

连续流交叉口通过设置移位左转车道(displaced left-turn, DLT)以消除本向左转和对向直行冲突,在十字路口将信号相位数由4个减少到2个,理论上可提升1倍左右的通行能力[13],是当前研究的热点方向. 连续流交叉口于1995年在美国进行工程应用,在深圳市开展试点应用. 虽然连续流交叉口工程应用实践经验较为成熟,但应用案例主要以对称2路、4路设置移位左转车道为主,且并非所有路口都能取得良好效果,原因在于连续流交叉口实地应用效果与各方向设计方案、交通需求、流量组成、移位左转车道长度、车道划分及信号配时密切相关,现有研究及工程设计指南尚未统筹考虑各项影响因素.
连续流交叉口研究关注较多的为信号配时[14],徐良杰等[15]解析了连续流交叉口主预信号协调控制的复杂关系,基于绿波控制理论构建信号配时优化模型. 考虑到连续流交叉口对道路几何条件要求较高,须结合交叉口实际情况选择移位左转设置类型,4路[13]、对称2路[16]、非对称2路[17]、T型路口[18]、简化版(把相邻交叉口作为子交叉口)[19]等移位左转设置已有研究. Zhao等[20]进一步将连续流交叉口与平行流交叉口进行组合设置,以扩展连续流交叉口应用场景. 为降低左转和右转车流对连续流交叉口交通运行的影响,部分学者对已有移位左转设计样式微改进,提出各种特殊车道移位左转设计样式[13,15,16,20,21]. 部分学者对连续流交叉口行人过街[22]、非机动车通行[23-24]、交通安全[25-26]等方面开展研究.
综上所述,关于连续流交叉口设计及控制的相关研究已较为成熟,但主要集中在对称2路、4路等设计方案,相关研究的控制思路及建模方法须在车道分配、移位左转车道、右转专用道、常规右转驶出车道、常规驶出车道(供右转和左转使用)等几何布局及信号相位相序方案确定的前提下进行应用,故只适用于关注的特定研究对象[27]. 受道路几何条件限制和交通组成等影响,须根据交叉口实际情况选择单路、非对称2路、对称2路、3路、4路等移位左转设置类型,同时为避免右转或左转车流交通量及比例过高,影响交叉口通行效率,须考虑是否采用设置有各种特殊类型驶入、驶出车道的移位左转设计样式.
基于车道控制方法[28],将2 401种设计方案整合到统一优化框架中,提出一种连续流交叉口几何设计与信号配时协同优化方法. 以十字路口为研究对象,构建集设计方案选择、移位左转设计样式、车道分配及信号配时协同优化模型,结合实际工程道路环境特点灵活选择交叉口设计方案,克服移位左转改造单一设计方案对比论证不充分所导致的弊端,即落地应用不合理,可能降低通行效率.
1. 几何设计
常规交叉口(conventional intersection, CI)各个路段采用的设计方案,即常规设计,如图1所示,在各个路段上涉及6种车流.移位左转设计如图2所示. 将左转驶入车道偏移到驶出车道左侧(以预信号交叉口(pre-signal intersection, PI)往主信号交叉口(main-signal intersection, MI)方向为准),称为移位左转车道,相应的驶出车道也会有一定程度偏移,称为移位驶出车道. 若右转驶入和直行驶入共用车道,称为直右车道,也可设置右转专用道. 在移位左转车道左侧,可选择设置常规驶出车道或常规右转驶出车道. 常规右转驶出车道仅允许右转驶出车流使用,左转驶出车流选择移位驶出车道行驶;常规驶出车道供右转驶出和左转驶出车流共用,左转驶出车流不再选择移位驶出车道行驶;若不设置常规驶出车道和常规右转驶出车道,则右转驶出和左转驶出车流均选择移位驶出车道行驶. MI及4个路段上的PI均属于连续流交叉口的一部分,将其称为子交叉口. MI与PI之间的所有车道均划分为移位调整区(即区域1),PI另一侧则为区域2.
