(11) $ \begin{split} {L_{{\mathrm{adv}}}} = &L_{{\mathrm{adv}}}^{\rm{BP}}(G,D_Y^{\rm{BP}},x,y)+L_{{\mathrm{adv}}}^{\rm{BP}}(F,D_X^{\rm{BP}},x,y)+ \\&L_{{\mathrm{adv}}}^{\rm{MP}}(F,D_Y^{\rm{MP}},x,y)+L_{{\mathrm{adv}}}^{\rm{MP}}(F,D_X^{\rm{MP}},x,y)+ \\ &L_{{\mathrm{adv}}}^{\rm{LP}}(F,D_Y^{\rm{LP}},x,y)+L_{{\mathrm{adv}}}^{\rm{LP}}(F,D_X^{\rm{LP}},x,y).\end{split} $
[1]
WHITCOMB L, YOERGER D R, SINGH H, et al. Advances in underwater robot vehicles for deep ocean exploration: navigation, control, and survey operations [C]// Robotics Research: the 9th International Symposium . London: Springer, 2000: 439−448.
[本文引用: 1]
[3]
FU X, ZHUANG P, HUANG Y, et al. A retinex-based enhancing approach for single underwater image [C]// IEEE International Conference on Image Processing . Paris: IEEE, 2014: 4572–4576.
[4]
PAN P, YUAN F, CHENG E Underwater image de-scattering and enhancing using dehazenet and HWD
[J]. Journal of Marine Science and Technology , 2018 , 26 (4 ): 6
[5]
SHEN L, REDA M, ZHANG X, et al Polarization-driven solution for mitigating scattering and uneven illumination in underwater imagery
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2024 , 62 : 4202615
[6]
MENG H, YAN Y, CAI C, et al A hybrid algorithm for underwater image restoration based on color correction and image sharpening
[J]. Multimedia Systems , 2022 , 28 (6 ): 1975 - 1985
DOI:10.1007/s00530-020-00693-2
[本文引用: 1]
[7]
PEREZ J, ATTANASIO A C, NECHYPORENKO N, et al. A deep learning approach for underwater image enhancement [C]// Biomedical Applications Based on Natural and Artificial Computing . Cham: Springer International Publishing, 2017: 183–192.
[本文引用: 1]
[8]
WEI D, XIE H, ZHANG Z, et al Learning a Holistic-Specific color transformer with Couple Contrastive constraints for underwater image enhancement and beyond
[J]. Journal of Visual Communication and Image Representation , 2024 , 98 : 104059
DOI:10.1016/j.jvcir.2024.104059
[本文引用: 1]
[9]
ZHANG T, LIU Y MTUW-GAN: a multi-teacher knowledge distillation generative adversarial network for underwater image enhancement
[J]. Applied Sciences , 2024 , 14 (2 ): 529
DOI:10.3390/app14020529
[本文引用: 1]
[10]
ANWAR S, LI C, PORIKLI F, et al. Deep underwater image enhancement [EB/OL]. [2024-03-02]. https://arxiv.org/abs/1807.03528v1.
[本文引用: 1]
[11]
LIANG D, CHU J, CUI Y, et al NPT-UL: an underwater image enhancement framework based on nonphysical transformation and unsupervised learning
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2024 , 62 : 5608819
[本文引用: 1]
[12]
LIU Q, ZHANG Q, LIU W, et al WSDS-GAN: a weak-strong dual supervised learning method for underwater image enhancement
[J]. Pattern Recognition , 2023 , 143 : 109774
DOI:10.1016/j.patcog.2023.109774
[本文引用: 1]
[13]
PARK J, HAN D K, KO H Adaptive weighted multi-discriminator CycleGAN for underwater image enhancement
[J]. Journal of Marine Science and Engineering , 2019 , 7 (7 ): 200
DOI:10.3390/jmse7070200
[本文引用: 1]
[14]
WANG H, ZHANG W, BAI L, et al Metalantis: a comprehensive underwater image enhancement framework
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2024 , 62 : 5618319
[本文引用: 1]
[15]
ZHU X, LIN M, ZHAO M, et al Adaptive underwater image enhancement based on color compensation and fusion
[J]. Signal, Image and Video Processing , 2023 , 17 (5 ): 2201 - 2210
DOI:10.1007/s11760-022-02435-5
[本文引用: 1]
[16]
HUANG Y, YUAN F, XIAO F, et al Underwater image enhancement based on zero-reference deep network
[J]. IEEE Journal of Oceanic Engineering , 2023 , 48 (3 ): 903 - 924
DOI:10.1109/JOE.2023.3245686
[本文引用: 1]
[17]
PARK C W, EOM I K Underwater image enhancement using adaptive standardization and normalization networks
[J]. Engineering Applications of Artificial Intelligence , 2024 , 127 : 107445
DOI:10.1016/j.engappai.2023.107445
[本文引用: 1]
[18]
GUAN F, LU S, LAI H, et al AUIE-GAN: adaptive underwater image enhancement based on generative adversarial networks
[J]. Journal of Marine Science and Engineering , 2023 , 11 (7 ): 1476
DOI:10.3390/jmse11071476
[本文引用: 1]
[19]
梁秀满, 赵治刚, 于海峰, 等 基于颜色线模型和多尺度融合的水下图像增强
[J]. 控制与决策 , 2025 , 40 (1 ): 162 - 169
[本文引用: 1]
LIANG Xiuman, ZHAO Zhigang, YU Haifeng, et al Underwater image enhancement based on color-line model and multi-scale fusion
[J]. Control and Decision , 2025 , 40 (1 ): 162 - 169
[本文引用: 1]
[20]
温佩芝, 陈君谋, 肖雁南, 等 基于生成式对抗网络和多级小波包卷积网络的水下图像增强算法
[J]. 浙江大学学报: 工学版 , 2022 , 56 (2 ): 213 - 224
[本文引用: 1]
WEN Peizhi, CHEN Junmou, XIAO Yannan, et al Underwater image enhancement algorithm based on GAN and multi-level wavelet CNN
[J]. Journal of Zhejiang University: Engineering Science , 2022 , 56 (2 ): 213 - 224
[本文引用: 1]
[21]
ZHONG Z, LIN Z Q, BIDART R, et al. Squeeze-and-attention networks for semantic segmentation [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 13065–13074.
