[1]
REINHARD E, HEIDRICH W, DEBEVEC P, et al. High dynamic range imaging: acquisition, display, and image-based lighting [M]. Morgan: Kaufmann, 2010: 1-18.
[本文引用: 1]
[2]
方竞宇. 高动态范围彩色图像捕获与显示方法及技术研究[D]. 杭州: 浙江大学, 2016: 78-80.
[本文引用: 1]
FANG Jing-yu. Study on methodology and technology of acquisition and rendering for high dynamic range color images [D]. Hangzhou: Zhejiang University, 2016: 78-80.
[本文引用: 1]
[3]
WARD G A contrast-based scale factor for luminance display
[J]. Graphics Gems , 1994 , 4 : 415 - 421
[本文引用: 1]
[4]
DRAGO F, MYSZKOWSKI K, ANNEN T, et al. Adaptive logarithmic mapping for displaying high contrast scenes [C]// Computer Graphics Forum . Oxford, UK: Blackwell Publishing, Inc, 2003: 419-426.
[本文引用: 7]
[5]
TUMBLIN J, RUSHMEIER H Tone reproduction for realistic images
[J]. IEEE Computer Graphics and Applications , 1993 , 13 (6 ): 42 - 48
DOI:10.1109/38.252554
[本文引用: 1]
[6]
SCHLICK C. Quantization techniques for visualization of high dynamic range pictures, photorealistic rendering techniques [M]. Berlin, Heidelberg: Springer, 1995: 7-20.
[本文引用: 1]
[7]
MA K, YEGANEH H, ZENG K, et al High dynamic range image compression by optimizing tone mapped image quality index
[J]. IEEE Transactions on Image Processing , 2015 , 24 (10 ): 3086 - 3097
DOI:10.1109/TIP.2015.2436340
[本文引用: 1]
[9]
AMBALATHANKANDY P, IKEBE M, YOSHIDA T, et al An adaptive global and local tone mapping algorithm implemented on FPGA
[J]. IEEE Transactions on Circuits and Systems for Video Technology , 2019 , 30 (9 ): 3015 - 3028
[本文引用: 1]
[10]
ZHANG X S, YANG K F, ZHOU J, et al Retina inspired tone mapping method for high dynamic range images
[J]. Optics Express , 2020 , 28 (5 ): 5953 - 5964
DOI:10.1364/OE.380555
[本文引用: 1]
[11]
LIANG Z, XU J, ZHANG D, et al. A hybrid l1-l0 layer decomposition model for tone mapping [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City, Utah, 2018: 4758-4766.
[本文引用: 8]
[12]
FAHIM M A N I, JUNG H Y Fast single-image HDR tone-mapping by avoiding base layer extraction
[J]. Multidisciplinary Digital Publishing Institute , 2020 , 20 (16 ): 4378
[本文引用: 1]
[13]
NGUYEN N H, VAN V T, LEE C Human visual system model-based optimized tone mapping of high dynamic range images
[J]. IEEE Access , 2021 , 9 : 127343 - 127355
DOI:10.1109/ACCESS.2021.3112046
[本文引用: 1]
[14]
DUAN J, BRESSAN M, DANCE C, et al Tone-mapping high dynamic range images by novel histogram adjustment
[J]. Pattern Recognition , 2010 , 43 (5 ): 1847 - 1862
DOI:10.1016/j.patcog.2009.12.006
[本文引用: 1]
[15]
OSKARSSON M Temporally consistent tone mapping of images and video using optimal k-means clustering
[J]. Journal of Mathematical Imaging and Vision , 2017 , 57 (2 ): 225 - 238
DOI:10.1007/s10851-016-0677-1
[16]
LARSON G W, RUSHMEIER H, PIATKO C A visibility matching tone reproduction operator for high dynamic range scenes
[J]. IEEE Transactions on Visualization and Computer Graphics , 1997 , 3 (4 ): 291 - 306
DOI:10.1109/2945.646233
[本文引用: 1]
[17]
WANG H, SONG M Ckmeans. 1d. dp: optimal k-means clustering in one dimension by dynamic programming
[J]. The R Journal , 2011 , 3 (2 ): 29
DOI:10.32614/RJ-2011-015
[本文引用: 1]
[19]
徐海松. 颜色信息工程第2版 [M]. 杭州: 浙江大学出版社, 2015: 50-54.
