[1]
JIANG J, LIU D, GU J, et al. What is the space of spectral sensitivity functions for digital color cameras? [C]// IEEE Workshop on Applications of Computer Vision . Clearwater Beach: 2013: 168–179.
[本文引用: 1]
[2]
RAMANATH R, SNYDER W E, YOO Y, et al Color image processing pipeline
[J]. IEEE Signal Processing Magazine , 2005 , 22 (1 ): 34 - 43
DOI:10.1109/MSP.2005.1407713
[本文引用: 1]
[3]
KARAIMER H C, BROWN M S. A software platform for manipulating the camera imaging pipeline [C]// Computer Vision–ECCV 2016: 14th European Conference . Amsterdam: Springer, 2016: 429–444.
[本文引用: 1]
[4]
GONG H, FINLAYSON G D, FISHER R B, et al 3D color homography model for photo-realistic color transfer re-coding
[J]. The Visual Computer , 2019 , 35 (3 ): 323 - 333
DOI:10.1007/s00371-017-1462-x
[本文引用: 5]
[5]
ANIRUDTH N, PRASAD B P, JAIN A, et al. Robust photometric alignment for asymmetric camera system [C]// IEEE International Conference on Consumer Electronics . Las Vegas: IEEE, 2018: 1–4.
[6]
OLIVEIRA M, SAPPA A D, SANTOS V. Unsupervised local color correction for coarsely registered images [C]// IEEE Conference on Computer Vision and Pattern Recognition . Colorado Springs: IEEE, 2011: 201–208.
[7]
WANG H, DAI L, ZHANG X. Consistent segmentation based color correction for coarsely registered images [C]// 2nd IAPR Asian Conference on Pattern Recognition . Naha: IEEE, 2013: 319–324.
[8]
CHISTOV E, ALUTIS N, VATOLIN D, et al. Color mismatches in stereoscopic video: real-world dataset and deep correction method [EB/OL]. (2023-06-15)[2024-2-22]. https://arxiv.org/abs/2303.06657.
[本文引用: 1]
[9]
TIAN Q C, COHEN L D. Color correction in image stitching using histogram specification and global mapping [C]// 6th International Conference on Image Processing Theory, Tools and Applications . Oulu: IEEE, 2016: 1–6.
[本文引用: 1]
[10]
DING C Q, MA Z Multi-camera color correction via hybrid histogram matching
[J]. IEEE Transactions on Circuits and Systems for Video Technology , 2021 , 31 (9 ): 3327 - 3337
DOI:10.1109/TCSVT.2020.3038484
[本文引用: 1]
[11]
HWANG Y, LEE J Y, KWEON I S, et al Probabilistic moving least squares with spatial constraints for nonlinear color transfer between images
[J]. Computer Vision and Image Understanding , 2019 , 180 : 1 - 12
DOI:10.1016/j.cviu.2018.11.001
[本文引用: 1]
[12]
LI Y, YIN H, YAO J, et al A unified probabilistic framework of robust and efficient color consistency correction for multiple images
[J]. Journal of Photogrammetry and Remote Sensing , 2022 , 190 : 1 - 24
DOI:10.1016/j.isprsjprs.2022.05.009
[13]
THANH O V, CANHAM T, VAZQUEZ-CORRAL J, et al. Color stabilization for multi-camera light-field imaging [C]// 2020 IEEE International Conference on Acoustics, Speech and Signal Processing . Barcelona: IEEE, 2020: 2148–2152.
[14]
GIL RODRÍGUEZ R, VAZQUEZ-CORRAL J, BERTALMÍO M Color matching images with unknown non-linear encodings
[J]. IEEE Transactions on Image Processing , 2020 , 29 : 4435 - 4444
DOI:10.1109/TIP.2020.2968766
[15]
OSKARSSON M. Robust image-to-image color transfer using optimal inlier maximization [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 786–795.
[本文引用: 1]
[16]
ZHAO Y F, FERGUSON S, ZHOU H Y, et al Color alignment for relative color constancy via non-standard references
[J]. IEEE Transactions on Image Processing , 2022 , 31 : 6591 - 6604
DOI:10.1109/TIP.2022.3214107
[本文引用: 5]
[17]
BARBERO-ÁLVAREZ M A, MENÉNDEZ J M, RODRIGO J A An adaptive colour calibration for crowdsourced images in heritage preservation science
[J]. IEEE Access , 2020 , 8 : 185093 - 185111
DOI:10.1109/ACCESS.2020.3017390
[本文引用: 2]
[18]
FANG F, GONG H, MACKIEWICZ M, et al. Colour correction toolbox [C]// Proceedings of 13th AIC Congress . Jeju: Korea Society of Color Studies, 2017: 13–18.
