

能量管理策略作为混合动力汽车节省燃油的核心,已经得到广泛研究[1]. 按照控制策略是否基于优化理论,可以将能量管理策略分为基于规则和基于优化的控制策略. 基于规则的控制策略简单直观,在实车上已经大量应用,但其依赖于工程经验,控制性能较差[2]. 基于优化的控制策略所涉及的优化方法具体包括解析优化方法、数值优化方法和瞬时优化方法. 解析优化方法运用极小值原理求解动力系统的解析控制律,能实现较好的燃油经济性[3-4]. 数值优化方法常采用确定性动态规划将混合动力汽车的能量管理转化为多阶段决策问题[5]. 动态规划(dynamic programming,DP)可以求得理论上最优的控制律并实现最佳的燃油经济性,但其计算量庞大且须预知未来行驶工况. 因此DP常用于离线优化并作为其他策略的性能评价基准[6]. 瞬时优化方法则指在当前时刻对发动机和电机的功率分配进行优化[7-8]. 等效燃油消耗最小法(equivalent consumption minimization strategy,ECMS)是典型的瞬时优化方法,其核心思想是在燃油消耗与电量消耗之间建立起联系. 利用“电-油”等效转换系数将瞬时电量消耗转为燃油消耗量,然后通过求解当前时刻燃油消耗总量的最小值,得到最佳能量分配律[9]. 近年来,机器学习也被大量应用于混合动力汽车的能量管理,在典型工况下能够取得较好的控制效果[10]. 上述能量管理策略均以标准工况作为研究场景,忽略车速和道路坡度对整车能量效率的影响.
高精度地图和全球定位系统的应用给混合动力汽车的能量管理提供了更有利的场景. 例如,能量管理系统可以借助道路交通信息进行车速规划并实现经济型驾驶,从而进一步节省燃油减少排放[11-13]. 不少学者针对混合动力汽车,结合道路限速和坡度信息对经济型巡航策略展开研究. Zeng等[14]基于坡度预测改进并联式混合动力汽车的能量管理策略,但其没有进行车速的实时规划. Chen等[15]运用模型预测控制(model predictive control,MPC)对串联式混合动力汽车进行分层能量管理,通过解耦功率流优化与速度谱优化,取得了较好的节油效果. Uebel等[16]同样运用MPC方法,建立功率流与速度谱的联合优化架构,但过度线性化与问题简化大幅降低了其优化性能. 王建强等[17-18]利用最优算法DP求出车辆通过坡度变化路段的最优速度与能量分配,揭示了经济型巡航下车速的变化规律,但是复杂的计算过程无法保证该策略的实时性. 不难发现,混合动力汽车的经济型巡航属于混杂动态系统的最优控制问题,其难点在于须兼顾控制算法的优化性能与计算效率. Xu等[19]参考瞬时优化策略ECMS,结合车辆动能管理建立在线优化算法. 以内燃机汽车为对象,将车辆动能等效成燃油消耗,取得比传统MPC更好的优化效果. Zhuang等[20]将ECMS中的等效原理应用到纯电动车经济型巡航问题上,同样实现了在线计算并取得较好的节能效果. 文献[19]、[20]分别针对传统内燃机汽车和纯电动汽车,依次建立车辆动能与燃油消耗、车辆动能与电能消耗间的等效关系. 不同于内燃机汽车和纯电动汽车,混合动力汽车既有燃油消耗又有电能消耗. 因此,当进一步把ECMS的概念引入混合动力汽车的车速规划控制中时,须建立燃油消耗、电能消耗与车辆动能三者之间的等效关系.
本研究针对功率分流式混合动力汽车,在传统ECMS策略的基础上,改进并提出增强型等效燃油最小化策略(reinforced equivalent consumption minimization strategy,R-ECMS). 基于极小值原理和车辆动能管理设计并验证了新的车速规划策略. 同时依据真实的道路数据对策略中的关键参数进行深度优化,确保其实际的优化性能.