图 1
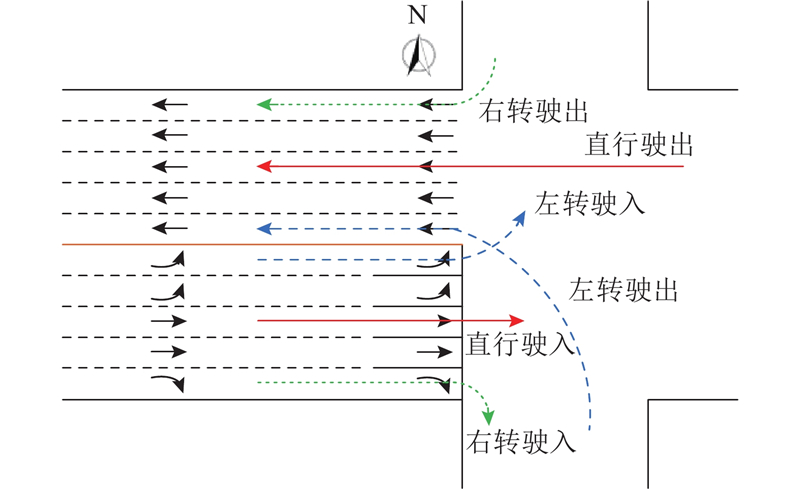
图 1 常规设计及6种车流示意图
Fig.1 Schematic diagrams of conventional design and six traffic flow
图 2
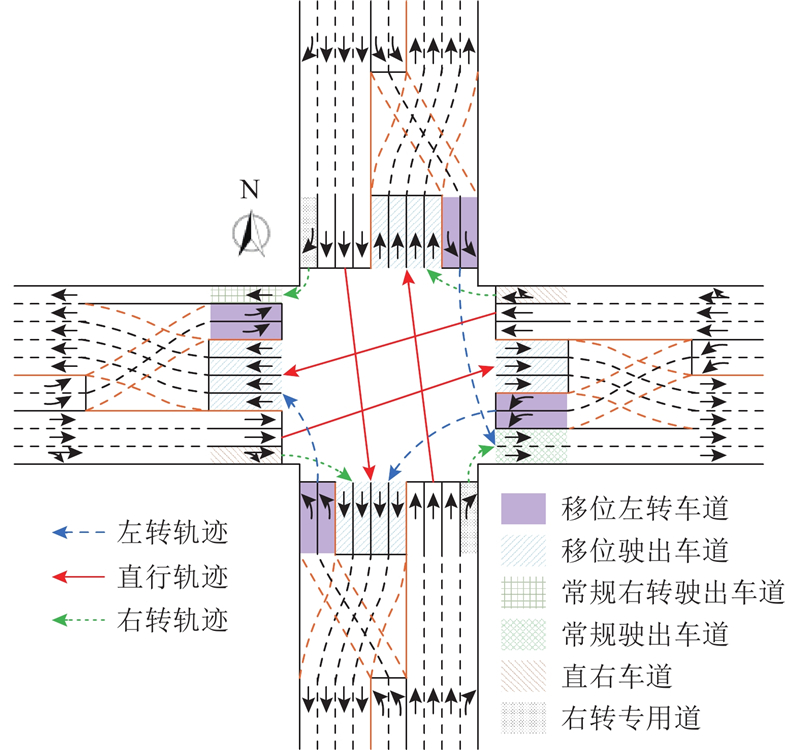
图 2 移位左转不同设计样式示意图
Fig.2 Schematic diagram of different design styles for displaced left-turn
2. 模型构建
2.1. 建模前提条件
路段、流向、车道及设计方案编号如图3所示. 其中,
图 3
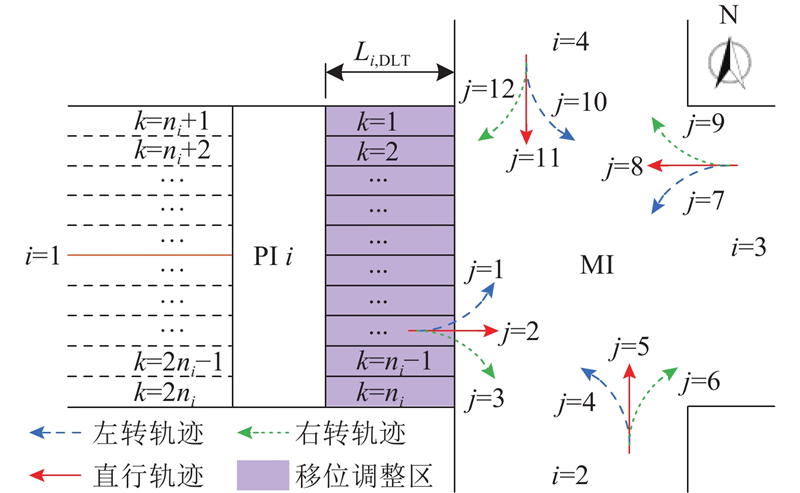
图 3 连续流交叉口优化模型构建索引参数解释
Fig.3 Construction of index parameter interpretation for continuous flow intersections optimization model
2.2. 目标函数
式中:
2.3. 约束条件
2.3.1. 车道划分
各路段仅可采用常规设计或移位左转设计中1种设计方案,见式(2). 常规驶出车道仅可应用在移位左转设计中,且设置常规驶出车道必设置常规右转驶出车道,见式(3). 若移位左转设计中设置右转专用道,则须设置相应的常规右转驶出车道,以保证右转车辆红灯通行,见式(4).
