

盾构机掘进荷载取决于掘进过程中盾构机和土体之间的相互作用,准确计算机土相互作用是控制盾构掘进行为、调整盾构掘进姿态的重要依据. 影响机土相互作用的因素众多,其中盾构掘进行为是关键因素之一,尤其影响盾壳上的负载. 盾构在掘进过程中不能保证盾构机中线始终与隧道设计轴线重合,产生沿隧道纵向波动的曲线开挖边界,工程界将盾构机的这种掘进运动特性称为盾构机的蛇形运动. 这种蛇形运动直接决定盾壳和土体间的动态接触作用,影响盾壳上的荷载及分布. Festa等[1-2]考虑盾构掘进的运动特征和盾构几何特征,建立4种曲线掘进模型,描述了盾构运动特征和几何特性对盾构机和周围土体相互作用的影响,计算出了盾构机和土体接触位移. 目前,盾壳上荷载计算普遍借用盾构隧道荷载的计算模型. 周奇才等[3]采用全覆土重法计算盾壳上部土压力,考虑盾构机重量计算盾壳下部土压力,引入侧压力系数计算两侧土压力. 邓孔书[4]以土柱理论和压力拱理论为基础,考虑盾构机变形产生的土体反力,计算盾构上土压力. 上述方法均不能反映盾构掘进行为对盾壳上土压力的影响. Sugimoto等[5-6]提出盾壳上土压力必须考虑盾构掘进行为的影响,根据盾构受力平衡的条件,基于地基反力曲线,采用等效弹簧的方式模拟盾构与土的相互作用关系,建立盾构机姿态调整量和盾构上土压力改变量的关系. 沈翔等[7]在Sugimoto模型的基础之上,考虑盾构俯仰角,建立盾构机-土体相互作用模型,推导盾构机的弯矩平衡方程. Sugimoto等[5-6, 8]所提方法的不便之处在于地基反力曲线须结合地层参数、采用有限元方法进行参数确定[8],不利于工程的应用.
考虑到盾构和土体的相互作用本质上可以简化为特殊接触边界条件下土体和结构的变形问题,本文将复变函数方法引入到盾构和土体相互作用的问题,将盾构掘进行为扩展为符合盾构机-土体接触条件的洞周位移模式,以地层附加应力为突破点,分析盾构掘进行为对盾构机-土体接触应力的影响,提出盾构掘进行为产生的盾壳-土体附加接触应力计算方法. 建立盾构机力和力矩增量的平衡方程,研究成果为盾构姿态调整提供了理论参考.
1. 盾构掘进对周围土体应力状态的影响
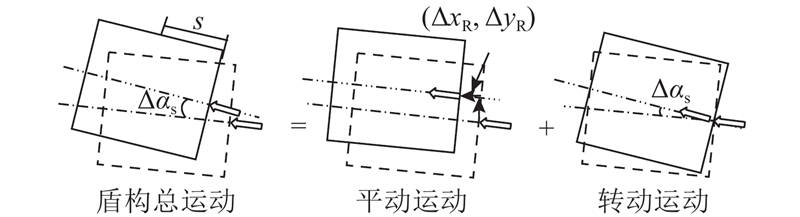
盾构机的掘进行为可以通过盾构偏移轨迹和盾构机姿态角(包括俯仰角和水平偏角)进行描述. 掘进行为对盾壳周围土体的影响如图1所示,可以分为以下5个阶段. 1)盾构掘进姿态角为零,盾构机平行隧道轴线掘进. 2)盾构姿态角逐渐增大,盾构机轴线沿远离隧道轴线方向转动,并发生侧向位移. 3)盾构姿态角非零且保持不变,盾构机与隧道轴线保持一定角度掘进. 4)盾构姿态角逐渐减小,盾构机轴线向隧道轴线转动,并发生侧向位移. 5)盾构姿态角为负,盾构机向隧道轴线转动,并发生侧向位移,是阶段4)的延续.
图 1
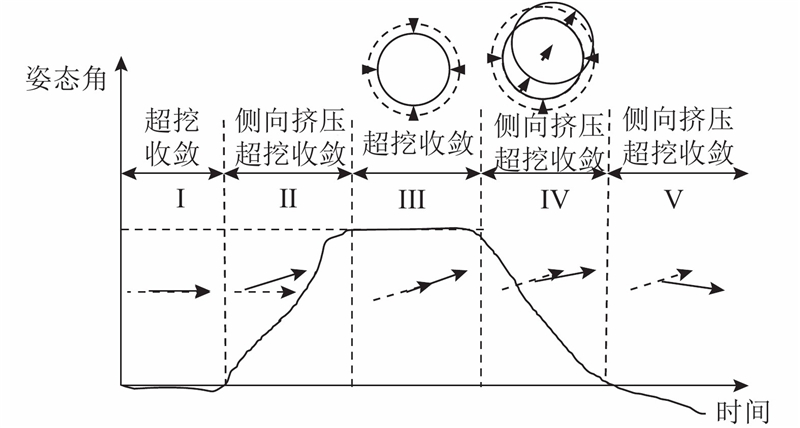
图 1 掘进姿态角对机土相对位移的影响
Fig.1 Relative displacement of machine-soil under different driving attitude
图 2
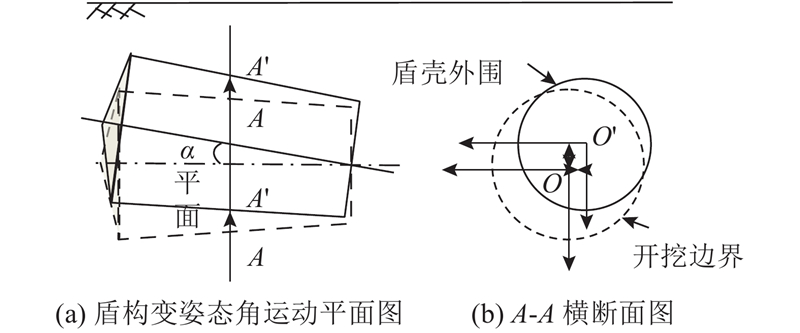
图 2 掘进中盾构与土体的接触关系
Fig.2 Contact relationship between shield and soil during excavation
由于盾构机和其掘进行为的存在,产生的机-土相对位移将对盾构周围土体产生附加应力,改变盾构周围土体及接触面上的应力状态,如下所示:
式中:
2. 盾壳-土体附加接触应力
2.1. 盾壳-土体相互作用模型
在盾构掘进过程中,盾构机-土体相对位移不仅沿横向不均匀分布,沿纵向也具有一定的非均匀性,同时探讨横向和纵向不均匀位移下机-土相互作用是困难的. 考虑到机-土相对位移远小于盾体长度,单位长度上机-土相对位移仅相差1~5 mm(盾构方向偏角一般控制小于5 mm/m),不均匀分布率为0.001~0.005. 假定盾壳-土体相对位移沿纵向均匀分布,盾壳-土体变形模型基本符合平面应变条件,则以盾构周围土体为研究对象,将盾壳-土体相互作用模型简化为含孔洞的弹性半空间平面应变问题,将盾构掘进行为对周围土体的影响转化为洞周位移模式,研究掘进行为对盾壳-土体接触应力的影响. 该模型遵循以下假定.
