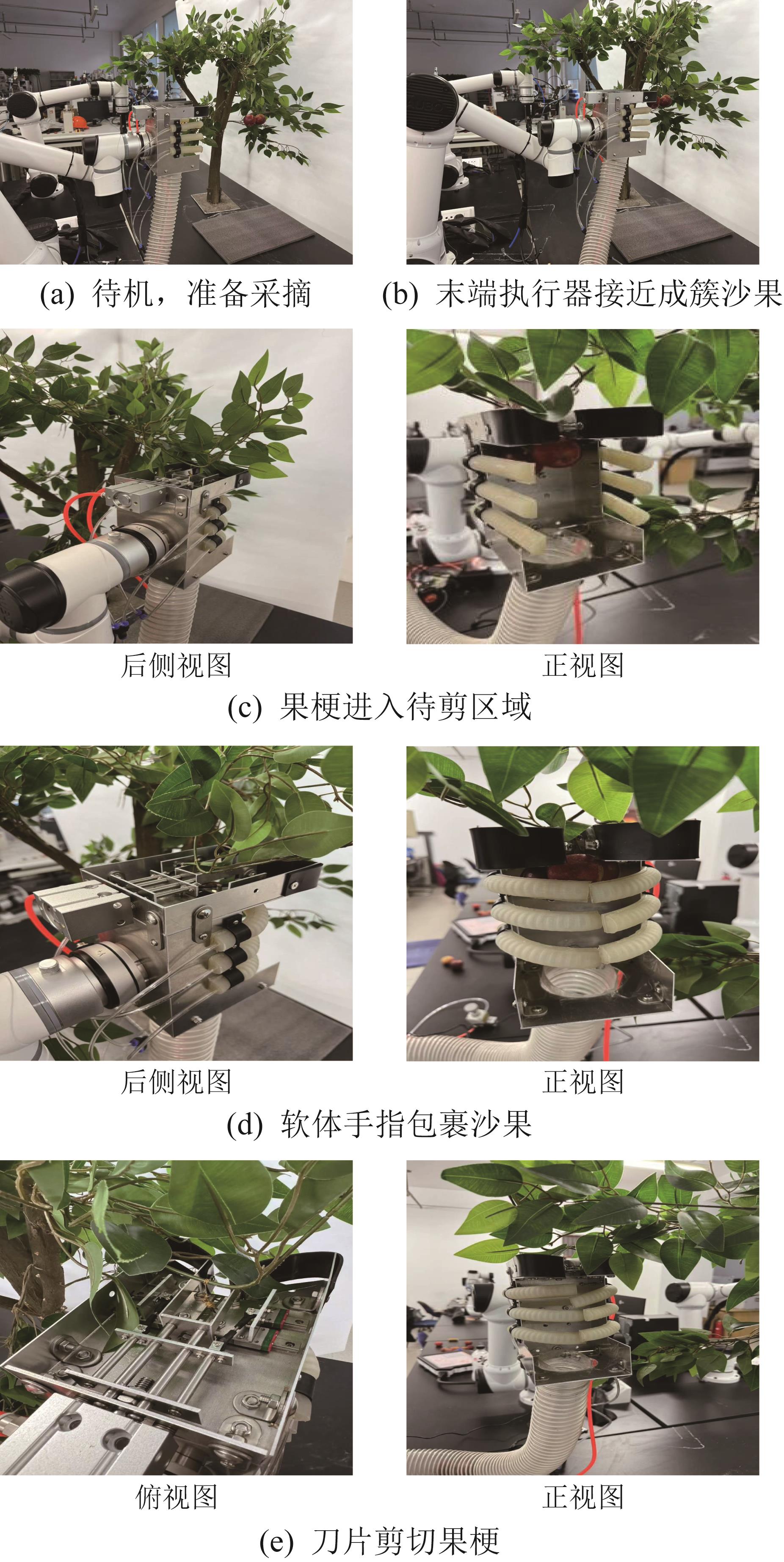
| 成簇沙果采摘末端执行器的设计及实验研究 |
李三平1( ),王琦宇1,吴立国2(),袁龙强1,齐佳美1,孙腾佳1 ),王琦宇1,吴立国2(),袁龙强1,齐佳美1,孙腾佳1 |
1.东北林业大学 机电工程学院,黑龙江 哈尔滨 150040
2.国家林业和草原局 哈尔滨林业机械研究所,黑龙江 哈尔滨 150086 |
|
| Design and experimental study of end-effector for picking clustered crabapple |
| Sanping LI1(),Qiyu WANG1,Liguo WU2(),Longqiang YUAN1,Jiamei QI1,Tengjia SUN1 |
1.School of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China
2.Harbin Forestry Machinery Research Institute, National Forestry and Grassland Administration, Harbin 150086, China |
引用本文:
李三平,王琦宇,吴立国,袁龙强,齐佳美,孙腾佳. 成簇沙果采摘末端执行器的设计及实验研究[J]. 工程设计学报, 2025, 32(1): 51-61.
