

在智能假肢样机方面,冰岛Ossur公司的仿生磁控膝关节、美国YOBAND公司的3K180型假肢、德国Otto Bock公司的C-LEG假肢[9]在假肢穿戴者骑行的流畅性和稳定性方面均取得了一定的成果.
骑行相对于其他运动而言,运动方式有很大的不同. 当假肢穿戴者骑行时,双脚均与脚蹬持续接触,下肢运动频率相较于其他运动方式更快;相较于正常人而言,当假肢侧处于放松区时,若假肢不能与健肢侧协调运动,则会导致健肢脚蹬曲柄支撑假肢向上运动,极大地消耗假肢穿戴者骑行时的体力,且会影响截肢者骑行时的平衡性和安全性.
下肢假肢穿戴者骑行相位识别作为骑行控制的基础,识别准确率在假肢控制方面起到了至关重要的作用. 为了保证对截肢者相位识别的准确率,本文选取膝关节、踝关节加速度信号以及膝关节角度信号组成多维特征向量,作为假肢穿戴者骑行相位识别模型的输入,分别使用支持向量机(support vector machines,SVM)分类模型及BP神经网络分类模型对骑行相位进行识别. 通过对比发现SVM分类模型的识别效果更好,为了进一步提高识别准确率,将灰狼优化算法(grey wolf optimization,GWO)与SVM进行融合,并与粒子群优化算法(particle swarm optimization,PSO)[6]、遗传优化算法(genetic algorithm,GA)[13]优化后的SVM分类模型进行对比. 实验结果表明,灰狼优化算法的优化效果更优.
1. 骑行相位分析
下肢假肢穿戴者骑行运动的循环模式,与行走运动有明显的区别. 行走运动是支撑相和摆动相的交替循环过程. 在支撑相,假肢会与地面接触;在摆动相,假肢脚底会出现与地面不接触的腾空状态. 骑行运动是用力区和放松区的交替循环过程,假肢脚底与脚蹬间持续接触. 相较于行走而言,骑行的周期性更明显,运动频率更高. 假肢穿戴者的骑行相位识别对将来的假肢穿戴者骑行控制研究具有重要的作用.
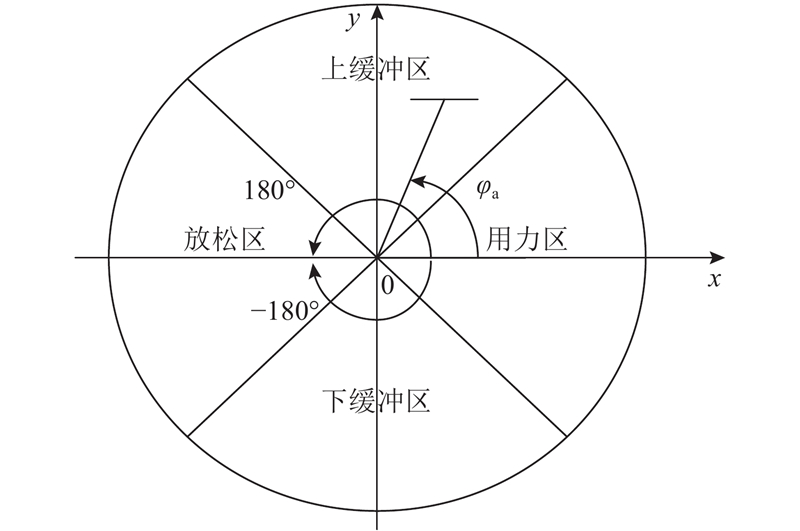
在对假肢穿戴者骑行相位的研究中,根据假肢穿戴者骑行周期中的用力以及能量效率情况,将骑行周期分为4个阶段[9],如图1所示. 以圆心为原点,过原点的水平面为x轴,其中原点右侧为正半轴,右侧为负半轴,垂直于x轴且过原点为y轴,其中上侧为正半轴,下侧为负半轴. 定义从x轴正半轴开始向y轴正半轴旋转,角度为正,当到达x负半轴时,角度达到最大值180°. 从x轴正半轴开始向y轴负半轴旋转,角度为负,当到达x轴负半轴时角度达到最小为−180°.φa为脚蹬曲柄与水平面所成角度,在用力区(−45°<φa <45°)的能量利用率最高. 在下缓冲区(−135°< φa <−45°)能量利用率不高,所以减少关节用力达到放松区(−180°< φa <−135°,135°< φa <180°). 在放松区,假肢膝关节不能同步收缩,所以导致脚蹬会支撑假肢向上运动至上缓冲区. 在上缓冲区(45°< φa <135°),逐渐用力,当到达用力区临界时,关节用力达到最大. 在实际应用中,由于 φa无法通过在假肢上安装传感器直接测得,需要在各个相位起始点静态条件下,采集脚蹬角度与各传感器信号的数据样本,利用样本分类方法来判断假肢穿戴者的骑行相位.
