

车载边缘计算(vehicular edge computing,VEC)是分布式计算架构,通过协同路侧基站、边缘设备和云服务器[3],将计算任务下沉至网络边缘,从而缩短车辆与服务器之间的传输路径,提高计算效率,满足车载网络的计算需求. Wu等[4]构建协同缓存方案(consistent hash for federated learning,CMCF),采用深度强化学习优化缓存策略,提高缓存命中率,减少内容传输时延. 余意等[5]对车辆社交关系下的内容获取成本最小化问题进行建模,引入博弈论分析纳什均衡,提出基于社交关系的协作缓存算法,降低内容获取成本. Xu等[6]利用数字孪生和区块链技术,提出智能安全任务卸载与缓存方案(intelligent secure task offloading and caching,ISTOC),采用多智能体双演员评论家算法,提高交易吞吐量并减少任务处理时延. 雒江涛等[7]通过参数化深度Q网络,提出联合优化内容缓存和功率分配的算法,提升本地缓存命中率. 崔亚平等[8]通过多智能体强化学习算法优化缓存分发决策,提高车联网内容的新鲜度,减少车辆时延,有效地降低宏基站负载.
动态车联网环境VEC面临资源受限[9]、运动不可预测及基础设施部署成本高等挑战. 近年来,无人机(unmanned aerial vehicle,UAV)凭借其机动性和不受地理限制的特性,被广泛应用于灾后救援、智慧农业、智能交通等多个领域[10]. 无人机可以作为移动边缘计算节点,为地面车辆提供计算资源,降低时延,并减少能耗[11]. 通过将无人机辅助移动边缘计算引入车联网[12],实现计算资源的动态调度,提高系统在复杂交通环境中的适应性和计算效率. 目前,已有研究采用多智能体演员-评论家算法[13]、流行度预测结合区块坐标下降[14]、Lyapunov优化框架[15]以及二部图神经网络预测[16]等方法,优化缓存、轨迹及任务卸载. 传统的UAV框架多依赖正交多址接入(orthogonal multiple access,OMA),在大规模车辆场景下的频谱效率较低. 非正交多址接入(non-orthogonal multiple access,NOMA)[17]允许多用户频谱共享,可以提升数据速率并优化资源调度,满足高吞吐量的需求.
本文研究基于NOMA的无人机集群,对车辆任务和内容进行预缓存. 结合NOMA技术提高内容可用性,降低数据传输时延,优化动态车联网环境下的整体网络性能. 设计基于NOMA的内容协作缓存框架,融合动态K-Means++对车辆周期性分簇,利用图卷积网络(graph convolutional network,GCN)实现跨无人机信息聚合,采用注意力增强QMIX强化学习方法优化分布式缓存决策,实现无人机集群缓存策略的智能化动态调控. 通过GCN邻域聚合与注意力机制,显著降低跨无人机通信开销,提升协作效率.
1. 系统模型
1.1. 系统分析
在城市交通场景中,构建支持NOMA的无人机集群辅助车联网系统. 如图1所示,高空平台(high altitude platform,HAP)集中管理多架无人机. 无人机与地面基站(base station,BS)均具备缓存与计算能力,当BS受限时,无人机作为补充节点,提供内容交付与任务卸载. 在该系统中,车辆根据空间分布动态聚类并关联无人机. 无人机通过保持间距抑制簇间干扰,利用NOMA频谱共享与连续干扰消除(successive interference cancellation,SIC)技术,提升频谱效率并抑制簇内干扰. 该框架旨在通过协作提升通信可靠性,降低时延并优化系统性能.