[本文引用: 1]
XU Hai-song. Color information engineering and the second edition [M]. Hangzhou: Zhejiang University Press, 2015: 50-54.
[本文引用: 1]
[20]
PANETTA K, KEZEBOU L, OLUDARE V, et al TMO-Net: a parameter-free tone mapping operator using generative adversarial network, and performance benchmarking on large scale HDR dataset
[J]. IEEE Access , 2021 , 9 : 39500 - 39517
DOI:10.1109/ACCESS.2021.3064295
[本文引用: 1]
[21]
YEGANEH H, WANG Z Objective quality assessment of tone-mapped images
[J]. IEEE Transactions on Image Processing , 2012 , 22 (2 ): 657 - 667
[本文引用: 1]
[22]
KIM M H, KAUTZ J. Consistent tone reproduction [C]// Proceedings of the Tenth IASTED International Conference on Computer Graphics and Imaging . ACTA Press Anaheim, 2008: 152-159.
[本文引用: 5]
[23]
REINHARD E, STARK M, SHIRLEY P, et al. Photographic tone reproduction for digital images [C]// Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques . San Antonio Texas, 2002: 267-276.
[本文引用: 4]
[24]
KRAWCZYK G, MYSZKOWSKI K, SEIDEL H P. Lightness perception in tone reproduction for high dynamic range images [C]// Computer Graphics Forum . North Holland, 2005: 635-646.
[本文引用: 5]
[25]
SHAN Q, JIA J, BROWN M S Globally optimized linear windowed tone mapping
[J]. IEEE Transactions on Visualization and Computer Graphics , 2009 , 16 (4 ): 663 - 675
[本文引用: 6]
[26]
LI H, JIA X, ZHANG L Clustering based content and color adaptive tone mapping
[J]. Computer Vision and Image Understanding , 2018 , 168 : 37 - 49
DOI:10.1016/j.cviu.2017.11.001
[本文引用: 7]
[27]
BANTERLE F, ARTUSI A, DEBATTISTA K, et al. Advanced high dynamic range imaging [M]. AK Peters/CRC Press, Massachusetts, 2017: 271-276.
[本文引用: 1]
1
... 高动态范围(high dynamic range, HDR)图像具有动态范围大、色域广和细节丰富的优点,在消费电子和机器视觉等领域中逐渐得到广泛的应用[1 ] . HDR图像不仅展现更真实生动的图像外观,还作为机器视觉中识别和分析任务的对象. 尽管HDR显示设备很受消费者欢迎,但不具备显示HDR图像能力的低动态范围(low dynamic range, LDR)显示设备仍然占据目前大部分的市场份额. 因此,需要通过阶调映射(tone mapping)技术对HDR图像的动态范围进行压缩并调制颜色,使得可以适用于传统LDR显示设备,提供与真实场景相近的视觉感知[2 ] . ...
1
... 高动态范围(high dynamic range, HDR)图像具有动态范围大、色域广和细节丰富的优点,在消费电子和机器视觉等领域中逐渐得到广泛的应用[1 ] . HDR图像不仅展现更真实生动的图像外观,还作为机器视觉中识别和分析任务的对象. 尽管HDR显示设备很受消费者欢迎,但不具备显示HDR图像能力的低动态范围(low dynamic range, LDR)显示设备仍然占据目前大部分的市场份额. 因此,需要通过阶调映射(tone mapping)技术对HDR图像的动态范围进行压缩并调制颜色,使得可以适用于传统LDR显示设备,提供与真实场景相近的视觉感知[2 ] . ...
1
... 高动态范围(high dynamic range, HDR)图像具有动态范围大、色域广和细节丰富的优点,在消费电子和机器视觉等领域中逐渐得到广泛的应用[1 ] . HDR图像不仅展现更真实生动的图像外观,还作为机器视觉中识别和分析任务的对象. 尽管HDR显示设备很受消费者欢迎,但不具备显示HDR图像能力的低动态范围(low dynamic range, LDR)显示设备仍然占据目前大部分的市场份额. 因此,需要通过阶调映射(tone mapping)技术对HDR图像的动态范围进行压缩并调制颜色,使得可以适用于传统LDR显示设备,提供与真实场景相近的视觉感知[2 ] . ...
