

现有水漂垃圾轨迹预测方法可以分为4类:1)水动力学方法,物理可解释性强,但对边界条件敏感,复杂地形下易因网格误差放大预测偏差[3];2)以马尔可夫链为代表的统计方法,能够基于历史数据统计特性建立状态转移规律[4],但其线性平稳假设难以适配垃圾轨迹的滞留、聚集、方向突变等非线性特征[5],河道场景精度受限;3)以支持向量机为代表的机器学习算法[6],通过核函数与集成学习突破非线性建模瓶颈,但面对高度复杂轨迹数据,核函数映射能力不足,难以找到最优特征空间;4)深度学习方法,通过端到端学习实现从人工特征工程到数据驱动表征的转变,在时序关系刻画上具有优势[7]. 循环神经网络(recurrent neural network,RNN)模型通过隐藏状态的循环连接,能够把历史信息带到当前时刻以捕捉轨迹的长短期依赖关系[8],刘凇佐等[9]将粒子群优化算法(particle swarm optimization,PSO)与门控循环单元(gated recurrent unit,GRU)结合,基于北大西洋漂流浮标数据验证了该模型具有一定的精度与时效性. Transformer的注意力机制可捕捉垃圾漂移轨迹的长时依赖关系,吴跃高等[10]提出的Seq2Seq-CA模型融合了拼接注意力机制提升了船舶轨迹预测精度,但注意力机制计算上的二次复杂度限制了其在水漂垃圾实时预测中的应用. 随着对时空依赖性建模需求的深化,Bai等[11]通过串联Transformer与图注意力网络(graph attention networks,GAT)捕捉时序与空间依赖,在交通流预测中表现优异. 但深度图网络易出现过平滑问题,导致异质性区域轨迹波动特征被均质化[12]. 近年来模型动态化与自适应能力成研究热点[13],Zhou等[14]提出自适应图卷积循环网络(adaptive graph convolutional recurrent network,AGCRN),引入可学习邻接矩阵与门控单元,提升了时空建模能力. 然而水漂垃圾轨迹的空间关联具有时变特性,基于节点相似度的自适应矩阵在捕捉动态关联[15]的同时引入了冗余边,削弱了模型对关键节点的聚焦能力. Liu等[16]结合多图融合与自注意力机制构建船舶动态模型,在天津港附近水域预测效果良好;Zhao等[17]通过将K跳图卷积与长短期记忆网络(long short-term memory,LSTM)融合,提升了船舶轨迹的预测效果. 但垃圾轨迹时空特征的跨尺度交织性使得套用传统分离式建模易产生特征解耦误差[18].
针对上述问题,本研究提出基于多尺度自适应图卷积的水漂垃圾轨迹预测(multi-scale adaptive graph convolution model for floating garbage trajectory prediction,MAGC Trajectory)模型. 在时空异质性动态建模方面,设计了自适应门控图卷积模块,融合时空先验约束的静态拓扑与水流突变驱动的动态拓扑,实现时空异质因子的差异化表征. 将该模块运用到多尺度图卷积网络,避免了时空建模割裂和深度图卷积网络过平滑问题;在多尺度误差积累抑制方面,构建多尺度时空交互模块,通过时空路由层将空间语义解耦至多尺度时间特征流,阻断误差在模型多尺度特征间的级联放大,提升预测鲁棒性;在此基础上,引入改进非线性学习层,以可学习的自适应激活函数整合多尺度时空特征,缓和多尺度特征间的冲突性干扰. 最后,结合概率预测层量化复杂环境下的漂移路径不确定性区间,提高预测结果的可靠性[19].
1. 本研究MAGC-Trajectory方法
1.1. 图卷积方法
水漂垃圾运动轨迹受多方面的因素干扰,河道地形蜿蜒曲直,错综复杂,其弯曲程度和宽窄会影响河道环境,进而使得水漂垃圾的运动状态及运动轨迹的规律难以捉摸. 水漂垃圾及其所处环境可使用图结构建模. 在以时序关系为基础构建图结构时,设
1)谱域图卷积基于图拉普拉斯矩阵的谱分解,通过图的频率域特性对信号进行卷积[20]. 谱域图卷积表达式如下:
式中:
直接求谱分解计算代价较高,通常用切比雪夫多项式将
式中:
式中:
2)空域图卷积通过节点及其邻居的信息聚合,实现对图结构数据的特征提取. 在图的邻接关系上操作,利用邻接矩阵
空域图卷积表达式如下:
式中:
1.2. MAGC-Trajectory整体流程
如图1所示为提出的MAGC-Trajectory方法. 在自适应门控图卷积(adaptive gated graph convolution,AGGC)模块中,轨迹数据经因果卷积进行维度变换,以挖掘潜在特征表示,将预定义邻接矩阵与基于节点相似度计算得到的自适应邻接矩阵通过门控机制进行融合,构建自适应门控邻接矩阵,并应用到谱域、空域图卷积中,加强模型时间、空间特征的捕获能力;在多尺度时空特征生成模块中,并行地应用4个具有不同感受野的谱域AGGC模块和1个空域AGGC模块,生成4个时间特征及1个空间特征,以捕获时间、空间依赖关系;在时空特征融合层(spatiotemporal feature fusion layer,STFFL)中设计时空路由层(spatiotemporal routing layer,STRL)与双向特征融合层(bidirectional feature fusion layer,Bi-FFL),空间特征图作为动态路由的引导信号,分别与4个尺度的时间特征图进行加权融合,生成4个融合空间信息的时空特征图,实现空间结构对多尺度时间特征的动态引导与精细化调制;双向特征融合层对4个融合后的时空特征图进行信息交换与整合,进一步提炼跨尺度的时空依赖信息,实现对漂移轨迹中多尺度时空模式的统一建模. 改进非线性学习层(enhanced nonlinear learning layer,ENLL)接收整合特征,通过动态调整激活函数,能够自适应地平衡全局与局部模式的表示,增强模型对轨迹中复杂非线性关系的刻画能力. 最后,设计概率预测层(probabilistic forecasting layer,PFL)为输出提供不确定性量化,能更全面地反映水漂垃圾在真实环境下的动态变化并提高预测的可靠度.
