[1]
WU S, QIU X, USERY, et al Using geometrical, textural, and contextual information of land parcels for classification of detailed urban land use
[J]. Annals of the Association of American Geographers , 2009 , 99 (1 ): 76 - 98
DOI:10.1080/00045600802459028
[本文引用: 1]
[2]
LU Z, IM J, RHEE J, et al Building type classification using spatial and landscape attributes derived from LiDAR remote sensing data
[J]. Landscape and Urban Planning , 2014 , 130 : 134 - 148
DOI:10.1016/j.landurbplan.2014.07.005
[本文引用: 2]
[3]
LU Z, IM J, QUACKENBUSH L A volumetric approach to population estimation using LiDAR remote sensing
[J]. Photogrammetric Engineering and Remote Sensing , 2011 , 77 (11 ): 1145 - 1156
DOI:10.14358/PERS.77.11.1145
[本文引用: 1]
[5]
沈蔚, 李京, 陈云浩, 等 基于LIDAR数据的建筑轮廓线提取及规则化算法研究
[J]. 遥感学报 , 2008 , 12 (5 ): 692 - 698
URL
[本文引用: 1]
SHEN Wei, LI Jing, CHEN Yun-hao, et al Algorithms study of building boundary extraction and normalization based on LIDAR data
[J]. Journal of Remote Sensing , 2008 , 12 (5 ): 692 - 698
URL
[本文引用: 1]
[6]
YU B, LIU H, WU J, et al Automated derivation of urban building density information using airborne LiDAR data and object-based method
[J]. Landscape and Urban Planning , 2010 , 98 (3 ): 210 - 219
URL
[7]
RUTZINGER M, ROTTENSTEINER F, PFEIFER N A comparison of evaluation techniques for building extraction from airborne laser scanning
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2009 , 2 (1 ): 11 - 20
DOI:10.1109/JSTARS.2009.2012488
[8]
闫利, 魏峰 利用密集匹配点云的建筑单体提取算法研究
[J]. 中国激光 , 2018 , 45 (7 ): 270 - 277
URL
[本文引用: 1]
YAN Li, WEI Feng Single part of building extraction from dense matching point cloud
[J]. Chinese Journal of Lasers , 2018 , 45 (7 ): 270 - 277
URL
[本文引用: 1]
[9]
AWRANGJEB M, RAVANBAKHSH M, FRASER C Automatic detection of residential buildings using LIDAR data and multispectral imagery
[J]. ISPRS Journal of Photogrammetry and Remote Sensing , 2010 , 65 (5 ): 457 - 467
DOI:10.1016/j.isprsjprs.2010.06.001
[本文引用: 1]
[10]
GEVAERT C, PERSELLO C, SLIUZAS R, et al Informal settlement classification using point-cloud and image-based features from UAV data
[J]. ISPRS Journal of Photogrammetry and Remote Sensing , 2017 , 125 : 225 - 236
DOI:10.1016/j.isprsjprs.2017.01.017
[本文引用: 1]
[11]
TSE R, GOLD C, KIDNER D. Using the delaunay triangulation/voronoi diagram to extract building information from raw LIDAR data[C]// Proceedings of the 4th International Symposium on Voronoi Diagrams in Science and Engineering . Glamorgan: IEEE, 2007: 222–229.
[本文引用: 1]
[12]
ALEXANDER C, SMITH-VOYSEY S, JARVIS C, et al Integrating building footprints and LiDAR elevation data to classify roof structures and visualize buildings
[J]. Computers, Environment and Urban Systems , 2009 , 33 (4 ): 285 - 292
DOI:10.1016/j.compenvurbsys.2009.01.009
[13]
戴玉成. 基于UAV倾斜影像匹配点云的城市建筑物信息提取方法研究[D]. 北京: 中国科学院大学, 2017.
[本文引用: 1]
DAI Yu-cheng. Urban building detection and reconstruction from point clouds derived from UAV oblique imagery[D]. Beijing: University of Chinese Academy of Sciences, 2017.
[本文引用: 1]
[14]
YANG L, SHENG Y, WANG B 3D reconstruction of building facade with fused data of terrestrial LiDAR data and optical image
[J]. Optik , 2016 , 127 (4 ): 2165 - 2168
DOI:10.1016/j.ijleo.2015.11.147
[本文引用: 1]
[15]
魏征. 车载LiDAR点云中建筑物的自动识别与立面几何重建[D]. 武汉: 武汉大学, 2012.