A contrast-based scale factor for luminance display
1
1994
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
7
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
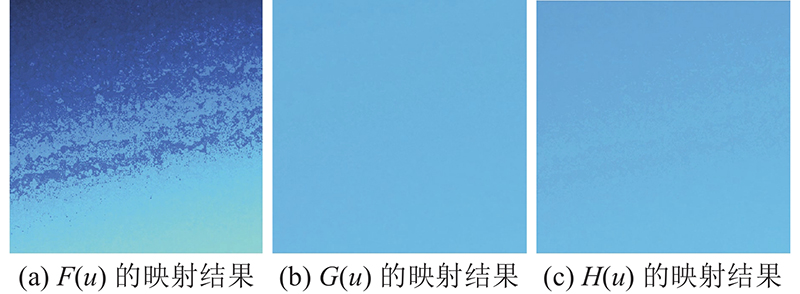
... 在每个长方形区域中,首先由基于直方图的K均值聚类问题求解出初始的映射曲线,根据韦伯-费希纳定理,人眼感知的明度与辐射亮度的对数呈线性关系,因此在以往的研究中对数域的亮度通道被广泛用于动态范围的调制[4 ] . 为了抑制对比度的过度增强,本研究相似地引入对数形式的映射关系为 ...
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
Tone reproduction for realistic images
1
1993
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
1
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
High dynamic range image compression by optimizing tone mapped image quality index
1
2015
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
Tone-mapping using perceptual-quantizer and image histogram
7
2020
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
... [8 ,14 -16 ],建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
An adaptive global and local tone mapping algorithm implemented on FPGA
1
2019
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
Retina inspired tone mapping method for high dynamic range images
1
2020
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
8
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
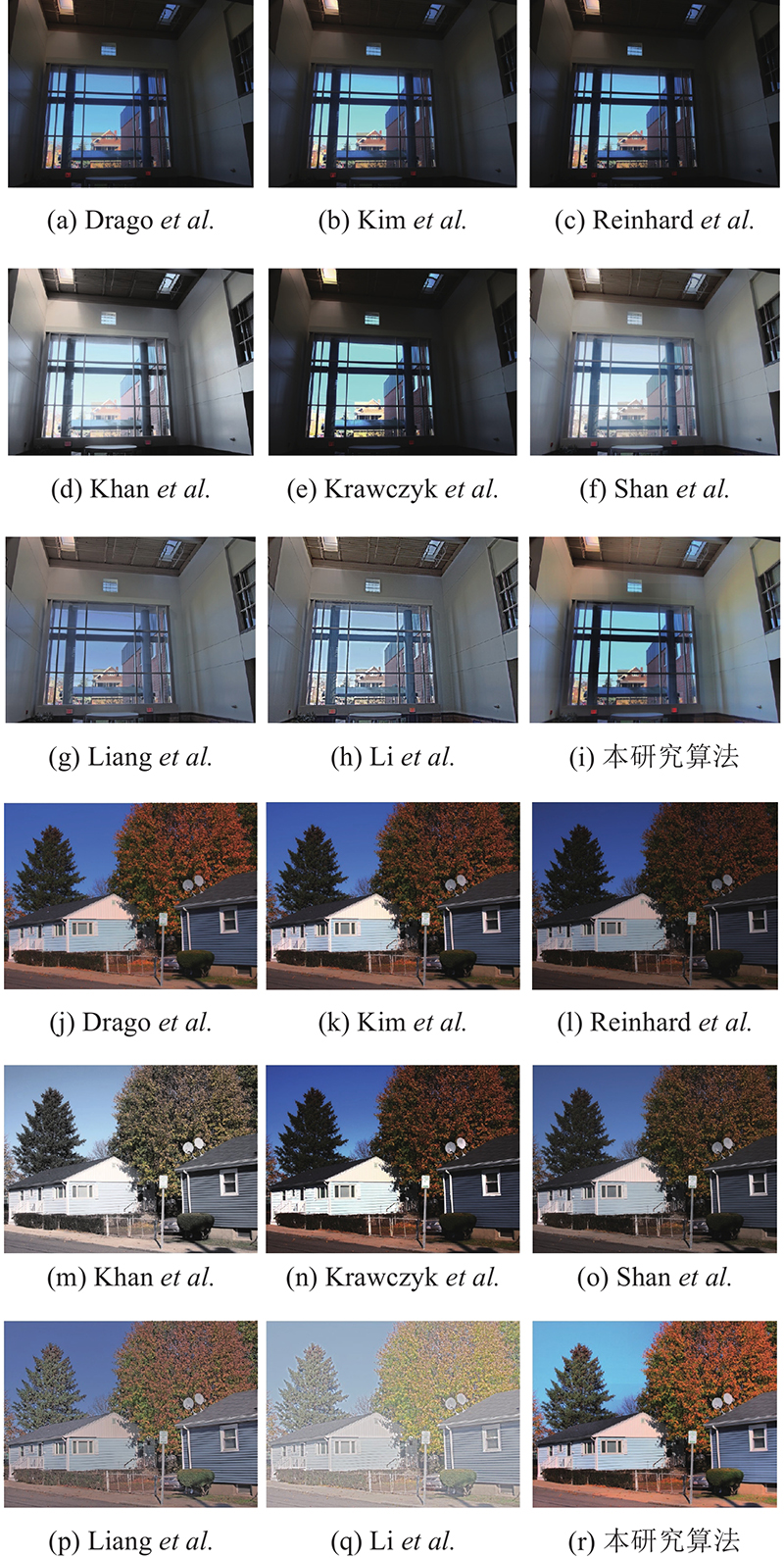
... 图6 中给出2幅代表性图像的映射结果. 对于左侧的图像,其它算法或在室内的对比度不足,或损失室外的场景细节与自然性,如Liang等[11 ] 及Li等[26 ] 的算法结果在室内保留充足的细节,但是室外对比度不佳且整体色彩偏暗淡. 本研究算法结果在室内外均展现良好的整体对比度与细节丰富度,与本研究算法采用的图像分块与融合息息相关,图像分块使得各区域的局部对比度均能得到有效的保留与提升,而同时双边滤波形式的图像融合算法消除边界伪影的影响. 对于右侧的图像,在树木的纹理结构保留上,本研究算法展现更好的效果,具体表现为右上方的树叶细节更为清晰可见,而作为非均匀的区域,更多得益于K均值聚类算法的细节增强性能. ...