图 1
2. 数据处理及特征信号提取
2.1. 信号采集
图 2
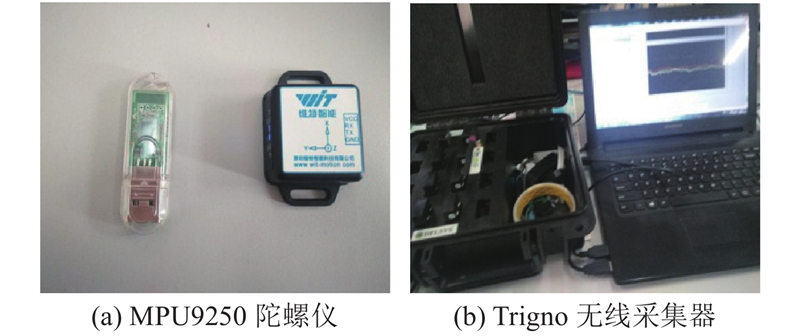
图 3
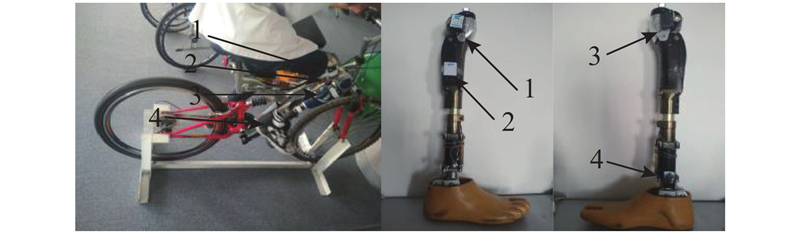
表 1 受试者情况
Tab.1
| 受试者编号 | 性别 | 年龄/岁 | 身高/cm |
| A1 | 男 | 42 | 173 |
| A2 | 男 | 27 | 175 |
| A3 | 女 | 25 | 162 |
2.2. 信号降噪处理
以W信号为例,离散时间序列为W=[w1,w2,··· ,wK],对信号W的长度i进行分段,按照下式构造新的特征矩阵:
式中:K为矩阵G的采样点数量,K=ji. 对矩阵G进行奇异值分解计算:
式中:U为左奇异矩阵,U为j×j的方阵,满足UUT=I;V为右奇异矩阵,V为i×i的方阵,满足VV T=I;Z为j×i的对角矩阵,对角元素为z1,z2,··· ,zq,q=min (j,i),z1≥z2≥··· ≥zq,其中z1,z2,··· ,zq为矩阵G的奇异值,矩阵G的奇异值可以反映原始信号及噪声信号的情况,如果奇异值中p个占据优势,即
其中前p个奇异值反映的是原始信号中的有用信号,其余较小的奇异值反映的是噪声信号. 将反映噪声的奇异值置0,即可完成对原始信号的降噪处理. 利用式(2)实现对原始信号的重建,将有用信号的奇异值对应项相加,取均值,可以完成对原始信号的降噪处理.