1. 混合动力汽车模型建立
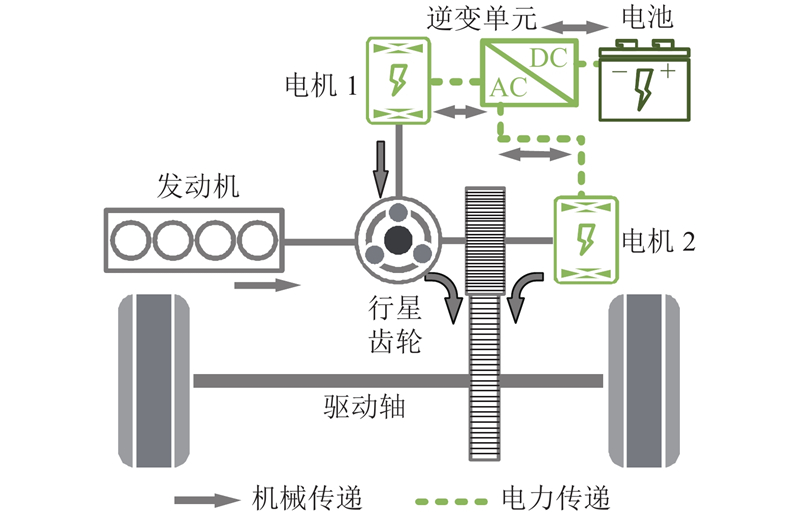
以功率分流式混合动力汽车为研究对象,其系统构型如图1所示. 该混合动力汽车利用行星齿轮实现发动机、电机1(MG1)、电机2(MG2)的功率耦合. MG1和MG2通过调整工作模式(电动模式和发电模式),配合行星齿轮的转速解耦特性,可以保持发动机工作在高效率区间,同时实现制动能量回收功能.
图 1
1.1. 动力学模型
1.1.1. 车辆纵向动力学模型
混合动力汽车的能量管理通过分配发动机与电机之间的功率,输出满足车辆纵向行驶的驱动力. 汽车在行驶过程中的纵向阻力包括滚动阻力、坡道阻力、空气阻力与惯性阻力. 因此,动力耦合装置输出轴处的车辆行驶阻力矩为
式中:
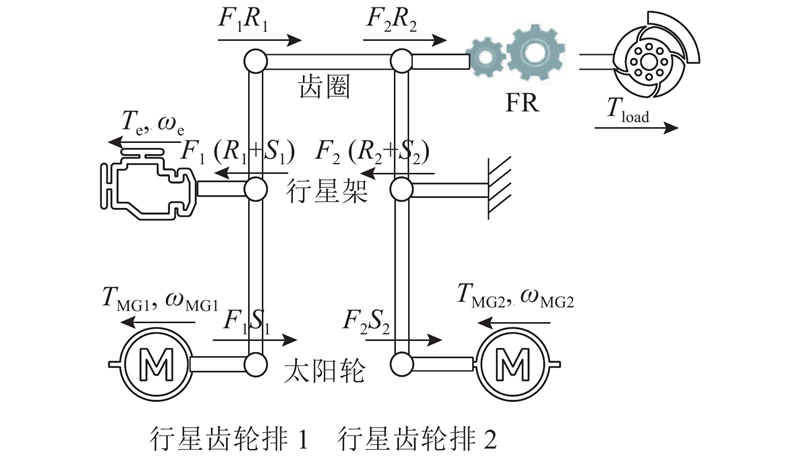
1.1.2. 行星齿轮排动力学模型
行星齿轮排中齿圈、行星架与太阳轮之间的转速满足:
式中:
图 2
式中:
1.1.3. 发动机和电机模型
为了简化计算,忽略发动机与电机的热力学效应,建立准静态下的发动机模型与电机模型:
式中:
式中:
1.1.4. 电池模型
采用RC电路建立电池模型,电池荷电状态(SOC)的变化率的表达式如下:
式中:
1.2. 整车基本参数
功率分流式混合动力汽车的基本参数如表1所示.
表 1 功率分流式混合动力汽车的基本参数
Tab.1
| 部位 | 参数 | 数值 |
| 车辆 | 整备质量m /kg | 1450 |
| 空气阻力系数CD | 0.28 | |
| 迎风面积Af /m2 | 2.52 | |
| 滚动阻力系数f | 0.015 | |
| 车轮半径Rtire /m | 0.287 | |
| 主减速比FR | 3.3 | |
| 发动机 | 最大功率/kW | 73 |
| 最大扭矩/Nm | 142 | |
| 电机MG1 | 最大功率/kW | 28 |
| 电机MG2 | 最大功率/kW | 40 |
| 电池 | 容量/(kW·h) | 4.4 |
| 行星齿轮 | R1/S1,R2/S2 | 3.30,2.63 |
其中,整车质量为1 450 kg,发动机最大功率为73 kW,2台电机总功率为68 kW,电池容量为4.4 kW∙h.