[本文引用: 2]
[19]
ZHAO S, LIU L, FENG Z, et al Colorimetric characterization of color imaging system based on kernel partial least squares
[J]. Sensors , 2023 , 23 (12 ): 5706
DOI:10.3390/s23125706
[21]
NGUYEN H M R, PRASAD D K, BROWN M S. Raw-to-raw: mapping between image sensor color responses [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Columbus: IEEE, 2014: 3398–3405.
[本文引用: 9]
[22]
AFIFI M, ABUOLAIM A. Semi-supervised raw-to-raw mapping [EB/OL]. (2021-09-06)[2023-12-20]. https://arxiv.org/abs/2106.13883.
[本文引用: 2]
[23]
KARAIMER H C, BROWN M S. Improving color reproduction accuracy on cameras [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 6440–6449.
[本文引用: 1]
[24]
ROBERTSON A R Computation of correlated color temperature and distribution temperature
[J]. Journal of the Optical Society of America , 1968 , 58 (11 ): 1528 - 1535
DOI:10.1364/JOSA.58.001528
[本文引用: 1]
[25]
BAXTER D, ROYER M, SMET K Modifications of the Robertson method for calculating correlated color temperature to improve accuracy and speed
[J]. Leukos , 2024 , 20 (1 ): 55 - 66
DOI:10.1080/15502724.2023.2166060
[本文引用: 1]
[26]
ZHANG F Z, XU H S, WANG Z H Spectral design methods for multi-channel LED light sources based on differential evolution
[J]. Applied optics , 2016 , 55 (28 ): 7771 - 7781
DOI:10.1364/AO.55.007771
[本文引用: 1]
[28]
International Electrotechnical Commission. Multimedia systems and equipment-Color measurement and management-Part 2-1[S]. Color management-Default RGB color space-sRGB, 1999.
[本文引用: 1]
1
... 随着成像技术的不断发展,多种先进成像设备应运而生,并在诸多领域得到了广泛应用. 尽管现代数码相机在图像质量方面已取得显著的进步,但跨相机颜色不一致的问题仍然是一个亟待解决的挑战. 特别是在颜色恒常性领域的数据增强和多相机系统的多视角图像融合应用中,不同相机之间颜色保持一致显得至关重要. 由于相机采用的光学镜头、传感器光谱灵敏度[1 ] 以及内置图像信号处理 (image signal processing, ISP) 模块[2 -3 ] 存在差异,使用不同相机拍摄的相同场景图像会呈现出不同的原始响应值,从而导致不一致的图像颜色外观. ...
Color image processing pipeline
1
2005
... 随着成像技术的不断发展,多种先进成像设备应运而生,并在诸多领域得到了广泛应用. 尽管现代数码相机在图像质量方面已取得显著的进步,但跨相机颜色不一致的问题仍然是一个亟待解决的挑战. 特别是在颜色恒常性领域的数据增强和多相机系统的多视角图像融合应用中,不同相机之间颜色保持一致显得至关重要. 由于相机采用的光学镜头、传感器光谱灵敏度[1 ] 以及内置图像信号处理 (image signal processing, ISP) 模块[2 -3 ] 存在差异,使用不同相机拍摄的相同场景图像会呈现出不同的原始响应值,从而导致不一致的图像颜色外观. ...
1
... 随着成像技术的不断发展,多种先进成像设备应运而生,并在诸多领域得到了广泛应用. 尽管现代数码相机在图像质量方面已取得显著的进步,但跨相机颜色不一致的问题仍然是一个亟待解决的挑战. 特别是在颜色恒常性领域的数据增强和多相机系统的多视角图像融合应用中,不同相机之间颜色保持一致显得至关重要. 由于相机采用的光学镜头、传感器光谱灵敏度[1 ] 以及内置图像信号处理 (image signal processing, ISP) 模块[2 -3 ] 存在差异,使用不同相机拍摄的相同场景图像会呈现出不同的原始响应值,从而导致不一致的图像颜色外观. ...
