

协调各移相比间的关系是优化系统效率的关键. 现有的控制策略可以分为数值解与解析解2类. Krismer等[7]通过闭式解析推导,建立最优控制参数模型. Li等[8]提出五变量调制策略,结合粒子群优化算法实现全功率范围最优工作点的追踪. 上述方法通常依赖离线优化与查找表,当系统参数变化时须重新计算. Tong等[9]构建全局最优条件方程,实现最小均方根电流控制. Shi等[10]提出多移相开关面的最小电流应力边界控制. Hou等[11]基于拉格朗日乘数法,获得最优解. 龚邻骁等[12]对DAB的最优模态及优化目标进行定量分析,提出移相策略. 该策略能够有效优化电感电流,并实现宽范围软开关. Yan等[13]在电流应力优化的基础上考虑可变直流侧电压,利用Karush–Kuhn Tucker (KKT)条件法推导解析解的表达式. 上述解析解方法通过建立连续的解析关系,显著降低了计算复杂度,增强了参数鲁棒性.
DPS在显著提升DAB变换器的功率控制灵活性和效率的同时,增加了控制复杂度. 现有的策略通常采用比例积分(proportional integral,PI)控制进行慢调节,以避免功率过渡振荡,导致系统的动态响应受限,且在宽范围运行条件下参数整定较困难. Sha等[14]基于脉冲序列控制提出离散扩展相移控制方法,无需误差放大器与补偿电路,动态响应快. Shao等[15]分析虚拟直接功率控制[16-17]、扰动观测控制[18]、滑模控制[19-20]及移动离散控制集模型预测控制(moving discrete control set model predictive control, MDCS-MPC)[21-24]等先进策略. 前3种方法虽然能够改善参数敏感性问题并提升动态响应,但存在抗负载扰动能力受限的固有缺陷. MDCS-MPC通过将移相比离散化以适应数字控制,在降低电流传感带宽要求方面展现出显著优势. 上述控制策略均未解决电流应力优化(current-stress-optimized, CSO)的问题.
本文研究兼顾DAB变换器CSO及动态响应优化,结合CSO-DPS与模型预测控制(model predictive control, MPC)理论,提出自适应离散控制集模型预测控制(adaptive discrete control set model predictive control, ADCS-MPC)调制策略. 通过引入桥内移相比提高控制自由度,基于KKT条件法推导DPS最佳移相比关系,将多移相比简化为单自由度,实现与MPC的高效适配. 离散化相移生成自适应控制集,建立DAB电压预测模型. 利用代价函数滚动优化求出最佳相移,根据最优移相比关系解与最佳相移的关系,推导最优移相比,降低电流应力. 在保证输出电压稳定的同时,显著降低变换器电流应力,提升动态响应能力.