2. ECMS的建立
在ECMS的基础上,引入动能管理从而建立增强型瞬时车速规划策略R-ECMS. 因此首先依据极小值理论建立ECMS,并推导出油电等效系数.
2.1. 极小值最优问题
在车速已知的工况下,混合动力汽车能量管理问题可以描述为:以通过一段路总的燃油消耗为性能指标,考虑电池SOC前后的平衡,求解最优控制律. 运用极小值原理建立该优化问题:
式中:
2.2. 油电等效系数
上述极小值问题中的燃油消耗率
式中:
而在SOC保持模式下,式(9)中的
式中:常数
式中:
式中:
3. R-ECMS的建立
对于传统燃油汽车,加速滑行策略通过发动机间歇工作配合车辆滑行能有效提高巡航时的燃油经济性[13]. 根据该策略,可以将车身动能与驱动系统做功视为维持车辆行驶的2个能量来源. 通过优化车身动能与驱动单元系统的供能分配可以获得更高的系统效率. 而基于等效燃油最小的车速规划策略核心就是将车辆动能变化等效成燃油消耗. 为此,本研究首先将混合动力汽车的动能变化转换成电能消耗,然后依据油电等效系数将计及动能变化后的电能消耗统一转化为燃油消耗.
假设在时间间隔
式中:m为汽车质量;
式中:
式中:
图 3
式(19)、(20)给出了动能与电能间的等效关系. 为了建立R-ECMS,还须建立电能与油耗间的等效关系:
式中:
结合式(16)、(19)构建瞬时优化目标函数,如下:
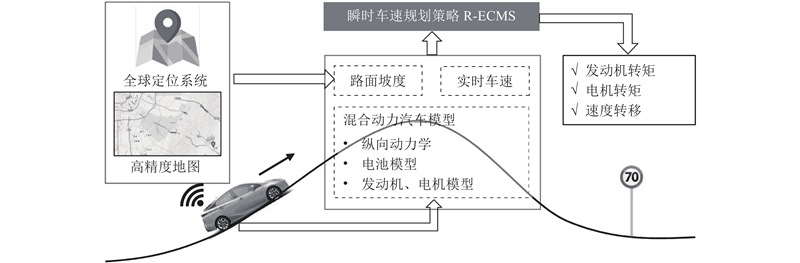