3D color homography model for photo-realistic color transfer re-coding
5
2019
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
... [4 -8 ]. 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
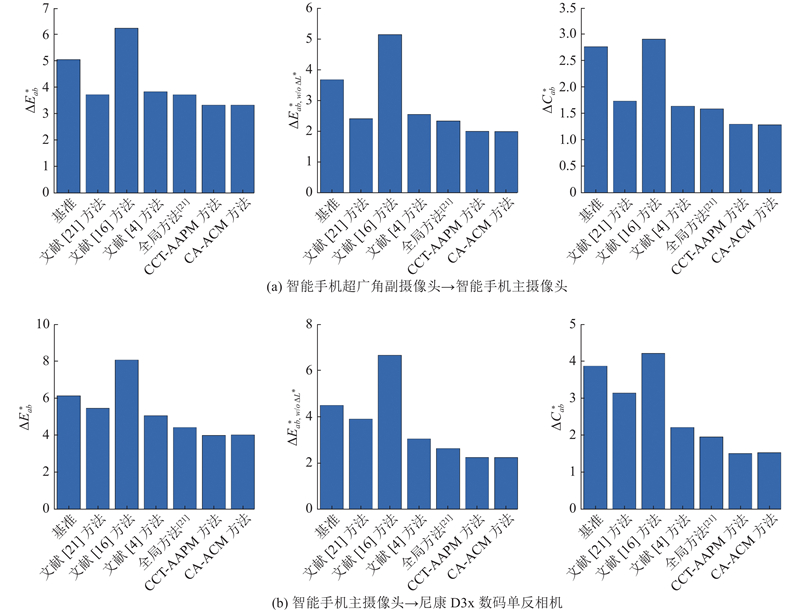
... 以2台相机未应用颜色一致性算法时图像间色卡区域的颜色差异作为基准,对本研究所提算法、文献[4 ]所提方法、文献[16 ]所提方法、文献[21 ]所提方法以及全局方法[21 ] 进行比较. 如表2 所示显示了3台相机在4种照明类别下的颜色一致性评价结果,其中,粗体和下划线表示最优结果和次优结果. 结果表明,本研究所提的2种算法均表现出较优的性能. 文献[21 ]所提方法由于依赖于2个变换函数,存在增加累积转换误差的风险,因此其性能较差且不稳定. 而传统的全局方法也有其局限性,难以兼顾与适应所有任意照明条件下的场景,因为它使用了基于组合所有光源的通用矩阵. 文献[16 ]所提方法由于对颜色的亮度和色度采取了较为简单的线性匹配策略,而在某些场景下表现不佳,故而对于场景的多样性和复杂性缺乏良好的适应性. 如图5 所示展示了所有照明条件下的平均颜色差异情况. 可以看出,所提算法在总体上表现更佳. 平均不含明度差的色差和平均彩度差均低于平均色差,反映了它们更多关注于色品成分的差异. 在平均彩度差方面,与基准相比,所提算法能够将智能手机主副摄之间的平均$\Delta C_{ab}^*$ $\Delta C_{ab}^*$
... Color consistency results of four illumination conditions for mapping among three cameras
Tab.2 算法 LED 日光 荧光灯 钨丝灯 $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ 智能手机超广角副摄像 基准 4.78 3.68 2.66 6.91 4.72 4.18 4.76 3.18 2.25 4.60 3.33 2.44 文献[21 ] 3.61 2.58 1.83 5.05 2.77 2.26 3.27 1.71 1.17 3.41 2.24 1.58 文献[16 ] 6.52 5.75 3.31 5.71 3.48 1.98 4.57 3.25 1.85 6.65 5.74 3.17 文献[4 ] 4.17 3.06 2.00 4.42 2.57 1.57 3.36 2.02 1.33 3.22 1.97 1.28 全局方法[21 ] 3.65 2.56 1.74 4.64 2.31 1.62 3.42 1.80 1.19 3.51 2.23 1.53 CCT-AAPM 3.26 2.22 1.47 4.28 2.04 1.32 3.26 1.62 1.07 3.00 1.80 1.14 CA-ACM 3.33 2.25 1.49 4.05 1.90 1.17 3.34 1.70 1.15 2.97 1.77 1.12 智能手机主摄像头 → 基准 5.59 4.07 3.24 4.04 2.66 2.13 7.88 5.82 5.61 9.31 7.41 6.91 文献[21 ] 5.37 4.09 3.19 5.05 4.03 3.51 5.18 2.41 1.96 6.79 4.89 3.84 文献[16 ] 6.90 5.46 3.49 6.00 4.81 2.98 11.39 10.03 6.36 11.76 10.12 6.36 文献[4 ] 5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60
图 5 3台相机间所有测试图像的平均颜色差异结果 ...
... 文献[
4 ]
5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60 图 5 3台相机间所有测试图像的平均颜色差异结果 ...