[本文引用: 1]
WEI Zheng. Automated extraction of buildings and facades reconstruction from mobile lidar point clouds[D]. Wuhan: Wuhan University, 2012.
[本文引用: 1]
[16]
王琛. 我国集合住宅阳台政策规定对生活需求影响分析研究[D]. 北京: 清华大学, 2011.
[本文引用: 2]
WANG Chen. Theoretical analysis and study on balcony policy and regulations interaction to living requirement[D]. Beijing: Tsinghua University, 2011.
[本文引用: 2]
[17]
吕俊华, 彼得·罗, 张杰. 中国现代城市住宅 1840-2000[M]. 北京: 清华大学出版社, 2005.
[18]
胡仁禄, 周燕珉. 居住建筑设计原理[M]. 北京: 中国建筑工业出版社, 2007: 137-157.
[本文引用: 2]
[19]
杨洋, 张永生, 马一薇 基于LIDAR数据的建筑物轮廓提取
[J]. 测绘科学 , 2010 , 35 (3 ): 203 - 205
URL
[本文引用: 1]
YANG Yang, ZHANG Yong-sheng, MA Yi-wei The study on building boundary extraction based on LIDAR data
[J]. Science of Surveying and Mapping , 2010 , 35 (3 ): 203 - 205
URL
[本文引用: 1]
[21]
MOUNTRAKIS G, IM J, OGOLE C Support vector machines in remote sensing: a review
[J]. ISPRS Journal of Photogrammetry and Remote Sensing , 2011 , 66 (3 ): 247 - 259
DOI:10.1016/j.isprsjprs.2010.11.001
[本文引用: 1]
[24]
MARTINEZ J, SORIA A, ARIAS P, et al Automatic processing of terrestrial laser scanning data of building facades
[J]. Automation in construction , 2012 , 22 (3 ): 298 - 305
URL
[本文引用: 1]
[25]
付祥钊. 夏热冬冷地区建筑节能技术[M]. 北京: 中国建筑工业出版社, 2002: 45-59.
[本文引用: 1]
[26]
赵芹. 城市居住地块形态特征研究与表述[D]. 南京: 南京大学, 2015.
[本文引用: 1]
ZHAO Qin. Study and description of morphological characteristics of residential plots[D]. Nanjing: Nanjing University, 2015.
[本文引用: 1]
Using geometrical, textural, and contextual information of land parcels for classification of detailed urban land use
1
2009
... 房屋信息数据,如平面轮廓、层数、结构类型、建造年代、使用类型、居住情况等参数,是城市信息管理及各类规划的基础[1 ] . 房屋使用类型分类信息广泛应用于人口统计、社会经济学建模、韧性城市分析、自然灾害损失及伤亡评估等众多研究领域[2 -3 ] . 我国部分地区房屋基础数据匮乏,通过现场测绘与调查获取房屋信息费时费力,难以满足当前的数据需求. 广泛应用的机载雷达扫描技术及倾斜摄影测量技术[4 ] 为房屋信息的快速获取提供了新的方法. ...
Building type classification using spatial and landscape attributes derived from LiDAR remote sensing data
2
2014
... 房屋信息数据,如平面轮廓、层数、结构类型、建造年代、使用类型、居住情况等参数,是城市信息管理及各类规划的基础[1 ] . 房屋使用类型分类信息广泛应用于人口统计、社会经济学建模、韧性城市分析、自然灾害损失及伤亡评估等众多研究领域[2 -3 ] . 我国部分地区房屋基础数据匮乏,通过现场测绘与调查获取房屋信息费时费力,难以满足当前的数据需求. 广泛应用的机载雷达扫描技术及倾斜摄影测量技术[4 ] 为房屋信息的快速获取提供了新的方法. ...