... 为了评估各算法的运算效率,对平均运行时间进行测试,如表5 所示. 其中前4行为全局算法而后几行为局部算法. 在测试中,输入HDR图像的分辨率约为4 000×3 000像素,采用装配8GB内存、Intel(R) Core(TM) i5-34703.20GHz CPU及64位Windows 10操作系统的ThinkStation计算机,平台为MATLAB 2021b. 由表5 可见,全局阶调映射算法速度较快,在局部阶调映射算法中,本研究算法的运算效率尽管略低于基于亮度框架进行各区域整体映射的Krawczyk等[24 ] 的算法,但明显高于Shan等[25 ] 、Liang等[11 ] 及Li等[26 ] 的算法,这是因为本研究算法相对于基于邻域的局部算法,生成映射曲线的子区域数目较少,并且采用动态规划法求解映射曲线,具有较低的时间复杂度. 总体而言,虽然不及全局阶调映射算法,但是本研究算法作为局部阶调映射算法具有优良的运算速度. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
Fast single-image HDR tone-mapping by avoiding base layer extraction
1
2020
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
Human visual system model-based optimized tone mapping of high dynamic range images
1
2021
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
Tone-mapping high dynamic range images by novel histogram adjustment
1
2010
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
Temporally consistent tone mapping of images and video using optimal k-means clustering
0
2017
A visibility matching tone reproduction operator for high dynamic range scenes
1
1997
... 现有的阶调映射算法大体可以分为全局阶调映射和局部阶调映射2类. 全局阶调映射采用特定的单调曲线对图像全局进行映射,如线性[3 ] 、对数[4 ] 、指数[5 ] 及S型(sigmoid)[6 ] 曲线等,运算较为快速但在压缩动态范围的同时也会导致局部对比度的下降. 近年来的研究一方面基于客观评估指标或人眼视觉系统(human visual system,HVS)特性对全局曲线的映射效果进行优化[7 -8 ] ;一方面利用硬件设备提升运算效率[9 ] . 局部阶调映射对于某个像素的映射方式与其邻域特征有关,具有更好的细节再现特征但往往会引入伪影. 该类方法逐渐成为阶调映射算法的主流,其中一部分基于HVS特性模拟感光细胞的动态范围压缩过程[10 ] ,另一部分采用边缘保留的平滑算子提取图像的基础层与细节层并分别处理[11 ] . 还有研究将阶调映射建模为对比度增强问题从而求解该优化问题[12 -13 ] . 阶调映射算法中还包括一类基于直方图的方法[8 ,14 -16 ] ,建立于图像的统计信息之上,往往运用直方图的均衡化或参考人眼对于亮度的感知特性,可以较好地保留图像的对比度. 在图像直方图分布较为密集或稀疏的亮度区间,仍可能会出现对比度过度增强或压缩的情况,导致图像质量的下降. ...