1)土体发生弹性变形,土体应力状态与应力历史无关.
2)盾构机不发生变形,只产生刚体移动.
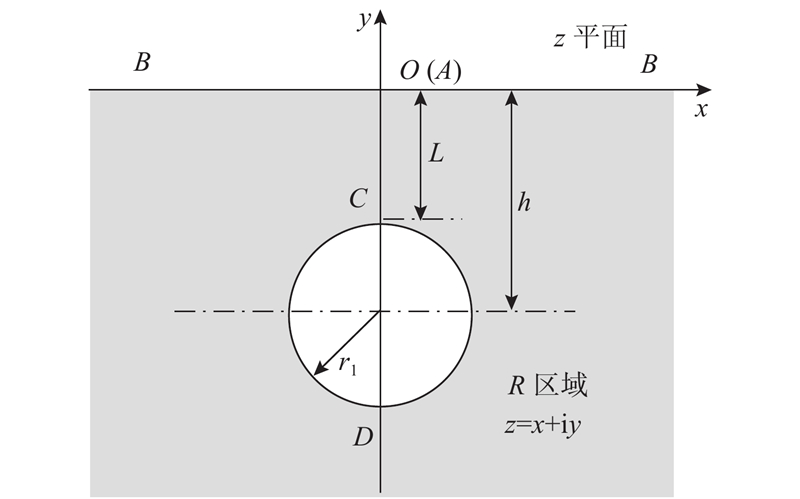
在图3所示的直角坐标系中,r1为盾构开挖洞室半径,h为盾构中心距地表的垂直距离,L为盾构覆土厚度,A为坐标原点,B为无穷远处点,C为开挖洞室顶点,D为开挖洞室最低点,R区域为开挖洞室外围土体.
图 3
2.2. 复变函数求解
2.2.1. 解析函数
根据复变函数解法可知,当盾构机和周围土体接触面上发生相对位移时,盾构周围土体的附加应力和位移分量可以由2个在R区域内的解析函数
位移公式为
式中:G为切变模量,
在z平面,边界条件为
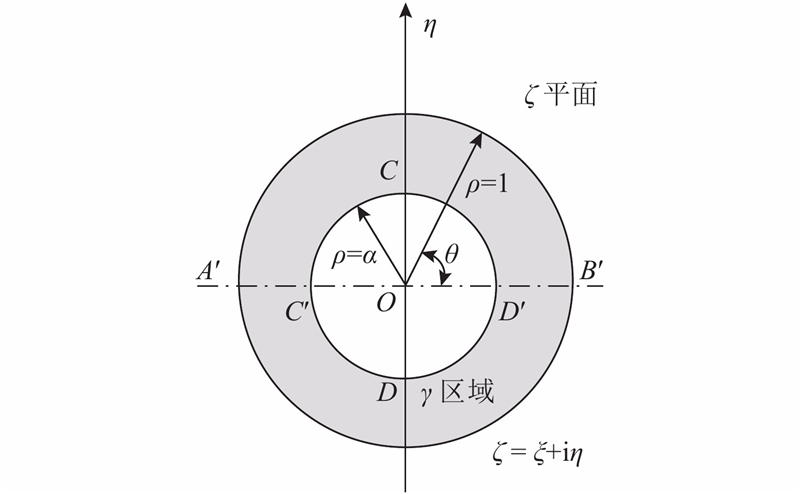
2.2.2. 共形映射
采用共形映射函数
图 4
2.2.3. 解析函数的Laurent级数展开
式中:
令
2.2.4. 按 $\zeta $
1)应力边界条件.
将地表应力条件转化到复平面中,可得
将式(6)~(8)代入式(10),可得
式中:
2)位移边界条件.
将式(5)映射到复平面中,可得
令
将式(6)~(8)、(11)、(12)代入式(13),可得
式中:A0、A1、Ak为傅里叶级数参数,可以通过开挖洞室圆周上的位移边界条件计算得到. 由此可知,当A0、A1和
2.3. 考虑盾构机掘进行为的机土相对位移模式
根据盾构掘进特点,将盾构横断面机-土体相对位移分为以下2部分. 第1部分为盾构超挖间隙引起的均匀径向位移,用于描述刀盘开挖土体产生的洞室边界发生径向位移,收敛于盾构外围的过程. 第2部分为盾构偏移运动产生的侧向挤压位移,描述盾构机姿态角的改变导致盾构机对周围土体的挤压和卸载作用.
孔洞边界径向位移采用Verruijt[9]提出的计算公式,各项系数如下所示:
式中:径向位移u0指向开挖洞室圆心时为正.
