

(1)纳入双偏振雷达变量作为输入,设计交叉注意力空频融合模块. 该模块通过约束不同偏振变量间的自相似性映射,能够增强模态间互补特征的交互与融合,从而有效提升了模型对降水微信息的表征与提取能力.
(2)采用端到端的学习框架,实现从双偏振雷达变量到地面实际降水的直接预测,避免了因经验性转换导致的累计误差.
(3)在NJU-CPOL数据集上开展的实验结果表明,提出的DPRF-UNet模型在不同降水强度阈值下的临界成功指数、Heidke技巧评分和命中率均优于主流方法,验证了该模型在临近降水预报任务中的有效性.
1. 研究数据与预处理
1.1. 研究数据
采用由南京大学制作的C波段双偏振天气雷达数据集(NJU-CPOL)[18],该数据集涵盖2014—2019年间共计258个降水过程. 该数据集对原始雷达数据进行了严格的质量控制[24],处理后的双偏振雷达数据被插值到不同等高面(1、3、7 km)的笛卡尔坐标系中. 数据以水平分辨率为1 km,时间分辨率为6 min,覆盖面积为256 km×256 km的三维双偏振雷达观测数据和降水格点数据的形式呈现. 由于3 km高度的等高平面位置指示器(constant altitude plan position indicator,CAPPI)数据能够较好地反映降水系统的主体结构和特征[25],使用3 km高度的CAPPI数据分析和预测降水特征.
1.2. 数据预处理
为了构建样本序列数据集,采用长度为20,步长为5的滑动窗口生成样本序列. 考虑到有雨和无雨的数据之间的高度不平衡问题,研究仿照Pan等[18]的做法,对数据集进行筛选,剔除部分“非雨样本”以保持数据的平衡性. 具体而言,在每个时间步长中,设定面积阈值
2. 研究方法
2.1. 问题描述和网络架构
任务定义为利用在当前时间之前1 h的双偏振雷达变量(
式中:
为了实现精准的降水预报,提出基于端到端的临近降水预报框架DPRF-UNet,旨在直接预测未来的降水. 具体架构如图1所示. 其中,
图 1
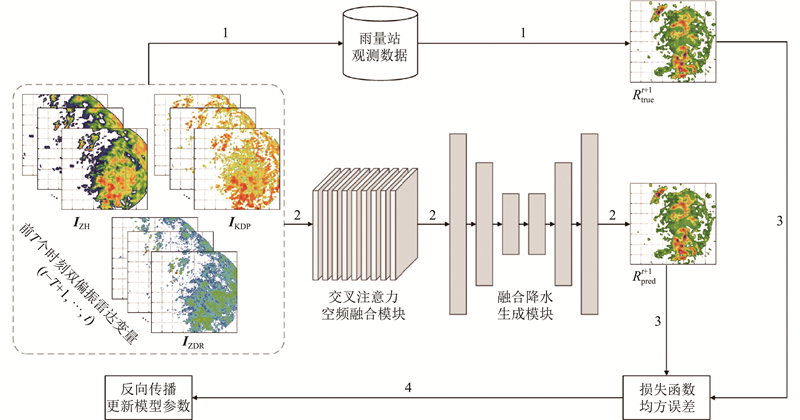
图 1 DPRF-UNet模型参数的优化过程示意图
Fig.1 Optimization process diagram of DPRF-UNet model parameter
该框架包含2个核心模块:交叉注意力空频融合模块和融合降水生成模块. 交叉注意力空频融合模块负责从多模态双偏振雷达数据(
2.2. 交叉注意力空频融合模块