Ckmeans. 1d. dp: optimal k-means clustering in one dimension by dynamic programming
1
2011
... 式中:l 为u i [17 ] 提出的动态规划方法求得全局最优解,故映射函数为 ...
人眼亮度感知特性在高动态范围影像中的应用
1
2021
... 如今的HDR标准均采用BT.2020规定的白点及色域,所以HDR图像的红、绿、蓝3个通道与CIE1931 XYZ标准色度系统的三刺激值之间存在着线性关系[18 ] ,而Y 通道对应于人眼的亮度感知[19 ] . 因此,对于一幅待处理的HDR图像,亮度图像I 根据BT.2020标准提取为 ...
人眼亮度感知特性在高动态范围影像中的应用
1
2021
... 如今的HDR标准均采用BT.2020规定的白点及色域,所以HDR图像的红、绿、蓝3个通道与CIE1931 XYZ标准色度系统的三刺激值之间存在着线性关系[18 ] ,而Y 通道对应于人眼的亮度感知[19 ] . 因此,对于一幅待处理的HDR图像,亮度图像I 根据BT.2020标准提取为 ...
1
... 如今的HDR标准均采用BT.2020规定的白点及色域,所以HDR图像的红、绿、蓝3个通道与CIE1931 XYZ标准色度系统的三刺激值之间存在着线性关系[18 ] ,而Y 通道对应于人眼的亮度感知[19 ] . 因此,对于一幅待处理的HDR图像,亮度图像I 根据BT.2020标准提取为 ...
1
... 如今的HDR标准均采用BT.2020规定的白点及色域,所以HDR图像的红、绿、蓝3个通道与CIE1931 XYZ标准色度系统的三刺激值之间存在着线性关系[18 ] ,而Y 通道对应于人眼的亮度感知[19 ] . 因此,对于一幅待处理的HDR图像,亮度图像I 根据BT.2020标准提取为 ...
TMO-Net: a parameter-free tone mapping operator using generative adversarial network, and performance benchmarking on large scale HDR dataset
1
2021
... 实验选取LVZ-HDR数据库[20 ] 中具有代表性的9 张图为例,这些图像兼顾了室内外的场景. 为了客观地评价映射效果,采用广泛使用的阶调映射图像指标(TMQI)[21 ] 来比较各算法的表现. 计算公式为 ...
Objective quality assessment of tone-mapped images
1
2012
... 实验选取LVZ-HDR数据库[20 ] 中具有代表性的9 张图为例,这些图像兼顾了室内外的场景. 为了客观地评价映射效果,采用广泛使用的阶调映射图像指标(TMQI)[21 ] 来比较各算法的表现. 计算公式为 ...