[本文引用: 1]
[22]
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems , 2017, 30, 6000 – 6010.
[本文引用: 1]
[23]
JIANG Y, GONG X, LIU D, et al EnlightenGAN: deep light enhancement without paired supervision
[J]. IEEE Transactions on Image Processing , 2021 , 30 : 2340 - 2349
DOI:10.1109/TIP.2021.3051462
[本文引用: 1]
[24]
HU J, SHEN L, SUN G. Squeeze-and-excitation networks [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 7132–7141.
[本文引用: 1]
[25]
ZHU J Y, PARK T, ISOLA P, et al. Unpaired image-to-image translation using cycle-consistent adversarial networks [C]// IEEE International Conference on Computer Vision . Venice: IEEE, 2017: 2242–2251.
[本文引用: 2]
[26]
LI C, GUO J, GUO C Emerging from water: underwater image color correction based on weakly supervised color transfer
[J]. IEEE Signal Processing Letters , 2018 , 25 (3 ): 323 - 327
DOI:10.1109/LSP.2018.2792050
[本文引用: 1]
[27]
ISLAM M J, XIA Y, SATTAR J Fast underwater image enhancement for improved visual perception
[J]. IEEE Robotics and Automation Letters , 2020 , 5 (2 ): 3227 - 3234
DOI:10.1109/LRA.2020.2974710
[本文引用: 2]
[28]
LI C, GUO C, REN W, et al An underwater image enhancement benchmark dataset and beyond
[J]. IEEE Transactions on Image Processing , 2019 , 29 : 4376 - 4389
[本文引用: 1]
[29]
LI H, LI J, WANG W. A fusion adversarial underwater image enhancement network with a public test dataset [EB/OL]. [2024–03–02]. https://arxiv.org/abs/1906.06819v2.
[本文引用: 1]
[30]
ZUIDERVELD K. Contrast limited adaptive histogram equalization [M]// Graphics gems . Amsterdam: Elsevier, 1994: 474–485.
[本文引用: 1]
[31]
DREWS P JR, DO NASCIMENTO E, MORAES F, et al. Transmission estimation in underwater single images [C]// IEEE International Conference on Computer Vision Workshops . Sydney: IEEE, 2013: 825–830.
[本文引用: 1]
[32]
FU X, ZHUANG P, HUANG Y, et al. A retinex-based enhancing approach for single underwater image [C]// IEEE International Conference on Image Processing . Paris: IEEE, 2014: 4572–4576.
[本文引用: 1]
[33]
PENG Y T, COSMAN P C Underwater image restoration based on image blurriness and light absorption
[J]. IEEE Transactions on Image Processing , 2017 , 26 (4 ): 1579 - 1594
DOI:10.1109/TIP.2017.2663846
[本文引用: 1]
[34]
LIU S, FAN H, LIN S, et al Adaptive learning attention network for underwater image enhancement
[J]. IEEE Robotics and Automation Letters , 2022 , 7 (2 ): 5326 - 5333
DOI:10.1109/LRA.2022.3156176
[本文引用: 1]
[35]
GAO S, WU W, LI H, et al Atmospheric scattering model induced statistical characteristics estimation for underwater image restoration
[J]. IEEE Signal Processing Letters , 2023 , 30 : 658 - 662
DOI:10.1109/LSP.2023.3281255
[本文引用: 1]
1
... 水下图像处理对于水下航行器的检测、定位和导航等功能的实现具有至关重要的意义. 然而,水作为传输介质,其光学特性会给水下图像带来各种失真,光学失真严重影响水下航行器通过图像识别外界环境和目标物体[1 ] . 因此,提高水下图像的质量尤为重要. ...