为了高效融合双偏振雷达变量中所蕴含的降水微物理信息. 受Gu等[26]的启发,引入交叉注意力机制,增强特征融合阶段对模态间互补信息的利用能力. 该机制的核心思想是通过约束不同偏振变量间的自相似性映射,引导模型更加充分地利用不同模态之间的互补性特征. 如图2所示,利用卷积层将不同模态的特征
图 2
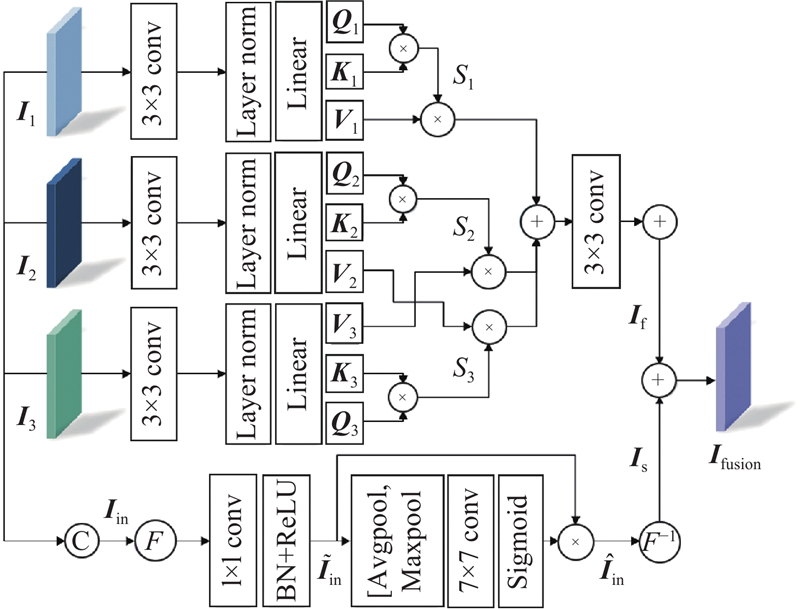
图 2 交叉注意力空频融合模块的示意图
Fig.2 Schematic diagram of cross-attention spatial-frequency fusion module
式中:
为了进一步提升多模态数据的融合效果,采用空间注意力机制自适应地增强频率信息,实现有效的信息增强. 如图2所示,将来自不同模态的特征
式中:
2.3. 融合降水生成模块
图 3

图 3 融合降水生成模块的示意图
Fig.3 Schematic diagram of integrated precipitation generation module
2.3.1. 多尺度注意力卷积模块
在经典UNet框架中,每层通常采用固定大小的卷积核进行特征编码和解码,但这种固定尺度的特征提取方式在捕获降水系统中尺度多样的空间分布方面存在一定的局限性. 基于多尺度卷积和软注意力选择策略来改进U型主干,增强模型对多尺度降水分布的建模能力. 如图4所示,该模块采用4个不同大小的卷积核并行提取多尺度降水特征
图 4
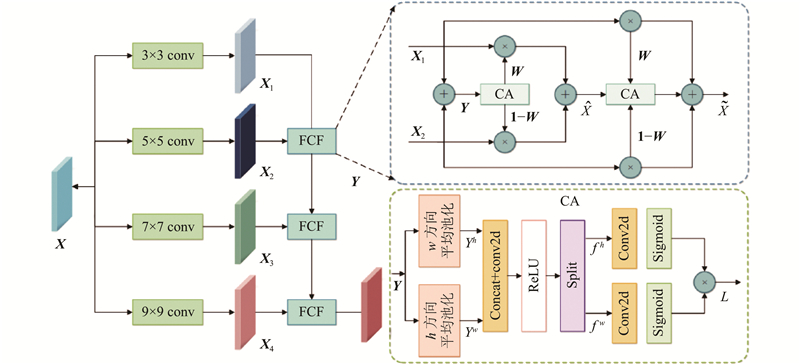
图 4 多尺度注意力卷积模块的示意图
Fig.4 Schematic diagram of multi-scale attention convolution module
式中:
2.3.2. 跨层融合模块
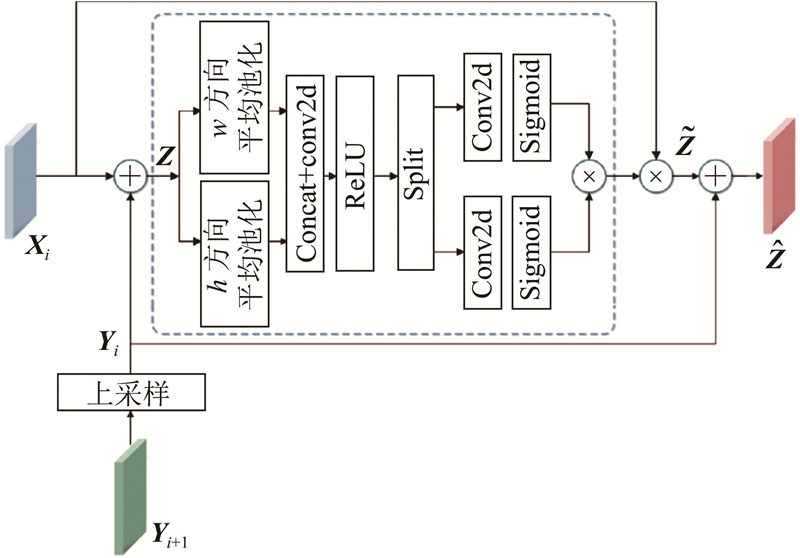
当处理小尺度降水时,由于小尺度降水具有较强的时间和空间不连续性,通过跳跃连接将编码器特征直接融合到解码器中. 若不加选择地融合,则可能会导致小尺度降水信息被“平滑”处理. 为了应对这一问题,提出跨层融合模块,旨在增强不同层级间的时空特征交互能力. 如图5所示,对解码器的特征上采样生成
图 5
3. 实验设置和评价指标
3.1. 实验设置
表 1 深度学习实验的硬件平台及软件环境
Tab.1
| 名称 | 环境配置 |
| 操作系统 | Ubuntu20.04 |
| 处理器 | Intel(R)Xeon(R)Gold6248CPU@2.50 GHz |
| 显卡 | Tesla A100 |
| CUDA版本 | 11.6 |
| 深度学习框架 | PyTorch1.13.0 |