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
A volumetric approach to population estimation using LiDAR remote sensing
1
2011
... 房屋信息数据,如平面轮廓、层数、结构类型、建造年代、使用类型、居住情况等参数,是城市信息管理及各类规划的基础[1 ] . 房屋使用类型分类信息广泛应用于人口统计、社会经济学建模、韧性城市分析、自然灾害损失及伤亡评估等众多研究领域[2 -3 ] . 我国部分地区房屋基础数据匮乏,通过现场测绘与调查获取房屋信息费时费力,难以满足当前的数据需求. 广泛应用的机载雷达扫描技术及倾斜摄影测量技术[4 ] 为房屋信息的快速获取提供了新的方法. ...
UAV for 3D mapping applications: a review
1
2014
... 房屋信息数据,如平面轮廓、层数、结构类型、建造年代、使用类型、居住情况等参数,是城市信息管理及各类规划的基础[1 ] . 房屋使用类型分类信息广泛应用于人口统计、社会经济学建模、韧性城市分析、自然灾害损失及伤亡评估等众多研究领域[2 -3 ] . 我国部分地区房屋基础数据匮乏,通过现场测绘与调查获取房屋信息费时费力,难以满足当前的数据需求. 广泛应用的机载雷达扫描技术及倾斜摄影测量技术[4 ] 为房屋信息的快速获取提供了新的方法. ...
基于LIDAR数据的建筑轮廓线提取及规则化算法研究
1
2008
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
基于LIDAR数据的建筑轮廓线提取及规则化算法研究
1
2008
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
Automated derivation of urban building density information using airborne LiDAR data and object-based method
0
2010
A comparison of evaluation techniques for building extraction from airborne laser scanning
0
2009
利用密集匹配点云的建筑单体提取算法研究
1
2018
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
利用密集匹配点云的建筑单体提取算法研究
1
2018
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
Automatic detection of residential buildings using LIDAR data and multispectral imagery
1
2010
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
Informal settlement classification using point-cloud and image-based features from UAV data
1
2017
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
1
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
Integrating building footprints and LiDAR elevation data to classify roof structures and visualize buildings
0
2009
1
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
1
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
3D reconstruction of building facade with fused data of terrestrial LiDAR data and optical image
1
2016
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
1
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
1
... 低空倾斜摄影测量技术或雷达技术获得的密集匹配点云能够反映房屋的空间信息,可以用于快速获得房屋的轮廓[5 -8 ] . 国内外学者融合航空影像与点云数据,进一步优化房屋提取准确性. Awrangjeb等[9 ] 基于机载雷达点云及影像检测房屋轮廓,Gevaert等[10 ] 融合2D与3D信息,完成复杂村落中包括房屋在内的地物分类. 房屋三维点云可以很好地反映房屋的空间特征,利用航空点云数据能够分析屋顶的空间特征[11 -13 ] ,利用车载激光雷达点云,可以识别房屋窗户细部特征[14 -15 ] . 房屋点云还被用于房屋间接属性的提取. Lu等[2 ] 利用机载雷达点云数据中房屋及周围地物的多种特征,通过机器学习完成房屋使用类型分类. 既有的房屋点云研究多为单体房屋点云的分割分类及三维重构,鲜有基于区域点云数据提取各单体房屋参数及属性的研究. 为了快速获取房屋的使用类型,本文提出利用倾斜摄影测量数据快速识别老城区住宅的方法. ...
2
... 老城区(2000年以前)的典型住宅为多层板式住宅,具有如下特征[16 -18 ] . 1)具有挑出的矩形阳台构造. 2)平立面形体规则且主立面朝南. 3)面宽大于进深,如图3 所示. 嘉兴老城区住宅以70~90年代为主,几乎都具备上述特征,在空间形态上与非住宅建筑存在明显区别,可以通过房屋点云反映上述空间特征. 本文将借助点云数据完成典型住宅的自动识别. 提取房屋轮廓,获得单体化房屋的点云数据. 基于随机抽样一致性算法(random sample consenzsus,RANSAC)分割单体化房屋点云,得到房屋立面点云. 通过分析立面的空间特征,判断是否为典型住宅,流程如图4 所示. ...