A hybrid framework for underwater image enhancement
1
2020
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
Underwater image de-scattering and enhancing using dehazenet and HWD
0
2018
Polarization-driven solution for mitigating scattering and uneven illumination in underwater imagery
0
2024
A hybrid algorithm for underwater image restoration based on color correction and image sharpening
1
2022
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
1
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
Learning a Holistic-Specific color transformer with Couple Contrastive constraints for underwater image enhancement and beyond
1
2024
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
MTUW-GAN: a multi-teacher knowledge distillation generative adversarial network for underwater image enhancement
1
2024
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
1
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
NPT-UL: an underwater image enhancement framework based on nonphysical transformation and unsupervised learning
1
2024
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
WSDS-GAN: a weak-strong dual supervised learning method for underwater image enhancement
1
2023
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
Adaptive weighted multi-discriminator CycleGAN for underwater image enhancement
1
2019
... 传统的图像增强方法[2 -6 ] 在直接应用于图像增强时,往往表现出一定的局限性. 深度学习以其强大的分类性能和特征学习能力在图像处理中得到了广泛应用. Perez等[7 ] 创建了一个退化和清晰水下图像的配对数据集,并使用深度学习方法学习两者之间的映射关系,建立基于卷积神经网络的水下图像增强模型,实现了水下图像的增强,但是采用配对的数据集在多种场景的失真效果处理上效果不佳. Wei等[8 ] 提出基于视觉转换器(vision transformer)的新型整体特异性注意力(holistic-specific attention, HSA)机制. 这种机制能够更详细地捕获全局信息,并对水下图像进行初始增强,但是并未对有雾图像进行增强研究. Zhang等[9 ] 提出用于水下图像增强的多教学知识蒸馏 GAN(multi-teacher knowledge distillation GAN for underwater image enhancement, MTUW-GAN),此方法在视觉质量、模型参数和实时性能方面具有明显的优势,但算法中的学习模型难以有效地恢复各类失真图像. Anwar等[10 ] 使用室内环境合成水下图像作为CNN训练集,并使用建立的网络重建清晰的水下图像,但是其针对有雾图像的效果较差. Liang等[11 ] 提出基于对比学习和生成对抗网络(generative adversarial networks, GAN)的UL模型来增强输入水下图像,将对抗性损失、PatchNCE损失和身份损失这3个损失函数整合到网络中,以保证结构相似性和颜色真实性,能有效提高图像视觉质量,然而对于图像的对比度恢复能力较弱. Liu等[12 ] 考虑到水下图像的固有退化因素对于提高模型泛化性能至关重要,提出用于水下图像增强(UIE)的弱强双监督生成对抗网络(weak-strong dual supervised generative adversarial network, WSDS-GAN)以实现水下图像增强,但并未对蓝色以及彩色图像进行比较分析. Park等[13 ] 添加了一对基于Cyc1eGAN的判别器,该模型由2个生成器和4个鉴别器组成,在保留输入图像内容的同时实现图像增强,引入自适应加权方法来限制2个鉴别器的损失,但训练起来较困难,在处理绿色以及雾化图像时存在模糊情况. 上述方法针对特殊的失真情况偶尔有不错的效果,但是针对多种失真类型的水下图像来说,效果较一般. ...
Metalantis: a comprehensive underwater image enhancement framework
1
2024
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
Adaptive underwater image enhancement based on color compensation and fusion
1
2023
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
Underwater image enhancement based on zero-reference deep network
1
2023
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
Underwater image enhancement using adaptive standardization and normalization networks
1
2024
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
AUIE-GAN: adaptive underwater image enhancement based on generative adversarial networks
1
2023
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
基于颜色线模型和多尺度融合的水下图像增强
1
2025
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
基于颜色线模型和多尺度融合的水下图像增强
1
2025
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
基于生成式对抗网络和多级小波包卷积网络的水下图像增强算法
1
2022
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
基于生成式对抗网络和多级小波包卷积网络的水下图像增强算法
1
2022
... Wang等[14 ] 提出全面的水下图像增强框架用来处理各种水下场景,实验证明其能够解决水下图像中的低对比度和模糊细节的问题,但是针对颜色失真问题会增强过度,图像泛白. Zhu等[15 ] 提出基于色彩补偿和融合的自适应水下图像增强方法,能适应各种水下场景类型,然而,局部水域仍存在颜色失真现象. Huang等[16 ] 构建用于水下图像增强的新型零参考深度网络(Zero-UIE)消除对配对或未配对数据的要求,可以选择自适应色彩补偿来改善图像色彩,从而获得更高的视觉质量,其在亮度、色彩、对比度和自然度方面表现出不错的视觉表现,但在有雾的失真水下图像上较弱. Park等[17 ] 采用自适应标准化网络和归一化网络,提出基于机器学习的水下图像增强方案. 自适应标准化网络旨在纠正水下图像的失真分布,网络结构简单,参数量小. 所提出的方法在改善各类水下图像方面表现出不错的性能,但是在处理严重的色彩失真情况下的图像时,效果一般. Guan等[18 ] 设计了新的基于GAN的UIE任务网络结构,通过引入可训练的权重来平衡机制的效果,从而改变自注意力机制的学习,提高模型的自适应能力,也提高图像质量. 模型对不同风格图像的增强效果相对稳定,然而在RGB空间中拟合R通道时显示出问题,这导致一些结果出现红色偏差. 梁秀满等[19 ] 提出基于颜色线模型和多尺度融合的水下图像增强算法,有效处理了蓝绿色偏、雾化以及噪声问题,但是在处理雾化的图像时,存在模糊化情况,且并未对黄色失真图像进行分析. 温佩芝等[20 ] 针对水下图像成像模型提出基于生成式对抗网络和改进卷积神经网络的水下图像增强算法,克服了水下图像的雾模糊效应和色彩失真问题,但是其增强图像存在局部失真、色彩偏差的情况. ...