图 5
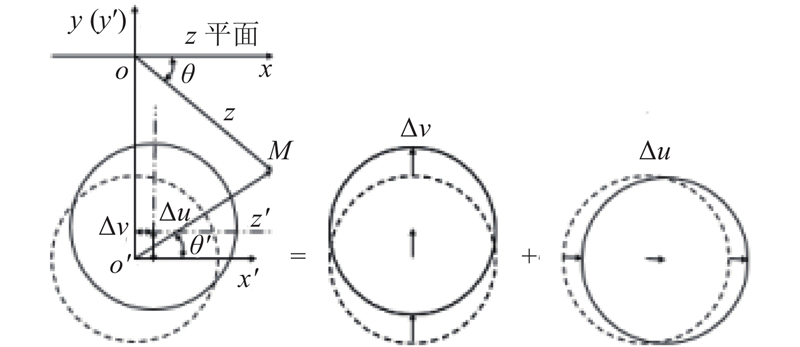
图 5 盾构偏移产生的位移边界条件
Fig.5 Displacement boundary conditions due to shield migration
目前较常用的洞周变形模式为径向收敛、椭圆化及竖向位移[13],没有洞周发生横向位移时的径向位移函数. 考虑到同样具有横向挤压特征的椭圆化和轮廓类似的竖向位移模式(式(16))均采用洞周径向位移近似服从三角函数分布的假定,结合两者,假定当盾构发生水平偏移位移
则洞室边界圆周上总的径向位移为
由于洞室边界上任一点直角坐标系
则
将式(20)代入式(18),可得复平面上内圆环
将式(6)、(20)和
由式(13)、
将式(15)和(23)叠加,得到盾构刀盘超挖径向位移和侧向位移叠加的合位移对应的傅里叶级数的对应系数.
2.4. 迭代求解
根据Verruij[9]提出的方法可知,要想使解析函数的级数展开式收敛于
3. 数值验证
为了验证本文理论的合理性和适用性,以某软土地层为例,采用Abaqus有限元软件进行三维建模,与所提理论进行对比分析. 采用的盾构机刀盘直径为6.28 m,盾构机头部直径为6.25 m,盾尾直径为6.23 m,盾构机长度为10 m. 如图6所示,建立三维数值模型,模型尺寸长50 m,宽50 m,高40 m,洞室开挖直径为6.28 m,轴线埋深为12 m. 单元最大尺寸为4 m,最小尺寸为0.5 m,共建立14 837个单元. 土体采用弹性本构模型,相关参数如表1所示. 表中,Es为压缩模量,μ 为泊松比,γ为重度,K0为侧压力系数. 土体弹性模量参考上海地区,取土体压缩模量的2~3.05倍,本文取3倍. 假设盾构机向上产生3 mm/m的仰角增量,向右产生3 mm/m的水平偏角增量,盾尾竖向和水平方向偏移量为零,盾构机上各位置开挖半径均为3.14 m. 考虑盾构机的楔形量影响,间隔2 m取一个计算断面,各盾周计算断面产生的机土相对位移如表2所示. 表中,s为距盾尾距离,r1为开挖半径,R为盾构外径,u0为均匀径向位移,Δv为盾构竖向偏移位移,Δu为盾构水平偏移位移. 通过分步施加3种位移边界条件,模拟盾构机-土体接触作用.
图 6
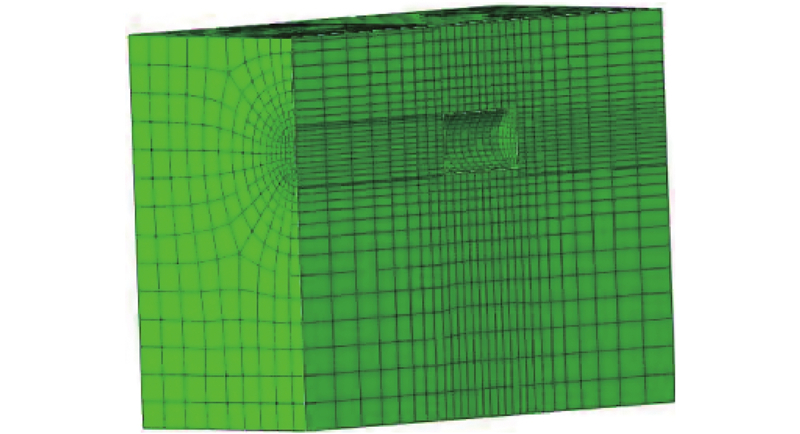
图 6 机-土接触作用三维数值模型
Fig.6 Three-dimensional numerical model of machine-soil contact
表 2 各断面的机土相对位移
Tab.2
| s /m | r1 /m | R /m | u0 /m | Δv /m | Δu /m |
| 0 | 3.14 | 3.115 | 0.025 | 0 | 0 |
| 2 | 3.14 | 3.117 | 0.023 | 0.006 | 0.006 |
| 4 | 3.14 | 3.119 | 0.021 | 0.012 | 0.012 |
| 6 | 3.14 | 3.121 | 0.019 | 0.018 | 0.018 |
| 8 | 3.14 | 3.123 | 0.017 | 0.024 | 0.024 |
| 10 | 3.14 | 3.125 | 0.015 | 0.030 | 0.030 |
取距盾尾6 m断面的数值模拟结果与本文理论进行对比,如图7所示. 可以看出,理论和数值解沿洞周的分布规律基本一致,峰值处的理论计算结果较数值计算结果稍大. 其中径向收缩机土相对位移模式引起的应力偏差最小;水平机土相对位移引起的水平应力理论值和数值结果基本相同;竖向机土相对位移引起的竖向应力理论值和数值结果基本相同,说明在位移方向产生的接触应力受纵向不均匀位移影响较小.