1. CSO-DPS控制原理
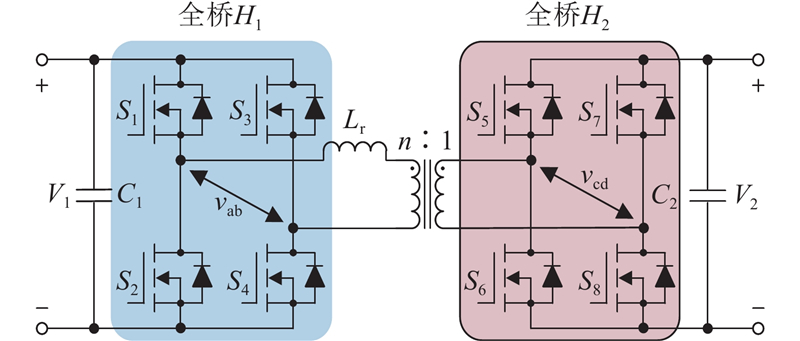
DAB变换器的结构如图1所示,由高频变压器、电感以及2个全桥
图 1
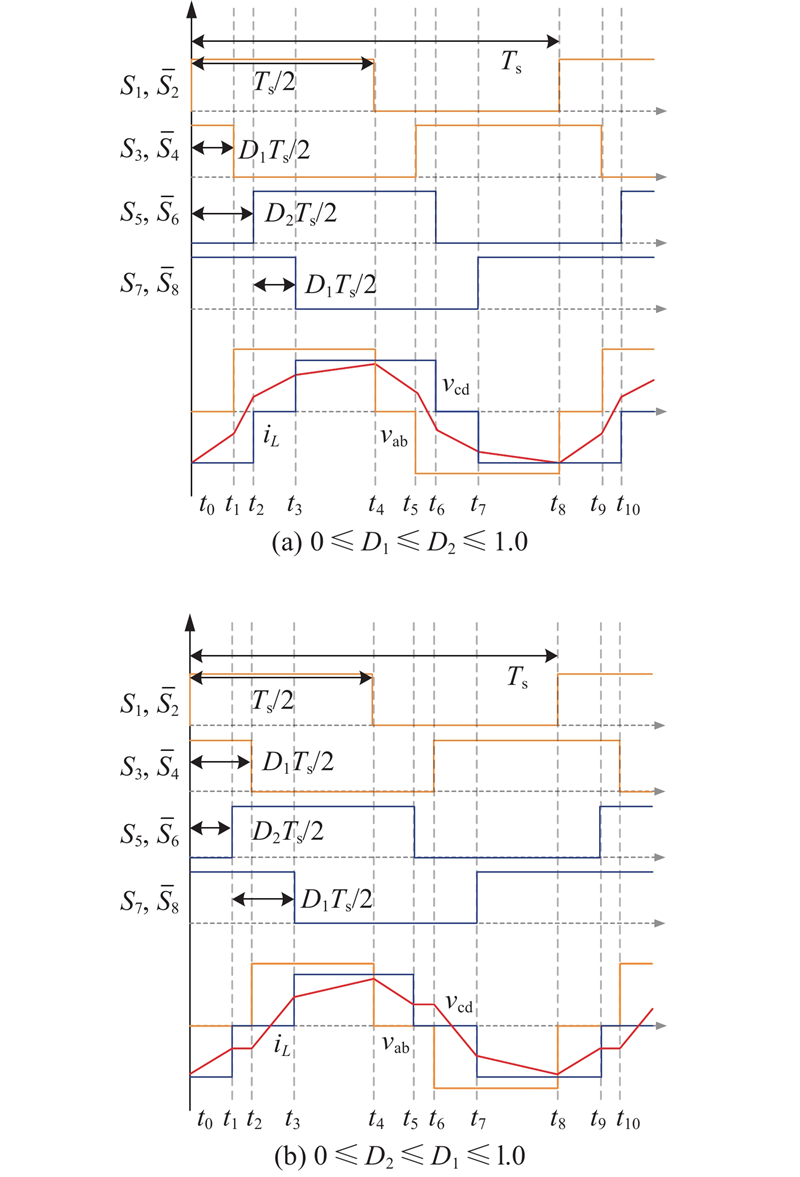
DAB变换器应用DPS调制策略,开关序列、电感电流和变压器两端电压波形如图2所示. 其中,
图 2
采用拉格朗日乘数法,构建以电流应力最小化为目标的优化模型,求解得到最佳移相比的解析关系[11]. 此优化过程须满足功率传输约束条件. 系统传输功率可以表示为
式中:
结合式(2)和图2(a),可以得到模式1中前半周期内各时间段的电感电流表达式如下:
各时间段可以由移相比和开关周期表示:
根据电感电流的对称性可得,
表 1 半周期内各时刻的电感电流
Tab.1
| 模式 | 电感电流 |
| 模式1 | |
| 模式2 |
从图2可以看出,2种模式下的电感电流峰值均出现在
式中:
式中:
电流应力优化问题可以描述为
式中:
利用KKT条件法,可以求解电流应力优化的最佳移相比关系解. 该方法的表达式如下:
式中:
以模式1为例,式(8)可以详细表述为
利用式(9)可得最优移相比之间的关系,即
结合式(10)、(6)中模式1的功率表达式,可以得到模式1的最优解析解为
同理可得,模式2的最优解析解为
将式(11)、(12)分别代入式(5),得到电流应力的表达式为
统一控制变量,可以减少算法控制复杂程度和计算负担. 取变压器端电压
图 3
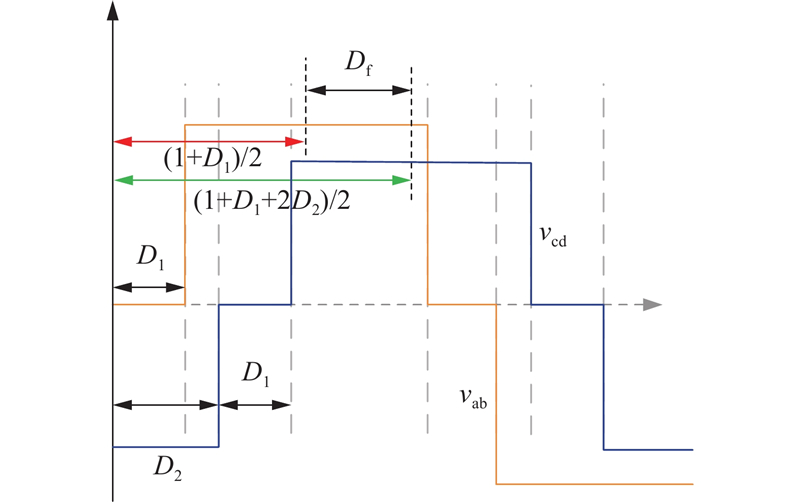
图 3 DPS控制下相移与移相比的关系
Fig.3 Relationship between phase shift and phase shift ratio with DPS
从图3可知,
式中:
2. 自适应离散控制集模型预测控制
基于MDCS-MPC方法,以降低电流应力为目标,采用DPS调制,引入桥内移相角,提高控制自由度. 利用KKT条件法推导得到DPS工况下的最优移相比关系,将原本的多自由度优化问题简化为单自由度的形式,设计ADCS-MPC控制器,在控制自由度、计算效率及电流应力优化方面均具有明显优势,适用于宽电压/负载范围工况下的DAB变换器运行.