1
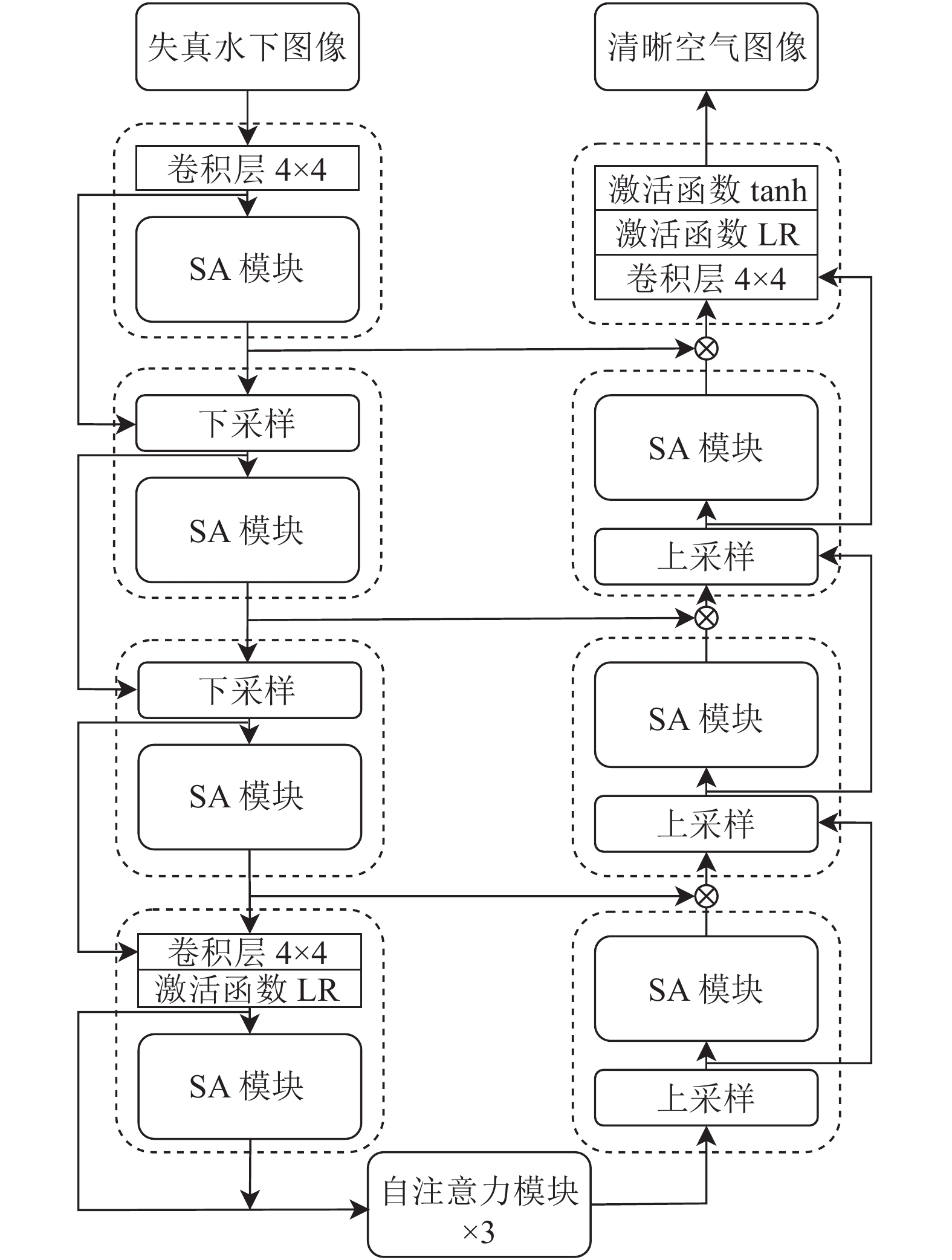
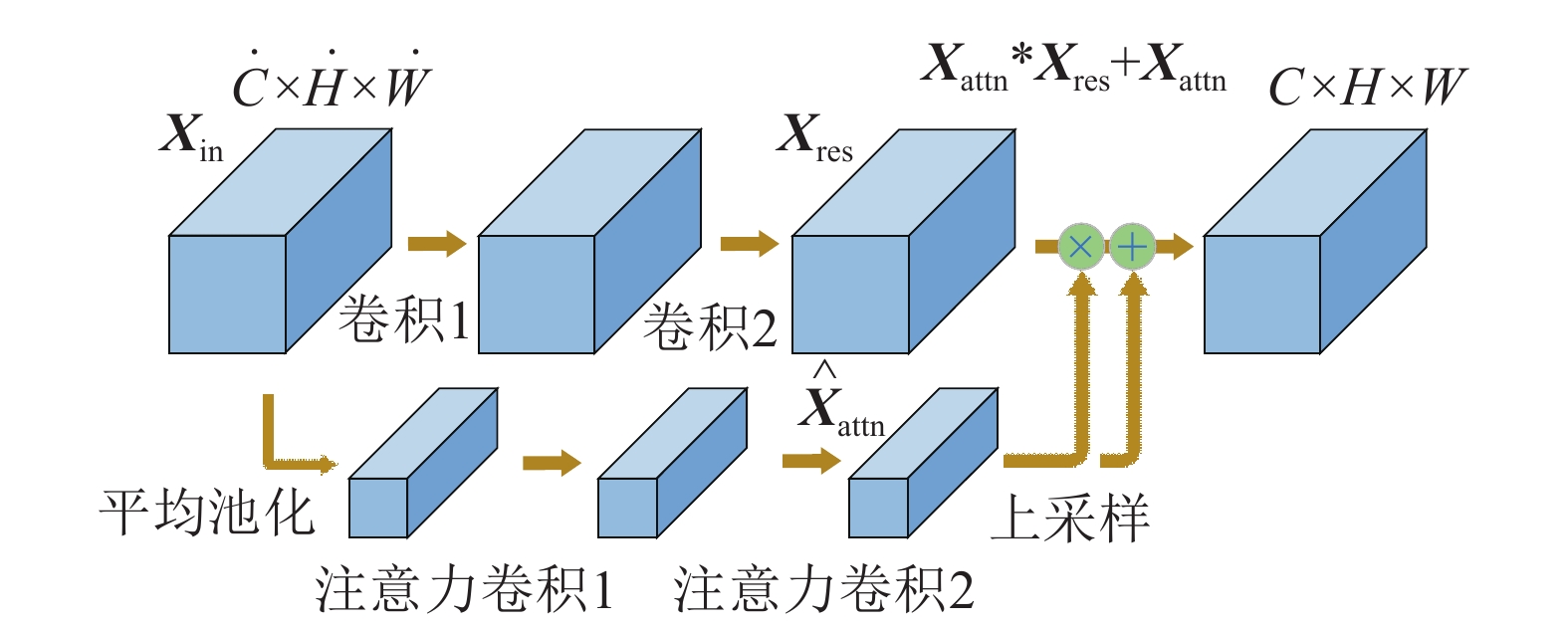
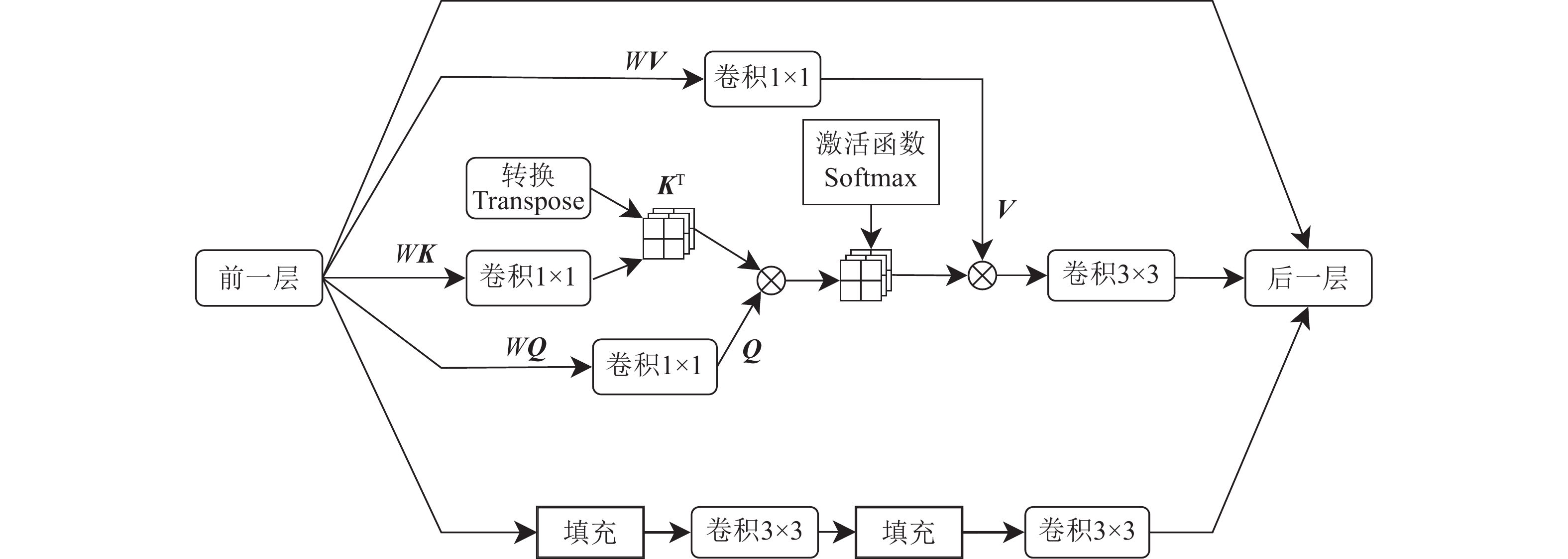
... 为了获取高质量的清晰的水下图像,MGCycleGAN的生成器采用编码器-解码器作为框架,如图2 所示,采用全局色彩校正机制来帮助生成器生成高质量的图像. 其由2个部分组成,挤压和注意(sequeeze-and-attention, SA)模块[21 ] 以及自注意力模块[22 ] . ...