式中:
对于
式中:
对于
式中:
MI处:各流向接近车道数不大于接收车道数,见式(27)~(29). 在移位左转设计中:若采用常规驶出车道设计,且未设置右转专用道,导致左转驶出和右转驶出需同时使用常规驶出车道,故两者接近车道数之和不大于常规驶出车道数,见式(30);同样,若未采用常规驶出车道设计和常规右转驶出车道设计,将导致左转驶出和右转驶出同时使用移位驶出车道,故两者接近车道数之和不大于移位驶出车道数,见式(31);为避免分配过多的车道作为常规右转驶出车道,增加约束式(32).
2.3.2. 主信号控制
信号配时变量应在合理的范围内,见式(33)~(35). 车道信号与相位信号存在约束关系,见式(36)、(37).
式中:
在常规交叉口中,若不设置直左共用车道,便不会存在左转与直行分流冲突. 一般情况下,常规交叉口接收车道数小于接近车道数之和,所以合流点存在交通冲突,故不会将两者同相位放行. 而右转与直行之间的分流点和合流点,若设置有右转专用道,便不考虑分流冲突和合流冲突;若设置有直右共用车道,则右转放行相位保持与直行放行相位一致. 所以,本研究在MI处主要关注左转、直行及两者之间的16个交织点和4个合流点,故常规交叉口交通冲突矩阵见式(38). 式(38)矩阵行、列均表示流向
式中:
若某路段采用移位左转设计,则可消除本向左转和对向直行冲突;若某路段采用移位左转设计,且不设置常规驶出车道,则可消除本向左转和相交方向左转冲突.
式中:
修正后交通冲突矩阵为
式中:
为避免冲突车流同相位放行,须满足如下约束条件,以确保相位方案的可行.
式中:
若未设置右转专用道,则右转驶入相位与直行驶入相位相同,见式(44)、(45). 若设置右转专用道,则右转绿灯时长等于1,见式(46).
2.3.3. 预信号控制
绿灯时长、绿灯启亮时刻应在合理的范围内,见式(47)、(48). 在常规设计中,所有流向绿灯时长等于1,见式(49). 在移位左转设计中:直行驶入和右转驶入绿灯时长等于1,见式(50);左转驶入和直行驶出信号相位关系见式(51)、(52);左转驶出、右转驶出与直行驶出的信号相位关系,若不设置常规驶出车道和常规右转驶出车道,则左转驶出、右转驶出与直行驶出共用移位驶出车道,故与直行驶出信号相位相同,若设置常规右转驶出车道,则右转驶出选择常规右转驶出车道行驶其绿灯时长等于1,左转驶出与直行驶出共用移位驶出车道,故与直行驶出信号相位相同,若设置常规驶出车道,则左转驶出、右转驶出均选择常规驶出车道行驶其绿灯时长等于1,见式(53)~(58). 车道信号与相位信号存在约束关系,见式(59)~(62).
式中:
2.3.4. 主预信号协调
为便于统一建模,上述主预信号相位设计中各流向均会遇到3次信号灯,但部分信号灯放行相位绿灯时长为1,即等于周期时长,并不会对交叉口信号配时和车道分配造成影响,在实际工程中也不需要安装设置,同样不会对主预信号协调造成影响,参考已有主预信号协调控制思想[17,20],各流向主预信号协调及相关参数解释如图4所示. 考虑绿波带宽有最小值约束,引入0-1变量
图 4
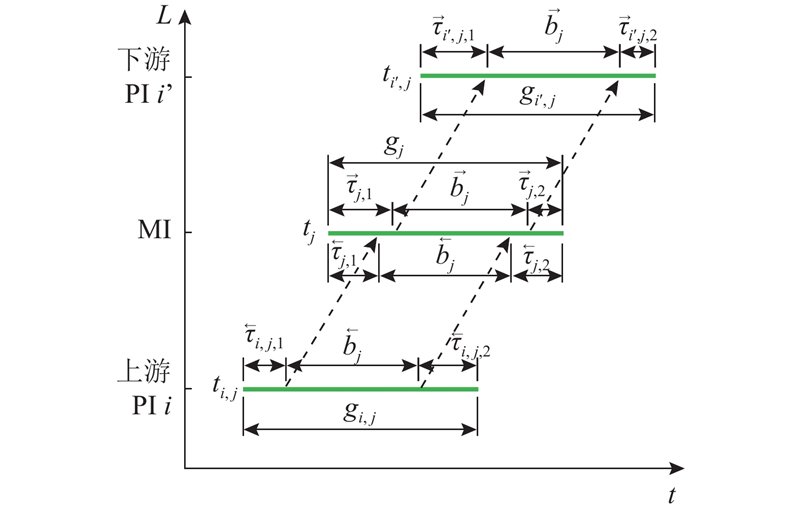
图 4 连续流交叉口绿波传递示意图
Fig.4 Schematic diagram of green wave transmission at continuous flow intersections
式中:
2.3.5. 流量分配
各车道允许行驶车流与相应流量的关系见式(76). 共用流量系数不大于各流向在各子交叉口流量系数,见式(77)、(78). 车道流量与交通需求关系见式(79)~(81). 各车道流量不大于通行能力,若多股车流共用车道,则各流向的车道流量之和不大于通行能力,见式(82)~(88). 在移位左转设计中,各流向在前一个子交叉口处的通行能力不大于在后一个子交叉口处的通行能力,见式(89)~(92).