图 1
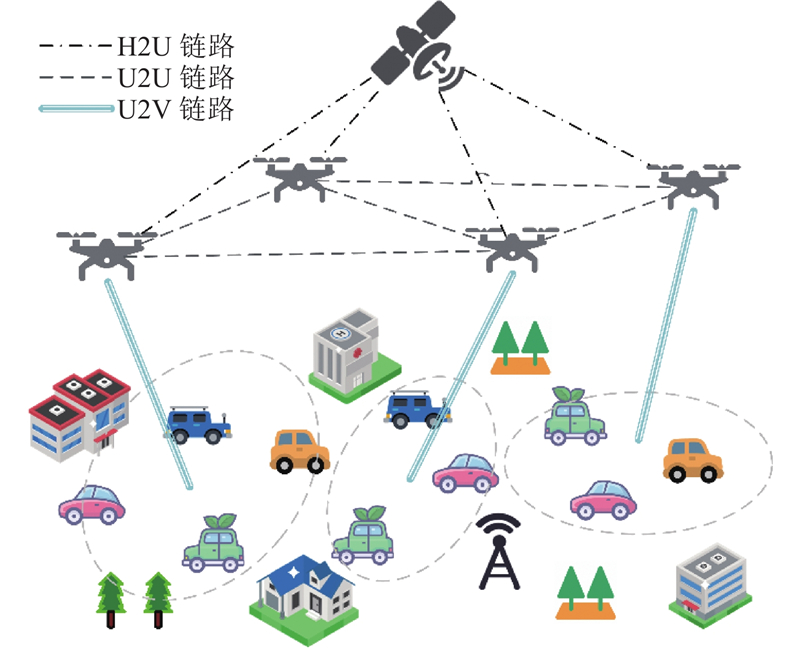
图 1 基于NOMA的无人机集群协同缓存示意图
Fig.1 Schematic diagram of cooperative caching in NOMA-based UAV cluster
1.2. 移动模型
无人机和车辆的集合分别表示为
为了还原复杂的城市交通场景,考虑2种车辆移动模型. 随机漫游模型的车辆移动角度和速度分别在变量范围内均匀分布. 定向移动模型车辆的移动遵循固定方向,速度保持与随机漫游模型相同的分布. 车辆
无人机以固定高度
式中:
无人机u在
1.3. 无人机协同内容缓存模型
假定有
无人机
式中:
内容请求概率遵循Zipf分布,即请求内容
式中:
内容交付分为以下3种方式.
1)边缘内容检索(
2)协作内容检索(
3) HAP内容检索(
当车辆
1.4. 通信模式
1)H2U传输.
H2U链路可以看作是威布尔信道模型,功率衰减可以通过下式计算:
式中:
式中:
2)U2U传输.
采用自由空间传播模型通信,功率衰减为
式中:
式中:
3)U2V传输.
3GPP Release-15规范[18]定义了每个无人机及其关联用户的U2V链路模型. 路径损耗取决于链路是视距LoS还是非视距NLoS,车辆
式中:
LoS的概率
式中:
NLoS的概率
考虑小规模衰落,时刻
式中:
引入服务指标
式中:
车辆
式中:
其中,
在具有SIC的下行NOMA链路中,无人机作为发射端,掌握所有服务车辆的信道状态信息,集中调度功率分配与解码顺序. 由于车载网络场景的动态变化,与无人机u连接的车辆
对于与车辆
第v个被解码用户的信干噪比(SINR)定义为
无人机u连接的车辆v的数据速率可以计算为
式中:
在第
式中:
综上所述,3种不同缓存方式的内容w检索延迟可以表示为
2. 问题描述
优化目标是最小化总体内容检索延迟. 优化问题表示如下.
3. 解决方案
3.1. 基于K-Means++的车辆聚类和无人机部署算法设计
设定聚类数量等于无人机数量,车辆位置集
3.2. GCQM无人机协同内容缓存策略
基于聚类结果,无人机须完成内容缓存任务. 由于无人机的感知能力有限,将内容缓存决策建模为分散式部分可观测马尔可夫决策过程(Dec-POMDP). 无人机代理通过与环境迭代交互学习个体策略,最大化系统缓存命中率. 为了应对拓扑的动态变化,引入图卷积网络(GCN)构建邻域图,通过信息交换探索节点间的协作关系. 提出基于QMix的多智能体协同缓存算法GCQM,采用集中训练与分散执行框架,增强无人机间的动态协调性.
1)Dec-POMDP.
观察:无人机代理
无人机代理
全局状态空间
动作:根据学习到的策略及观察结果,无人机
类似地,将全局动作空间定义为
奖励函数:由于缓存命中率的提高意味着内容检索延迟的减少,将奖励函数定义为每个代理的缓存命中率. 该函数由本地命中率和邻居协作命中率组成. 奖励函数表示为
式中:
2)图卷积网络设计.
无人机集群网络可以看作是图
a)物理邻近性:无人机
b)采用Jaccard差异度作为两无人机缓存内容互补性的度量:
为每个潜在邻居
式中:
每个节点将局部观测状态
式中:
为了捕捉节点之间的关系,利用多头注意力机制作为卷积核,生成潜在特征向量. 对于每个注意力头
式中:
在计算注意力得分后,节点
综合特征
3)GCQM无人机协同缓存算法.