图 1
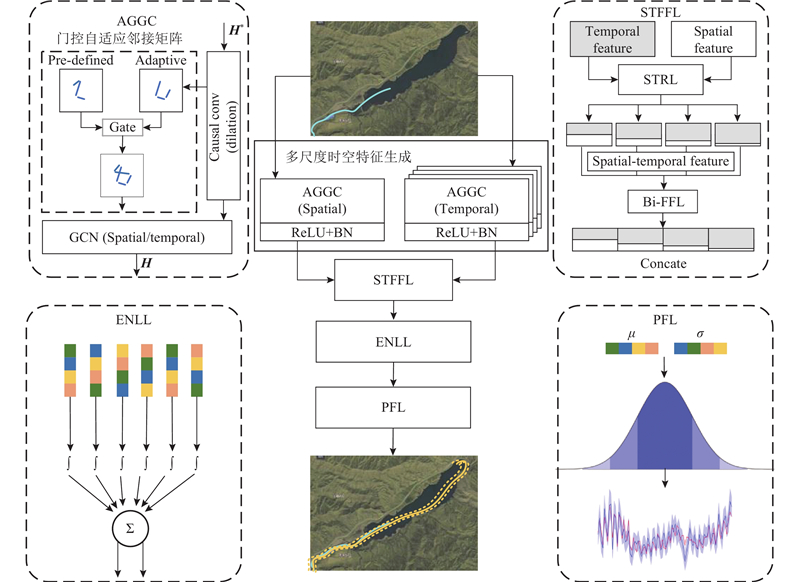
图 1 水漂垃圾轨迹多尺度自适应图卷积模型(MAGC-Trajectory)
Fig.1 Multi-scale adaptive graph convolution model for floating garbage trajectory(MAGC-Trajectory)
1.3. 多尺度时空特征生成
如图2所示为多尺度时空特征生成模块结构示意图. 为了实现对水漂垃圾轨迹中宏观运动趋势与局部漂移模式的精细捕捉,使用谱域AGGC和空域AGGC设计多尺度时空特征生成模块[22]. 输入数据通过因果卷积提取漂移轨迹的多尺度时间与空间特征. 多尺度特征生成模块输出1个空间特征以及4个多尺度时序特征共5个特征:
图 2

图 2 多尺度时空特征生成模块结构示意图
Fig.2 Structure diagram of multi-scale spatiotemporal feature generation module
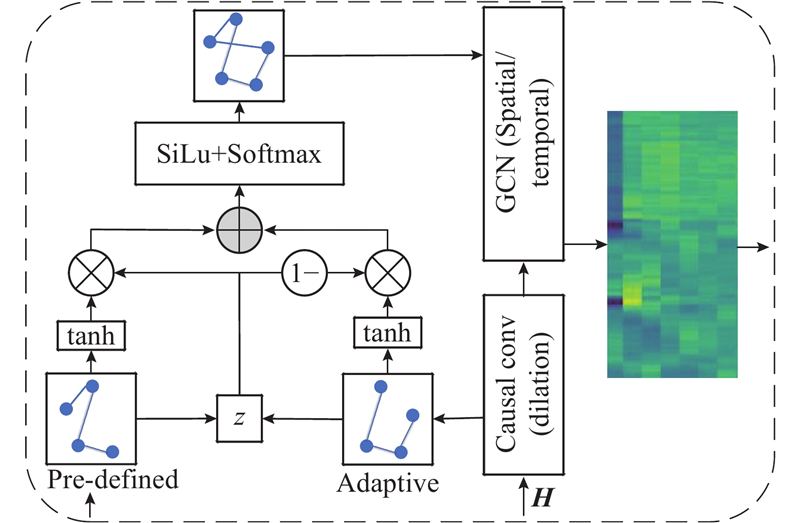
如图3所示为本研究设计的自适应门控图卷积方法. 通过切比雪夫图卷积捕获时序依赖关系;通过空域图卷积来捕获空间依赖关系,实现轨迹数据中的多变量之间的融合. 首先,设输入数据为
图 3
式中:
特征矩阵
预定义邻接矩阵
式中:z为门控权重;
通过门控权重
式中:
式中:
1.4. 多尺度时空特征交互
如图4所示,多尺度时空交互模块通过Bi-FFL与STRL实现对异质性特征的解析. 其中,STRL将空间特征映射至不同时间尺度域,提取各尺度对应的空间语义分量,并通过路由系数动态调节空间分量在时间维度的投影,在保留时序特征动态变化模式的同时,融入空间分布信息,使模型能够同步考量空间与时间维度的相互依赖关系. 为了高效融合多尺度时空特征,Bi-FFL以4个时空特征为输入,通过特征贡献度加权的双向特征交互机制充分整合多尺度信息,在提升时空表征精度的同时,有效抑制传统方法中误差随尺度传导的级联放大效应.