式中:
在移位左转设计中,要避免移位调整区车道上的车辆排队溢出,同时为使所构建的约束条件依然为线性约束,引入式(93)~(97). 移位调整区车道上车辆排队长度约束见式(98)~(101),若多股车流共用车道,则各流向排队长度之和不大于移位调整区车道长度.
式中:
2.4. 模型讨论
在所构建模型中,决策变量包括设计方案选择
3. 案例分析
3.1. 数值实验
令各路段到来整个进口道流量分别为左转600 pcu/h、直行1 000 pcu/h、右转200 pcu/h,遍历2 401种设计方案,在各种设计方案下,采用本研究优化模型进行求解. 参数取值为:权重系数106、103、1,路段车道总数10,极大常数106,周期时长最小值60 s、最大值120 s,绿灯时长最小值10 s,绿灯间隔时间4 s,绿波带宽最小值10 s,移位调整区长度100 m,车道宽度3.5 m,PI长度40 m,各路段总车道数10条,行驶速度30 km/h,车道饱和流率1 500 pcu/h,停车排队车头间距7 m/pcu.
将各种设计方案优化求解结果中共用流量系数
图 5
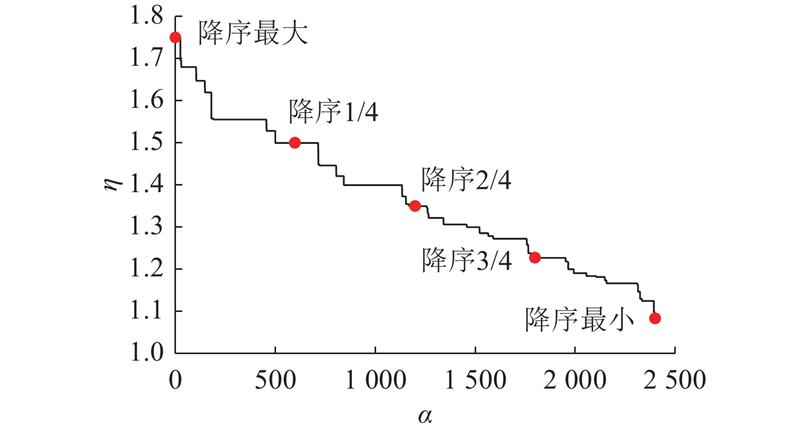
图 5 共用流量系数降序排序变化
Fig.5 Ranking variation of common flow coefficient in descending order
选取降序最大(降序序号1)、降序1/4(降序序号600)、降序2/4(降序序号1 200)、降序3/4(降序序号1 800)、降序最小(降序序号2 401)的设计方案进行对比分析. 如表1所示. 其中,
表 1 数值实验评价指标对比
Tab.1
| 降序最大 | 1.75 | 61.54 | 7 196 | 32.25 | −24.51 |
| 降序1/4 | 1.5 | 38.46 | 7 200 | 31.97 | −25.16 |
| 降序2/4 | 1.35 | 24.62 | 7 197 | 33.82 | −20.83 |
| 降序3/4 | 1.23 | 13.29 | 7 198 | 37.32 | −12.64 |
| 降序最小 | 1.08 | — | 7 192 | 42.72 | — |
3.2. 案例分析
图 6
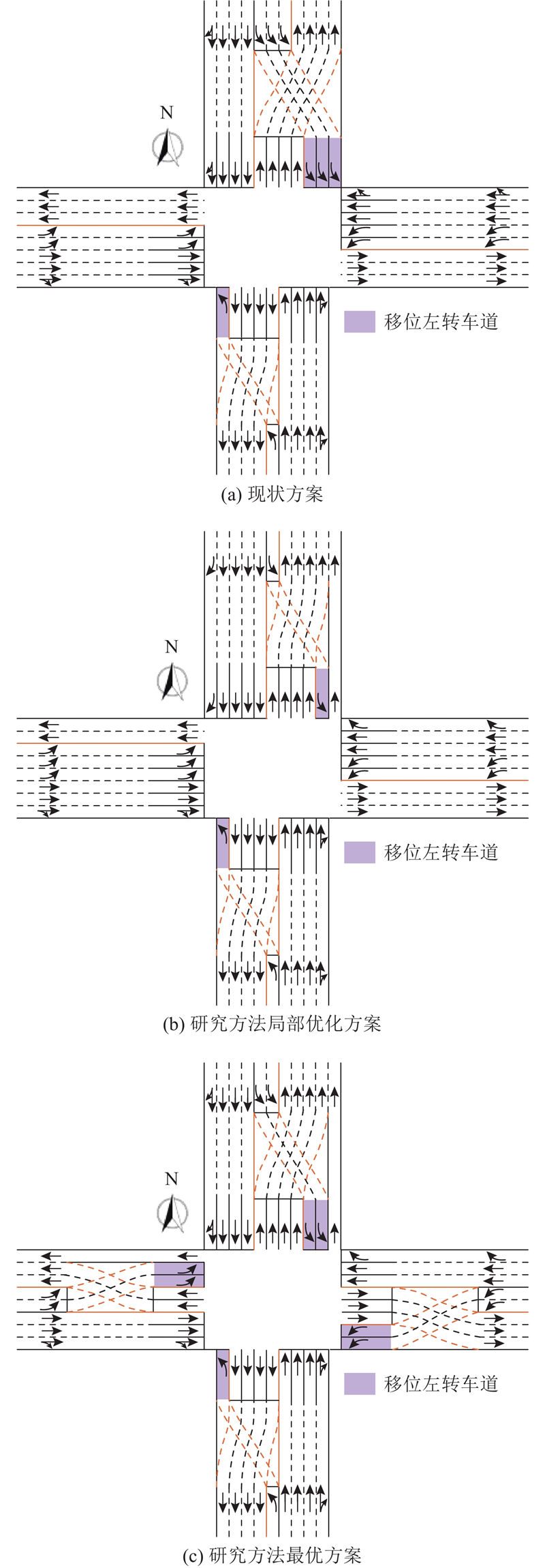
表 2 深圳彩田路-福华路各方向各流向交通流量
Tab.2
| 流向 | 交通流量/(pcu·h−1) | |||
| 西向 | 南向 | 东向 | 北向 | |
| 左转 | 564 | 69 | 441 | 297 |
| 直行 | 498 | 1 412 | 388 | 1 326 |