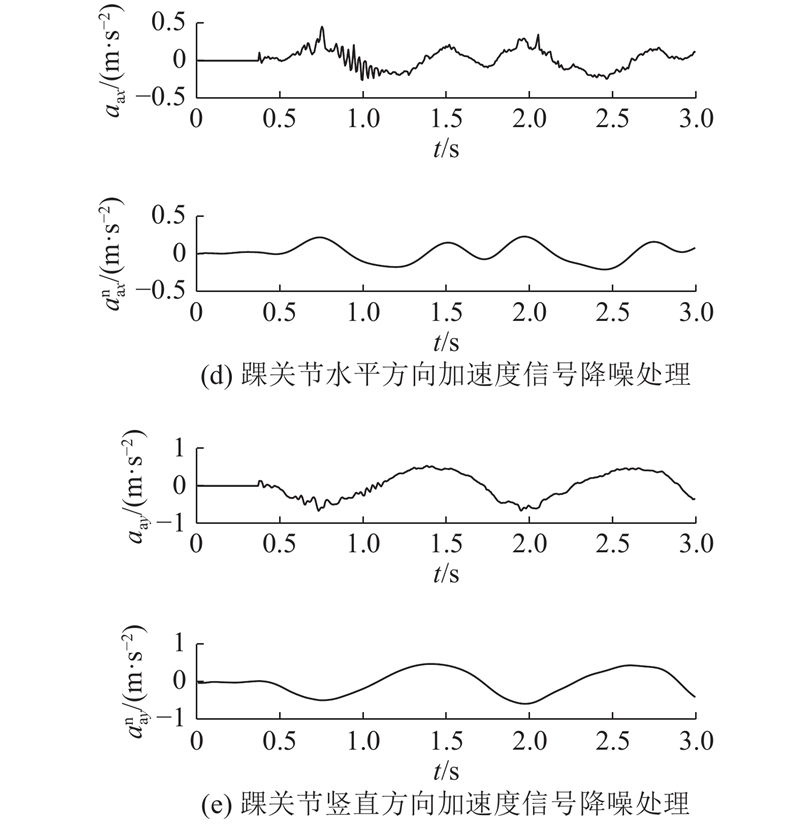
如图4所示为A2受试者在稳定骑行状态下,同一时段的膝关节水平、竖直方向原始信号以及踝关节水平、竖直方向的原始信号和经过奇异值降噪后的信号对比图. 图中,k为膝关节角度,akx、
图 4-1
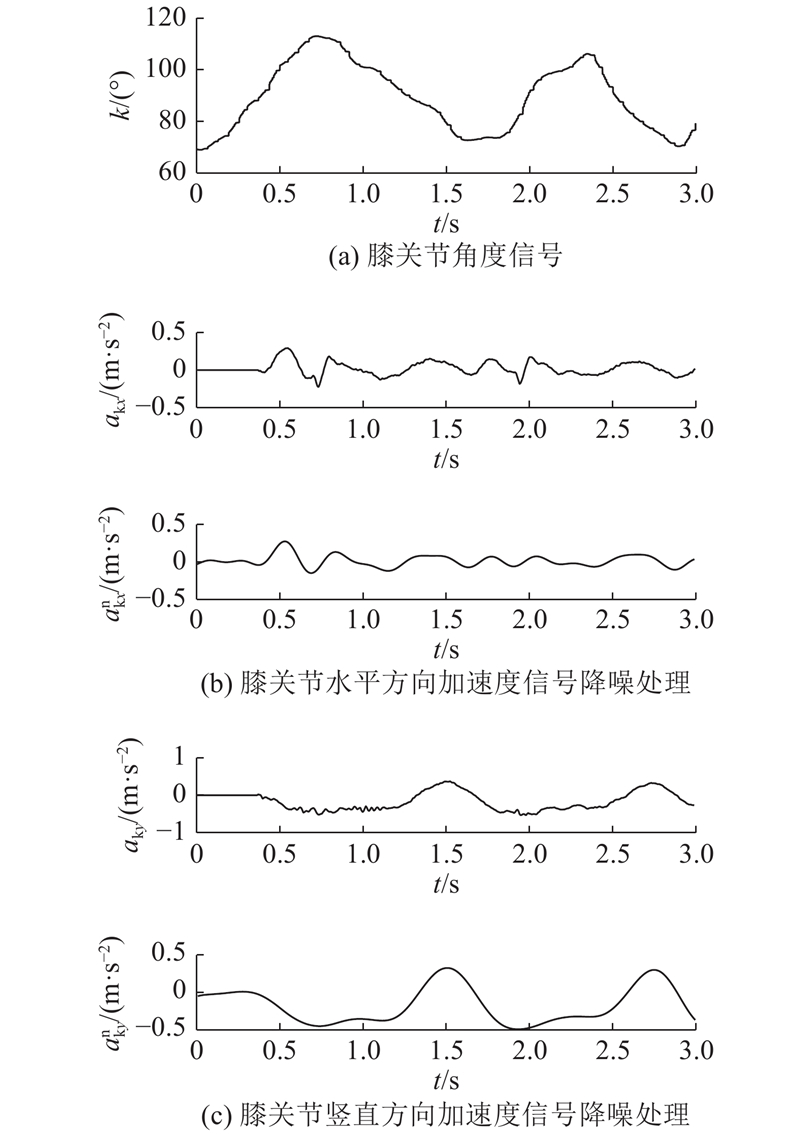
图 4
2.3. 信号特征提取
为了能够对假肢穿戴者骑行的4个相位进行有效的识别,需要确定膝关节在各个相位对应的角度. 设定如下:在用力区起点时,假肢膝关节角度为θp;在下缓冲区起点时,假肢膝关节角度为θl;在放松区起点时,假肢膝关节角度为θr,在上缓冲区起点时,假肢膝关节角度为θu. 3位受试者对应的角度如表2所示. 在实验中发现,在1个完整的骑行周期中,假肢膝关节会张开、收缩各1次,所以上述的膝关节角度会出现在2个区域,例如θp还可能出现在放松区,θr还可能出现在用力区.