式(22)即R-ECMS中的等效油耗. 基于R-ECMS的混合动力汽车经济型巡航如图4所示. 通过车载传感器获取实时车速和道路坡度信息,解析求解动能的等效转换系数;根据式(22)和混合动力汽车模型计算最小等效油耗所对应的发动机和电机输出转矩.
图 4
4. R-ECMS仿真验证与讨论
为了验证R-ECMS策略的效能,设置一段仿真道路,其海拔
图 5
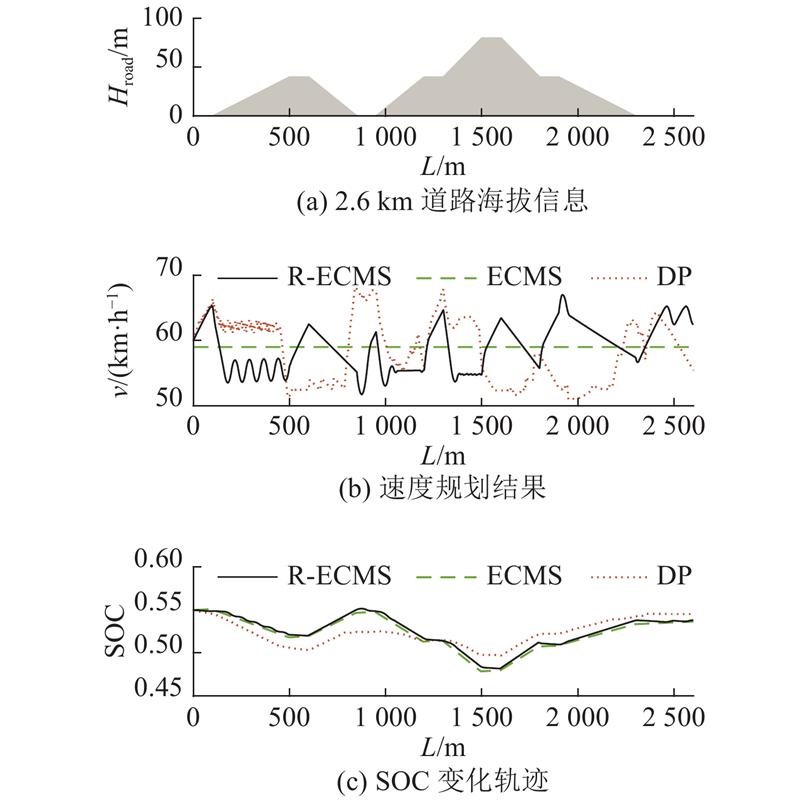
图 5 海拔信息与速度规划仿真结果
Fig.5 Elevation information and simulation results of speed-planning
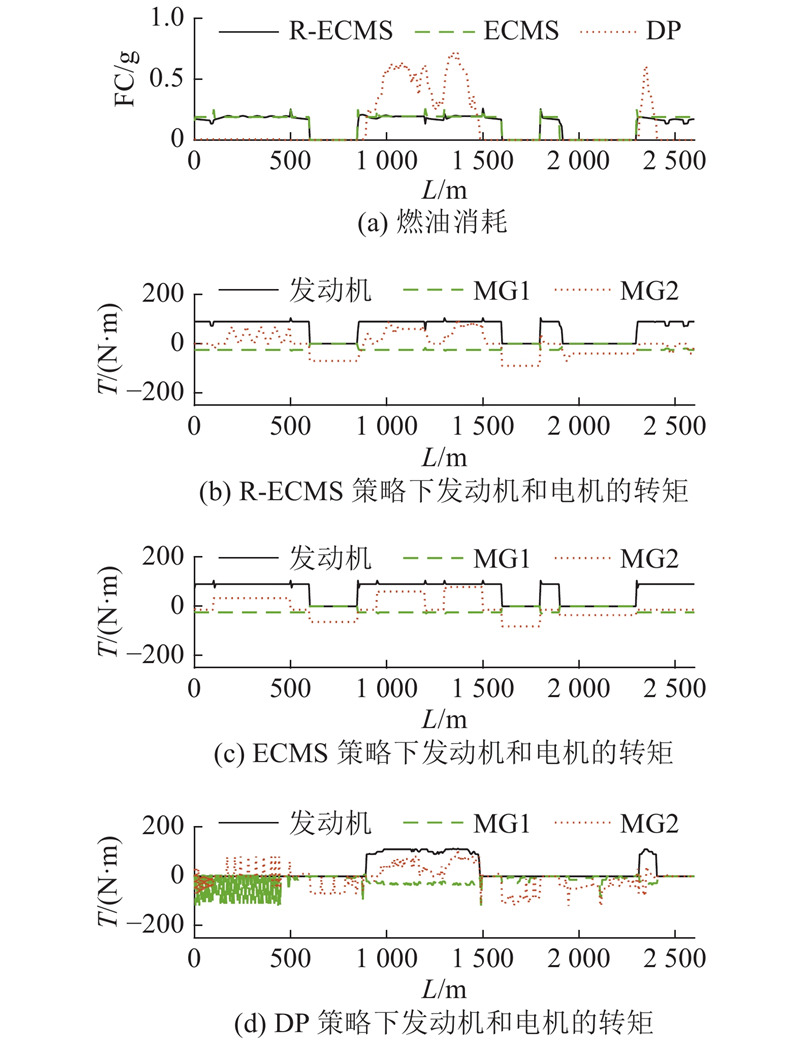
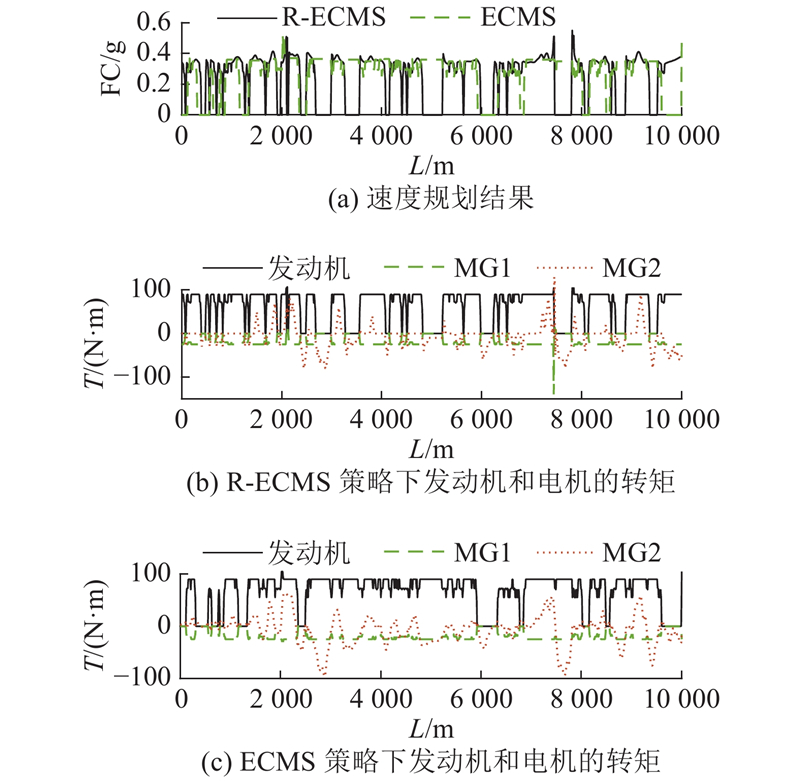
如图6所示为不同策略下的燃油消耗量
图 6
如表2所示为3种策略的性能. 在此2.6 km的道路上,R-ECMS、ECMS和DP策略得到的总燃油消耗
表 2 R-ECMS、ECMS与DP的性能对比
Tab.2
| 车速规划策略 | | | | |
| R-ECMS | 64.52 | −0.011 8 | 59.00 | 8.5 |
| ECMS | 67.84 | −0.013 4 | 59.00 | 3.9 |
| DP | 62.27 | −0.004 7 | 58.39 | 32 980.0 |
5. R-ECMS的性能优化