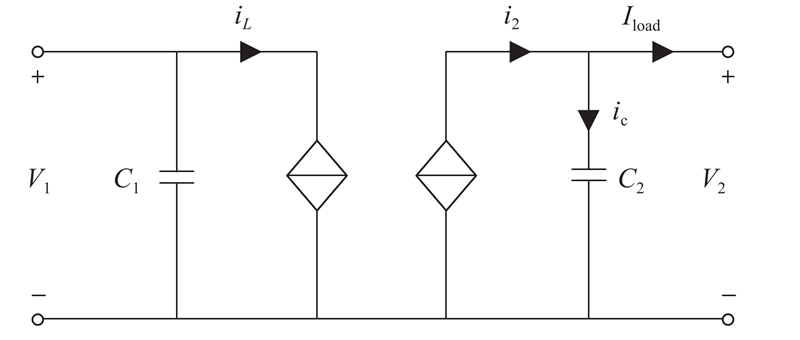
2.1. DAB预测电压模型
图 4
式中:
副边电流
SPS调制下
结合图2、式(2)、(14)~(16),可以计算得到DPS 2种模式下
为了实现对变换器输出电压的实时控制,建立输出端电压动态方程:
当采样时间足够小时,可以采用前向欧拉离散化方法,对式(19)进行近似处理,可得
考虑到计算延迟对控制的影响,预测电压模型采用两步预测法,同时假设负载电流
将式(20)代入式(21),可得
式中:
2.2. ADCS-MPC算法的工作原理
ADCS-MPC中的代价函数评估需要考虑系统输出和系统稳定2个方面,同时考虑到计算延迟,该算法通常需要2个控制周期的预测范围.据此设计的代价函数表达式为
式中:
成本函数中的
式(18)中,
式中:
定义
图 5
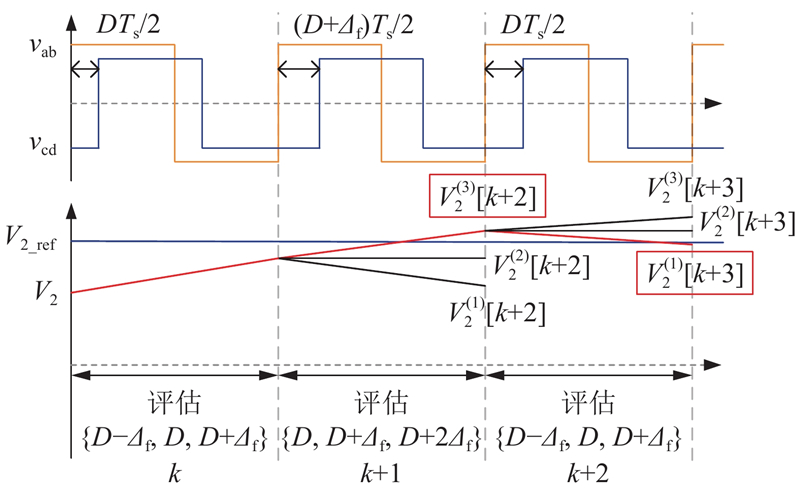
式中:
自适应步长的幅值与输出电压误差有关,当误差处于调节区间时,误差增大则
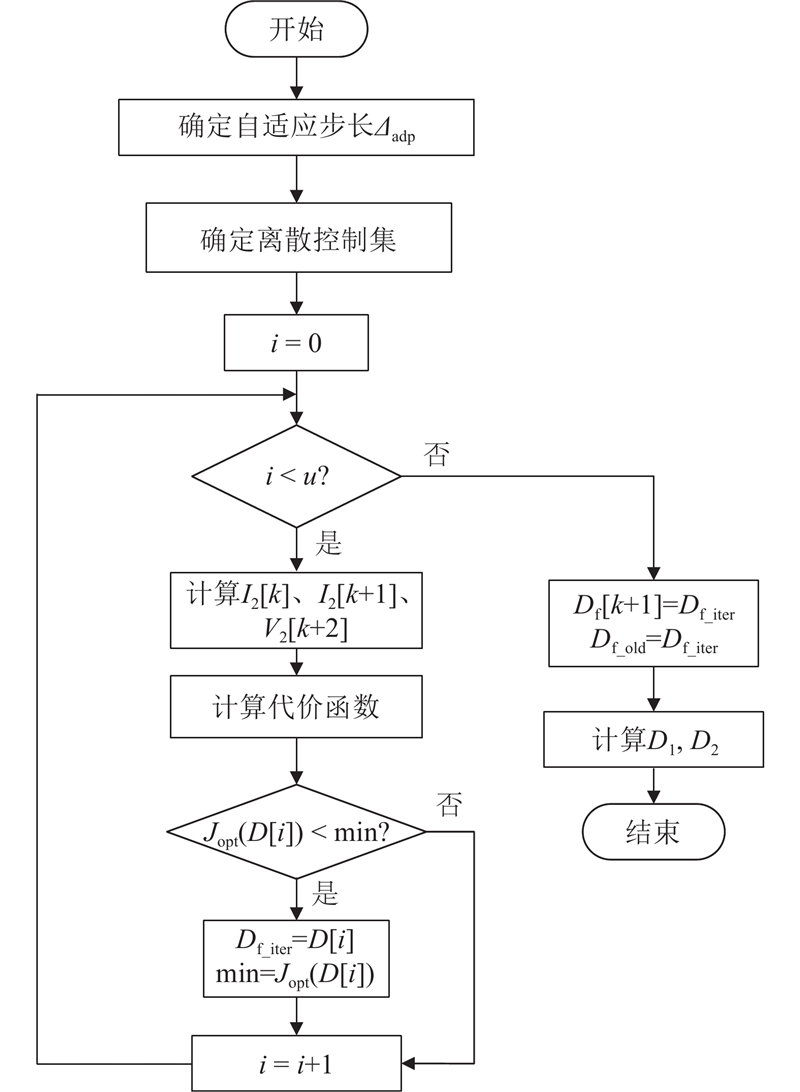
2.3. 控制算法的实现
如图6所示为应用电流应力优化的ADCS-MPC算法的整体控制方案框图.
图 6