图 7

选取不同位移模式下各计算断面上的代表性应力峰值
图 8
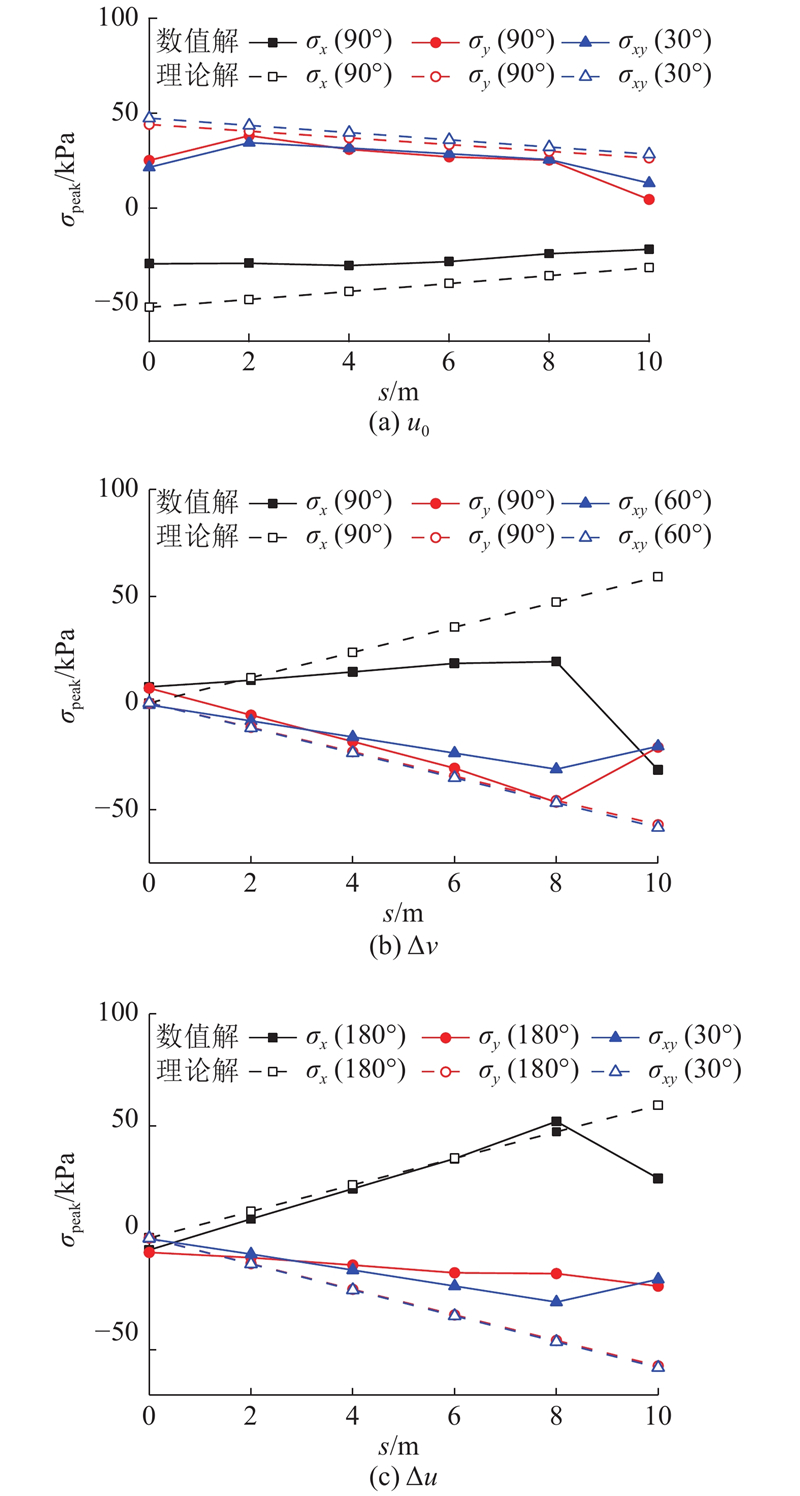
综上所述,除盾构端部一定范围外,平面应变假定所带来的机土附加接触应力计算误差较小,尤其是位移方向的应力,但由于纵向机土相对位移的非一致性,采用平面应变假定会在盾构端部产生一定的偏差. 产生偏差的原因主要是忽略了土体的纵向抗剪能力. 以盾首和盾尾为例,盾首断面左、右两侧土体相对盾首断面围岩有向下的位移趋势,将对盾首断面围岩产生向下的作用力,削弱盾首的附加接触应力. 盾尾断面左、右两侧土体有阻碍盾尾围岩变形的抗力作用,削弱盾尾的附加接触应力. 削弱程度受土体剪切刚度的影响,剪切刚度越大,削弱幅值越大,纵向不均匀位移的影响越显著.
4. 参数敏感性分析
4.1. 机土相对位移
图 9

图 9 不同机土相对位移下的盾构机-土体附加接触应力
Fig.9 Additional contact stress between shield machine and soil under different relative displacements
4.2. 盾构轴线埋深
盾构轴线埋深是盾构掘进荷载设计的一个主要变量,选取第3节的算例盾构机尺寸和土层参数,假设盾构机中间(z=5 m)断面产生径向收缩位移0.015 m,垂直向下的位移0.015 m和水平向右的位移0.015 m,以盾构轴线埋深为变量,得到盾构机掘进引起的盾构机土体附加接触应力,如图10所示. 可以看出,在相同的位移模式下,盾构掘进引起的机土附加接触应力随着埋深的增加基本保持不变,说明掘进运动引起的盾构机-土体附加接触应力受埋深的影响较小.