| Python版本 | 3.9 |
| 显存 | 80 GB |
为了提升模型的泛化能力,在训练过程中,对所有的偏振雷达变量和降水量数据应用随机水平翻转、随机垂直翻转和随机旋转3种数据增强技术,增大训练数据的多样性.
3.2. 评估指标
在计算指标前,先设定降水阈值
表 2 NJU-CPOL数据集的降水强度分类统计
Tab.2
| R/(mm·(6 min)−1) | P/% | 降水等级 |
| [0, 0.5) | 75.86 | 无降雨 |
| [0.5, 5) | 13.98 | 小雨 |
| [5, 10) | 5.23 | 中雨 |
| [10, 30) | 3.93 | 大雨 |
| [30, + | 0.97 | 暴雨 |
4. 结果及分析
为了全面评估提出的DPRF-UNet模型性能,设计4组基线实验,分别为ZH_Rain(基于Ayzel等[12]提出的RainNet模型)、ZH_SmaAt(基于Trebing等[14]提出的SmaAt-UNet模型)、ZH_AATrans(基于Yang等[15]提出的AA-TransUNet模型)和ZH_Broad(基于Fernández等[16]提出的Broad-UNet模型),这些实验均以
为了深度评估模型在不同前置时间内的综合性能表现,对所有的临近降水预报模型开展不同前置时间(0.5、1和1.5 h)下的分时段预报实验. 由于数据集、评价指标及具体任务的差异,对比模型的预测结果与原始文献结果可能存在一定的差异.
4.1. 总体效果的评估
如表3~5所示分别为所有模型在不同前置时间(0.5、1和1.5 h)内的指标值. 其中,每列数据分别表示不同模型在3个降水强度阈值Rth下的CSI、HSS和POD的测试集样本平均值,加粗的数值表示在相应指标上取得最佳性能的模型结果. 在与4个基线模型的对比实验中,提出的DPRF-UNet模型在前置时间为0.5和1 h时表现出相对优势. 特别是在前置时间为0.5 h的预报实验中,该模型在不同级别降水阈值(小雨、中雨和大雨)下的CSI相对单变量模型(ZH_Rain、ZH_SmaAt、ZH_AATrans和ZH_Broad)性能的最优值分别提高了1.6%、4.1%和2.0%,平均提高了2.6%. HSS分别提高了1.5%、3.5%和3.0%,平均提高了2.7%. POD分别提高了−2.1%、4.2%和1.0%,平均提高了1.0%. 这些结果表明,DPRF-UNet模型在小雨、中雨和大雨的预报中均表现优异,尤其是在中雨和大雨的预报中,性能提升更显著. 尽管在小雨阈值下POD指标略有下降,但整体性能的提升证明了DPRF-UNet模型的优越性.