设计的无人机协同缓存算法过程如下:状态
式中:
QMix使用混合网络将各个代理的局部值函数组合,通过集中学习得到分布式策略. 混合网络集成局部Q值,计算全局Q值:
式中:
最终成本函数的目标为最小化TD误差:
TD目标
式中:
采用贪婪策略选择
在梯度传播的过程中,损失
GCN参数根据局部Q值损失相对于GCN权重的梯度进行更新:
GCN的优化使用Adam优化器,损失函数与局部Q网络共享.
全局Q网络在每个代理选择最优动作时,将其视为联合行动,并评估整体效用. 整体训练过程交替执行经验采集与参数优化,基于重放缓冲区,无人机代理持续优化GCN、局部Q网络和目标Q网络,以最大化全局内容缓存的命中率. 提出的GCQM内容缓存算法的具体流程见算法1.
算法1 GCQM无人机协同缓存算法 1) 初始化:定义图 2) For each iteration do Step1: 图卷积网络特征提取和Q网络输入 3) For each UAV agent do 4) 使用式(30)~(32)提取最终特征并输入局部Q网络 5) 使用式(33)计算每个无人机的局部Q值 6) end 7) 将所有局部Q值输入全局混合网络 Step 2: 损失计算和参数更新 8) 使用式(35)计算全局 Q 网络的损失值 9) 更新GCN参数 10) 更新局部Q网络参数 11) 更新全局Q网络参数 Step 3: 动作选择与经验回放 12) 每驾无人机选择动作 13) 存储 14) 选择一个小批量样本并重复损失计算和参数更新过程 15) End 16) 输出:优化后的全局Q值和无人机行动策略
4. 仿真分析
4.1. 仿真环境的设置
仿真环境遵循3GPP TR 36.885标准中描述的曼哈顿场景设置,采用Python3.8和Tensorflow2.6构建1 km×1 km的仿真环境,车辆位置被建模为空间泊松分布,车辆数设定为20~100,最大速度为60 km/h,无人机5架(高度为100 m),邻居节点数为3,缓存容量为200 MB,高斯-马尔可夫移动模型的惯性系数为0.7,目标速度为10 m/s. 缓存周期时长为10 s,考虑30个大小为[8, 20] MB的内容,zipf分布参数
表 1 基于无人机缓存的网络仿真参数
Tab.1
| 参数 | 数值 | 参数 | 数值 | |
| HAP高度 | 20 km | 噪声功率 | −174 dBm/Hz | |
| HAP发射功率 | 40 dBm | 仿真时长 | ||
| HAP带宽 | 100 MHz | GCN学习率 | 0.005 | |
| H2U链路频率 | 3.5 GHz | Qmix学习率 | 0.001 | |
| U2V载波频率 | 2 GHz | 折扣因子 | 0.9 | |
| UAV带宽 | 20 MHz | 经验回放区 | ||
| 无人机发射功率 | 30 dBm | 小批量样本 | 64 | |
| 本地与协作命中率权重 | 0.67, 0.33 | 训练轮次 |
4.2. 对比方法
将提出的GCQM算法与以下缓存机制进行对比.
Random随机算法:将内容随机缓存到无人机.
LFU最不常用更新算法[20]:基于频率机制的算法. 该机制在缓存已满时更新请求次数最少的内容,计数窗口设定为50.
FIFO首先出局算法[21]:基于到达机制的算法. 在缓存已满后,使用检索内容更新最早的缓存内容.
DDQN算法[22]:强化学习算法. 无人机根据本地观察独立执行缓存决策,设定学习率为10−4,探索率为0.1,经验回放缓冲区大小为5×104.
GT-SSA[23]:基于博弈论的无人机云服务协同算法.
MADDPG[24]:基于分层多智能体强化学习的多无人机联合优化算法.
4.3. 实验分析
如表2所示为K-Means++聚类质量(轮廓系数)随车辆规模的变化趋势. 在20~100辆车的场景下,K-Means++轮廓系数均稳定大于0.54,验证了动态分簇机制对高密度车联网的适应性. 该算法通过概率化选择远距离质心,有效地捕捉车流聚集特征,为无人机部署提供了最优解.