图 4
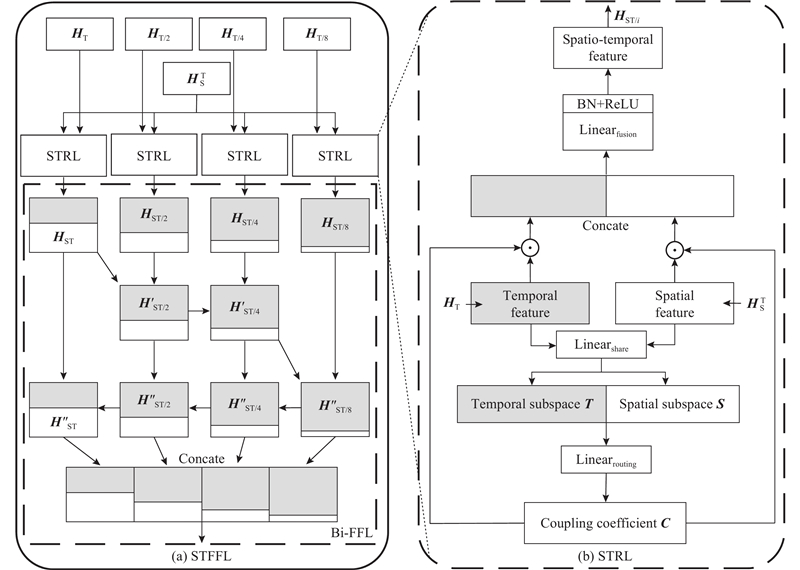
图 4 时空特征融合层结构示意图
Fig.4 Structure diagram of spatiotemporal feature fusion layer
如图4(b)所示,时空路由层将空间特征嵌入到时序特征中以形成水漂垃圾时空特征:首先,对空间特征
式中:
式中:
式中:
如图4(a)中Bi-FFL所示,在时空特征融合方式中,每个特征接受2个上级输入,通过将特征上采样或下采样以适配维度,对输入特征
1.5. 改进非线性学习层ENLL
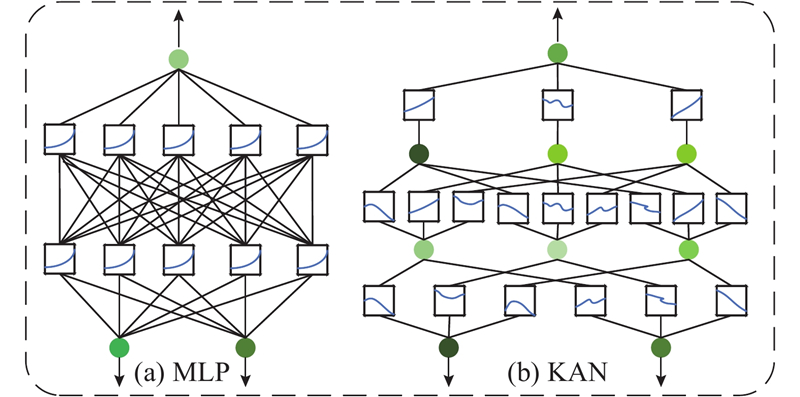
提出基于KAN(kolmogorov-arnold network)[23]的改进非线性学习层ENLL,其可学习激活函数使其在处理高度非线性、跨尺度的轨迹特征时具有更强的拟合能力和灵活性,它能更好地协调大尺度趋势与微尺度扰动,从而缓解特征冲突,减少轨迹预测失真.
如图5所示为MLP与KAN结构对比. 在多层感知机中,点代表输入的水漂垃圾特征数据,边代表权重,曲线代表固定的激活函数,而KAN在每个点均能够汇总可学习激活函数的输出且不进行任何非线性变换.
图 5
式中:
KAN的核心计算开销来源于其可学习的激活函数,当网络宽度较大、深度增加,或者每个激活函数使用的B样条基函数数量较多时,这些操作会变得非常密集,降低整体模型的实时性. 因此,ENLL在原始KAN的基础上优化了隐藏层宽度、网络深度以及激活函数基函数的初始化策略,以适应水漂垃圾轨迹数据的维度和时空尺度特性,在保证模型容量的同时提升计算效率与泛化能力.
综上,与传统的多层感知器相比,ENLL能够更好地处理水漂垃圾轨迹中如河道地形和水流波动这类高度非线性特征造成的影响. 在保持整体轨迹平滑性的同时,通过动态调整激活函数,使得模型能够精确捕捉细小的波动和变化,从而提高了水漂垃圾轨迹预测的准确性与灵活性.