| 右转 | 148 | 172 | 293 | 125 |
表 3 实际案例评价指标对比
Tab.3
| 类型 | 负荷度 | 服务 水平 | |||
| 取值 | 相对比例/% | ||||
| 研究方法 | 最优方案 | 2.04 | 46.89 | 0.49 | 1级 |
| 局部优化方案 | 1.62 | 16.73 | 0.62 | 2级 | |
| 现状方案 | 1.39 | — | 0.72 | 2级 | |
由表3可知,局部优化方案虽然与现状方案均采用对称2路移位左转设置,但局部优化方案通过右转专用道设计、常规右转驶出车道设计以及各流向车道数最佳匹配等手段,进一步提升交叉口通行能力,由此证实所提方法的可行性. 根据《城市道路工程设计规范》(CJJ 37—2012)采用负荷度作为交叉口服务水平划分标准,最优方案属于1级,而现状方案属于2级. 此外,最优方案相对于现状方案能提升46.89%的通行能力,通行效益更为显著.
4. 敏感性分析
如表4所示,设计5种实验分析左转比例、右转比例、流量倍数对连续流交叉口通行能力影响,令各路段到来整个进口道总流量为1 800 pcu/h,其余输入参数与3节相同. u1为左转比例,u2为右转比例,e为流量倍数. 流量倍数是指2个路段到来流量的比值,例如3向流量倍数为西、南、东与北路到来流量比值,即西、南、东路到来流量相同,同时西与北路到来流量比值在1~2之间,故西、南、东路为大流量路段.
表 4 敏感性分析对比实验设计
Tab.4
| 序号 | X 轴 | Y 轴 | Z 轴 | 各路段流量关系 |
| 1 | 左转比例10%~40% | 右转比例10%~30% | 共用流量系数相对误差比例(以常规交叉口为基准) | 西、南、东、北 相同 |
| 2 | 3路流量倍数(西、南、东与北比值)1~2 | 西、南、东相同 | ||
| 3 | 对称2路流量倍数(西、东与南、北比值)1~2 | 西、东相同, 南、北相同 | ||
| 4 | 非对称2路流量倍数(西、南与东、北比值)1~2 | 西、南相同, 东、北相同 | ||
| 5 | 单路流量倍数(西与南、东、北比值)1~2 | 南、东、北相同 |
各种类型连续流交叉口相对于常规交叉口通行能力增加比例随交通组成中左转比例、右转比例的变化关系,如图7所示. 4路移位左转设置通行能力增加幅度最优,最大值能达到61.54%,说明在4路对称流量场景中,采用4路移位左转设置对交叉口运行性能的改善最佳. 当右转比例较大时,各种类型连续流交叉口普遍存在通行能力增加比例有所下降的情况. 连续流交叉口通行能力增加比例在某些特定左转比例取值附近表现较优,原因是车道数分配与交通组成相匹配,使得左转和直行尽量皆为临界车流,以最大化利用道路通行资源.