表 3 不同模型在0.5 h前置时间下的实验结果对比
Tab.3
| 模型 | CSI | HSS | POD | |||||||||||
| Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | |||
| ZH_Rain | ||||||||||||||
| ZH_SmaAt | ||||||||||||||
| ZH_AATrans | ||||||||||||||
| ZH_Broad | ||||||||||||||
| ZHKDP_DPRF | ||||||||||||||
| ZHZDR_DPRF | ||||||||||||||
| DPRF-UNet | ||||||||||||||
表 4 不同模型在1 h前置时间下的实验结果对比
Tab.4
| 模型 | CSI | HSS | POD | |||||||||||
| Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | |||
| ZH_Rain | ||||||||||||||
| ZH_SmaAt | ||||||||||||||
| ZH_AATrans | ||||||||||||||
| ZH_Broad | ||||||||||||||
| ZHKDP_DPRF | ||||||||||||||
| ZHZDR_DPRF | ||||||||||||||
| DPRF-UNet | ||||||||||||||
表 5 不同模型在1.5 h前置时间下的实验结果对比
Tab.5
| 模型 | CSI | HSS | POD | |||||||||||
| Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | |||
| ZH_Rain | ||||||||||||||
| ZH_SmaAt | ||||||||||||||
| ZH_AATrans | ||||||||||||||
| ZH_Broad | ||||||||||||||
| ZHKDP_DPRF | ||||||||||||||
| ZHZDR_DPRF | ||||||||||||||
| DPRF-UNet | ||||||||||||||
当前置时间为1 h时,提出的DPRF-UNet模型在所有级别降水阈值下的评价指标均达到最高值. 随着前置时间的延长,模型的预报性能没有持续提升,反而出现了显著的下降. 这一现象表明,DPRF-UNet模型在相对较短的前置时间内能够充分利用双偏振雷达数据的时空特征,实现对降水的高精度预报. 前置时间的增加虽然可以为降水预报提供更多的时间窗口,但过长的前置时间可能导致观测数据的不确定性增大,影响预报的准确性.
4.2. 敏感性试验
为了评估增加双偏振雷达变量对实际降水的拟合能力的提升效果,如图6所示为单变量模型和多变量模型(ZHKDP_DPRF、ZHZDR_DPRF和DPRF-UNet)在连续降水过程中的降水强度散点图. 可以看出,单变量模型的散点分布较离散,表明该模型对实际降水的拟合能力有限,而多变量模型的散点图不仅呈现出较集中的分布趋势,而且在预测精度上显著优于单变量模型. 以单变量模型中表现最佳的Broad-UNet为基准,多变量模型中表现最佳的ZHZDR_DPRF在MAE上降低了7.2%,达到0.89. ZHKDP_DPRF和DPRF-UNet的MAE分别降低了2.0%,达到0.94. 这些结果表明,引入双偏振雷达变量,显著提升了模型对降水强度的拟合能力,验证了增加双偏振雷达变量在降水预测中的有效性和鲁棒性.