1
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
1
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
Multi-camera color correction via hybrid histogram matching
1
2021
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
Probabilistic moving least squares with spatial constraints for nonlinear color transfer between images
1
2019
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
A unified probabilistic framework of robust and efficient color consistency correction for multiple images
0
2022
Color matching images with unknown non-linear encodings
0
2020
1
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
Color alignment for relative color constancy via non-standard references
5
2022
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
... 以2台相机未应用颜色一致性算法时图像间色卡区域的颜色差异作为基准,对本研究所提算法、文献[4 ]所提方法、文献[16 ]所提方法、文献[21 ]所提方法以及全局方法[21 ] 进行比较. 如表2 所示显示了3台相机在4种照明类别下的颜色一致性评价结果,其中,粗体和下划线表示最优结果和次优结果. 结果表明,本研究所提的2种算法均表现出较优的性能. 文献[21 ]所提方法由于依赖于2个变换函数,存在增加累积转换误差的风险,因此其性能较差且不稳定. 而传统的全局方法也有其局限性,难以兼顾与适应所有任意照明条件下的场景,因为它使用了基于组合所有光源的通用矩阵. 文献[16 ]所提方法由于对颜色的亮度和色度采取了较为简单的线性匹配策略,而在某些场景下表现不佳,故而对于场景的多样性和复杂性缺乏良好的适应性. 如图5 所示展示了所有照明条件下的平均颜色差异情况. 可以看出,所提算法在总体上表现更佳. 平均不含明度差的色差和平均彩度差均低于平均色差,反映了它们更多关注于色品成分的差异. 在平均彩度差方面,与基准相比,所提算法能够将智能手机主副摄之间的平均$\Delta C_{ab}^*$ $\Delta C_{ab}^*$
... ]所提方法由于依赖于2个变换函数,存在增加累积转换误差的风险,因此其性能较差且不稳定. 而传统的全局方法也有其局限性,难以兼顾与适应所有任意照明条件下的场景,因为它使用了基于组合所有光源的通用矩阵. 文献[16 ]所提方法由于对颜色的亮度和色度采取了较为简单的线性匹配策略,而在某些场景下表现不佳,故而对于场景的多样性和复杂性缺乏良好的适应性. 如图5 所示展示了所有照明条件下的平均颜色差异情况. 可以看出,所提算法在总体上表现更佳. 平均不含明度差的色差和平均彩度差均低于平均色差,反映了它们更多关注于色品成分的差异. 在平均彩度差方面,与基准相比,所提算法能够将智能手机主副摄之间的平均$\Delta C_{ab}^*$ $\Delta C_{ab}^*$
... Color consistency results of four illumination conditions for mapping among three cameras
Tab.2 算法 LED 日光 荧光灯 钨丝灯 $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ 智能手机超广角副摄像 基准 4.78 3.68 2.66 6.91 4.72 4.18 4.76 3.18 2.25 4.60 3.33 2.44 文献[21 ] 3.61 2.58 1.83 5.05 2.77 2.26 3.27 1.71 1.17 3.41 2.24 1.58 文献[16 ] 6.52 5.75 3.31 5.71 3.48 1.98 4.57 3.25 1.85 6.65 5.74 3.17 文献[4 ] 4.17 3.06 2.00 4.42 2.57 1.57 3.36 2.02 1.33 3.22 1.97 1.28 全局方法[21 ] 3.65 2.56 1.74 4.64 2.31 1.62 3.42 1.80 1.19 3.51 2.23 1.53 CCT-AAPM 3.26 2.22 1.47 4.28 2.04 1.32 3.26 1.62 1.07 3.00 1.80 1.14 CA-ACM 3.33 2.25 1.49 4.05 1.90 1.17 3.34 1.70 1.15 2.97 1.77 1.12 智能手机主摄像头 → 基准 5.59 4.07 3.24 4.04 2.66 2.13 7.88 5.82 5.61 9.31 7.41 6.91 文献[21 ] 5.37 4.09 3.19 5.05 4.03 3.51 5.18 2.41 1.96 6.79 4.89 3.84 文献[16 ] 6.90 5.46 3.49 6.00 4.81 2.98 11.39 10.03 6.36 11.76 10.12 6.36 文献[4 ] 5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60
图 5 3台相机间所有测试图像的平均颜色差异结果 ...
... 文献[
16 ]
6.90 5.46 3.49 6.00 4.81 2.98 11.39 10.03 6.36 11.76 10.12 6.36 文献[4 ] 5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60 图 5 3台相机间所有测试图像的平均颜色差异结果 ...
An adaptive colour calibration for crowdsourced images in heritage preservation science
2
2020
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
... -17 ],以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
2
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
... [18 -20 ]. 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
Colorimetric characterization of color imaging system based on kernel partial least squares
0
2023
A color calibration method between different digital cameras
1
2016
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
9
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
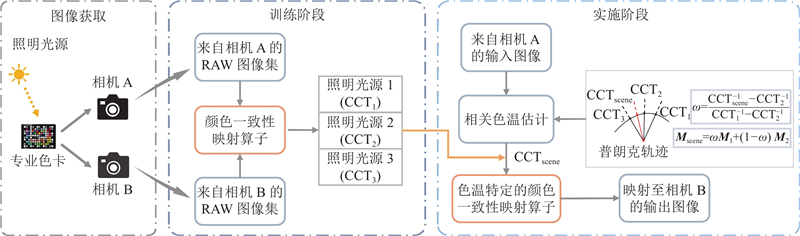
... 受到改进的色度映射过程启发[23 ] ,提出色温感知的自适应分区映射(correlated-color-temperatures-aware adaptive partitioning mapping, CCT-AAPM)算法. 相关色温作为照明光源的重要参数之一,对人眼视觉所观察到的照明颜色特性起着决定性作用. CCT-AAPM算法的核心在于采用了精细化的相关色温范围分割策略,充分考虑了不同色温光源对色彩感知的重要影响. 通过将相关色温范围进行细致划分,并为特定的色温节点设计专门的色彩映射算子,本算法实现了场景特定的RAW至RAW的精确映射,从而显著提高了在各种光照条件下的颜色一致性. 传统方法,如Nguyen等[21 ] 描述的全局方法,通常仅依赖于一个单一的、适用于所有现实世界场景的转换机制,因此在改善颜色一致性方面存在局限. 相较之下,CCT-AAPM算法通过其独到的光源感知分区映射策略,能够动态适应多种不同的照明环境. 如图1 所示,该算法的总体框架包括训练和实施2个阶段. 在多种可控照明条件下,采用3台相机对X-Rite ColorChecker Digital SG色卡进行拍摄,分别针对关键色温分段点构建相应的颜色一致性映射算子. 通过这些在不同照明条件下获得的色卡图像,能够确保推导出的颜色一致性映射算子的鲁棒性和普适性,从而显著提升CCT-AAPM算法的整体性能. 将最大限度地降低2台相机在RAW域RGB响应值的色度残差设定为优化目标,以达到近似推导出最佳映射算子的目的,表达式如下: ...