图 7
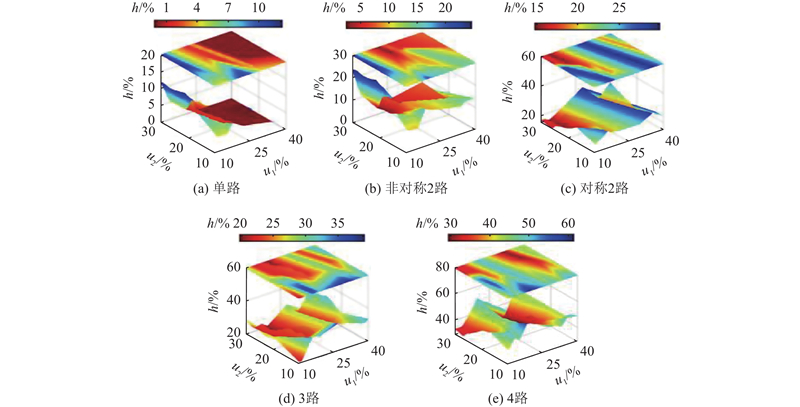
图 7 交通组成与通行能力相对误差比例关系
Fig.7 Proportional relationship between traffic composition and capacity relative error
与常规交叉口相比,连续流交叉口通行能力增加比例随3路、对称2路、非对称2路、单路流量倍数的变化趋势,如图8~图11所示. 整体来看,单路、非对称2路、对称2路、3路、4路移位左转设置通行能力增加比例约为5%、10%、25%、35%、50%,最大值能达到60.88%,即随着移位左转车道设置路段增加,连续流交叉口通行能力增加比例就越大,且对称设置优于非对称设置. 4路移位左转设置在流量倍数低时运行性能表现更优,由此可知,4路设置最佳应用场景为各个路段到来流量差距不大的交叉口. 3路移位左转设置通行能力增加比例变化与流量倍数变化类型、左转比例密切相关. 若采用对称2路移位左转设置,当3路、对称2路流量倍数变化,对称2路设置在流量倍数较大时表现较好,原因是此时移位左转车道主要设置在2个大流量路段上,进而提升了交叉口通行能力;当非对称2路、单路流量倍数变化,对称2路设置在流量倍数较小时表现较好,即对称2路设置适用于对称流量场景中. 相对于3路、对称2路流量倍数变化,非对称2路移位左转设置在非对称2路、单路流量倍数变化中表现要略优,考虑到非对称2路设置对交叉口通行能力增加幅度有限,一般情况不建议采用非对称2路设置,受道路几何条件限制只能采用非对称2路设置时,尽量选择非对称2路、单路流量倍数变化场景. 单路移位左转设置通行能力增加比例较小,不宜采用.
图 8
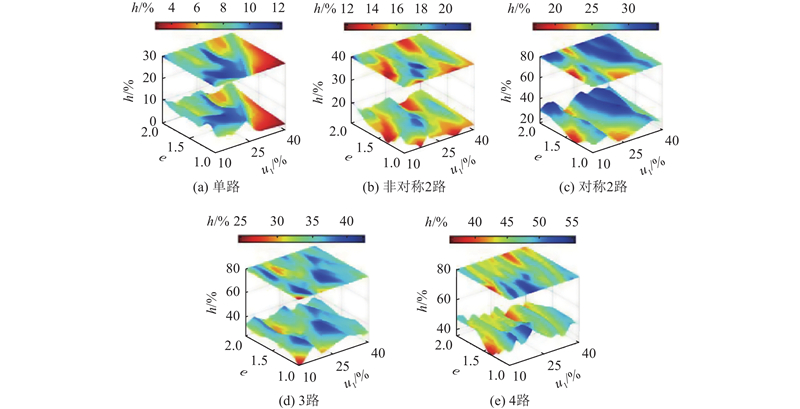
图 8 3路流量倍数与通行能力相对误差比例关系
Fig.8 Proportional relationship between the multiple of three-way flow and the relative error of traffic capacity
图 9
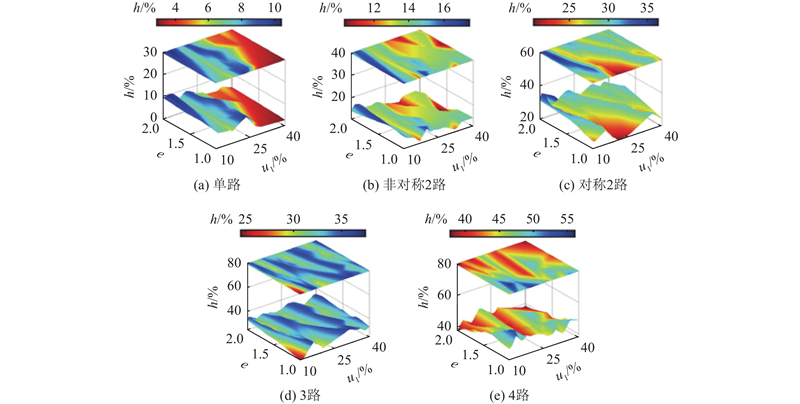
图 9 对称2路流量倍数与通行能力相对误差比例关系
Fig.9 Proportional relationship between the multiple of symmetric two-way flow and the relative error of traffic capacity
图 10
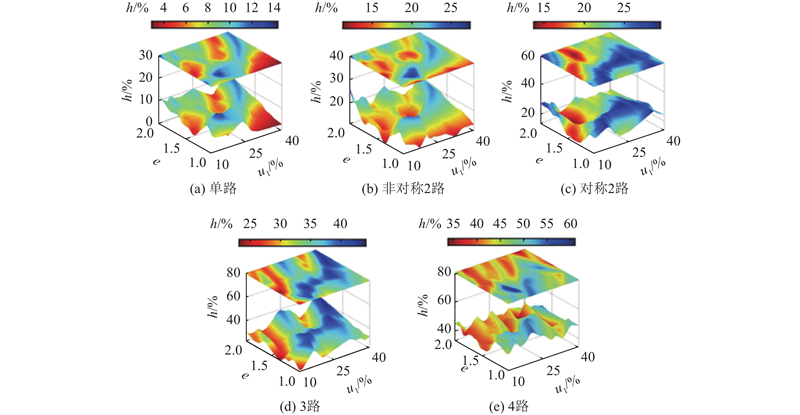
图 10 非对称2路流量倍数与通行能力相对误差比例关系
Fig.10 Proportional relationship between the multiple of asymmetric two-way flow and the relative error of traffic capacity
图 11
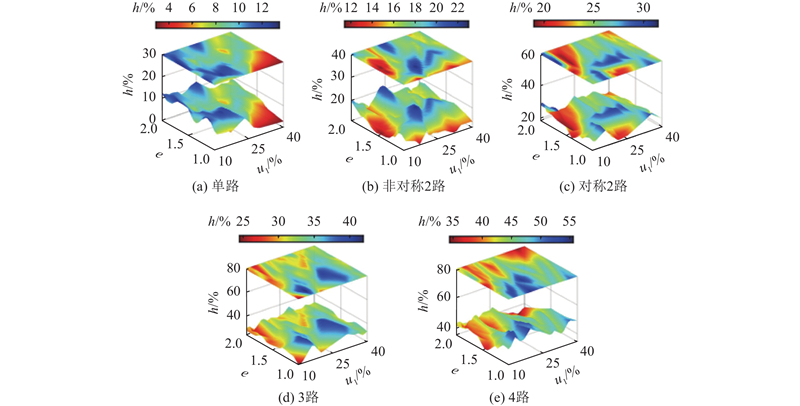
图 11 单路流量倍数与通行能力相对误差比例关系
Fig.11 Proportional relationship between the multiple of one-way flow and the relative error of traffic capacity
5. 结 论