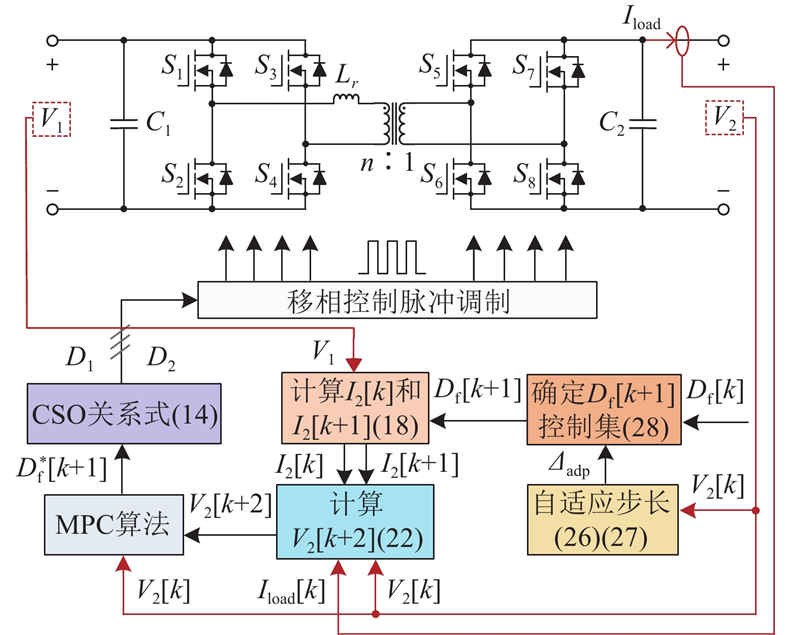
控制方法主要分为两部分,分别是模型预测控制确定移相比
图 7
3. 实验结果及分析
图 8
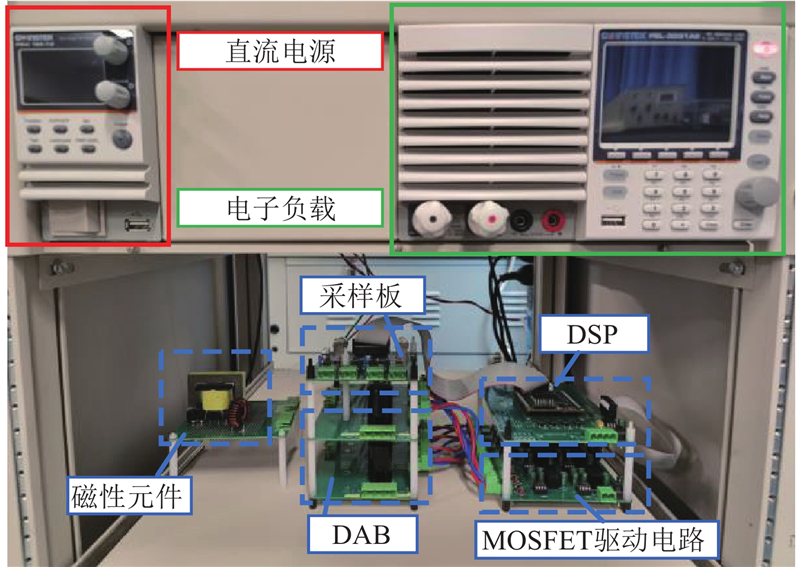
表 2 DAB变换器样机的主要参数
Tab.2
| 参数 | 数值 | 参数 | 数值 | |
| 30 | n | 1 | ||
| 10~30 | 60 | |||
| 20 | 470 |
3.1. 电流应力优化的实验结果
为了验证提出方法的电流应力优化效果,在DPS策略下应用ADCS-MPC算法,对比PI-DPS与PI-SPS 2种控制方式下的电流应力.
图 9
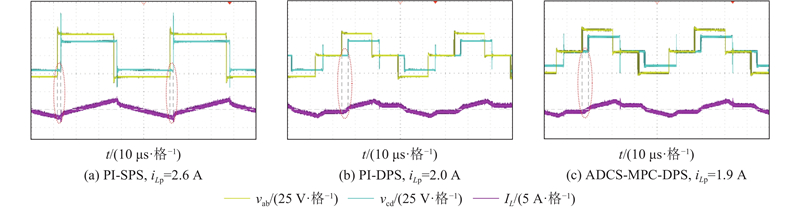
图 9 当电压比为1.5,功率标幺值为0.24时DAB变换器的稳态波形
Fig.9 Steady-state waveform of DAB when voltage ratio is 1.5 and per-unit power is 0.24
图 10
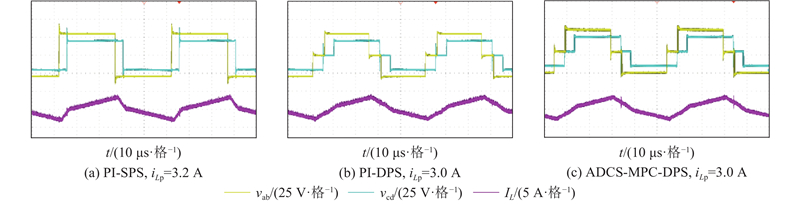
图 10 当电压比为1.5,功率标幺值为0.5时DAB变换器的稳态波形