1.6. 概率预测层
在水漂垃圾轨迹预测任务中,垃圾的具体漂流位置随时间动态改变,模型预测的单一确定性结果往往存在较大误差,导致了预测位置不确定性高的问题. 本研究设计概率预测层,采用均值-方差估计方法来捕捉观测中的随机不确定性,提供比确定性预测更为全面的信息. 设数据集
每一次前向传播会输出一个正态分布,其均值为
使用均值和方差估算轨迹预测的区间:
2. 实验设计与验证
2.1. 数据集介绍
如图6(a)所示,鹦鸽嘴水库位于张掖市肃南县梨园河中游,距临泽县城约41 km. 如图6(b)所示展示了流经兰州市城区的黄河部分河段. 2处水域均是所在区域内重要的水源地与生态节点. 水域内水漂垃圾的运动轨迹均受到风速、水流速度、河道地形及气象条件等多重因素的交互影响,呈现出高度随机与不可预测的特征,给监测数据的获取和分析带来较大挑战. 将垃圾轨迹的时空变化视为风速、水流、地形及气象条件动态耦合作用的综合结果,通过分析轨迹的漂移模式与速度波动,实现环境要素的隐式融合计算,无需解耦各因素独立建模. 基于此,为了揭示水漂垃圾的运动规律并制定相应的治理策略,通过GPS定位器采集水漂垃圾的运动轨迹,并计算其经向速度、纬向速度、经向加速度与纬向加速度4个运动学因素,结合经度与纬度信息,构建了包含6个要素的多因素轨迹数据集. 经纬度定位器主芯片为ML307A,使用SIM卡实现定位. 按照美国国家海洋和大气管理局(national oceanic and atmospheric administration,NOAA)大西洋海洋与气象实验室的全球漂流器数据集的制作标准[24]处理原始轨迹数据,并分别计算其经纬度方向上的分解速度和加速度. 共采取了长度不一的50条水漂垃圾轨迹数据,其中训练集、测试集、验证集划分比例为6∶2∶2,任选出6条验证轨迹用于展示. 轨迹1、2、3、4采集自鹦鸽嘴水库,轨迹5、6采集自黄河兰州段.
图 6
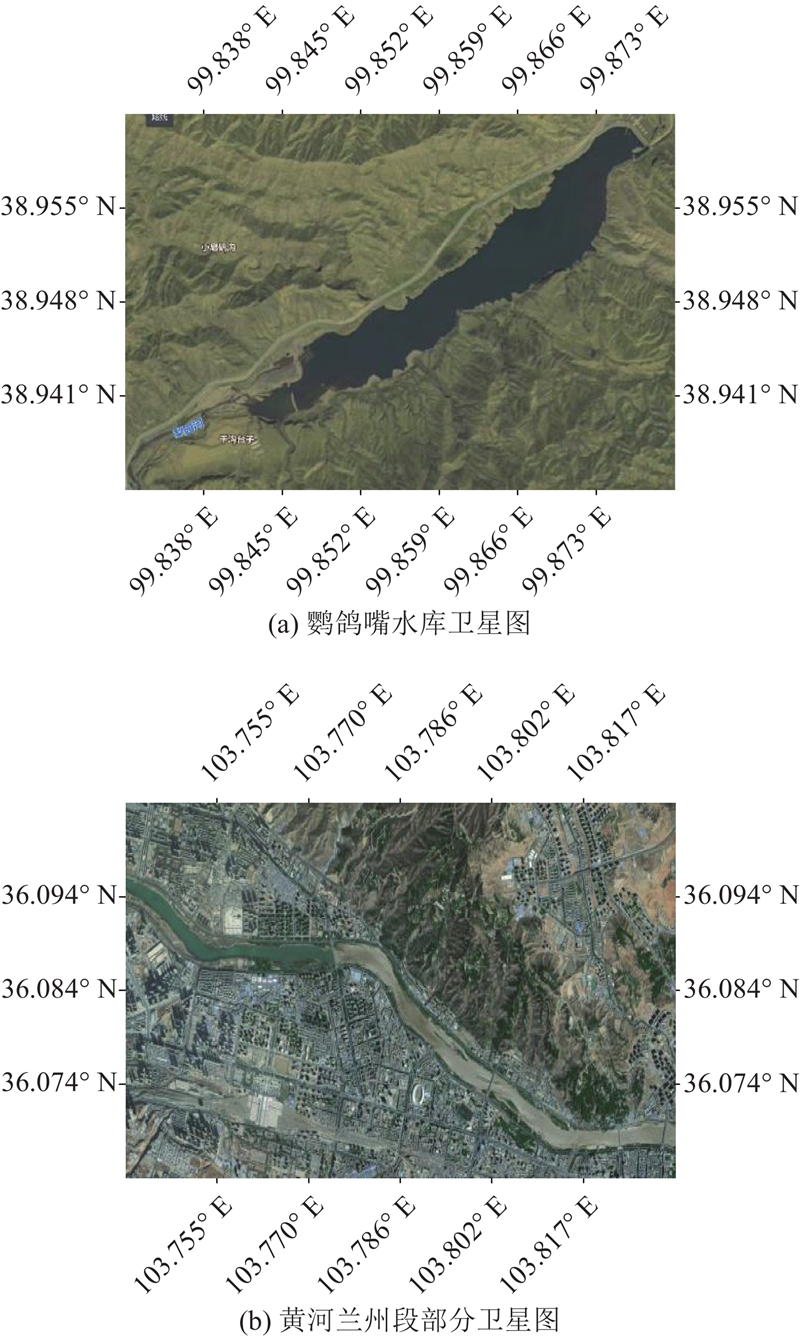
图 6 鹦鸽嘴水库及黄河兰州段卫星图
Fig.6 Satellite images of Yinggezui reservoir and Lanzhou section of Yellow River
表 1 水漂垃圾轨迹数据集轨迹点位置及数量信息
Tab.1
| 轨迹 | 采集时间 | 地点 | 轨迹点数目 | 起点经度/(°E) | 起点纬度/(°N) | 终点经度/(°E) | 终点纬度/(°N) |
| 轨迹1 | 11月 | 鹦鸽嘴水库 | 573 | 99.833 099 00 | 38.936 024 00 | 99.850 564 97 | 38.942 732 20 |
| 轨迹2 | 11月 | 鹦鸽嘴水库 | 1 879 | 99.832 001 94 | 38.934 474 47 | 99.843 727 81 | 38.938 661 67 |
| 轨迹3 | 11月 | 鹦鸽嘴水库 | 2 244 | 99.831 926 35 | 38.934 483 90 | 99.850 458 20 | 38.943 343 19 |
| 轨迹4 | 11月 | 鹦鸽嘴水库 | 1 708 | 99.833 256 67 | 38.936 136 97 | 99.869 500 05 | 38.955 534 76 |
| 轨迹5 | 5月 | 黄河兰州段 | 4 327 | 103.769 908 25 | 36.089 722 37 | 103.817 942 8 | 36.070 174 72 |
| 轨迹6 | 5月 | 黄河兰州段 | 3 234 | 103.740 453 61 | 36.095 214 53 | 103.765 875 0 | 36.090 130 10 |
表 2 轨迹1数据展示