... 以2台相机未应用颜色一致性算法时图像间色卡区域的颜色差异作为基准,对本研究所提算法、文献[4 ]所提方法、文献[16 ]所提方法、文献[21 ]所提方法以及全局方法[21 ] 进行比较. 如表2 所示显示了3台相机在4种照明类别下的颜色一致性评价结果,其中,粗体和下划线表示最优结果和次优结果. 结果表明,本研究所提的2种算法均表现出较优的性能. 文献[21 ]所提方法由于依赖于2个变换函数,存在增加累积转换误差的风险,因此其性能较差且不稳定. 而传统的全局方法也有其局限性,难以兼顾与适应所有任意照明条件下的场景,因为它使用了基于组合所有光源的通用矩阵. 文献[16 ]所提方法由于对颜色的亮度和色度采取了较为简单的线性匹配策略,而在某些场景下表现不佳,故而对于场景的多样性和复杂性缺乏良好的适应性. 如图5 所示展示了所有照明条件下的平均颜色差异情况. 可以看出,所提算法在总体上表现更佳. 平均不含明度差的色差和平均彩度差均低于平均色差,反映了它们更多关注于色品成分的差异. 在平均彩度差方面,与基准相比,所提算法能够将智能手机主副摄之间的平均$\Delta C_{ab}^*$ $\Delta C_{ab}^*$
... [21 ]进行比较. 如表2 所示显示了3台相机在4种照明类别下的颜色一致性评价结果,其中,粗体和下划线表示最优结果和次优结果. 结果表明,本研究所提的2种算法均表现出较优的性能. 文献[21 ]所提方法由于依赖于2个变换函数,存在增加累积转换误差的风险,因此其性能较差且不稳定. 而传统的全局方法也有其局限性,难以兼顾与适应所有任意照明条件下的场景,因为它使用了基于组合所有光源的通用矩阵. 文献[16 ]所提方法由于对颜色的亮度和色度采取了较为简单的线性匹配策略,而在某些场景下表现不佳,故而对于场景的多样性和复杂性缺乏良好的适应性. 如图5 所示展示了所有照明条件下的平均颜色差异情况. 可以看出,所提算法在总体上表现更佳. 平均不含明度差的色差和平均彩度差均低于平均色差,反映了它们更多关注于色品成分的差异. 在平均彩度差方面,与基准相比,所提算法能够将智能手机主副摄之间的平均$\Delta C_{ab}^*$ $\Delta C_{ab}^*$
... 所示显示了3台相机在4种照明类别下的颜色一致性评价结果,其中,粗体和下划线表示最优结果和次优结果. 结果表明,本研究所提的2种算法均表现出较优的性能. 文献[21 ]所提方法由于依赖于2个变换函数,存在增加累积转换误差的风险,因此其性能较差且不稳定. 而传统的全局方法也有其局限性,难以兼顾与适应所有任意照明条件下的场景,因为它使用了基于组合所有光源的通用矩阵. 文献[16 ]所提方法由于对颜色的亮度和色度采取了较为简单的线性匹配策略,而在某些场景下表现不佳,故而对于场景的多样性和复杂性缺乏良好的适应性. 如图5 所示展示了所有照明条件下的平均颜色差异情况. 可以看出,所提算法在总体上表现更佳. 平均不含明度差的色差和平均彩度差均低于平均色差,反映了它们更多关注于色品成分的差异. 在平均彩度差方面,与基准相比,所提算法能够将智能手机主副摄之间的平均$\Delta C_{ab}^*$ $\Delta C_{ab}^*$
... Color consistency results of four illumination conditions for mapping among three cameras
Tab.2 算法 LED 日光 荧光灯 钨丝灯 $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ $\Delta E_{ab}^*$ $\Delta E_{ab,{\text{ }}w/o{\text{ }}\Delta {L^*}}^*$ $\Delta C_{ab}^*$ 智能手机超广角副摄像 基准 4.78 3.68 2.66 6.91 4.72 4.18 4.76 3.18 2.25 4.60 3.33 2.44 文献[21 ] 3.61 2.58 1.83 5.05 2.77 2.26 3.27 1.71 1.17 3.41 2.24 1.58 文献[16 ] 6.52 5.75 3.31 5.71 3.48 1.98 4.57 3.25 1.85 6.65 5.74 3.17 文献[4 ] 4.17 3.06 2.00 4.42 2.57 1.57 3.36 2.02 1.33 3.22 1.97 1.28 全局方法[21 ] 3.65 2.56 1.74 4.64 2.31 1.62 3.42 1.80 1.19 3.51 2.23 1.53 CCT-AAPM 3.26 2.22 1.47 4.28 2.04 1.32 3.26 1.62 1.07 3.00 1.80 1.14 CA-ACM 3.33 2.25 1.49 4.05 1.90 1.17 3.34 1.70 1.15 2.97 1.77 1.12 智能手机主摄像头 → 基准 5.59 4.07 3.24 4.04 2.66 2.13 7.88 5.82 5.61 9.31 7.41 6.91 文献[21 ] 5.37 4.09 3.19 5.05 4.03 3.51 5.18 2.41 1.96 6.79 4.89 3.84 文献[16 ] 6.90 5.46 3.49 6.00 4.81 2.98 11.39 10.03 6.36 11.76 10.12 6.36 文献[4 ] 5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60
图 5 3台相机间所有测试图像的平均颜色差异结果 ...