表 2 不同车辆规模下K-Means++动态分簇轮廓系数表
Tab.2
| 车辆数 | 轮廓系数 | 车辆数 | 轮廓系数 | |
| 20 | 0.68 | 80 | 0.55 | |
| 40 | 0.64 | 100 | 0.54 | |
| 60 | 0.63 | — | — |
从表3可知,与OMA相比,NOMA在系统吞吐量和时延控制方面均展现出显著优势. 通过允许多用户共享同一频段,并基于信道条件动态分配功率,NOMA显著提高了频谱效率. 在时延方面,NOMA通过动态分簇和功率优化,减少了用户间的资源竞争,避免了OMA因固定资源块分配导致的排队等待,有效降低了系统时延,为高密度车联网场景提供了低时延、高吞吐量的通信保障.
表 3 NOMA与OMA的吞吐量及时延性能对比
Tab.3
| 车辆数 | 吞吐量/(Gb·s−1) | 时延/ms | |||
| NOMA | OMA | NOMA | OMA | ||
| 20 | 8.1 | 6.2 | 120 | 181 | |
| 60 | 12.3 | 7.5 | 145 | 382 | |
| 100 | 15.6 | 8.9 | 195 | 620 | |
如图2所示缓存命中率C、平均时延t、系统回程负载b和平均能耗W随不同车辆规模Nv变化的性能对比. 随着车辆数从20增至100,受资源竞争加剧的影响,各策略的缓存命中率均呈下降趋势,其中传统策略(random、FIFO、LFU)表现较差. 所提GCQM策略在100辆车的高密度场景下仍能保持35.2%的高命中率,展现出极强的扩展性与环境适应性. 这主要是因为GCQM引入图卷积网络(GCN)感知邻域状态与内容流行度,结合注意力QMIX优化了多智能体协作决策. 高命中率显著降低了对远程服务器的内容请求,使得GCQM的系统回程负载仅从1.13 GB上升至2.26 GB,远低于Random策略的4.12 GB,有效缓解了核心网的压力. 在时延与能耗方面,GCQM始终保持最优水平,100辆车时的平均时延仅为275 ms,能耗仅为46.6 mJ. 所提GCQM策略的性能优势源于动态分簇机制使通信距离最小化,且NOMA频谱共享提升了接入速率,配合多智能体协同决策进一步减少了冗余通信与能量浪费,验证了所提联合优化框架在高密度环境下的高效性与鲁棒性.
图 2
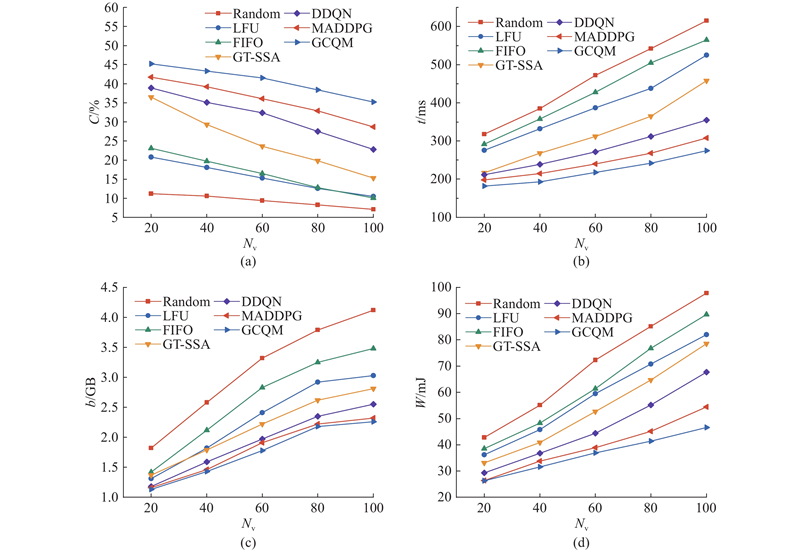
图 2 不同车辆规模下的命中率、时延、系统回程负载及能耗性能评估
Fig.2 Performance evaluation of hit rate, delay, backhaul load and energy consumption under different vehicle scale
如图3所示为缓存命中率、平均时延、系统回程负载和平均能耗随不同无人机缓存容量K变化的趋势. 当缓存容量由100 MB增至300 MB时,GCQM的缓存命中率大幅提升了60.2%,涨幅显著优于DDQN的44.3%. 这证明GCN特征融合机制能够通过动态聚合邻域无人机的缓存状态,实现对高流行度内容的精准预缓存. 由于LFU算法仅依赖历史请求频率,当容量达到300 MB时命中率不足GCQM的40%,显示了本文方案在流行度动态预测方面的核心价值. 随着缓存容量的扩大,GCQM的平均时延表现出持续下降的态势. 这一性能的提升源于命中率提高大幅减少了对高延迟H2U链路的内容请求与传输依赖,K-Means++分簇对通信距离进行持续优化以及NOMA功率分配对U2V链路信号质量的改善. 在回程负载与能效方面,GCQM展现出显著优势. 注意力机制通过精准加权邻居状态提升了U2U内容共享比例,使得回程负载仅约为DDQN的58.8%,系统能效随着容量增加而显著提升,总能耗降幅达到58.2%,远高于未整合信道增益与SIC解码模型的GT-SSA策略,验证了所提联合优化框架在资源调度与绿色通信方面的优越性.