Tab.2
| 时间 | 经度/(°E) | 纬度/(°N) | 经向速度/(m·s−1) | 纬向速度/(m·s−1) | 经向加速度/(m·s−2) | 纬向加速度/(m·s−2) |
| 2024/11/30 | 99.833 099 00 | 38.936 024 00 | 0.118 678 872 | 0.032 987 159 | 0.011 867 887 | 0.003 298 716 |
| 2024/11/30 | 99.833 102 81 | 38.936 010 28 | 0.133 466 464 | 0.021 879 247 | 0.013 346 646 | 0.002 187 925 |
| 2024/11/30 | 99.833 100 28 | 38.935 994 85 | 0.124 292 856 | 0.084 214 035 | 0.012 429 286 | 0.008 421 404 |
| 2024/11/30 | 99.850 561 54 | 38.942 724 88 | 0.063 335 87 | 0.029 671 362 | 0.006 333 587 | 0.002 967 136 |
2.2. 评价指标与实验参数
为了验证所提多尺度图卷积模型的有效性,采用平均绝对误差(mean absolute error,MAE)、均方根误差RMSE、预测区间覆盖概率(prediction interval coverage probability,PICP)、平均预测区间宽度(mean prediction interval width,MPIW)作为评价指标.
式中:
式中:
MPIW越小表示预测区间越窄.
本研究实验的硬件环境配置如下:CPU为13th Gen Intel® Core™ i5-13600KF,GPU为NVIDIA GeForce RTX
2.3. 消融实验分析
为了评估模型中各部分的有效性,以GNN为基准模型,增加多尺度方法,模型命名为GNN-Multi-Scale(GNN-MS);在此基础上增加自适应门控图卷积方法,模型命名为GNN-Adaptive-Gate(GNN-AG);在此基础上增加多尺度特征融合方法,模型命名为GNN-Fusion-Network(GNN-FN);在此基础增加改进非线性学习层,模型命名为MAGC-Trajectory. 在轨迹3上进行消融模型的实验分析.
如表3所示展示了各消融模型在2号塑料类轨迹上的预测结果. 所有改进模型均实现了100%的预测区间覆盖率. 相较于基准模型GNN,GNN-MS的MAE降低至0.000 236 09,RMSE降低至0.000 312 67,表明性能显著提升,其多尺度特征提取有效整合了时空信息,提升了长期趋势和关键转折点捕捉能力,但其MPIW为0.002 5,相对较大. GNN-AG的RMSE进一步降低至0.000 294 61,MPIW显著缩小至0.002 5,体现了模型稳定性的提升. 其自适应门控图卷积机制通过动态学习最优空间依赖并过滤冗余连接,有效降低了噪声敏感性,优化了空间特征捕捉. GNN-FN的性能提升最为显著,MAE降至0.000 157 57,RMSE降至0.000 196 12,MPIW缩小至0.001 8. 该模型通过深度耦合与多尺度时空特征交互,增强了对复杂时空动态协同演化的整体建模能力,并产出更平滑、置信区间更窄的预测. MAGC-Trajectory的综合表现最优,MAE为0.000 135 89、RMSE为0.000 161 03、MPIW为0.001 9,均为最低值. 该模型集成前述优势,其中改进非线性学习层通过动态调整激活函数优化了非线性映射和拟合能力,有效抑制了特征融合波动及预测残余抖动,实现了高精度、高稳定性的轨迹预测.