Sanping LI,Qiyu WANG,Liguo WU,Longqiang YUAN,Jiamei QI,Tengjia SUN. Design and experimental study of end-effector for picking clustered crabapple[J]. Chinese Journal of Engineering Design, 2025, 32(1): 51-61.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.126
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I1/51
|
| 1 |
于斌, 陈娟, 张世鹏, 等. 沙果果酒发酵工艺优化及抗氧化活性的研究[J]. 中国酿造, 2020, 39(1): 142-145. doi:10.11882/j.issn.0254-5071.2020.01.027
YU B, CHEN J, ZHANG S P, et al. Fermentation process optimization and antioxidant property of crab apple wine[J]. China Brewing, 2020, 39(1): 142-145.
doi: 10.11882/j.issn.0254-5071.2020.01.027
|
| 2 |
李华, 赵进红, 张继亮, 等. 不同品种沙果果实品质评价[J]. 林业科技开发, 2012(6): 36-39. doi:10.3969/j.issn.1000-8101.2012.06.010
LI H, ZHAO J H, ZHANG J L, et al. An analysis and evaluation on fruit quality in different varieties of Mulus asiatica Nakai[J]. China Forestry Science and Technology, 2012(6): 36-39.
doi: 10.3969/j.issn.1000-8101.2012.06.010
|
| 3 |
BAETEN J, DONNÉ K, BOEDRIJ S, et al. Autonomous fruit picking machine: a robotic apple harvester[M]//Field and Service Robotics. Berlin, Heidelberg: Springer Berlin Heidelberg, 2008: 531-539.
|
| 4 |
彭艳, 刘勇敢, 杨扬, 等. 软体机械手爪在果蔬采摘中的应用研究进展[J]. 农业工程学报, 2018, 34(9): 11-20. doi:10.11975/j.issn.1002-6819.2018.09.002
PENG Y, LIU Y G, YANG Y, et al. Research progress on application of soft robotic gripper in fruit and vegetable picking[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 11-20.
doi: 10.11975/j.issn.1002-6819.2018.09.002
|
| 5 |
VAN HENTEN E J, VAN TUIJL B A J, HEMMING J, et al. Field test of an autonomous cucumber picking robot[J]. Biosystems Engineering, 2003, 86(3): 305-313.
|
| 6 |
赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15.
ZHAO C J, FAN B B, LI J, et al. Agricultural robots: technology progress, challenges and trends[J]. Smart Agriculture, 2023, 5(4): 1-15.
|
| 7 |
史孝杰, 王树城, 刘惠敏, 等. 林果采摘机器人研究现状与展望[J]. 农业装备与车辆工程, 2024, 62(6): 1-7. doi:10.3969/j.issn.1673-3142.2024.06.001
SHI X J, WANG S C, LIU H M, et al. Current status and prospects of research on forest fruit picking robots[J]. Agricultural Equipment & Vehicle Engineering, 2024, 62(6): 1-7.
doi: 10.3969/j.issn.1673-3142.2024.06.001
|
| 8 |
胡皓若, 张跃跃, 周佳良, 等. 果蔬采摘机器人末端执行器研究现状[J]. 中国农机化学报, 2024, 45(4): 231-236. doi:10.13733/j.jcam.issn.2095-5553.2024.04.033
HU H R, ZHANG Y Y, ZHOU J L, et al. Research status and analysis of end-effector of fruit and vegetable picking robot[J]. Journal of Chinese Agricultural Mechanization, 2024, 45(4): 231-236.
doi: 10.13733/j.jcam.issn.2095-5553.2024.04.033
|
| 9 |
李三平, 孙腾佳, 袁龙强, 等. 气动软体采摘机械手设计及实验研究[J]. 工程设计学报, 2022, 29(6): 684-694. doi:10.3785/j.issn.1006-754X.2022.00.085
LI S P, SUN T J, YUAN L Q, et al. Design and experimental research of pneumatic soft picking manipulator[J]. Chinese Journal of Engineering Design, 2022, 29(6): 684-694.
doi: 10.3785/j.issn.1006-754X.2022.00.085
|
| 10 |
陈燕, 蒋志林, 李嘉威, 等. 夹剪一体的荔枝采摘末端执行器设计与性能试验[J]. 农业机械学报, 2018, 49(1): 35-41.
CHEN Y, JIANG Z L, LI J W, et al. Design and testing of litchi picking end-effector integrated clamping and cutting performance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 35-41.
|
| 11 |
王石榴. 香蕉采摘末端执行器夹持装置设计与试验[D]. 武汉: 华中农业大学, 2022.
WANG S L. Design and experiment of clamping device for banana picking end effector[D]. Wuhan: Huazhong Agricultural University, 2022.
|
| 11 |
Huazhong Agricultural University, 2022.
|
| 12 |
李会宾, 史云. 果园采摘机器人研究综述[J]. 中国农业信息, 2019, 31(6): 1-9.
LI H B, SHI Y. Review on orchard harvesting robots[J]. China Agricultural Informatics, 2019, 31(6): 1-9.
|
| 13 |
陈昕, 华超, 朱银龙, 等. 水果采摘机器人末端执行器的研究进展[J]. 林业机械与木工设备, 2020, 48(9): 4-10. doi:10.3969/j.issn.2095-2953.2020.09.001
CHEN X, HUA C, ZHU Y L, et al. Research progress in fruit picking robot end effectors[J]. Forestry Machinery & Woodworking Equipment, 2020, 48(9): 4-10.
doi: 10.3969/j.issn.2095-2953.2020.09.001
|
| 14 |
张跃跃, 周佳良, 胡皓若, 等. 果蔬采摘末端执行器的研究分析与发展趋势[J]. 林业机械与木工设备, 2022, 50(11): 4-10, 17.
ZHANG Y Y, ZHOU J L, HU H R, et al. Research, analysis and development trend of fruit and vegetable picking end-effector[J]. Forestry Machinery & Woodworking Equipment, 2022, 50(11): 4-10, 17.
|
| 15 |
孙成宇, 闫建伟, 张富贵, 等. 蔬菜采摘机器人及其关键技术研究进展[J]. 中国农机化学报, 2023, 44(11): 63-72.
SUN C Y, YAN J W, ZHANG F G, et al. Research progress of vegetable picking robot and its key technologies[J]. Journal of Chinese Agricultural Mechanization, 2023, 44(11): 63-72.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|