在上述案例中,R-ECMS策略中的权重特征值是直接选定的,同时上述的仿真路段不能代表实际道路场景. 因此,须针对现实道路场景优化权重特征值,综合提升R-ECMS策略的性能.
5.1. 遗传算法优化问题
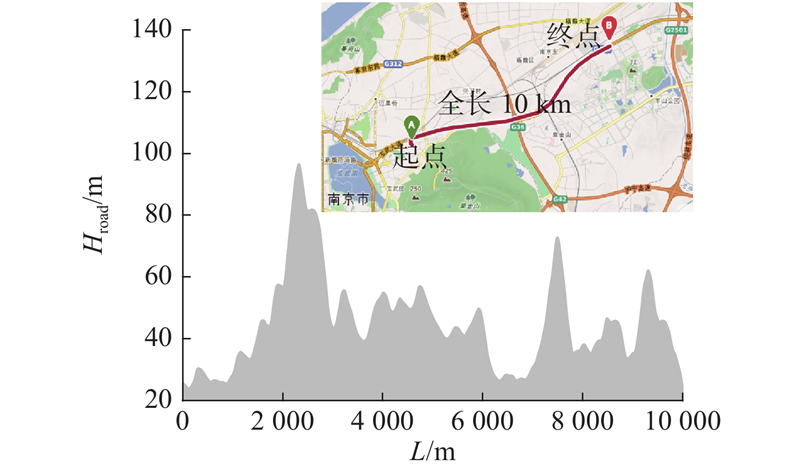
混合动力汽车的车速规划问题以提高燃油经济性为主要目的,同时须维持电池SOC平衡避免过充过放并保证通行效率. 为了提升R-ECMS策略的性能,采用遗传算法NSGA-II,基于真实的道路信息来深度优化R-ECMS中的关键参数. 如图7所示,该路段全长为10 km,选自南京钟山风景区至栖霞区的城市快速路,
图 7
将车辆通过该路段的平均速度、SOC变化量和燃油消耗总量作为优化目标,具体函数如下:
表 3 权重特征值的初始值和优化范围
Tab.3
| 权重特征值 | 初始值 | 优化范围 | 优化结果 |
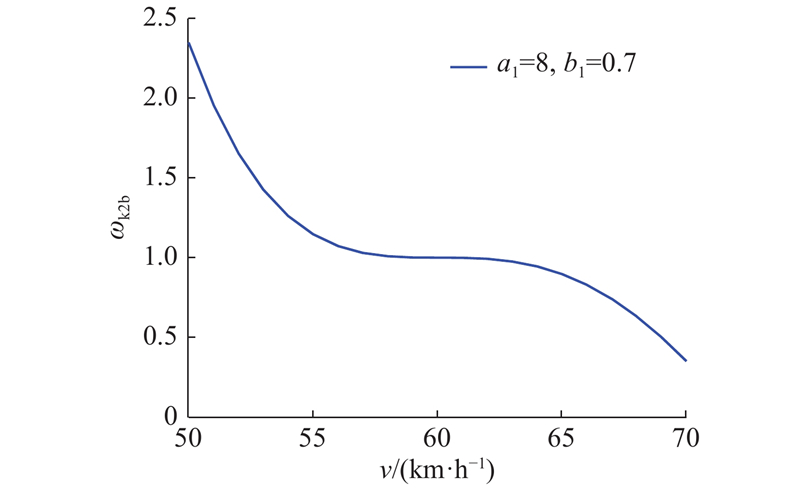
| | 8 | [1,15] | 9.345 |
| | 0.7 | [0.4,1.0] | 0.911 |
| | 8 | [1,15] | 13.241 |
| | 0.7 | [0.4,1.0] | 0.731 |
图 8
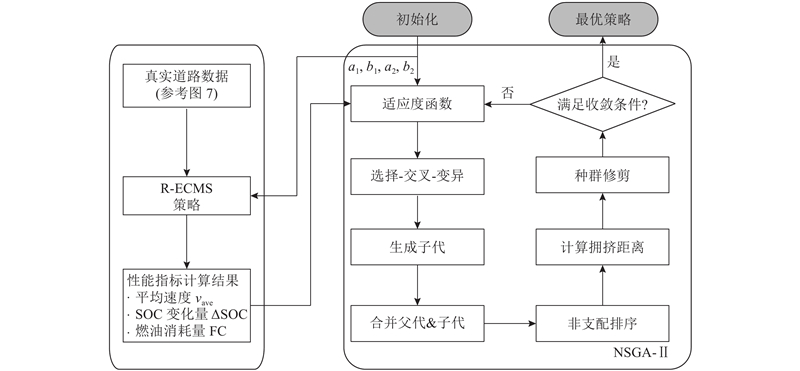
图 8 基于NSGA-II的R-ECMS优化架构
Fig.8 Optimization framework for R-ECMS using NSGA-II
5.2. R-ECMS策略优化结果