图 10
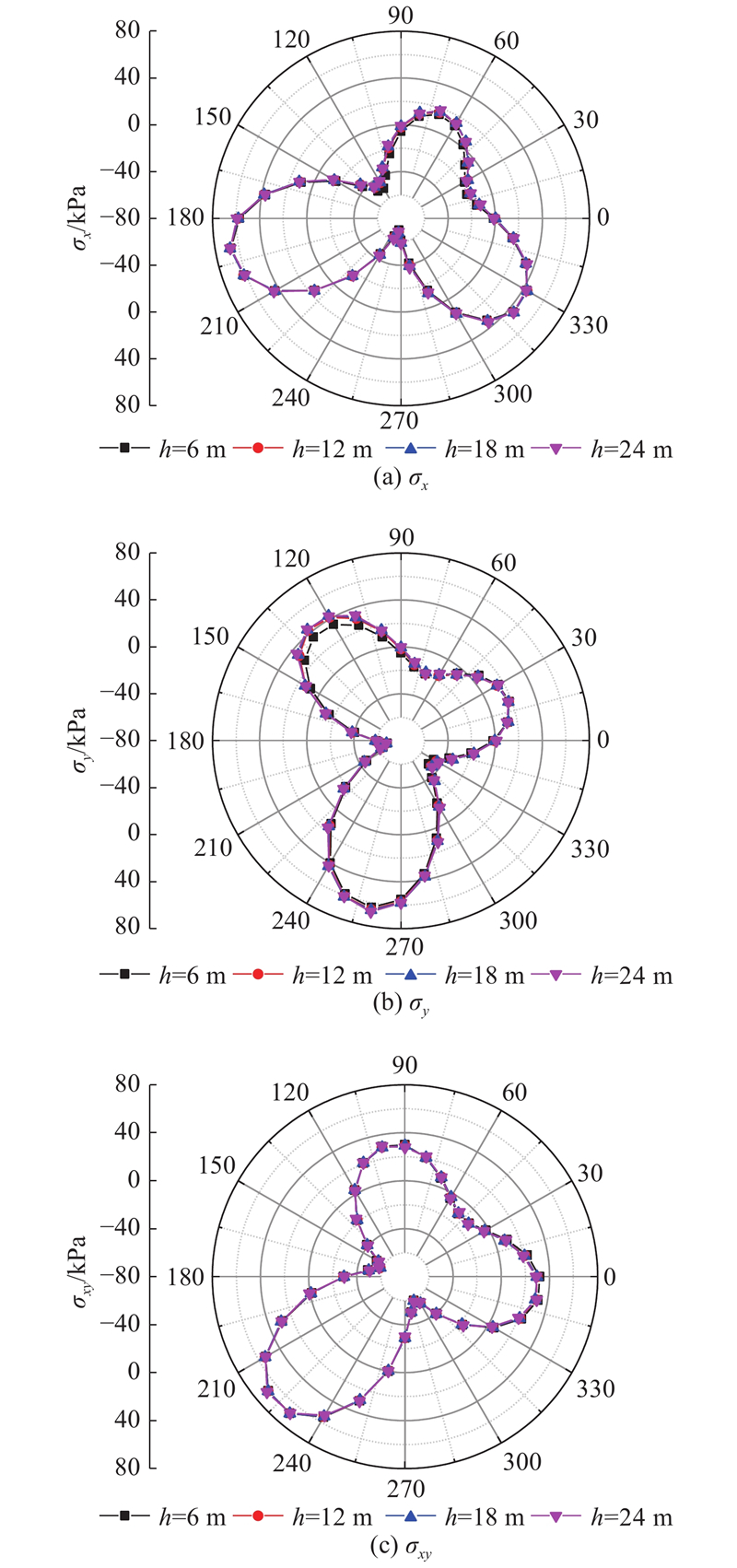
图 10 不同埋深下的机土附加接触应力
Fig.10 Additional contact stress between machine and soil under different burial depths
4.3. 土体泊松比、弹性模量
基于3章算例中的盾构机尺寸,假设盾构机中间(z=5 m)断面产生径向收缩位移0.015 m、垂直向下的位移0.015 m和水平向右的位移0.015 m,盾构轴线埋深为12 m,开展土体参数敏感性分析. 假定土体弹性模量为9.03 MPa,土体泊松比取0、0.5、1,得到盾构机掘进引起的盾壳-土体附加接触应力,如图11所示. 可知,随着泊松比的增加,各向附加应力逐渐减小,且与泊松比成线性反比关系. 取土体泊松比为0.491,土体弹性模量为9.03、20、50和100 MPa,得到盾构机掘进引起的盾壳-土体附加接触应力,如图12所示. 可知,随着弹性模量的增加,各向附加应力逐渐增大,且与弹性模量成正比例线性相关.
图 11
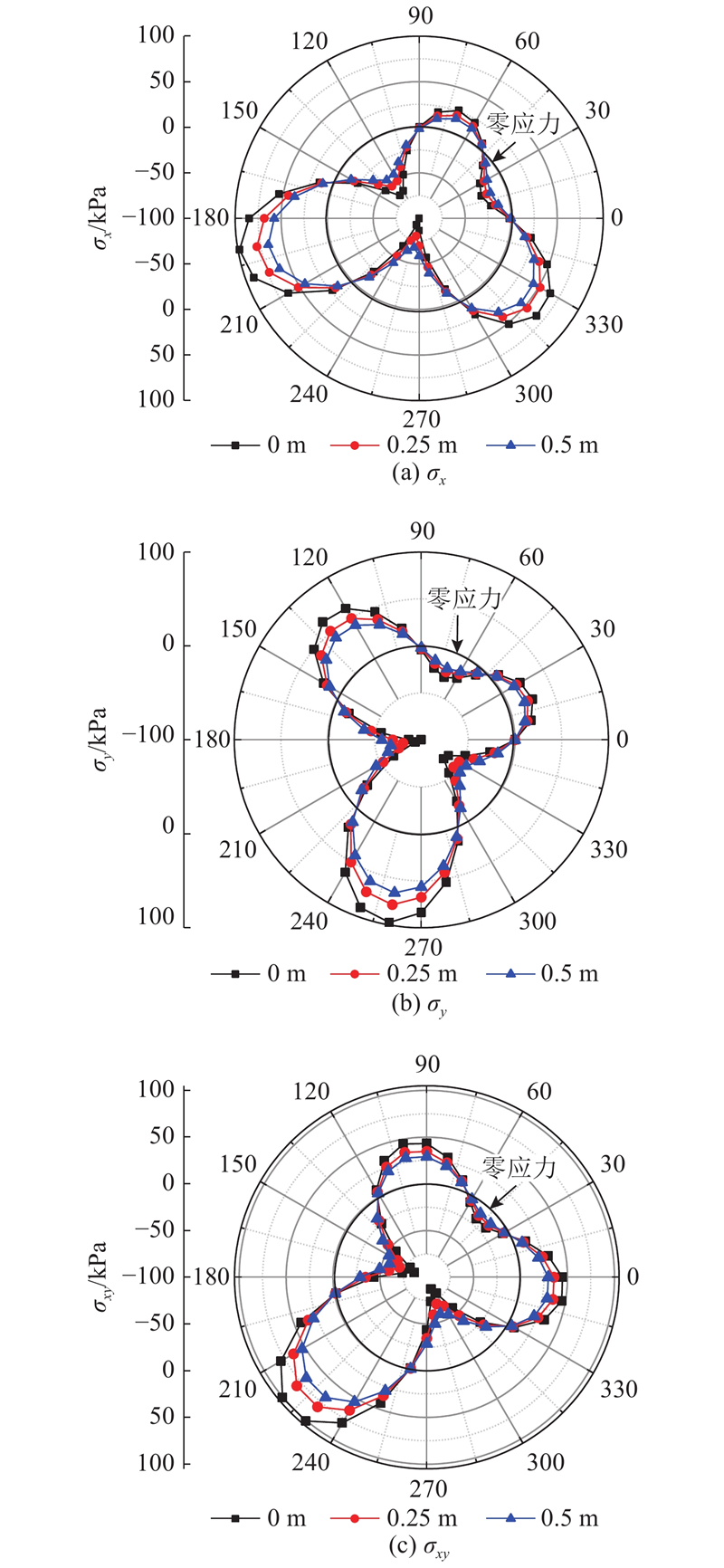
图 11 不同泊松比的机土附加接触应力