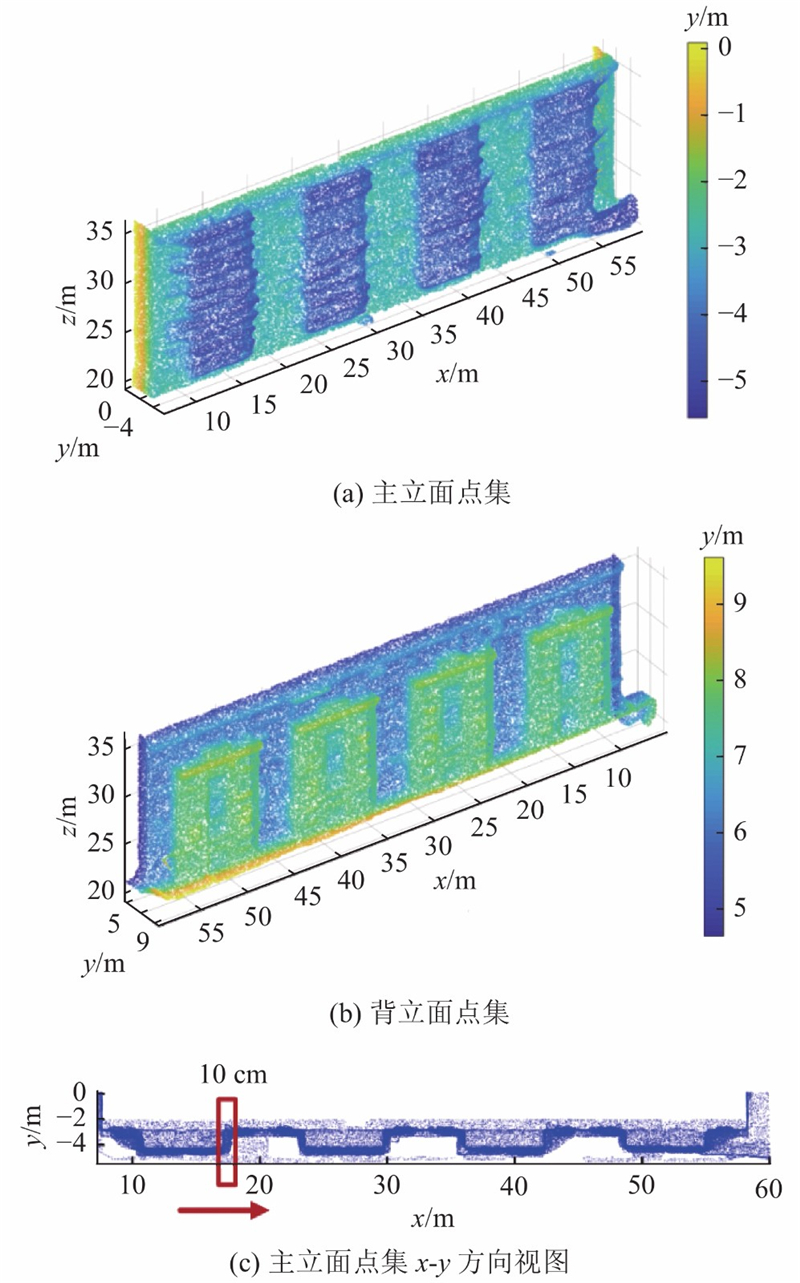
... 我国住宅在70年代开始出现敞开式南向阳台,80年代阳台开始在集合住宅中流行[16 ] . 抽取嘉兴老城区的60栋典型住宅样本,统计分析发现,92%的样本都具有挑出矩形阳台构造,符合上述结论. 杭州地区朝向宜设置为南向至南偏东10°~15°[25 ] ,结合现场调查取10°阈值. 赵芹[26 ] 指出,住宅进深多为11~13 m,本文结合调查设置阈值为10 m. 住宅长宽比与单元数有关,最小值为两户四开间15 m面宽、10 m进深的住宅,即长宽比为1.5[18 ] . 满足以下3个条件,即可判定为住宅. 1)检测出立面存在阳台构造;2)主立面与侧立面长度满足:侧立面长度应不小于10 m,主立面与侧立面长度之比大于1.5;3)主立面朝向与南北向的夹角小于10°. ...
2
... 老城区(2000年以前)的典型住宅为多层板式住宅,具有如下特征[16 -18 ] . 1)具有挑出的矩形阳台构造. 2)平立面形体规则且主立面朝南. 3)面宽大于进深,如图3 所示. 嘉兴老城区住宅以70~90年代为主,几乎都具备上述特征,在空间形态上与非住宅建筑存在明显区别,可以通过房屋点云反映上述空间特征. 本文将借助点云数据完成典型住宅的自动识别. 提取房屋轮廓,获得单体化房屋的点云数据. 基于随机抽样一致性算法(random sample consenzsus,RANSAC)分割单体化房屋点云,得到房屋立面点云. 通过分析立面的空间特征,判断是否为典型住宅,流程如图4 所示. ...