5
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
4
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
5
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... 为了评估各算法的运算效率,对平均运行时间进行测试,如表5 所示. 其中前4行为全局算法而后几行为局部算法. 在测试中,输入HDR图像的分辨率约为4 000×3 000像素,采用装配8GB内存、Intel(R) Core(TM) i5-34703.20GHz CPU及64位Windows 10操作系统的ThinkStation计算机,平台为MATLAB 2021b. 由表5 可见,全局阶调映射算法速度较快,在局部阶调映射算法中,本研究算法的运算效率尽管略低于基于亮度框架进行各区域整体映射的Krawczyk等[24 ] 的算法,但明显高于Shan等[25 ] 、Liang等[11 ] 及Li等[26 ] 的算法,这是因为本研究算法相对于基于邻域的局部算法,生成映射曲线的子区域数目较少,并且采用动态规划法求解映射曲线,具有较低的时间复杂度. 总体而言,虽然不及全局阶调映射算法,但是本研究算法作为局部阶调映射算法具有优良的运算速度. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
Globally optimized linear windowed tone mapping
6
2009
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... 为了评估各算法的运算效率,对平均运行时间进行测试,如表5 所示. 其中前4行为全局算法而后几行为局部算法. 在测试中,输入HDR图像的分辨率约为4 000×3 000像素,采用装配8GB内存、Intel(R) Core(TM) i5-34703.20GHz CPU及64位Windows 10操作系统的ThinkStation计算机,平台为MATLAB 2021b. 由表5 可见,全局阶调映射算法速度较快,在局部阶调映射算法中,本研究算法的运算效率尽管略低于基于亮度框架进行各区域整体映射的Krawczyk等[24 ] 的算法,但明显高于Shan等[25 ] 、Liang等[11 ] 及Li等[26 ] 的算法,这是因为本研究算法相对于基于邻域的局部算法,生成映射曲线的子区域数目较少,并且采用动态规划法求解映射曲线,具有较低的时间复杂度. 总体而言,虽然不及全局阶调映射算法,但是本研究算法作为局部阶调映射算法具有优良的运算速度. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
Clustering based content and color adaptive tone mapping
7
2018
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...
... TMQI scores of different algorithms
Tab.2 图像 Q Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.76 0.72 0.72 0.81 0.73 0.73 0.81 0.91 0.88 2 0.70 0.68 0.65 0.79 0.68 0.60 0.75 0.89 0.82 3 0.77 0.78 0.73 0.88 0.74 0.75 0.82 0.87 0.87 4 0.76 0.78 0.73 0.85 0.71 0.74 0.80 0.85 0.87 5 0.88 0.84 0.79 0.88 0.85 0.88 0.86 0.73 0.98 6 0.85 0.84 0.73 0.88 0.77 0.76 0.86 0.81 0.90 7 0.91 0.88 0.79 0.83 0.88 0.87 0.84 0.71 0.95 8 0.86 0.87 0.78 0.87 0.82 0.84 0.85 0.72 0.97 9 0.72 0.82 0.71 0.79 0.70 0.72 0.83 0.80 0.84 均值 0.80 0.80 0.74 0.84 0.76 0.77 0.82 0.81 0.90
表 3 不同算法的结构保真性分数 ...
... Structure-fidelity scores of different algorithms
Tab.3 图像 S Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.78 0.70 0.69 0.70 0.73 0.72 0.66 0.73 0.87 2 0.61 0.55 0.49 0.70 0.55 0.37 0.57 0.68 0.74 3 0.79 0.81 0.73 0.75 0.74 0.77 0.64 0.72 0.83 4 0.77 0.79 0.71 0.69 0.64 0.74 0.62 0.71 0.82 5 0.87 0.88 0.85 0.73 0.90 0.88 0.70 0.69 0.93 6 0.70 0.71 0.65 0.73 0.64 0.67 0.59 0.67 0.78 7 0.87 0.87 0.86 0.73 0.88 0.88 0.67 0.66 0.89 8 0.86 0.87 0.84 0.75 0.87 0.87 0.69 0.70 0.92 9 0.63 0.74 0.61 0.66 0.50 0.63 0.56 0.61 0.74 均值 0.76 0.77 0.72 0.72 0.72 0.73 0.63 0.69 0.83
表 4 不同算法的自然性分数 ...