图 9
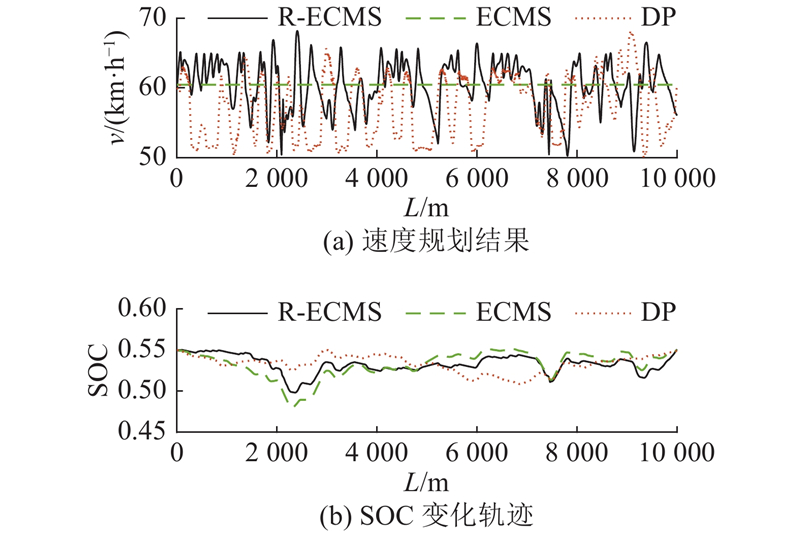
对比图9(a)、5(b)可以看出,在真实道路上,R-ECMS策略获得的速度随坡度变化规律与2.6 km自拟道路上的相似. 通过引入加速度约束和电机转矩变化幅值约束,R-ECMS有效保证了车辆巡航时的舒适性. 传统ECMS策略无法实现速度规划,只能依据指定的速度巡航(R-ECMS策略下的平均速度),如图9(a)中虚线所示. 不同策略获得的SOC轨迹如图9(b)所示,其中DP策略获得的SOC轨迹变化趋势与R-ECMS相似,但整体调整的幅度较小. 而R-ECMS策略与ECMS策略下的SOC轨迹较接近. 如图10所示为R-ECMS的优化结果,包括燃油消耗
图 10
如表4所示为不同巡航策略的结果,包括DP策略、优化前的R-ECMS策略以及对应的ECMS策略、优化后的R-ECMS策略以及对应的ECMS策略. 考虑到DP和R-ECMS策略下的平均速度各不相同,仅对比R-ECMS与ECMS策略的燃油经济性. 其中DP的各项性能指标均为最小值,其中较低的平均速度降低了车辆的通行效率. 优化前的R-ECMS各项性能指标均为最大值,此时R-ECMS节油率δ=6.52%. 经过遗传算法的深度优化,R-ECMS通过牺牲平均速度(61.34 km/h降低至60.47 km/h)显著降低了其余2项指标数值. 如表4所示,在平均速度相同和SOC变化量相近的情况下,优化后的R-ECMS与ECMS相比,燃油消耗降低了8.06%.