图 3
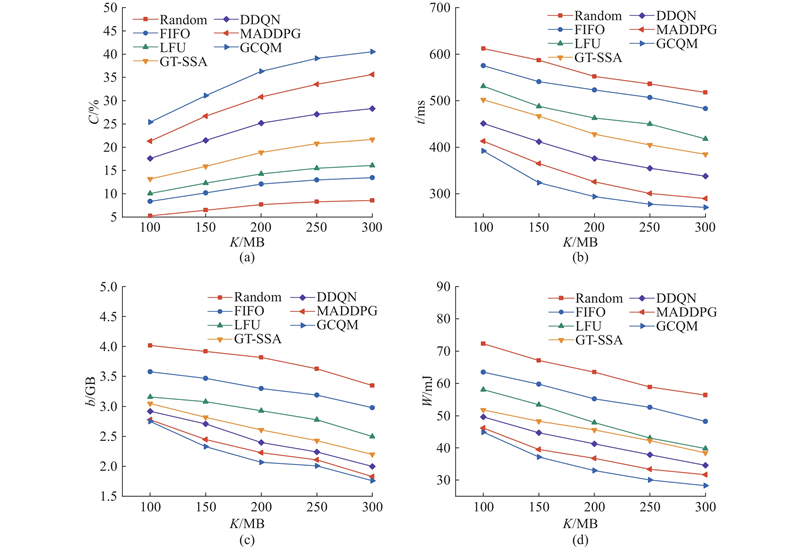
图 3 不同无人机缓存容量下的命中率、时延、系统回程负载及能耗性能评估
Fig.3 Performance evaluation of hit rate, delay, backhaul load and energy consumption under different UAV cache capacity
如图4所示为GCQM完整模型、GCQM-MeanPool(均值池化替代GCN)及GCQM-NoGCN(移除GCN)的平均奖励r随训练轮次e变化的收敛性能对比图,验证了图卷积网络在无人机协作缓存决策中的关键作用. GCQM的全局平均奖励显著高于GCQM-MeanPool和GCQM-NoGCN. 在动态车联网场景中,无人机的邻域拓扑关系复杂且频繁变化,GCN通过多层图卷积与注意力机制,有效捕捉节点间非线性的协作依赖关系. MeanPool虽然能够聚合邻居信息,但简单的均值操作无法区分不同邻居的特征信息,导致特征表达能力受限. NoGCN因完全依赖本地观测,策略学习陷入局部最优,无法实现跨无人机的协同优化.
图 4
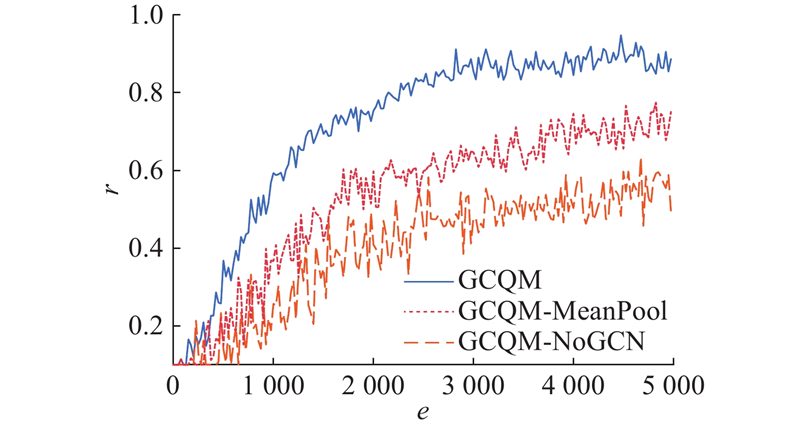
图 4 GCN在无人机协作缓存收敛性能中的关键作用验证
Fig.4 Validation of GCN's critical role in UAV cooperative caching convergence
5. 结 语
提出基于NOMA的无人机集群协作内容缓存方案. 通过改进的K-Means++动态分簇优化车辆-无人机关联,结合图卷积网络与注意力QMIX算法,实现分布式协作缓存决策的长期优化. 仿真结果表明,所提方案在提升缓存命中率的同时显著降低了时延,NOMA技术进一步优化了系统吞吐量与能效性能. 该研究为动态车联网环境下的高效资源调度提供了理论支持. 未来将进一步探索多无人机协同轨迹规划、异构网络融合及无人机数量的动态调整策略,优化复杂场景下的资源利用率.