图 6
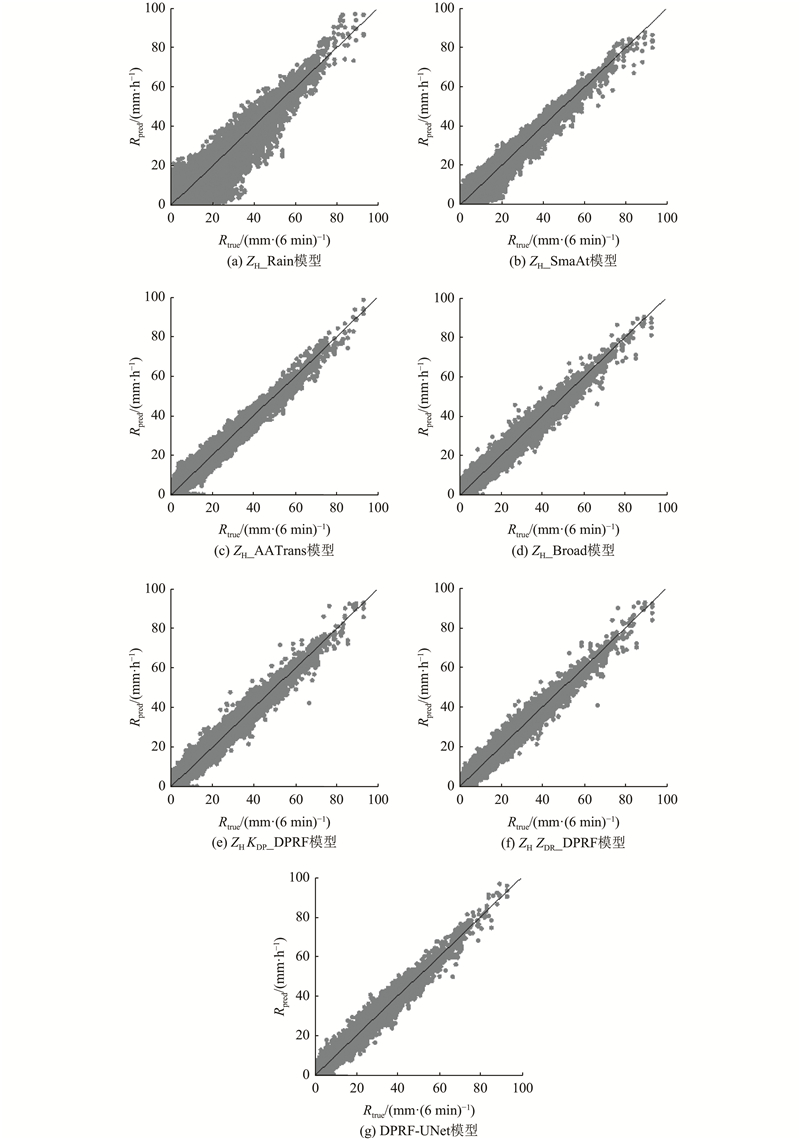
图 6 不同模型在连续降水过程中的预测散点图对比
Fig.6 Comparison of predictive scatterplot of different models in continuous precipitation process
4.3. 可视化结果
为了进一步展示提出模型的实际预报效果,随机选取并可视化了2个连续的极端暴雨降水过程. 如图7所示,单变量模型(ZH_Rain、ZH_SmaAt、ZH_AATrans和ZH_Broad)在不同前置时间tp内预测雨带形状、降水强度和落区时均出现了明显的偏差,相比之下,增加
图 7

图 7 不同前置时间下的模型预测可视化结果对比
Fig.7 Comparison of model prediction visualization result at different lead time
在另外一个降水过程中,模型表现出与前一过程相类似的预测特征. 如图8所示,单变量模型在不同的前置时间内对大范围的降水分布预报时,该模型的预测结果不仅存在较大的偏差和不确定性,而且无法准确地模拟大范围降水事件的落区和强度. 相反,增加
图 8

图 8 不同前置时间下的模型预测可视化结果对比
Fig.8 Comparison of model prediction visualization result at different lead time
4.4. 消融实验
为了评估提出的交叉注意力空频融合模块及跨层融合模块的有效性,对交叉注意力空频融合模块和跨层融合模块进行独立实验验证. 实验设置如下:将1 h前置时间下的DPRF-Unet预测结果作为基准(baseline). 采用简单的特征堆叠方式替代交叉注意力空频融合模块,构建DPRF-UNet-F模型. 采用简单的上采样(upsample)和特征堆叠替代跨层融合模块,构建DPRF-UNet-C模型. 从表6可知,与采用简单特征堆叠方式的DPRF-UNet-F模型相比,提出的交叉注意力空频融合模块在不同级别降水阈值下的CSI分别提升了2.5%、11.6%和10.2%,平均提高了8.1%. HSS分别提高了1.9%、8.1%和6.8%,平均提高了5.6%. POD分别提高了4.7%、15.5%和13.9%,平均提高了11.3%. 在跨层融合模块的对比实验中,与采用简单的上采样(upsample)和特征堆叠来替代跨层融合模块的DPRF-UNet-C相比,提出的跨层融合模块在不同级别降水阈值下的CSI分别提升了1.6%、3.0%和2.1%,平均提高了2.2%. HSS分别提高了1.3%、2.1%和1.5%,平均提高了1.6%. POD分别提高了0.4%、2.7%和2.0%,平均提高了1.7%.