Fig.10 Steady-state waveform of DAB when voltage ratio is 1.5 and per-unit power is 0.5
图 11
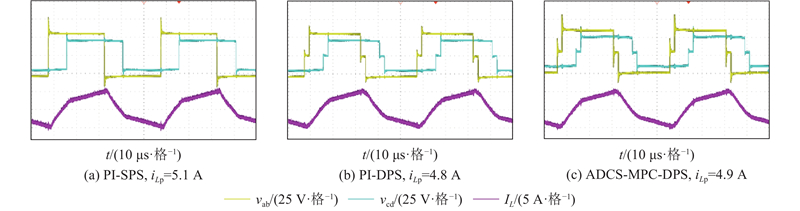
图 11 当电压比为1.5,功率标幺值为0.9时DAB变换器的稳态波形
Fig.11 Steady-state waveform of DAB when voltage ratio is 1.5 and per-unit power is 0.9
表 3 不同功率下控制方法的稳态性能对比
Tab.3
| P0 | 方法 | ||
| 0.24 | PI-SPS | 2.6 | 84.9 |
| 0.24 | PI-DPS | 2.0 | 90.4 |
| 0.24 | ADCS-MPC-DPS | 1.9 | 91.4 |
| 0.50 | PI-SPS | 3.2 | 90.2 |
| 0.50 | PI-DPS | 3.0 | 91.3 |
| 0.50 | ADCS-MPC-DPS | 3.0 | 91.9 |
| 0.90 | PI-SPS | 5.1 | 85.8 |