1
... 为了获取高质量的清晰的水下图像,MGCycleGAN的生成器采用编码器-解码器作为框架,如图2 所示,采用全局色彩校正机制来帮助生成器生成高质量的图像. 其由2个部分组成,挤压和注意(sequeeze-and-attention, SA)模块[21 ] 以及自注意力模块[22 ] . ...
EnlightenGAN: deep light enhancement without paired supervision
1
2021
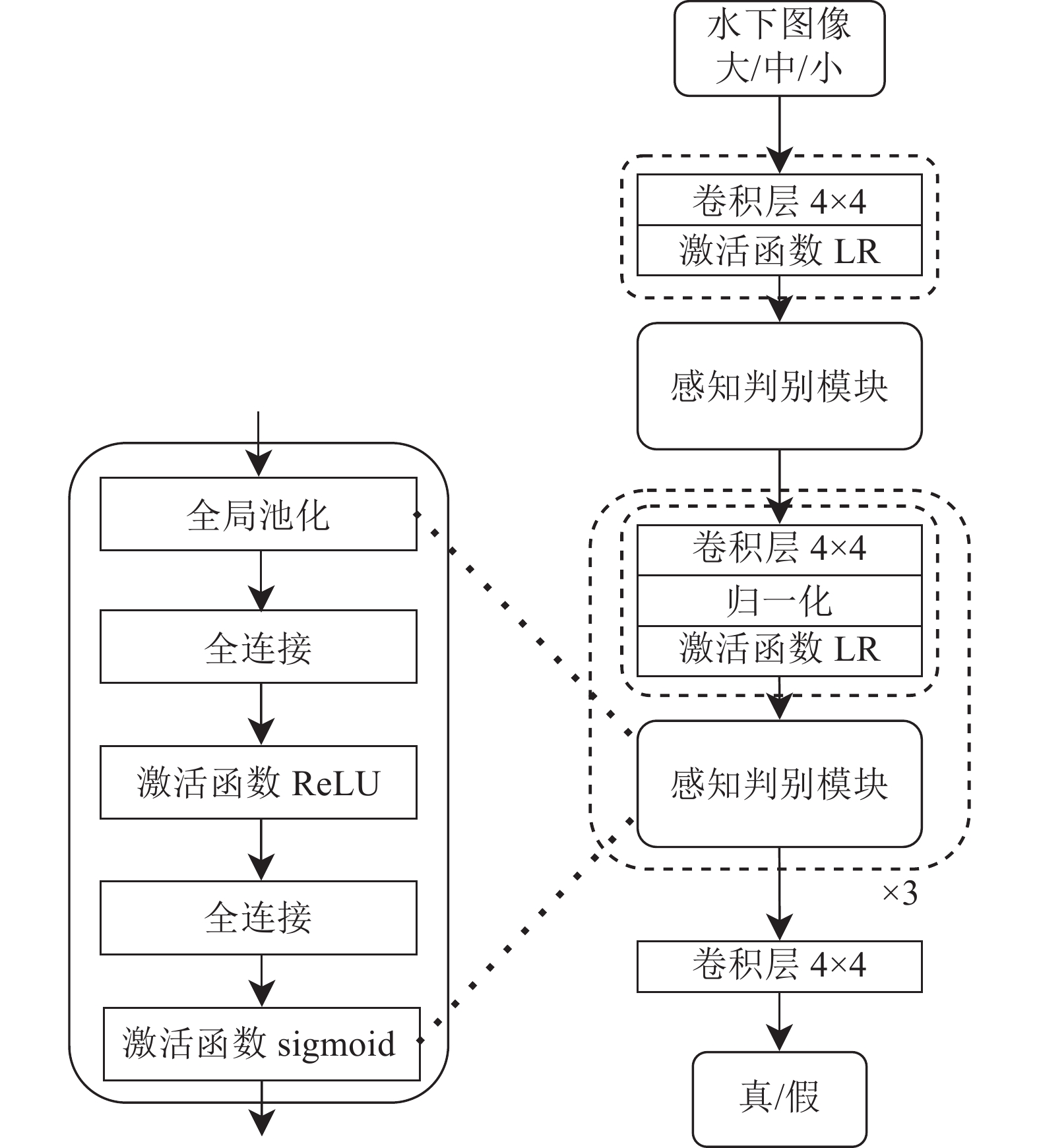
... 须对经过生成器处理后的多种失真情况的水下图像进行质量判别. PatchGAN作为CycleGAN的判别器,过于强调水下图像的局部细节,忽略整体一致性,导致生成器生成的图像容易产生伪影、失真的问题. 受到Jiang等[23 ] 的启发,使用全局鉴别器和局部判别器构成全局局部判别器,用来鉴别生成器的效果以及增强局部细节. 单独的全局和局部分支难以同时较好地捕捉多尺度信息且生成效果依赖数据集,全局局部视角对不同风格的水下失真图像不一定都效果显著,为此设计多维感知判别器,来促进不同尺度特征间的交互,从不同的视野出发对生成器生成的图像在不同维度的图像区域进行判别,从而更全面地获取水下图像细节. 同时,挤压激励(sequeeze-and-excitation, SE)注意力机制[24 ] 被添加至判别器中使得判别器对生成的水下图像的特征感知更加敏感,SE注意力机制可以动态地感知特征图中每个通道的重要性,使得判别器能够更加专注于真实图像和生成图像中最具区分性的特征. 这有助于提高判别器对真实图像和生成图像之间差异的感知能力,抑制噪声和伪影,更好地感知判别生成器生成的多种失真风格的水下图像. 多维感知判别器的综合结果如下: ...