参考文献
A tutorial on 5G NR V2X communications
[J].DOI:10.1109/COMST.2021.3057017 [本文引用: 1]
DRL-based V2V computation offloading for blockchain-enabled vehicular networks
[J].DOI:10.1109/TMC.2022.3153346 [本文引用: 1]
Joint task offloading and resource allocation for energy-constrained mobile edge computing
[J].DOI:10.1109/TMC.2022.3150432 [本文引用: 1]
Federation-based deep reinforcement learning cooperative cache in vehicular edge networks
[J].DOI:10.1109/JIOT.2023.3292374 [本文引用: 1]
车联网场景联合缓存及内容请求策略
[J].DOI:10.3772/j.issn.1002-0470.2022.05.007 [本文引用: 1]
Joint caching and content request strategy for Internet of vehicle
[J].DOI:10.3772/j.issn.1002-0470.2022.05.007 [本文引用: 1]
Digital-twin-assisted intelligent secure task offloading and caching in blockchain-based vehicular edge computing networks
[J].DOI:10.1109/JIOT.2024.3482870 [本文引用: 1]
基于参数化强化学习的车联网内容缓存和功率分配联合优化
[J].DOI:10.11999/JEIT220857 [本文引用: 1]
Joint optimization of content caching and power distribution for Internet of vehicles based on parametric reinforcement learning
[J].DOI:10.11999/JEIT220857 [本文引用: 1]
内容新鲜度保障的车联网多智能体缓存分发策略
[J].DOI:10.11959/j.issn.1000-436x.2025013 [本文引用: 1]
Multi-agent caching distribution strategy for content freshness guarantee in IoV
[J].DOI:10.11959/j.issn.1000-436x.2025013 [本文引用: 1]
RLBA-UAV: a robust and lightweight blockchain-based authentication and key agreement scheme for PUF-enabled UAVs
[J].DOI:10.1109/TITS.2024.3480029 [本文引用: 1]
Cellular, wide-area, and non-terrestrial IoT: a survey on 5G advances and the road toward 6G
[J].DOI:10.1109/COMST.2022.3151028 [本文引用: 1]
Supporting IoT with rate-splitting multiple access in satellite and aerial-integrated networks
[J].DOI:10.1109/JIOT.2021.3051603 [本文引用: 1]
无人机辅助MEC系统: 架构、关键技术与未来挑战
[J].DOI:10.11959/j.issn.1000-0801.2022237 [本文引用: 1]
UAV-assisted MEC systems: architecture, key technology, and future challenges
[J].DOI:10.11959/j.issn.1000-0801.2022237 [本文引用: 1]
UAV assisted cooperative caching on network edge using multi-agent actor-critic reinforcement learning
[J].DOI:10.1109/TVT.2022.3209079 [本文引用: 1]
Joint optimization of caching and content delivery in air–ground cooperation environment
[J].DOI:10.1109/JIOT.2024.3490612 [本文引用: 1]
Joint optimization of trajectory, offloading, caching, and migration for UAV-assisted MEC
[J].DOI:10.1109/TMC.2024.3486995 [本文引用: 1]
Joint cooperative caching and UAV trajectory optimization based on mobility prediction in the Internet of connected vehicles
[J].DOI:10.1109/TITS.2024.3429305 [本文引用: 1]
Power-domain non-orthogonal multiple access (NOMA) in 5G systems: potentials and challenges
[J].DOI:10.1109/COMST.2016.2621116 [本文引用: 1]
An overview of 3GPP release-15 study on enhanced LTE support for connected drones
[J].
Joint resource allocation and trajectory optimization in multi-cell UAV and sidelink heterogeneous networks
[J].DOI:10.1109/TWC.2024.3445149 [本文引用: 1]
Game theory-based UAV-cloud for service selection architecture in flying ad hoc networks
[J].DOI:10.1109/OJVT.2024.3430818 [本文引用: 1]
Cost-efficient deployment optimization for multi-UAV-assisted vehicular edge computing networks
[J].DOI:10.1109/JIOT.2024.3515107 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}