... [
21 ]
3.65 2.56 1.74 4.64 2.31 1.62 3.42 1.80 1.19 3.51 2.23 1.53 CCT-AAPM 3.26 2.22 1.47 4.28 2.04 1.32 3.26 1.62 1.07 3.00 1.80 1.14 CA-ACM 3.33 2.25 1.49 4.05 1.90 1.17 3.34 1.70 1.15 2.97 1.77 1.12 智能手机主摄像头 → 基准 5.59 4.07 3.24 4.04 2.66 2.13 7.88 5.82 5.61 9.31 7.41 6.91 文献[21 ] 5.37 4.09 3.19 5.05 4.03 3.51 5.18 2.41 1.96 6.79 4.89 3.84 文献[16 ] 6.90 5.46 3.49 6.00 4.81 2.98 11.39 10.03 6.36 11.76 10.12 6.36 文献[4 ] 5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60 图 5 3台相机间所有测试图像的平均颜色差异结果 ...
... 文献[
21 ]
5.37 4.09 3.19 5.05 4.03 3.51 5.18 2.41 1.96 6.79 4.89 3.84 文献[16 ] 6.90 5.46 3.49 6.00 4.81 2.98 11.39 10.03 6.36 11.76 10.12 6.36 文献[4 ] 5.26 3.47 2.36 3.43 2.08 1.67 5.90 2.86 2.28 5.92 3.33 2.53 全局方法[21 ] 4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60 图 5 3台相机间所有测试图像的平均颜色差异结果 ...
... [
21 ]
4.32 2.74 1.89 3.35 2.04 1.65 5.20 2.54 2.10 5.59 3.38 2.57 CCT-AAPM 3.95 2.51 1.65 2.74 1.55 1.14 4.92 2.05 1.49 5.08 2.67 1.67 CA-ACM 4.02 2.54 1.70 2.73 1.53 1.14 4.91 2.02 1.55 5.04 2.60 1.60 图 5 3台相机间所有测试图像的平均颜色差异结果 ...
2
... 现有的颜色一致性算法通过采用不同的技术来减少跨相机应用中的颜色差异. 根据所处理图像的格式,颜色一致性算法大致可以分为2类:一类是基于sRGB特定颜色空间的算法[4 -17 ] ,另一类则侧重于RAW数据的处理[18 -22 ] . 前者的经典算法之一是颜色传递方法,其中部分方法还进一步融合了亮度补偿或颜色分割技术,旨在使图像之间的颜色外观保持一致[4 -8 ] . 然而,这类方法在处理复杂内容图像时,往往会产生不自然的结果. 此外,基于图像对重叠区域计算映射函数的直方图匹配方法也得到了广泛研究[9 -10 ] . 还有一系列方法聚焦于利用图像之间的对应特征点集合[11 -15 ] 或者代表性色块样本[16 -17 ] ,以建立与图像内容紧密相关的自适应颜色映射机制,从而提高图像间的颜色映射精度. 该类方法的效果通常依赖于所选择的特征点对或色块样本的有效性以及颜色映射策略的设计合理性. 对于基于RAW数据的算法,一些研究建立了色度特征化模型,但其计算过程较为复杂[18 -20 ] . 为了实现相机之间的直接映射,Nguyen等[21 ] 提出白平衡辅助的两阶段线性变换,利用全局映射和光照特定映射来处理跨相机图像之间的颜色不一致性. Afifi等[22 ] 设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
... [22 ]设计半监督的RAW到RAW映射方法,借助一个轻量级深度学习网络来学习不同相机之间的映射关系,尽管该方法在低光极端场景下有其局限性. ...