Fig.11 Additional contact stress between machine and soil with different Poisson’s ratios
图 12
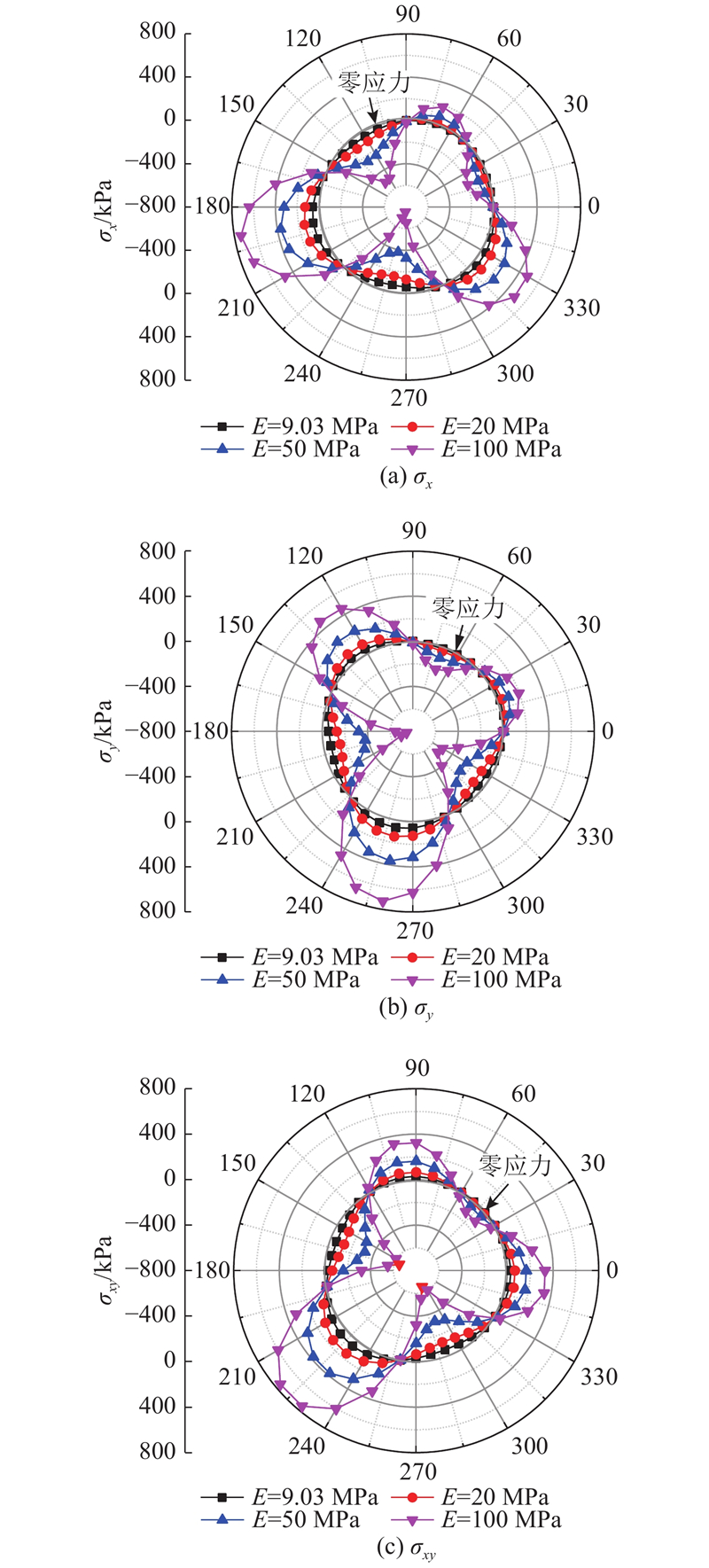
图 12 不同弹性模量的机土附加接触应力
Fig.12 Additional contact stress between machine and soil with different soil elastic module
5. 分析与讨论
5.1. 附加接触应力系数
通过上述敏感性分析可以看出,机土相对位移、弹性模量和泊松比对盾构掘进引起的盾壳-土体附加接触应力影响较大,盾构轴线埋深几乎没有影响. 经试算发现,洞周附加接触应力通过机土相对位移、弹性模量和泊松比归一化处理后为特定分布函数. 将特定分布函数定义为附加接触应力系数:
式中:
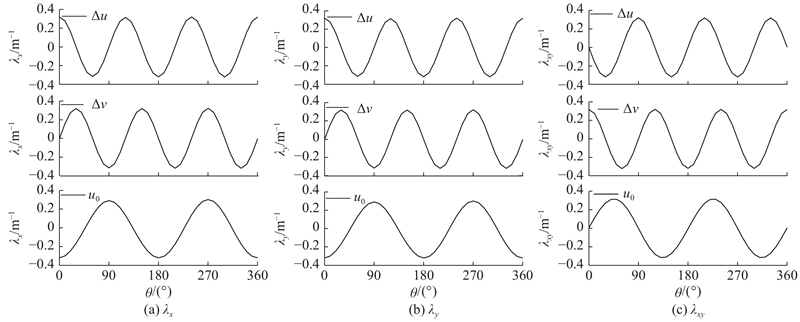
如图13所示为归一化处理后的应力系数分布函数,每个应力系数分量分别包含3个机土相对位移模式对应的子项. 该应力系数分布函数适用于开挖直径为6.28 m的土压盾构机.