表 2 受试者各相位对应角度
Tab.2
| 受试者 | θp /(°) | θl /(°) | θr /(°) | θu /(°) |
| A1 | 89.27 | 113.72 | 100.51 | 80.39 |
| A2 | 86.75 | 108.26 | 96.86 | 75.24 |
| A3 | 85.73 | 103.62 | 96.83 | 78.57 |
为了提高骑行相位识别的准确性,避免单一信号的不确定影响,从数据冗余的角度,以假肢穿戴者骑行时各个相位的膝关节特征点θp、θl、θr、θu,提取经过奇异值降噪后的膝关节、踝关节的水平和竖直方向加速度信号. 对膝关节角度信号进行归一化处理,对膝关节、踝关节水平方向的加速度分别提取平均值,对竖直方向的信号提取偏度,组成多维特征向量作为分类模型的输入. 其中平均值m(mean)表示加速度信号的平均强度,偏度s表示运动时的倾斜方向及倾斜角度:
式中:ki为第i个相位的膝关节角度采样值;kmin为膝关节角度中的最小值;kmax为膝关节角度中的最大值;M为采样点数;Xi为水平方向上的加速度采样值;Yi为竖直方向上的加速度采样值. 将4个相位的信号特征点组成特征向量
3. 骑行相位识别方法
骑行过程中的振动颠簸,即使经过滤波降噪,单个传感器信号也无法保证相位识别的准确度,因此需要应用SVM、BP神经网络等方法对多路传感器信号组成的多维向量进行分类,实现4个骑行相位的准确识别.
3.1. 支持向量机
式中:T(xi,x)为核函数,w、b分别为最优的权值向量和阈值.
SVM分类算法根据决策函数在高维空间中构造最优分类面,实现对二维数据的分类. 由于加速度信号及角度信号属于线性不可分的情况,为了实现对骑行4个相位的划分,需要把信号映射到高维空间中,构造多个决策分类函数,在高维空间中解决线性不可分的问题.
以多维特征向量作为SVM分类模型的输入,实现x从低维空间Rn到高维空间G的转换,即x→λ(x)=[λ1(x),λ2(x),···,λn(x)]T. 将输入向量变为多维特征向量λ(x),可得最优分类函数为
以
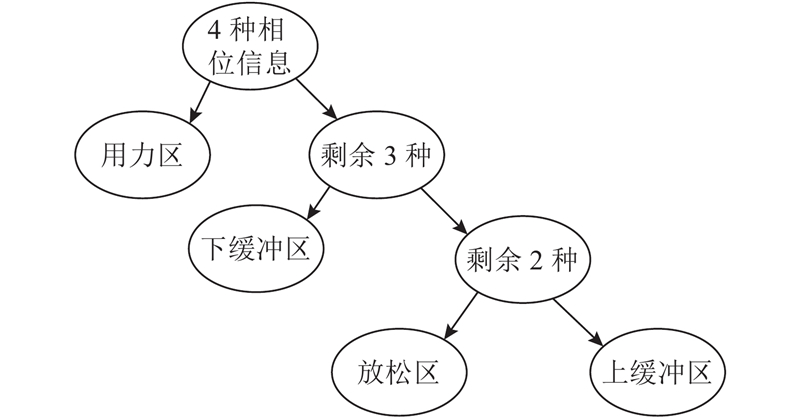
3.2. 二分类法
利用从假肢穿戴者骑行信号特征中提取的特征信号构成多维特征向量
图 5
3.3. SVM核函数
SVM分类模型通过核函数将低维空间中的数据映射到高维空间中,在高维空间中建立最优决策面,实现对数据的分类. 在假肢穿戴者骑行相位识别过程中,SVM核函数的选择对识别准确率有重要的影响. SVM常用核函数主要有多项式核函数(polynomial)、Sigmoid核函数(sigmoid)、线性核函数(linear)、径向基核函数(RBF)4种. 核函数内的参数会对结果产生重要的影响,其中核函数宽度γ会影响支持向量机模型的复杂度和分类精度;惩罚因子C可以调节模型的复杂度,有效地提高模型的泛化性能.