1
... 须对经过生成器处理后的多种失真情况的水下图像进行质量判别. PatchGAN作为CycleGAN的判别器,过于强调水下图像的局部细节,忽略整体一致性,导致生成器生成的图像容易产生伪影、失真的问题. 受到Jiang等[23 ] 的启发,使用全局鉴别器和局部判别器构成全局局部判别器,用来鉴别生成器的效果以及增强局部细节. 单独的全局和局部分支难以同时较好地捕捉多尺度信息且生成效果依赖数据集,全局局部视角对不同风格的水下失真图像不一定都效果显著,为此设计多维感知判别器,来促进不同尺度特征间的交互,从不同的视野出发对生成器生成的图像在不同维度的图像区域进行判别,从而更全面地获取水下图像细节. 同时,挤压激励(sequeeze-and-excitation, SE)注意力机制[24 ] 被添加至判别器中使得判别器对生成的水下图像的特征感知更加敏感,SE注意力机制可以动态地感知特征图中每个通道的重要性,使得判别器能够更加专注于真实图像和生成图像中最具区分性的特征. 这有助于提高判别器对真实图像和生成图像之间差异的感知能力,抑制噪声和伪影,更好地感知判别生成器生成的多种失真风格的水下图像. 多维感知判别器的综合结果如下: ...
2
... 由于水下图像增强的结果往往具有颜色失真,利用身份映射损失[25 ] 保留输入和输出颜色的一致性,表达式如下: ...
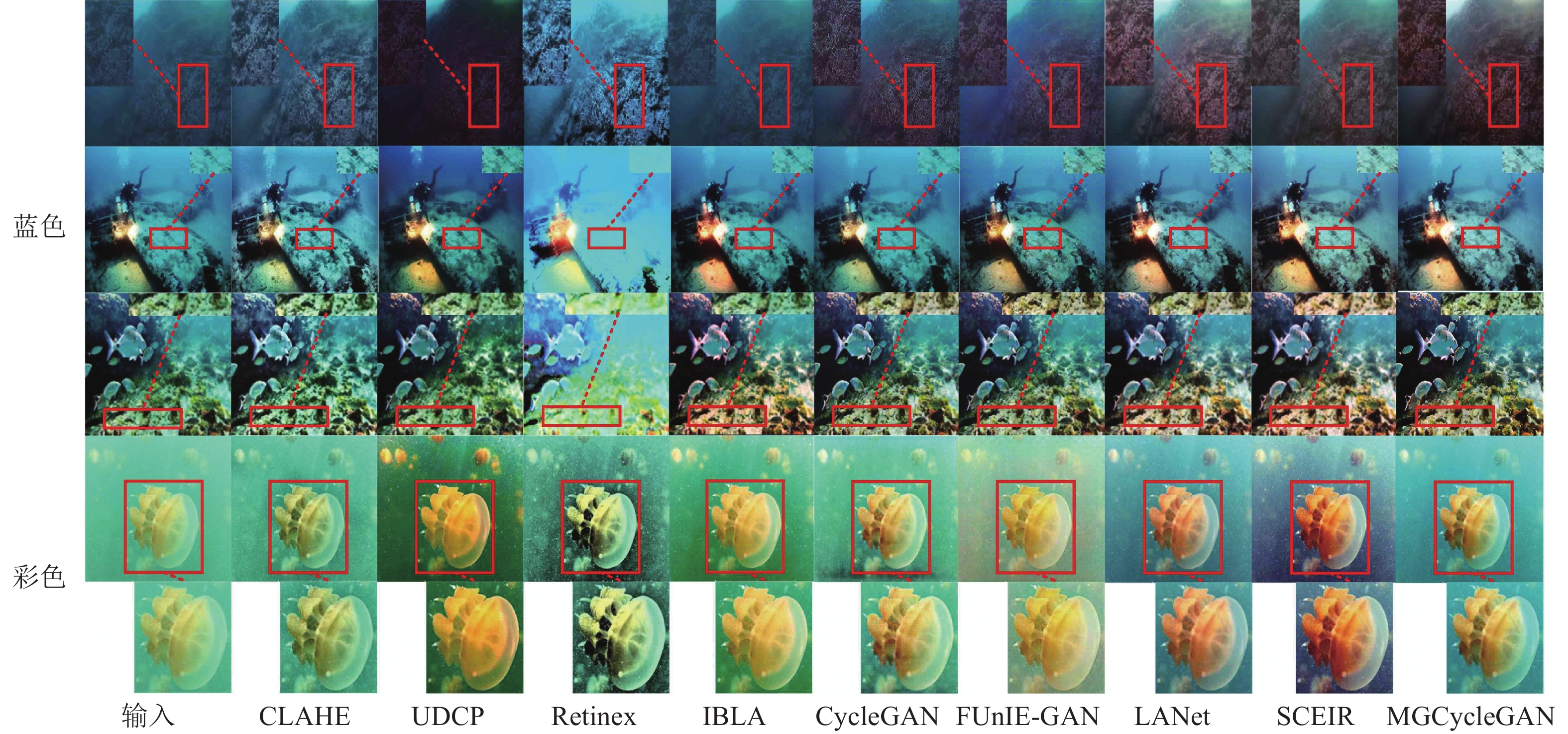
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
Emerging from water: underwater image color correction based on weakly supervised color transfer
1
2018
... 水下图像的像素与复原图像的像素之间存在显著相关性. 然而图像和循环重建图像之间的计算损失不足以恢复所有的结构信息,因为模糊图像大多损坏严重. 结构相似性(SSIM)考虑图像亮度、对比度和结构之间的相似性. 与传统的均方误差(MSE)和平均绝对误差(MAE)损失不同,SSIM[26 ] 能够更好地匹配人眼视觉系统对图像质量的感知. ...