图 13
5.2. 盾构机掘进平衡条件
由式(1)可知,在盾构掘进过程中,掘进行为通过产生附加接触应力,改变盾构机-土体接触应力状态. 假设盾构掘进中处于静力平衡状态,且不考虑盾构姿态偏移对盾构机上其他力的影响,则盾构机在盾构推力增量与土体附加荷载作用下保持力和力矩的平衡,盾周土体附加荷载由盾壳外表面上的附加接触应力积分得到,则有以下结论.
x和y方向静力平衡:
纵向静力平衡:
盾尾截面中心力矩平衡:
式中:
假设
通过式(29)、(30)可以求得上、下分区盾构推力改变量,由水平偏角增量对应的水平偏转力矩和纵向推力增量平衡可得左、右分区盾构推力改变量.
求得洞周面积上的接触应力积分,即可得到盾构机各分区调姿荷载. 考虑到洞周应力为数值解,将内层洞周积分公式转化为求和公式,经整理可得,盾周土体附加荷载转化为沿纵向分布的机土相对位移和盾周周长的定积分为
式中:
如图14所示,盾构掘进产生的均匀径向位移仅与开挖半径和收敛半径有关,考虑盾构机楔形量,沿纵向分布函数为
图 14
式中:
式中:
盾构机轴线偏移轨迹可以通过盾构机信息平台监测记录,姿态角可以通过盾构偏移轨迹确定. 忽略端部小范围内的误差,基于该方法可以初步计算随盾构掘进轨迹变化的盾周土体附加荷载.
5.3. 算例分析
基于3章的算例,计算盾构机发生不同偏角时的调姿荷载和力矩. 在水平方向,均匀径向位移和竖向偏移位移产生左右对称分布的附加接触应力,对盾构外表面积的积分为零. 对于竖向,水平偏移位移不产生竖向附加应力,均匀径向位移由于上、下边界条件不对称,会产生竖向附加荷载,但竖向附加荷载数值较小(当盾尾径向位移为0.025 m时,考虑盾构楔形量,产生了16.3 kN的竖向附加荷载). 综上分析,水平附加荷载和偏转力矩主要由水平偏角改变量产生,竖向附加荷载和倾覆力矩主要由俯仰角改变量产生.
如图15所示为关于姿态角增量的水平和竖向调姿荷载曲线. 可以看出,水平和竖向调姿荷载曲线基本相同,调姿荷载随着姿态角增量的增加而线性增大. 当水平偏角和俯仰角增量均为3 mm/m时,水平调姿荷载为1 183.41 kN,竖向调姿荷载为1 185.02 kN(远大于16.33 kN),竖向调姿荷载偏大可能由于上、下边界条件不对称. 如图16所示为关于姿态角增量的水平偏转力矩
图 15
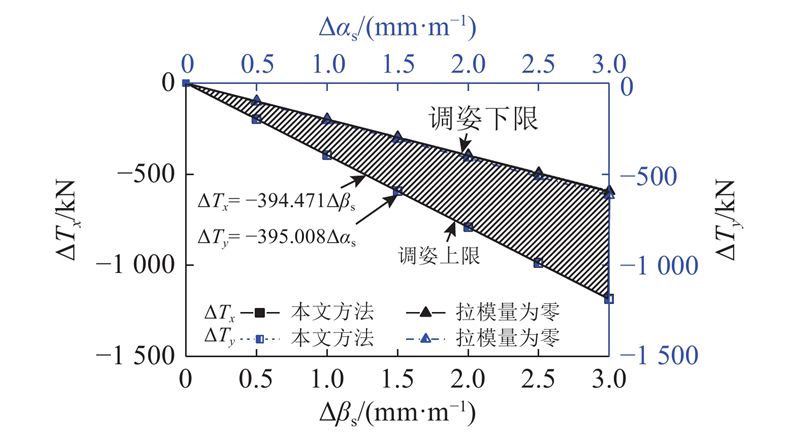
图 15 水平和竖向调姿荷载曲线
Fig.15 Horizontal and vertical posture adjustment load curves
图 16
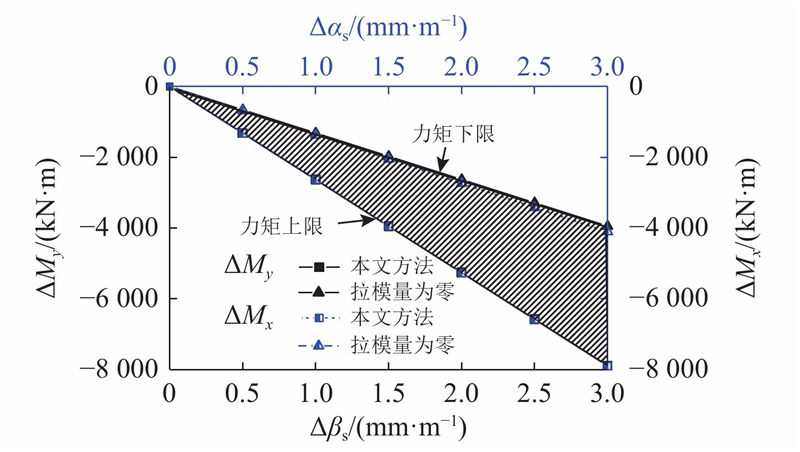
图 17
本文方法可以考虑盾构掘进行为对盾壳上所受荷载的影响,与现有的盾构荷载设计方法相比,更符合盾构的实际负载情况. 本文采用平面应变模型假定,未考虑沿盾构纵向土体连续变形产生的切应力作用,在后续工作中需要进一步研究,以满足盾构机三维受力特点和计算精度的要求.