表 4 不同巡航策略的性能对比
Tab.4
| 车速规划策略 | | | | δ/% |
| DP | 224.56 | −0.000 7 | 57.25 | − |
| R-ECMS(优化前) | 284.26 | 0.025 5 | 61.34 | 6.52 |
| ECMS | 304.09 | 0.018 7 | 61.34 | − |
| R-ECMS(优化后) | 244.46 | 0.001 7 | 60.47 | 8.06 |
| ECMS | 265.89 | −0.002 5 | 60.47 | − |
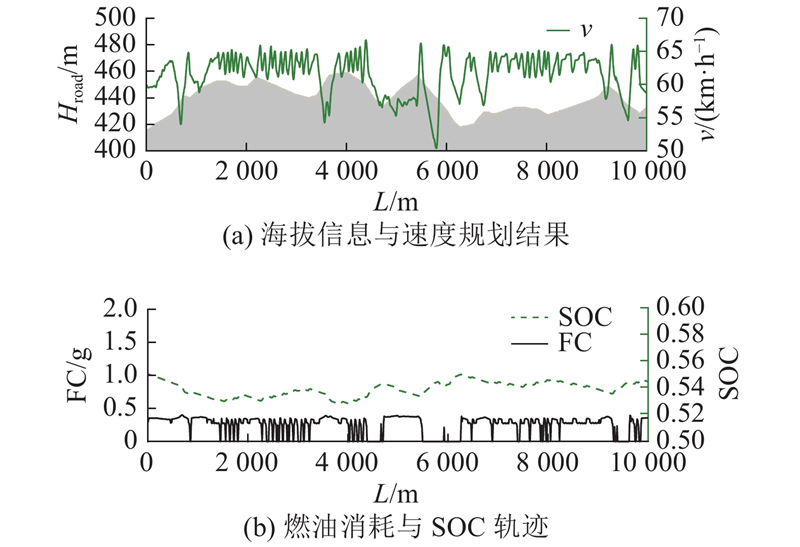
为了验证优化后的R-ECMS策略在其他场景下的泛化性能,增加了一组对比实验. 设置仿真场景为成都至重庆中间的一段快速路,参数设置与第4章一致.
如图11所示为R-ECMS仿真结果. 可以看出,经R-ECMS控制,车辆在新场景中同样能实现车速规划并维持SOC平衡. 经计算,总燃油消耗为252.22 g,相比ECMS策略实现了6.94%的节油率,证明R-ECMS车速规划策略具有较好的适用性.
图 11
6. 结 论
(1)在传统瞬时控制策略ECMS的基础上,引入车辆动能管理,建立动能与电能、电能与燃油间的等效关系,实现增强型车速规划策略R-ECMS.
(2)以提高混合动力汽车巡航的经济性为主要目的,同时考虑电池SOC平衡和车辆通过速度,应用遗传算法优化R-ECMS中的关键参数,提升策略的综合性能.
(3)对比R-ECMS与最优控制策略DP和传统策略ECMS. 相比DP,R-ECMS可以取得次优的优化效果,同时保证极佳的计算效率. 在真实道路场景下验证R-ECMS巡航的节油潜力,仿真结果表明,与ECMS相比,R-ECMS可以降低8.06%的燃油消耗. 此外,R-ECMS表现出较强的场景适用性.