1
... 受到改进的色度映射过程启发[23 ] ,提出色温感知的自适应分区映射(correlated-color-temperatures-aware adaptive partitioning mapping, CCT-AAPM)算法. 相关色温作为照明光源的重要参数之一,对人眼视觉所观察到的照明颜色特性起着决定性作用. CCT-AAPM算法的核心在于采用了精细化的相关色温范围分割策略,充分考虑了不同色温光源对色彩感知的重要影响. 通过将相关色温范围进行细致划分,并为特定的色温节点设计专门的色彩映射算子,本算法实现了场景特定的RAW至RAW的精确映射,从而显著提高了在各种光照条件下的颜色一致性. 传统方法,如Nguyen等[21 ] 描述的全局方法,通常仅依赖于一个单一的、适用于所有现实世界场景的转换机制,因此在改善颜色一致性方面存在局限. 相较之下,CCT-AAPM算法通过其独到的光源感知分区映射策略,能够动态适应多种不同的照明环境. 如图1 所示,该算法的总体框架包括训练和实施2个阶段. 在多种可控照明条件下,采用3台相机对X-Rite ColorChecker Digital SG色卡进行拍摄,分别针对关键色温分段点构建相应的颜色一致性映射算子. 通过这些在不同照明条件下获得的色卡图像,能够确保推导出的颜色一致性映射算子的鲁棒性和普适性,从而显著提升CCT-AAPM算法的整体性能. 将最大限度地降低2台相机在RAW域RGB响应值的色度残差设定为优化目标,以达到近似推导出最佳映射算子的目的,表达式如下: ...
Computation of correlated color temperature and distribution temperature
1
1968
... 在实施阶段,通过白点[24 -25 ] 估算被摄场景中的照明色温,然后选择相应的由训练得到的成对映射算子,以推导出最终的光源感知的映射算子,具体表达如下: ...
Modifications of the Robertson method for calculating correlated color temperature to improve accuracy and speed
1
2024
... 在实施阶段,通过白点[24 -25 ] 估算被摄场景中的照明色温,然后选择相应的由训练得到的成对映射算子,以推导出最终的光源感知的映射算子,具体表达如下: ...
Spectral design methods for multi-channel LED light sources based on differential evolution
1
2016
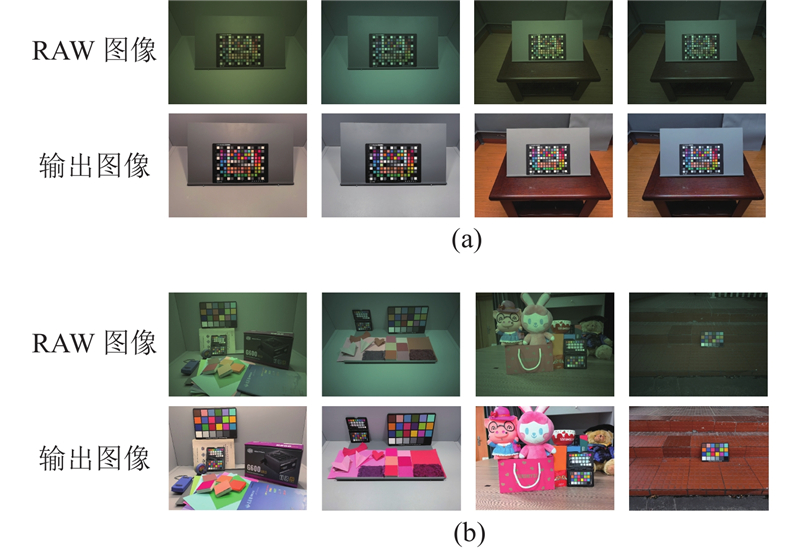
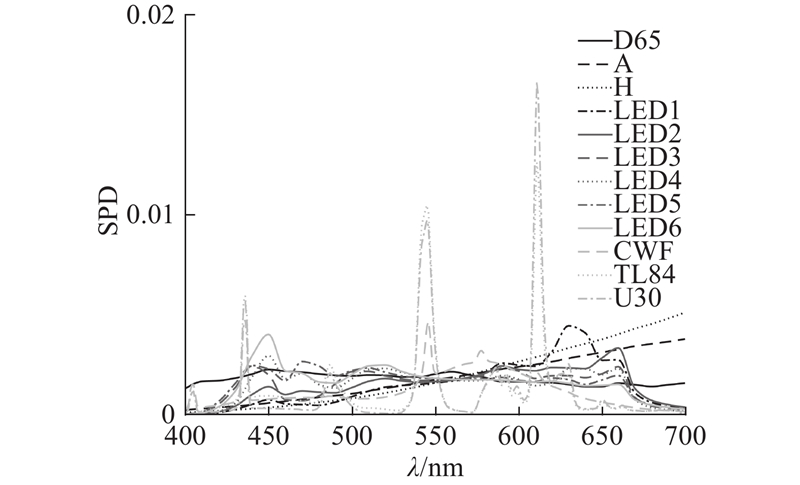
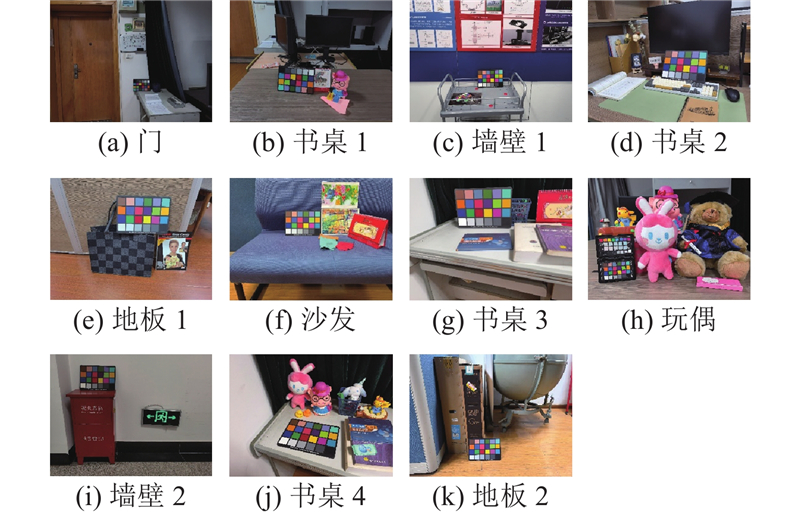