| 0.90 | PI-DPS | 4.8 | 85.7 |
| 0.90 | ADCS-MPC-DPS | 4.9 | 86.9 |
图 12
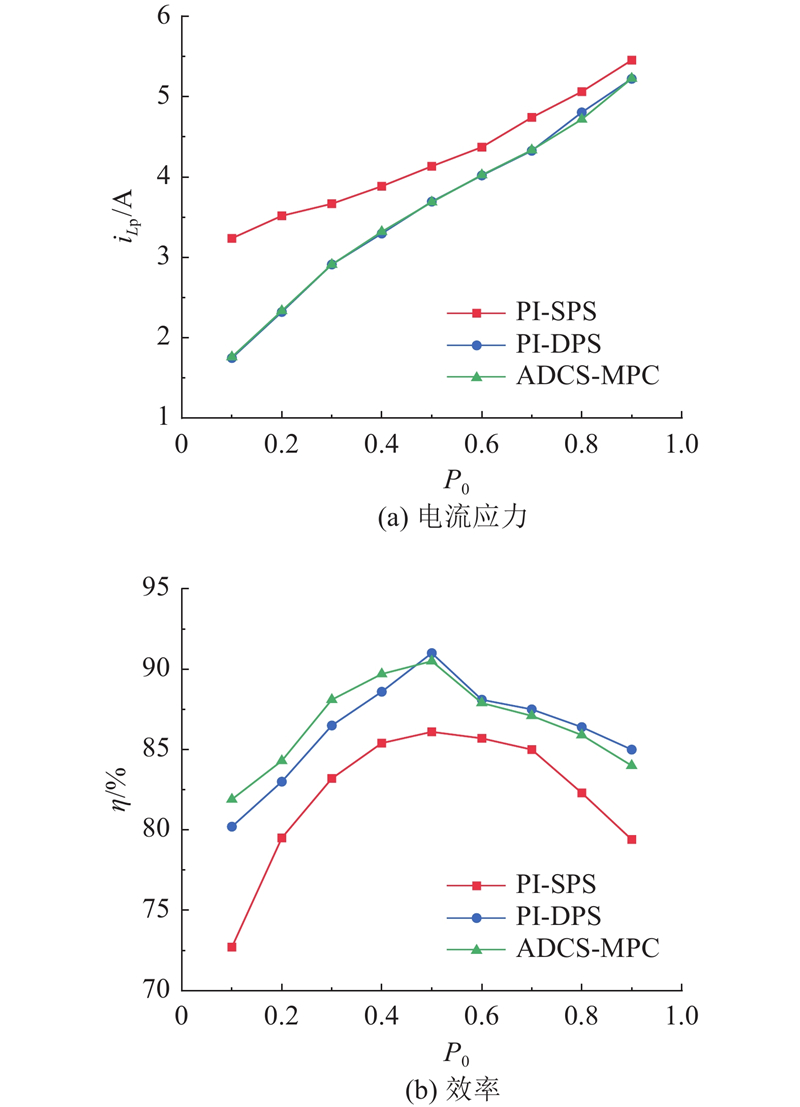
图 12 当电压比为2时效率和电流应力的实验对比结果
Fig.12 Experimental comparison result of efficiency and current stress when voltage ratio is 2
式中:
由式(30)可知,
开关损耗主要由开关器件无法实现软开关引起. 在关断死区时间内,电感中储存的能量须足以释放开关器件寄生电容
式中:
3.2. 暂态实验结果
以PI控制为对照,测试所提方法的动态性能.验证DAB变换器应对输出参考电压阶跃变化的动态响应能力,输入电压为30 V,负载保持不变,输入参考电压在25 V和15 V之间阶跃变化. 如图13(a)、(b)所示为输出参考电压升压阶跃变化实验的比较结果. PI-DPS方法需要15.6 ms恢复稳定,且有3 V的电压超调. ADCS-MPC方法的恢复时间只有5.6 ms,且无电压超调. 