... 我国住宅在70年代开始出现敞开式南向阳台,80年代阳台开始在集合住宅中流行[16 ] . 抽取嘉兴老城区的60栋典型住宅样本,统计分析发现,92%的样本都具有挑出矩形阳台构造,符合上述结论. 杭州地区朝向宜设置为南向至南偏东10°~15°[25 ] ,结合现场调查取10°阈值. 赵芹[26 ] 指出,住宅进深多为11~13 m,本文结合调查设置阈值为10 m. 住宅长宽比与单元数有关,最小值为两户四开间15 m面宽、10 m进深的住宅,即长宽比为1.5[18 ] . 满足以下3个条件,即可判定为住宅. 1)检测出立面存在阳台构造;2)主立面与侧立面长度满足:侧立面长度应不小于10 m,主立面与侧立面长度之比大于1.5;3)主立面朝向与南北向的夹角小于10°. ...
2
... 老城区(2000年以前)的典型住宅为多层板式住宅,具有如下特征[16 -18 ] . 1)具有挑出的矩形阳台构造. 2)平立面形体规则且主立面朝南. 3)面宽大于进深,如图3 所示. 嘉兴老城区住宅以70~90年代为主,几乎都具备上述特征,在空间形态上与非住宅建筑存在明显区别,可以通过房屋点云反映上述空间特征. 本文将借助点云数据完成典型住宅的自动识别. 提取房屋轮廓,获得单体化房屋的点云数据. 基于随机抽样一致性算法(random sample consenzsus,RANSAC)分割单体化房屋点云,得到房屋立面点云. 通过分析立面的空间特征,判断是否为典型住宅,流程如图4 所示. ...
... 我国住宅在70年代开始出现敞开式南向阳台,80年代阳台开始在集合住宅中流行[16 ] . 抽取嘉兴老城区的60栋典型住宅样本,统计分析发现,92%的样本都具有挑出矩形阳台构造,符合上述结论. 杭州地区朝向宜设置为南向至南偏东10°~15°[25 ] ,结合现场调查取10°阈值. 赵芹[26 ] 指出,住宅进深多为11~13 m,本文结合调查设置阈值为10 m. 住宅长宽比与单元数有关,最小值为两户四开间15 m面宽、10 m进深的住宅,即长宽比为1.5[18 ] . 满足以下3个条件,即可判定为住宅. 1)检测出立面存在阳台构造;2)主立面与侧立面长度满足:侧立面长度应不小于10 m,主立面与侧立面长度之比大于1.5;3)主立面朝向与南北向的夹角小于10°. ...
基于LIDAR数据的建筑物轮廓提取
1
2010
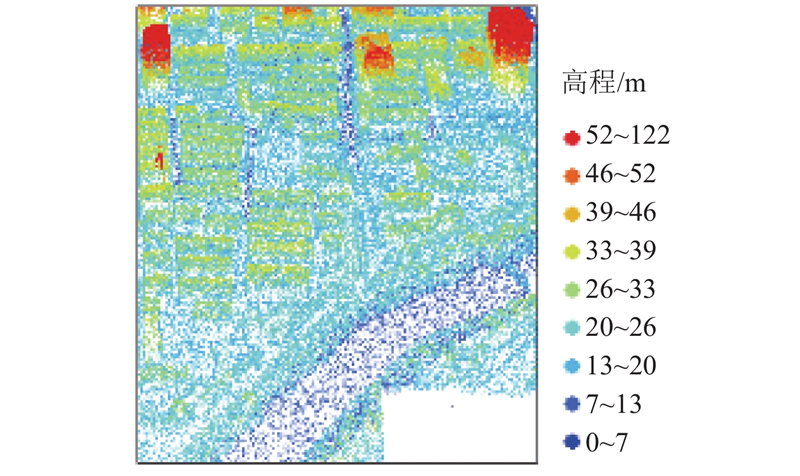
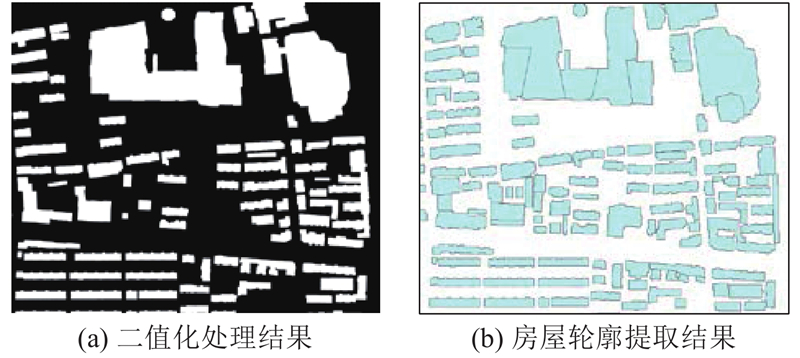
... 利用DSM和DOM提取房屋轮廓. 提取DSM中的地面点插值生成DEM,计算DSM与DEM的差值,得到归一化的DSM(nDSM,normalized digital surface model)[19 ] . 如图5(a) 所示,nDSM表达地物的高度信息,明显高于地面的地物主要为植被和房屋,去除植被部分后可以利用高度阈值提取房屋[20 ] . ...