(1)分析单路、非对称2路、对称2路、3路、4路移位左转设置及常规交叉口,与是否采用右转专用道、常规右转驶出车道、常规驶出车道设置等相组合形成的2 401种设计方案的运行特征,通过优化模型自动生成各种设计方案最优信号相位相序方案,提出了1种几何设计和信号配时协同优化方法,最大限度利用交叉口道路通行资源.
(2)分析所有设计方案通行能力降序排序变化曲线,通行能力最大值与最小值相对误差比例达到61.54%,故选择合适的设计方案对交叉口通行能力增加作用显著.
(3)分析左转比例、右转比例和流量倍数对连续流交叉口运行性能的影响,与常规交叉口相比,单路、非对称2路、对称2路、3路、4路移位左转设置约能增加5%、10%、25%、35%、50%的通行能力. 交叉口采用移位左转设计的路段越多,其通行能力也就越大,且对称2路移位左转设置的通行能力高于非对称2路移位左转设置.
(4)为便于线性模型构建,选择储备通行能力(共用流量系数)最大化作为优化目标,后续可考虑延误、排队长度、碳排放及安全等指标.
参考文献
设置借道左转车道的排阵式交叉口组合设计方法
[J].DOI:10.19818/j.cnki.1671-1637.2025.01.021 [本文引用: 1]
Combination design method of tandem intersections with contraflow left-turn lane
[J].DOI:10.19818/j.cnki.1671-1637.2025.01.021 [本文引用: 1]
Restricted crossing U-turn traffic control by interval type-2 fuzzy logic
[J].DOI:10.1016/j.eswa.2022.118613 [本文引用: 1]
Geometric and operational optimization at reversible unconventional arterial intersection reducing traffic emissions
[J].DOI:10.1016/j.trd.2025.104656 [本文引用: 1]
Stationary condition based performance analysis of the contraflow left-turn lane design considering the influence of the upstream intersection
[J].DOI:10.1016/j.trc.2020.102919 [本文引用: 1]
Traffic simulation of continuous flow intersection with displaced left-turn: a case study
[J].DOI:10.1186/s44147-021-00055-3 [本文引用: 1]
Continuous flow intersection performance measures using connected vehicle data
[J].DOI:10.4236/jtts.2022.124047 [本文引用: 1]
Operational and safety performance evaluation of parallel flow intersection
[J].DOI:10.1177/03611981211070283 [本文引用: 1]
Performance analysis of parallel flow intersection and displaced left-turn intersection designs
[J].