表 6 1 h前置时间下的消融实验结果对比
Tab.6
| 模型 | CSI | HSS | POD | |||||||||||
| Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | Rth = 0.5 mm/ (6 min) | Rth = 5 mm/ (6 min) | Rth = 10 mm/ (6 min) | 平均值 | |||
| DPRF-UNet | ||||||||||||||
| DPRF-UNet-F | ||||||||||||||
| DPRF-UNet-C | ||||||||||||||
5. 结 语
本文利用双偏振雷达变量所提供的降水粒子微物理信息,构建多模态临近降水预报模型. 该模型采用端到端预报框架,避免了经验性转换带来的误差. 通过设计交叉注意力空频融合模块,模型能够充分挖掘双偏振雷达变量中的关键信息,提升了降水预测精度. 实验表明,该模型在不同降水强度下均表现出较高的预测准确性.
在实际应用中,雷达观测数据通常具有明显的空间异质性,可能对预报效果产生影响. 未来可在输入数据中引入更多与空间位置相关的信息,如雷达观测高度、方位角及地形因素,以进一步提高雷达降水预报精度.
参考文献
Skilful precipitation nowcasting using deep generative models of radar
[J].
基于深度学习改进数值天气预报模式和预报的研究及挑战
[J].
Advances and challenges for improving numerical weather prediction models and forecasting using deep learning
[J].
Nationwide radar-based precipitation nowcasting: a localization filtering approach and its application for Germany
[J].DOI:10.1109/JSTARS.2022.3144342 [本文引用: 1]
Optical flow models as an open benchmark for radar-based precipitation nowcasting (rainymotion v0.1)
[J].DOI:10.5194/gmd-12-1387-2019 [本文引用: 2]
雷暴与强对流临近天气预报技术进展
[J].
The advances in the nowcasting techniques on thunderstorms and severe convection
[J].
基于深度学习的天气雷达回波序列外推及效果分析
[J].
Extrapolation and effect analysis of weather radar echo sequence based on deep learning
[J].
基于深度学习的短临降水预报综述
[J].
A survey of precipitation nowcasting based on deep learning
[J].
DB-RNN: an RNN for precipitation nowcasting deblurring
[J].
RainNet v1.0: a convolutional neural network for radar-based precipitation nowcasting
[J].
SmaAt-UNet: precipitation nowcasting using a small attention-UNet architecture
[J].
Broad-UNet: multi-scale feature learning for nowcasting tasks
[J].
A case study on two differential reflectivity columns in a convective cell: phased-array radar observation and cloud model simulation
[J].
Improving nowcasting of convective development by incorporating polarimetric radar variables into a deep-learning model
[J].
Exploiting radar polarimetry for nowcasting thunderstorm hazards using deep learning
[J].
Polarimetric radar quantitative precipitation estimation
[J].
基于深度学习的融合降水临近预报方法及其在中国东部地区的应用研究
[J].
Research on fusion precipitation prediction method based on deep learning and its application in Eastern China
[J].
Estimation of extreme precipitation events in Estonia and Italy using dual-polarization weather radar quantitative precipitation estimations
[J].
Quantitative precipitation estimation with operational polarimetric radar measurements in Southern China: a differential phase–based variational approach
[J].
Adaptive spatial and frequency experts fusion network for medical image fusion
[J].
An algorithm for the machine calculation of complex Fourier series
[J].
Scale filtering for improved nowcasting performance in a high-resolution X-band radar network
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}