基于LIDAR数据的建筑物轮廓提取
1
2010
... 利用DSM和DOM提取房屋轮廓. 提取DSM中的地面点插值生成DEM,计算DSM与DEM的差值,得到归一化的DSM(nDSM,normalized digital surface model)[19 ] . 如图5(a) 所示,nDSM表达地物的高度信息,明显高于地面的地物主要为植被和房屋,去除植被部分后可以利用高度阈值提取房屋[20 ] . ...
基于高分辨率遥感影像的DSM建筑物点的提取研究
1
2009
... 利用DSM和DOM提取房屋轮廓. 提取DSM中的地面点插值生成DEM,计算DSM与DEM的差值,得到归一化的DSM(nDSM,normalized digital surface model)[19 ] . 如图5(a) 所示,nDSM表达地物的高度信息,明显高于地面的地物主要为植被和房屋,去除植被部分后可以利用高度阈值提取房屋[20 ] . ...
基于高分辨率遥感影像的DSM建筑物点的提取研究
1
2009
... 利用DSM和DOM提取房屋轮廓. 提取DSM中的地面点插值生成DEM,计算DSM与DEM的差值,得到归一化的DSM(nDSM,normalized digital surface model)[19 ] . 如图5(a) 所示,nDSM表达地物的高度信息,明显高于地面的地物主要为植被和房屋,去除植被部分后可以利用高度阈值提取房屋[20 ] . ...
Support vector machines in remote sensing: a review
1
2011
... 采用支持向量机监督分类法,选择R、G、B三维颜色特征,利用ENVI软件在DOM中划定植被矢量轮廓[21 -22 ] ,DOM如图5(b) 所示. 初步分类的植被轮廓具有一定的噪声,采用形态学腐蚀运算去噪声后,得到的植被轮廓如图5(c) 所示. 剔除植被后的nDSM如图5(d) 所示. ...
基于支持向量机的高光谱遥感图像分类
1
2008
... 采用支持向量机监督分类法,选择R、G、B三维颜色特征,利用ENVI软件在DOM中划定植被矢量轮廓[21 -22 ] ,DOM如图5(b) 所示. 初步分类的植被轮廓具有一定的噪声,采用形态学腐蚀运算去噪声后,得到的植被轮廓如图5(c) 所示. 剔除植被后的nDSM如图5(d) 所示. ...
基于支持向量机的高光谱遥感图像分类
1
2008
... 采用支持向量机监督分类法,选择R、G、B三维颜色特征,利用ENVI软件在DOM中划定植被矢量轮廓[21 -22 ] ,DOM如图5(b) 所示. 初步分类的植被轮廓具有一定的噪声,采用形态学腐蚀运算去噪声后,得到的植被轮廓如图5(c) 所示. 剔除植被后的nDSM如图5(d) 所示. ...