6. 结 论
(1)针对盾构掘进行为对盾壳和土体接触面上接触应力的影响,将盾构和土体相互作用模型简化为弹性半空间孔洞问题,将盾构掘进行为简化为径向、竖直和水平方向的洞周位移模式. 采用复变函数理论,建立盾壳和土体附加接触应力计算方法,通过三维数值模拟对所提方法进行分析与验证. 结果表明,在盾构端头处有一定的偏差,在绝大盾构长度范围内,理论上与三维模拟结果较接近.
(2)采用本文方法对影响盾构和土体附加接触应力的相关因素进行敏感性分析,随着机土相对位移的增加,附加接触应力峰值逐渐增大,盾构下半环的应力峰值较上半环大. 当盾构掘进引起的洞周位移模式相同时,泊松比越小,土体弹性模量越大,极值点处的接触应力越大. 机土附加接触应力随着埋深的增加而基本保持不变.
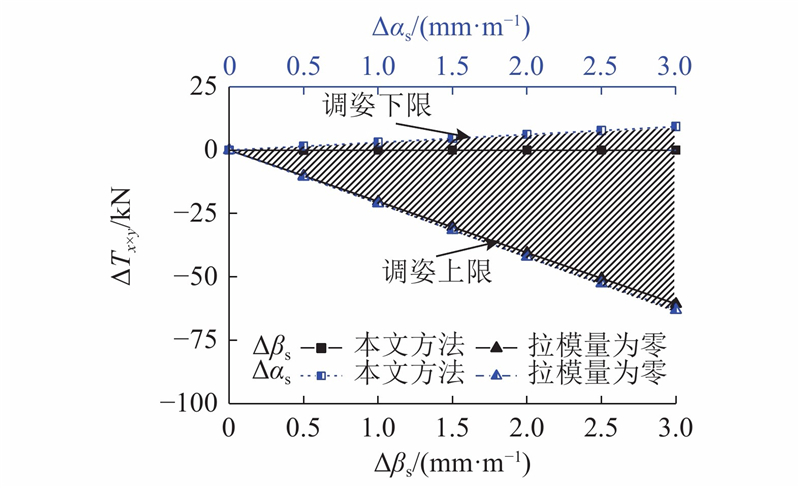
(3)经归一化处理,得到附加接触应力系数的分布函数. 考虑盾构掘进轨迹,建立沿盾构纵向分布的机土相对位移计算公式,得到沿盾构纵向分布的盾壳-土体附加接触应力;通过盾构外表面应力积分得到盾壳附加荷载,建立盾构机上力和力矩增量平衡方程. 通过算例分析,给出适用于直径为6.28 m的土压平衡盾构机的关于盾构水平偏角和俯仰角改变量的调姿荷载、水平偏转力矩和倾覆力矩曲线. 结果显示,姿态角改变量越大,水平、竖向调姿荷载和偏转力矩越大,纵向调姿荷载变化越小.
参考文献
Kinematic behaviour of a tunnel boring machine in soft soil: theory and observations
[J].DOI:10.1016/j.tust.2015.03.007 [本文引用: 1]
Correlation between the kinematics of a tunnel boring machine and the observed soil displacements
[J].DOI:10.1016/j.tust.2017.07.014 [本文引用: 1]
盾构智能化姿态控制器的设计
[J].
Design of intellectualized controller of shield machine
[J].
Theoretical model of shield behavior during excavation I: theory
[J].DOI:10.1061/(ASCE)1090-0241(2002)128:2(138) [本文引用: 2]
Simulation of shield tunneling behavior along a curved alignment in a multilayered ground
[J].DOI:10.1061/(ASCE)1090-0241(2007)133:6(684) [本文引用: 2]
盾构俯仰角变化对盾构-土相互作用影响研究
[J].
Influence of shield pitch angle variation on shield-soil interaction
[J].
A complex variable solution for a deforming circular tunnel in an elastic half plane
[J].DOI:10.1002/(SICI)1096-9853(199702)21:2<77::AID-NAG857>3.0.CO;2-M [本文引用: 3]
Elastic solution for tunneling-induced ground movements in clay
[J].DOI:10.1061/(ASCE)1532-3641(2004)4:4(310) [本文引用: 2]
Analytical solution for tunneling-induced ground movement in clays
[J].DOI:10.1016/j.tust.2004.08.009 [本文引用: 2]
复变函数分析盾构隧道施工引起的地基变形
[J].DOI:10.3321/j.issn:1000-4548.2007.03.002 [本文引用: 2]
A complex variable solution for different kinds of oval deformation around circular tunnel in an elastic half plane
[J].DOI:10.3321/j.issn:1000-4548.2007.03.002 [本文引用: 2]
盾构任意衬砌变形边界条件下复变函数弹性解
[J].DOI:10.3785/j.issn.1008-973X.2010.09.031 [本文引用: 1]
Elastic complex variables solution for general arbitrary ground deformation of tunnels in clays
[J].DOI:10.3785/j.issn.1008-973X.2010.09.031 [本文引用: 1]
浅埋含空洞地层圆形隧道开挖引起的位移复变函数弹性解
[J].
Elastic solution of soil displacement induced by shallow circular tunnel with a cavern in a stratum using function of complex variable method
[J].
Skin friction between various soils and construction materials
[J].DOI:10.1680/geot.1961.11.4.339 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}