... Naturalness scores of different algorithms
Tab.4 图像 N Drago et al. [4 ] Kimet al. [22 ] Reinhard et al. [23 ] Khan et al. [8 ] Krawcyzk et al. [24 ] Shan et al. [25 ] Liang et al. [11 ] Liet al. [26 ] 本研究算法 1 0.05 0.01 0.00 0.33 0.01 0.01 0.41 0.85 0.44 2 0.01 0.01 0.00 0.22 0.02 0.00 0.26 0.86 0.33 3 0.05 0.08 0.01 0.62 0.00 0.01 0.48 0.64 0.45 4 0.04 0.07 0.00 0.56 0.02 0.01 0.45 0.52 0.44 5 0.46 0.23 0.06 0.66 0.24 0.41 0.60 0.03 0.97 6 0.55 0.45 0.05 0.72 0.22 0.15 0.84 0.38 0.74 7 0.61 0.44 0.06 0.36 0.41 0.38 0.52 0.00 0.85 8 0.36 0.38 0.05 0.60 0.17 0.25 0.57 0.01 0.93 9 0.04 0.34 0.03 0.30 0.13 0.06 0.74 0.45 0.45 均值 0.24 0.22 0.03 0.49 0.14 0.14 0.54 0.42 0.62
由表2 可知,在阶调映射图像指标上的均值取得最高分,相对于其它算法平均提升了13.9%,表明在图像整体质量上有较为显著的改善. 而表3 表明,在结构保真性上本研究算法均取得最高分,总体而言相对于其它算法平均提升了15.2%,说明本研究算法在映射中的细节保留更为有效. 从表4 可见,本研究算法在自然性上相对其它算法提升显著,相对其它算法的分数平均提升了0.34,表明本研究算法图像分布更符合人的观感喜好. 这3个指标从不同角度验证本研究算法明显提升HDR图像的阶调映射效果. ...
... 图6 中给出2幅代表性图像的映射结果. 对于左侧的图像,其它算法或在室内的对比度不足,或损失室外的场景细节与自然性,如Liang等[11 ] 及Li等[26 ] 的算法结果在室内保留充足的细节,但是室外对比度不佳且整体色彩偏暗淡. 本研究算法结果在室内外均展现良好的整体对比度与细节丰富度,与本研究算法采用的图像分块与融合息息相关,图像分块使得各区域的局部对比度均能得到有效的保留与提升,而同时双边滤波形式的图像融合算法消除边界伪影的影响. 对于右侧的图像,在树木的纹理结构保留上,本研究算法展现更好的效果,具体表现为右上方的树叶细节更为清晰可见,而作为非均匀的区域,更多得益于K均值聚类算法的细节增强性能. ...
... 为了评估各算法的运算效率,对平均运行时间进行测试,如表5 所示. 其中前4行为全局算法而后几行为局部算法. 在测试中,输入HDR图像的分辨率约为4 000×3 000像素,采用装配8GB内存、Intel(R) Core(TM) i5-34703.20GHz CPU及64位Windows 10操作系统的ThinkStation计算机,平台为MATLAB 2021b. 由表5 可见,全局阶调映射算法速度较快,在局部阶调映射算法中,本研究算法的运算效率尽管略低于基于亮度框架进行各区域整体映射的Krawczyk等[24 ] 的算法,但明显高于Shan等[25 ] 、Liang等[11 ] 及Li等[26 ] 的算法,这是因为本研究算法相对于基于邻域的局部算法,生成映射曲线的子区域数目较少,并且采用动态规划法求解映射曲线,具有较低的时间复杂度. 总体而言,虽然不及全局阶调映射算法,但是本研究算法作为局部阶调映射算法具有优良的运算速度. ...
... Average operation time of compared algorithms
Tab.5 算法 平均运行时间/s Drago et al. [4 ] 5.61 Kimet al. [22 ] 2.08 Reinhard et al. [23 ] 2.73 Khan et al. [8 ] 8.95 Krawcyzk et al. [24 ] 11.90 Shan et al. [25 ] 169.01 Liang et al. [11 ] 68.07 Liet al. [26 ] 183.38 本研究算法 15.64
4. 结 语 本研究算法将阶调映射问题转化为一维K均值聚类问题,建立相应的求解目标函数,提出区域均匀性判据并依此调节映射曲线的细节增强性能. 同时,本研究算法启发性地采用图像分块与融合的方式,基于子图像直方图的映射曲线能有效保留局部对比度,而双边滤波形式的图像融合方法则兼顾距离与亮度差,消除边界伪影从而保证图像的整体观感. ...
1
... 以Drago等[4 ,22 -25 ] 提出的典型算法与近年Li等[8 ,11 ,26 ] 提出的算法为对照,对本研究算法进行测试,结果见表2 ~4 . 上述参考算法采用相关作者主页或Banterle等[27 ] 提供的代码实现. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}