Unconventional USC intersection corridors: evaluation of potential implementation in Doha, Qatar
[J].
Pedestrian crossing design and analysis for symmetric intersections: Efficiency and safety
[J].DOI:10.1016/j.tra.2020.10.012 [本文引用: 1]
自动车轨迹优化以实现分转向车流串联交叉口控制
[J].
Trajectory optimization of connected and autonomous vehicles to achieve tandem intersection control
[J].
An integrated intersection design for promoting bus and car traffic
[J].DOI:10.1016/j.trc.2021.103211 [本文引用: 1]
全设置连续流交叉口信号配时及延误模型
[J].DOI:10.3969/j.issn.1001-7372.2022.05.019 [本文引用: 3]
Signal timing and delay model for full continuous flow intersections
[J].DOI:10.3969/j.issn.1001-7372.2022.05.019 [本文引用: 3]
Development of planning-stage models for analyzing continuous flow intersections
[J].DOI:10.1061/(ASCE)TE.1943-5436.0000596 [本文引用: 1]
考虑绿波控制的双相位移位左转交叉口效用分析
[J].DOI:10.3969/j.issn.1001-0505.2021.05.020 [本文引用: 2]
Utility analysis of dual phase displaced left-turn intersection considering green wave control
[J].DOI:10.3969/j.issn.1001-0505.2021.05.020 [本文引用: 2]
连续流交叉口信号协调配时及延误模型
[J].DOI:10.16097/j.cnki.1009-6744.2021.03.007 [本文引用: 2]
Signal coordination timing and delay model for continuous flow intersection
[J].DOI:10.16097/j.cnki.1009-6744.2021.03.007 [本文引用: 2]
Development of signal optimization models for asymmetric two-leg continuous flow intersections
[J].DOI:10.1016/j.trc.2016.11.021 [本文引用: 3]
T型交叉口移位左转几何设计及信号配时优化
[J].DOI:10.13607/j.cnki.gljt.2022.06.023 [本文引用: 1]
Geometric design and signal timing optimization of displaced left-turn at T-shaped intersection
[J].DOI:10.13607/j.cnki.gljt.2022.06.023 [本文引用: 1]
A continuous-flow-intersection-lite design and traffic control for oversaturated bottleneck intersections
[J].DOI:10.1016/j.trc.2015.03.011 [本文引用: 1]
Optimal operation of displaced left-turn intersections: a lane-based approach
[J].DOI:10.1016/j.trc.2015.10.012 [本文引用: 4]
Signal control method and performance evaluation of an improved displaced left-turn intersection design in unsaturated traffic conditions
[J].DOI:10.1080/21680566.2020.1764410 [本文引用: 1]
Pedestrian delay model for continuous flow intersections under three design patterns
[J].DOI:10.1155/2019/1016261 [本文引用: 1]
连续流交叉口左转非机动车交通组织创新设计
[J].DOI:10.16097/j.cnki.1009-6744.2022.01.024 [本文引用: 1]
Innovative design of transportation organization for left-turn non-motor vehicles at continuous flow intersection
[J].DOI:10.16097/j.cnki.1009-6744.2022.01.024 [本文引用: 1]
An innovative design for left turn bicycles at continuous flow intersections
[J].DOI:10.1080/21680566.2019.1614496 [本文引用: 1]
Development of crash modification factors for continuous flow intersections
[J].DOI:10.31075/PIS.64.03.01 [本文引用: 1]
一种改进的移位左转车道信号控制方法及其效用分析
[J].DOI:10.19721/j.cnki.1001-7372.2019.09.015 [本文引用: 1]
Signal control and utility analysis of an improved displaced left-turn lane
[J].DOI:10.19721/j.cnki.1001-7372.2019.09.015 [本文引用: 1]
Real-time estimation of lane-based queue lengths at isolated signalized junctions
[J].DOI:10.1016/j.trc.2015.03.019 [本文引用: 1]
连续流交叉口左转非机动车优化设计方法
[J].DOI:10.16097/j.cnki.1009-6744.2018.06.025 [本文引用: 1]
Optimization design method of left-turn bicycles crossing for continuous flow intersections
[J].DOI:10.16097/j.cnki.1009-6744.2018.06.025 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}