如图13(c)、(d)所示为输出参考电压降压阶跃变化实验的比较结果. PI-DPS控制方法需要12.4 ms才能使输出电压达到并稳定在参考值,且电压超调0.8 V. 采用ADCS-MPC控制方法,仅耗时5.4 ms,且完全避免了电压超调现象. 在负载阶跃变化实验中. 输入电压为30 V,输出电压设为20 V,负载功率标幺值为0.24~0.90,以20 Hz频率阶跃变化. 如图14所示为DPS调制负载阶跃变化的实验结果. 在此情况下,因瞬时功率不平衡,输出电压
图 13
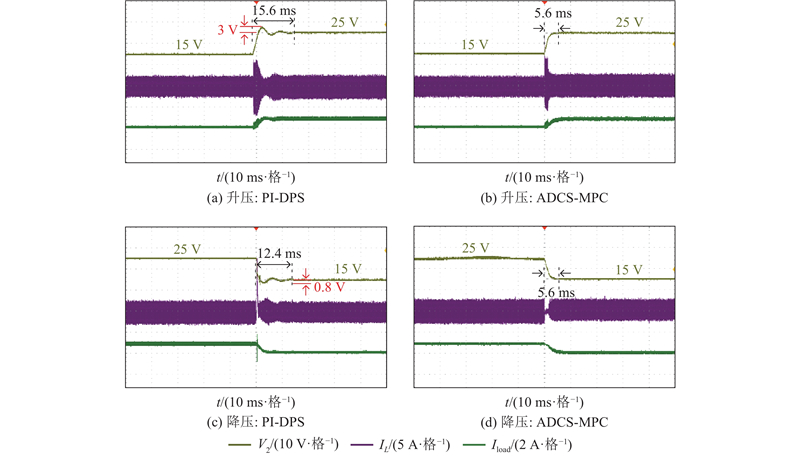
图 13
DPS调制下的
Fig.13
图 14
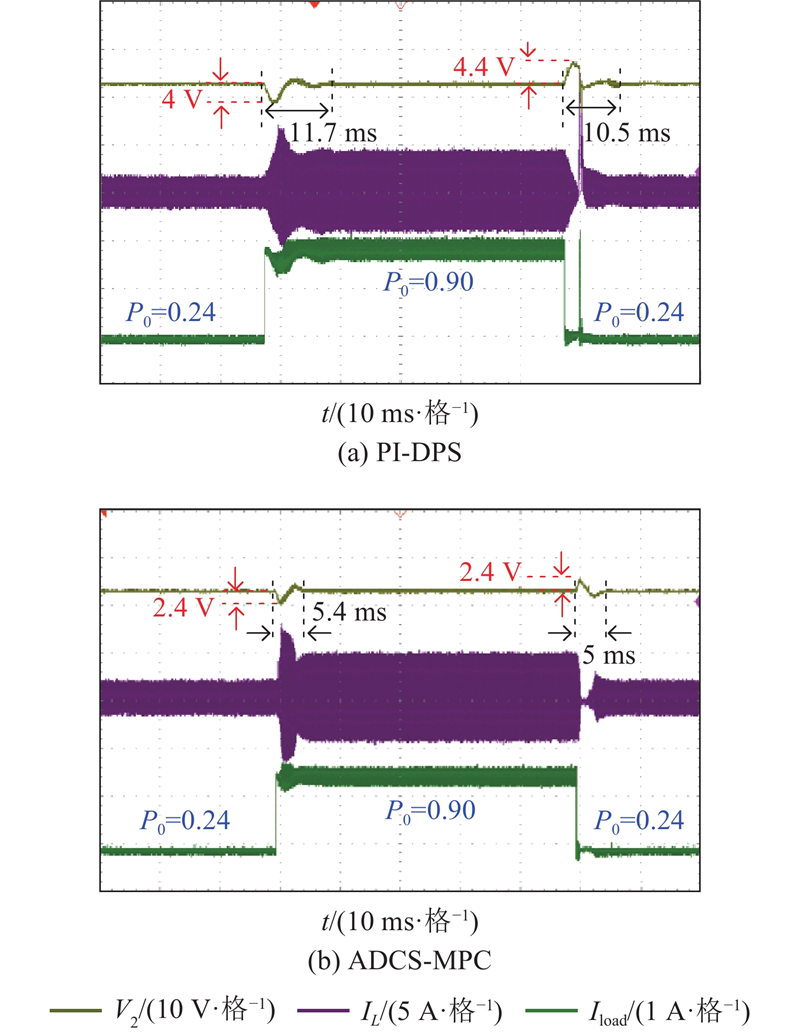
表 4 4种控制方法的性能对比
Tab.4
| 控制方法 | 实验工况 | tr/ms | Vos/V |
| 输入电压前馈的虚拟功率控制[16] | 58 | 6.7 | |
| 虚拟直接功率控制[17] | 12 | 3.0 | |
| 滑模控制[19] | 60 | 5.0 | |
| ADCS-MPC | 5.4 | 2.4 |
4. 结 论
(1)提出面向DPS-DAB变换器电流应力优化的MPC方法. 在显著优化电流应力的基础上,实现了输出电压动态跟踪能力的提升.