(4)研究结果对混合动力汽车经济型巡航策略的制定具有一定参考意义. 本研究未考虑巡航过程中的跟车安全性,下一步将结合跟车场景进行实验验证.
参考文献
Modelling and control of hybrid electric vehicles: a comprehensive review
[J].DOI:10.1016/j.rser.2017.01.075 [本文引用: 1]
基于遗传算法系统效率优化的PHEV电量保持模式控制策略
[J].DOI:10.3969/j.issn.1001-7372.2018.05.021 [本文引用: 1]
Control strategy of phev charge-sustaining mode based on GA system efficiency optimization
[J].DOI:10.3969/j.issn.1001-7372.2018.05.021 [本文引用: 1]
基于近似极小值原理的插电式混合动力汽车实时控制策略
[J].DOI:10.3901/JME.2015.02.134 [本文引用: 1]
Plug-in hybrid vehicle ’s real-time control strategy based on approximate Pontryagin ’s minimum principle
[J].DOI:10.3901/JME.2015.02.134 [本文引用: 1]
Energy-optimal control of plug-in hybrid electric vehicles for real-world driving cycles
[J].DOI:10.1109/TVT.2011.2158565 [本文引用: 1]
基于改进型动态规划算法的串联混合动力汽车控制策略
[J].
Control strategy of series hybrid electric vehicle based on improved dynamic programming
[J].
Modeling and control of a power-split hybrid vehicle
[J].
基于等效油耗最小的四驱混合动力汽车能量管理
[J].DOI:10.3969/j.issn.1004-132X.2017.09.019 [本文引用: 2]
Energy management of a 4WD hybrid electric vehicle based on ECMS
[J].DOI:10.3969/j.issn.1004-132X.2017.09.019 [本文引用: 2]
基于DP-ECMS的插电式混合动力城市客车能量管理策略研究
[J].
A research on energy management strategy for a p1ug-in hybrid electric bus based on DP-ECMS strategy
[J].
Estimation of the ECMS equivalent factor bounds for hybrid electric vehicles
[J].
Multi-step reinforcement learning for model-free predictive energy management of an electrified off-highway vehicle
[J].DOI:10.1016/j.apenergy.2019.113755 [本文引用: 1]
混合动力汽车连续信号灯路口的通行优化
[J].DOI:10.3969/j.issn.1001-7372.2017.10.015 [本文引用: 1]
Multi-segment green light optimal speed advisory for hybrid vehicles
[J].DOI:10.3969/j.issn.1001-7372.2017.10.015 [本文引用: 1]
智能网联环境下的混合动力汽车分层能量管理
[J].
Hierarchical energy management of hybrid electric vehicles under the environment of intelligent and connected vehicles
[J].
车联网环境下车辆最优车速闭环快速模型预测控制
[J].DOI:10.3969/j.issn.1004-132X.2017.10.018 [本文引用: 2]
A closed-loop FMPC of optimal velocities for connected vehicles
[J].DOI:10.3969/j.issn.1004-132X.2017.10.018 [本文引用: 2]
A parallel hybrid electric vehicle energy management strategy using stochastic model predictive control with road grade preview
[J].DOI:10.1109/TCST.2015.2409235 [本文引用: 1]
Hybrid electric vehicle two-step fuel efficiency optimization with decoupled energy management and speed control
[J].DOI:10.1109/TVT.2019.2948192 [本文引用: 1]
Optimal energy management and velocity control of hybrid electric vehicles
[J].
基于道路坡度实时信息的经济车速优化方法
[J].DOI:10.3969/j.issn.1674-8484.2014.03.006 [本文引用: 1]
Eco speed optimization based on real-time information of road gradient
[J].DOI:10.3969/j.issn.1674-8484.2014.03.006 [本文引用: 1]
智能四驱电动汽车预测节能控制研究
[J].
Predictive energy saving control for intelligent 4WD electric vehicle
[J].
Instantaneous feedback control for a fuel-prioritized vehicle cruising system on highways with a varying slope
[J].
Integrated energy-oriented cruising control of electric vehicle on highway with varying slopes considering battery aging
[J].DOI:10.1007/s11431-019-9559-2 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}