表 3 消融模型指标对比
Tab.3
| 模型名称 | 2号塑料类轨迹 | |||
| MAE | RMSE | PICP | MPIW | |
| GNN | 0.000 360 70 | 0.000 637 35 | 1 | 0.003 2 |
| GNN-MS | 0.000 236 09 | 0.000 312 67 | 1 | 0.002 5 |
| GNN-AG | 0.000 235 99 | 0.000 294 61 | 1 | 0.002 5 |
| GNN-FN | 0.000 157 57 | 0.000 196 12 | 1 | 0.001 8 |
| MAGC-Trajectory | 0.000 135 89 | 0.000 161 03 | 1 | 0.001 9 |
2.4. 对比实验分析
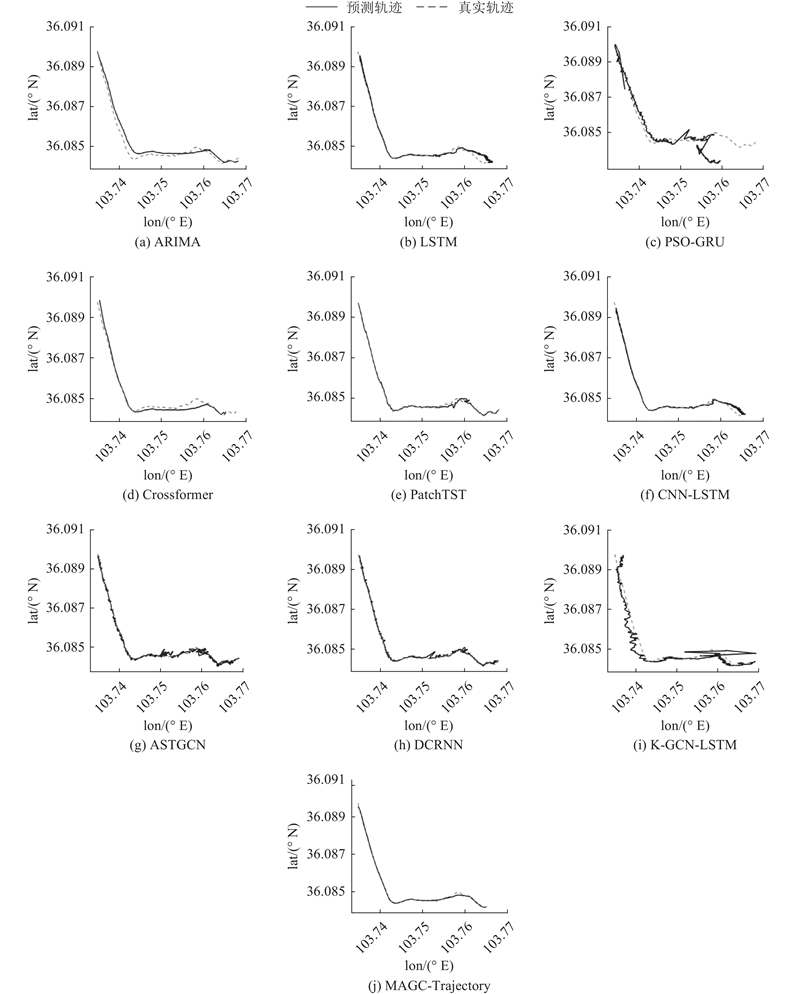
如图7所示为不同对比算法在轨迹6上的预测结果,其中,lat、lon分别为纬度、经度. 可以看出,PSO-GRU、K-GCN-LSTM整体上预测误差较大;ARIMA、LSTM、Crossformer能够大致把握垃圾漂移路径,预测较为准确;ASTGCN、DCRNN能够较好地拟合轨迹,但预测轨迹波动较大,不确定性较高;PatchTST、CNN-LSTM轨迹波动小,与真实轨迹基本吻合,但在轨迹弯折处误差较大;MAGC-Trajectory综合预测效果最优,基本拟合垃圾漂移路径,轨迹波动较小,轨迹弯折处误差较小.
图 7
如表4所示为不同对比算法的MAE与RMSE的对比. 分析表明,基于统计的预测模型ARIMA在预测轨迹上的MAE较高;LSTM能提取轨迹时间特征,然而缺乏时空联合建模,导致轨迹3上的MAE达到0.000 66,PSO-GRU在轨迹3上表现相对突出,其MAE达到0.000 27,但整体稳定性不足;Crossformer在轨迹6上表现良好,MAE达到0.000 67,但在轨迹5上误差偏大,MAE达到0.002 93;PatchTST通过分块式时间建模与单变量通道独立机制,在相对平滑的轨迹5上主动避免学习多因素特征间的复杂关联,从而精准捕捉单一维度的漂移趋势,取得MAE为0.000 227 43的最优结果;CNN-LSTM在轨迹3上预测表现良好,但因时空耦合不足,整体仍落后于图卷积方法;ASTGCN在轨迹4、轨迹6上表现较好,其MAE分别达到0.000 41和0.000 27,在轨迹5上表现中等,其MAE达到0.000 50,RMSE达到0.000 53;DCRNN利用编码-解码式扩散卷积,在轨迹3上仅次于MAGC-Trajectory,显示出优异的时空动态捕捉能力;MAGC-Trajectory在轨迹3、4、6上的预测性能较优,MAE分别为0.000 135 89、0.000 285 29,0.000 097 49,RMSE分别为0.000 161 03、0.000 331 46、0.000 131 98,整体优于其他对比模型,展示了MAGC-Trajectory在挖掘水漂垃圾复杂时空关联和多因素数据特征方面的优势.