Efficient RANSAC for point-cloud shape detection
1
2007
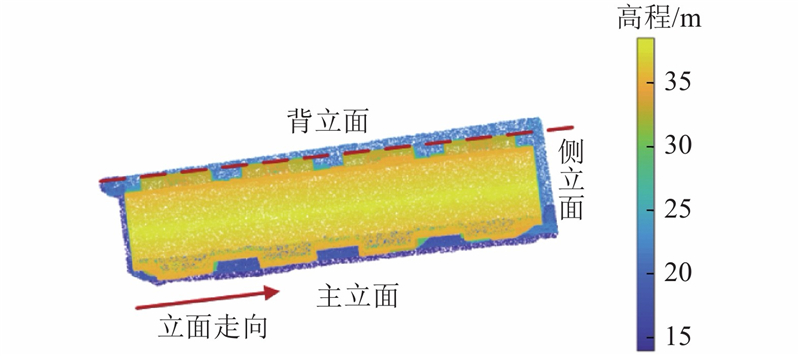
... 利用房屋轮廓对点云进行布尔运算,得到单体房屋点云. 如图7 所示,典型住宅平面轮廓为矩形,点数最多的2个立面为房屋主立面与背立面,与其垂直的立面为房屋侧立面,可以利用RANSAC算法[23 ] 进一步检测和分割房屋立面. 具体步骤如下. ...
Automatic processing of terrestrial laser scanning data of building facades
1
2012
... 1)利用铅直平面方程拟合房屋点集P 中的房屋立面,设置检测距离为0.2 m——点云精度的2倍[24 ] ,以精准地追踪立面走向. 利用RANSAC算法检测出点数最多的立面(如图7 的虚线所示),得到该立面方程. ...
1
... 我国住宅在70年代开始出现敞开式南向阳台,80年代阳台开始在集合住宅中流行[16 ] . 抽取嘉兴老城区的60栋典型住宅样本,统计分析发现,92%的样本都具有挑出矩形阳台构造,符合上述结论. 杭州地区朝向宜设置为南向至南偏东10°~15°[25 ] ,结合现场调查取10°阈值. 赵芹[26 ] 指出,住宅进深多为11~13 m,本文结合调查设置阈值为10 m. 住宅长宽比与单元数有关,最小值为两户四开间15 m面宽、10 m进深的住宅,即长宽比为1.5[18 ] . 满足以下3个条件,即可判定为住宅. 1)检测出立面存在阳台构造;2)主立面与侧立面长度满足:侧立面长度应不小于10 m,主立面与侧立面长度之比大于1.5;3)主立面朝向与南北向的夹角小于10°. ...
1
... 我国住宅在70年代开始出现敞开式南向阳台,80年代阳台开始在集合住宅中流行[16 ] . 抽取嘉兴老城区的60栋典型住宅样本,统计分析发现,92%的样本都具有挑出矩形阳台构造,符合上述结论. 杭州地区朝向宜设置为南向至南偏东10°~15°[25 ] ,结合现场调查取10°阈值. 赵芹[26 ] 指出,住宅进深多为11~13 m,本文结合调查设置阈值为10 m. 住宅长宽比与单元数有关,最小值为两户四开间15 m面宽、10 m进深的住宅,即长宽比为1.5[18 ] . 满足以下3个条件,即可判定为住宅. 1)检测出立面存在阳台构造;2)主立面与侧立面长度满足:侧立面长度应不小于10 m,主立面与侧立面长度之比大于1.5;3)主立面朝向与南北向的夹角小于10°. ...
1
... 我国住宅在70年代开始出现敞开式南向阳台,80年代阳台开始在集合住宅中流行[16 ] . 抽取嘉兴老城区的60栋典型住宅样本,统计分析发现,92%的样本都具有挑出矩形阳台构造,符合上述结论. 杭州地区朝向宜设置为南向至南偏东10°~15°[25 ] ,结合现场调查取10°阈值. 赵芹[26 ] 指出,住宅进深多为11~13 m,本文结合调查设置阈值为10 m. 住宅长宽比与单元数有关,最小值为两户四开间15 m面宽、10 m进深的住宅,即长宽比为1.5[18 ] . 满足以下3个条件,即可判定为住宅. 1)检测出立面存在阳台构造;2)主立面与侧立面长度满足:侧立面长度应不小于10 m,主立面与侧立面长度之比大于1.5;3)主立面朝向与南北向的夹角小于10°. ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}