(2)利用KKT条件法推导得到最优移相比的解析解,可以在整个功率范围内精确计算得到能够最小化电流应力的移相比,为DAB变换器的电流应力优化提供闭式解.
(3)基于DAB变换器的降阶建模,构建电压预测模型. 引入自适应步长动态调整有限离散移相比控制集,对控制集内候选移相比的输出电压进行实时预测,通过代价函数评估筛选出最佳相移. 结合最优移相比解析解与最佳相移的关系,计算得到最佳移相比.
(4)搭建100 W DPS-DAB变换器的原型机,并均进行稳态与动态实验,对所提方法的有效性进行验证. 该研究工作为高效率、高动态性能要求的应用场景提供了具有重要工程价值的DAB变换器优化控制解决方案.
参考文献
Review on advanced control technologies for bidirectional DC/DC converters in DC microgrids
[J].
智能电网中的新一代高频隔离功率转换技术
[J].
Next-generation high-frequency-isolation power conversion technology for smart grid
[J].
A bidirectional isolated DC–DC converter as a core circuit of the next-generation medium-voltage power conversion system
[J].
Optimal phase-shift control to minimize reactive power for a dual active bridge DC–DC converter
[J].
双重移相DAB变换器回流功率优化与电流应力优化的对比研究
[J].
Comparative study of reactive power optimization and current stress optimization of DAB converter with dual phase shift control
[J].
双重移相控制的双向全桥DC-DC变换器及其功率回流特性分析
[J].
Bi-directional full-bridge DC-DC converters with dual-phase-shifting control and its backflow power characteristic analysis
[J].
Closed form solution for minimum conduction loss modulation of DAB converters
[J].
A hybrid five-variable modulation scheme for dual-active-bridge converter with minimal RMS current
[J].
Modeling and analysis of a dual-active-bridge-isolated bidirectional DC/DC converter to minimize RMS current with whole operating range
[J].
Minimum-current-stress boundary control using multiple-phase-shift-based switching surfaces
[J].
Minimum-current-stress scheme of dual active bridge DC–DC converter with unified phase-shift control
[J].
基于多目标优化的高频DAB变换器混合多重移相控制策略
[J].
Hybrid phase shift control strategy for high-frequency DAB converter based on multi-objective optimization
[J].
Current stress optimized strategy for the dual-active-bridge converter with triple-phase-shift and variable DC-link voltage control
[J].
Discrete extended-phase-shift control for dual-active-bridge DC–DC converter with fast dynamic response
[J].
Modeling and advanced control of dual-active-bridge DC–DC converters: a review
[J].
基于输入电压前馈的双向有源桥DC-DC变换器虚拟功率控制方法
[J].
Virtual power control scheme of dual active bridge DC-DC converters based on input voltage feedforward
[J].
Virtual direct power control scheme of dual active bridge DC–DC converters for fast dynamic response
[J].
Disturbance-observer-based DC-bus voltage control for ripple mitigation and improved dynamic response in two-stage single-phase inverter system
[J].
双有源桥DC-DC变换器电压及电流的非线性积分滑模控制策略
[J].
Non-linear integral sliding mode control strategy for voltage and current of dual active bridge DC-DC converter
[J].
Model predictive control for dual-active-bridge converters supplying pulsed power loads in naval DC micro-grids
[J].
Moving discretized control set model-predictive control for dual-active bridge with the triple-phase shift
[J].
Predictive control based DC microgrid stabilization with the dual active bridge converter
[J].
双有源桥变换器移动离散控制集无模型预测电压控制策略
[J].
Model-free predictive voltage control with moving-discrete-control-set for dual active bridge converters
[J].
Efficiency characterization and optimization of isolated bidirectional DC–DC converter based on dual-phase-shift control for DC distribution application
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}