表 4 不同对比算法的MAE与RMSE对比
Tab.4
| 模型 | 轨迹3(塑料) | 轨迹4(塑料) | 轨迹5(编织物) | 轨迹6(金属) | |||||||
| MAE | RMSE | MAE | RMSE | MAE | RMSE | MAE | RMSE | ||||
| ARIMA | 0.000 907 77 | 0.001 044 91 | 0.000 826 46 | 0.000 997 00 | 0.000 620 72 | 0.000 733 71 | 0.000 497 54 | 0.000 479 94 | |||
| LSTM | 0.000 664 18 | 0.000 377 46 | 0.000 526 43 | 0.000 475 12 | 0.000 610 72 | 0.000 714 91 | 0.000 581 39 | 0.000 892 69 | |||
| PSO-GRU | 0.000 268 66 | 0.000 303 53 | 0.001 282 10 | 0.001 528 82 | 0.001 282 58 | 0.001 788 72 | 0.002 556 01 | 0.004 059 56 | |||
| Crossformer | 0.000 855 28 | 0.001 124 09 | 0.001 844 85 | 0.003 029 05 | 0.002 930 03 | 0.005 488 65 | 0.000 665 45 | 0.001 058 63 | |||
| PatchTST | 0.000 235 04 | 0.000 339 29 | 0.000 357 85 | 0.000 382 01 | 0.000 227 43 | 0.000 325 60 | 0.000 268 74 | 0.000 431 20 | |||
| CNN-LSTM | 0.000 | 0.000 920 98 | 0.000 416 62 | 0.000 685 01 | 0.000 706 42 | 0.000 874 63 | 0.000 415 09 | 0.000 584 47 | |||
| ASTGCN | 0.000 285 36 | 0.000 304 84 | 0.000 406 33 | 0.000 628 63 | 0.000 502 94 | 0.000 529 85 | 0.000 270 92 | 0.000 346 26 | |||
| DCRNN | 0.000 196 31 | 0.000 242 67 | 0.000 426 84 | 0.000 605 68 | 0.000 322 17 | 0.000 288 78 | 0.000 151 10 | 0.000 212 69 | |||
| K-GCN-LSTM | 0.000 471 82 | 0.000 542 80 | 0.001 911 42 | 0.002 420 09 | 0.000 279 03 | 0.000 199 16 | 0.001 057 48 | 0.001 440 52 | |||
| MAGC-Trajectory | 0.000 135 89 | 0.000 161 03 | 0.000 285 29 | 0.000 331 46 | 0.000 241 92 | 0.000 251 92 | 0.000 097 49 | 0.000 131 98 | |||
2.5. 概率预测结果
MAGC-Trajectory对6条轨迹的预测结果如图8所示. 其中,1号纸类轨迹、3号、6号塑料类轨迹、5号编织类轨迹的置信区间较窄,2号、4号塑料类轨迹的置信区间较宽. 水漂垃圾漂移轨迹的概率预测结果能够量化垃圾未来轨迹的不确定性,为决策者提供更丰富的信息基础,从而使决策者可以做出更科学的治理措施.
图 8
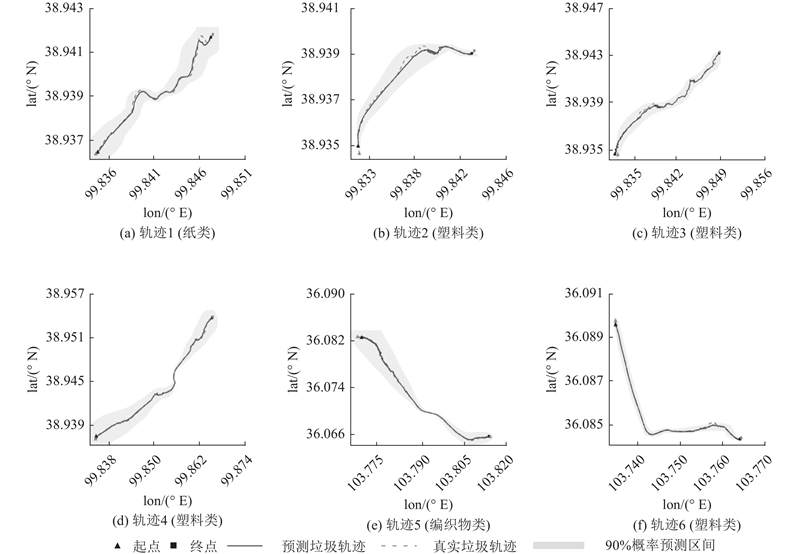
图 8 水漂垃圾轨迹概率预测结果
Fig.8 Water-floating garbage trajectory probability prediction results
3. 结 语
本研究提出基于多尺度自适应图卷积的水漂垃圾轨迹预测模型. 该模型针对水漂垃圾轨迹数据的时空异质性特性,利用门控机制动态融合预定义邻接矩阵与自适应学习矩阵,实现对轨迹节点间长短期时空依赖关系的协同建模. 构建多尺度图卷积网络模型,避免随着网络层数加深而出现的过平滑问题,同时将输入轨迹因素之间的空间特征高效地融合到多尺度时间特征中,形成完整的时空特征. 为了精确捕捉时空特征之间的非线性关系,设计改进非线性学习层,协调跨尺度时空特征的异构性,消除多源时空特征的冲突性干扰. 为了量化预测结果的不确定性,采用概率预测的方法,提供可能的垃圾分布位置,为捕捞者、决策者提供更丰富的信息支持.