Fast underwater image enhancement for improved visual perception
2
2020
... CycleGAN方法不需要配对的图像来训练,因此可以收集覆盖不同图像质量和内容的未配对训练集. 共选取6000 张非配对图像作为训练集,包括EUVP数据集[27 ] 5000 张和UIEB数据集[28 ] 1000 张,其中水下失真的图像是由UIEB数据集中的1000 张和EUVP数据集中的2000 张构成的,EUVP数据集另外的3000 张图像为清晰的水上图像. 输入至模型的图像可以是任何大小,不过,为了方便与其他算法比较,输入图像尺寸统一采用256×256. 数据集包括不同类型的失真图像,以便于增强模型的泛化性能. 为了测试模型效果,选择来自EUVP、UIEB中共500张不同类型的失真水下图像以及U45数据集[29 ] 来验证模型的泛化性能. ...
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
An underwater image enhancement benchmark dataset and beyond
1
2019
... CycleGAN方法不需要配对的图像来训练,因此可以收集覆盖不同图像质量和内容的未配对训练集. 共选取6000 张非配对图像作为训练集,包括EUVP数据集[27 ] 5000 张和UIEB数据集[28 ] 1000 张,其中水下失真的图像是由UIEB数据集中的1000 张和EUVP数据集中的2000 张构成的,EUVP数据集另外的3000 张图像为清晰的水上图像. 输入至模型的图像可以是任何大小,不过,为了方便与其他算法比较,输入图像尺寸统一采用256×256. 数据集包括不同类型的失真图像,以便于增强模型的泛化性能. 为了测试模型效果,选择来自EUVP、UIEB中共500张不同类型的失真水下图像以及U45数据集[29 ] 来验证模型的泛化性能. ...
1
... CycleGAN方法不需要配对的图像来训练,因此可以收集覆盖不同图像质量和内容的未配对训练集. 共选取6000 张非配对图像作为训练集,包括EUVP数据集[27 ] 5000 张和UIEB数据集[28 ] 1000 张,其中水下失真的图像是由UIEB数据集中的1000 张和EUVP数据集中的2000 张构成的,EUVP数据集另外的3000 张图像为清晰的水上图像. 输入至模型的图像可以是任何大小,不过,为了方便与其他算法比较,输入图像尺寸统一采用256×256. 数据集包括不同类型的失真图像,以便于增强模型的泛化性能. 为了测试模型效果,选择来自EUVP、UIEB中共500张不同类型的失真水下图像以及U45数据集[29 ] 来验证模型的泛化性能. ...
1
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
1
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
1
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
Underwater image restoration based on image blurriness and light absorption
1
2017
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
Adaptive learning attention network for underwater image enhancement
1
2022
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...
Atmospheric scattering model induced statistical characteristics estimation for underwater image restoration
1
2023
... 将提出的方法和其他几个算法在较严重的失真图像上进行比较. 为了验证模型针对多种失真水下图像的性能,随机选取多种风格的失真图像进行评估,结果如图6 、7 所示. 图中,第1列是失真的水下图像,第2列从左往右依次为CLAHE算法[30 ] 、UDCP算法[31 ] 、Retinex算法[32 ] 、IBLA算法[33 ] 、CycleGAN算法[25 ] 、FUnIE-GAN算法[27 ] 、LANet算法[34 ] 、SCEIR算法[35 ] 以及本研究提出的MGCycleGAN算法显示的结果. 为了保证实验数据具有可靠的对比性,用作对比的大部分深度学习的方法,使用与MGCycleGAN实验相同的训练集进行训练,得到可靠的训练模型参数而非原作者提供的训练模型参数来运行代码,以产生最佳结果. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}