... 为了构建一个场景及设备多样化的RAW图像数据集,在实验中使用了3种不同的相机设备,分别为尼康D3x数码单反相机、某款智能手机的主摄像头和超广角副摄像头. 每台相机分别拍摄151组不同的场景(总计151×3=453组场景),其中12组用于训练,其余139组则用于测试. 如图3 所示为部分实验场景,其中图3 (a)、(b)的第1、2行分别表示RAW图像和经相机内部各模块处理后的最终输出图像. 在训练集中,图像包含X-Rite ColorChecker Digital SG专业色卡,并将该色卡放置于45°看样台上. 同时,相机设备被固定在距离看样台60 cm处的三角架上. 这些图像是在多光源标准灯箱和多通道可调谐LED照明系统[26 ] 提供的典型照明条件下拍摄的,具体的照明光源相关参数详见表1 . 表中,E 为照度,CCT为色温. 其中,LED1~LED6为LED照明类型,D65表示日光,CWF、TL84和U30属于荧光灯类别,而A和H则代表钨丝灯类型. 照度的非均匀性误差不超过5.2%,而色温的相对波动不超过2.9%. 使用柯尼卡-美能达CS-2000远摄型光谱辐射计 (tele-spectroradiometer, TSR) 对这些照明条件下的光谱功率分布进行测量. 如图4 所示展示了训练集中所包含的光源光谱功率分布,共计12种不同的照明条件. 为了校正光照不均匀性,在所有照明条件下均拍摄了位于色卡相同位置处的灰卡图像. 为了确保训练样本的有效性与代表性,在训练阶段,位于色卡最外围的中性色块因其与中间部分重复而被剔除. 因此,训练样本总共包括了12×96 = 1152 个色块. 而测试集的图像则是来自多种不同场景,其中不仅包含了训练阶段所采用的标准灯箱与LED平台,还包括了常见的室内及室外环境. 所有的测试场景均使用X-Rite ColorChecker Classic色卡作为验证标签. 值得注意的是,测试集相比于训练集涵盖了更广泛的照明条件,包括办公照明、楼道照明之类的室内照明环境以及晴天、阴天之类的室外自然照明环境. ...
The CIE 1976 color-difference formulae
1
1977
... 为了使RAW图像之间的颜色差异更接近人眼的视觉感知,白平衡校正是不可或缺的一步. 鉴于本研究的主要关注点不在于颜色恒常性算法,使用X-Rite ColorChecker Classic色卡的第21个中性灰色块作为参考白点. 算法性能评估主要基于3个客观指标,包括CIELAB色差${\Delta E}_{{{ab}}}^* $ [27 ] 、不包含明度差的色差$ \Delta E_{ab,{\text{ }}{w \mathord{\left/ {\vphantom {w {o{\text{ }}\Delta {L^*}}}} \right. } {o{\text{ }}\Delta {L^*}}}}^* $ ${\Delta C}_{{{ab}}}^* $ . 采用后2个指标是因为本研究主要着重于提高不同相机之间色度的一致性. 其中,不含明度差的色差的具体定义为 ...
1
... 在进行客观评价之前,首先须将图像从RGB色彩空间转换到CIE XYZ色彩空间[28 ] ,然后再采用第19个色块作为峰值白点转换到CIELAB色彩空间. 为了在后续章节中公平比较不同方法的性能,式 (1) 中的M M



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}