在实验过程中发现,复杂运动轨迹会导致较宽的预测置信区间. 未来研究将重点突破多模态数据融合技术,建立跨模态时空特征对齐机制,实现更精确、置信区间更窄的预测方法,为水环境智慧治理提供全天候、多维度的技术支撑.
参考文献
三峡水库应急补水对2022年洪季长江口盐水入侵的影响
[J].DOI:10.11988/ckyyb.20240616 [本文引用: 1]
Impact of emergent water supply of the Three Gorges Reservoir on saltwater intrusion in the Changjiang River Estuary in 2022
[J].DOI:10.11988/ckyyb.20240616 [本文引用: 1]
星载GNSS-R检测太湖水华可行性分析
[J].
Analysis on feasibility of detecting water blooms in Taihu Lake with spaceborne GNSS-R
[J].
Hydrological reduction and control effect evaluation of sponge city construction based on one-way coupling model of SWMM-FVCOM: a case in university campus
[J].DOI:10.1016/j.jenvman.2023.119599 [本文引用: 1]
A new hybrid method for predicting univariate and multivariate time series based on pattern forecasting
[J].DOI:10.1016/j.ins.2021.12.001 [本文引用: 1]
基于统计特征搜索的多元时间序列预测方法
[J].DOI:10.11999/JEIT231264 [本文引用: 1]
Statistical feature-based search for multivariate time series forecasting
[J].DOI:10.11999/JEIT231264 [本文引用: 1]
Special issue on feature engineering editorial
[J].DOI:10.1007/s10994-021-06042-2 [本文引用: 1]
Fairness in machine learning: a survey
[J].
RNN-LSTM: from applications to modeling techniques and beyond: systematic review
[J].DOI:10.1016/j.jksuci.2024.102068 [本文引用: 1]
粒子群优化的门控循环单元网络漂流浮标轨迹预测
[J].DOI:10.11999/JEIT230945 [本文引用: 1]
Gated recurrent unit network of particle swarm optimization for drifting buoy trajectory prediction
[J].DOI:10.11999/JEIT230945 [本文引用: 1]
融合拼接注意力机制的船舶轨迹预测方法
[J].
Ship trajectory prediction method incorporating concatenated attention mechanism
[J].
A3T-GCN: attention temporal graph convolutional network for traffic forecasting
[J].DOI:10.3390/ijgi10070485 [本文引用: 1]
Adaptive dependency learning graph neural networks
[J].DOI:10.1016/j.ins.2022.12.086 [本文引用: 1]
Adaptive graph convolutional recurrent network for traffic forecasting
[J].
Graph neural networks: taxonomy, advances, and trends
[J].
Hierarchical spatio-temporal graph convolutional neural networks for traffic data imputation
[J].DOI:10.1016/j.inffus.2024.102292 [本文引用: 1]
STMGCN: mobile edge computing-empowered vessel trajectory prediction using spatio-temporal multigraph convolutional network
[J].DOI:10.1109/TII.2022.3165886 [本文引用: 1]
K-GCN-LSTM: a k-hop graph convolutional network and long-short-term memory for ship speed prediction
[J].DOI:10.1016/j.physa.2022.128107 [本文引用: 1]
Short-term load forecasting using channel and temporal attention based temporal convolutional network
[J].DOI:10.1016/j.jpgr.2021.107761 [本文引用: 1]
基于不确定性感知网络的可信机械故障诊断
[J].DOI:10.3901/JME.2024.12.194 [本文引用: 1]
Trustworthy mechanical fault diagnosis using uncertainty-aware network
[J].DOI:10.3901/JME.2024.12.194 [本文引用: 1]
A survey of graph neural networks for social recommender systems
[J].
Fully automatic CNN design with inception and ResNet blocks
[J].DOI:10.1007/s00521-022-07700-9 [本文引用: 1]
An improved near-surface velocity climatology for the global ocean from drifter observations
[J].DOI:10.1016/j.dsr.2017.04.009 [本文引用: 1]
Accurate and efficient daily carbon emission forecasting based on improved ARIMA
[J].DOI:10.1016/j.apenergy.2024.124232 [本文引用: 1]
Adaptive graph convolutional recurrent network for traffic forecasting
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}