为了确定最优的核函数,选取50组骑行数据样本,从其中4个不同的运行阶段共提取200组数据,进行归一化处理. 选取100组数据,每个阶段25组作为分类模型的训练集. 剩下的100组数据作为模型的测试集. 不同核函数的试验结果如表3所示.
表 3 不同核函数的测试结果
Tab.3
| 核函数 | C=2,γ=1 | C=1,γ=1 | C=2,γ=0.5 | C=3,γ=2 |
| polynomial | 75% | 73% | 48% | 83% |
| sigmoid | 31% | 28% | 82% | 3% |
| linear | 77% | 83% | 80% | 85% |
| RBF | 79% | 85% | 85% | 83% |
经过对比可以看出,高斯核函数(RBF)在识别过程中比较稳定且具有较高的准确率,所以选择RBF核函数作为SVM分类模型中的核函数.
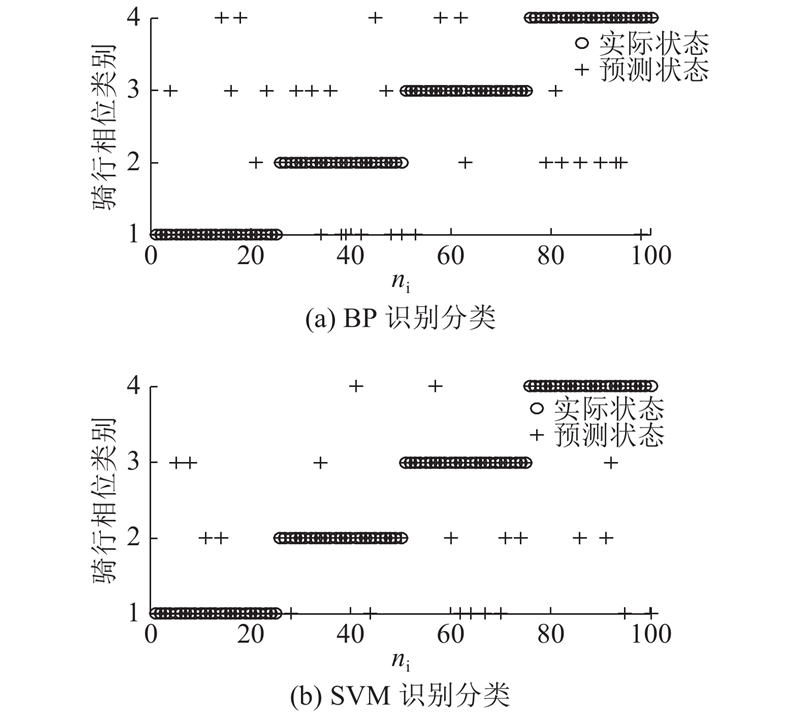
3.4. 与BP神经网络对比
在对骑行各个相位的识别中,采集4个相位的信号各50组,共200组. 其中100组作为训练集,训练分类模型,剩余100组作为测试集. 在BP神经网络分类模型中,每组信号为5维,待识别的信号有4类,所以BP神经网络的节点数为5--6--4,即输入层有5个节点,隐含层有6个节点,输出层有4个节点. 如图6所示分别为 BP方法、SVM方法的相位识别结果图. 图中,ni为测试样本数量,1为用力区,2为下缓冲区,3为放松区,4为上缓冲区,空心圆表示实际相位,+表示预测相位,若两者重合则表示预测准确,若不重合则表示预测错误. 在100组预测数据中,BP分类模型的总体识别率为72%,SVM分类模型的总体识别率为79%. 通过对比可知,SVM分类模型相对于BP神经网络分类模型的准确率更高.
图 6
3.5. 灰狼优化算法
虽然SVM分类模型相较于BP神经网络分类模型的识别率较高,但是在假肢穿戴者进行骑行时,由于骑行周期短,频率快,需要识别分类模型拥有较高的识别率. 利用灰狼优化算法(GWO)对支持向量机分类模型进行优化. 灰狼优化算法是Mirjalili等提出的模拟灰狼群体捕食行动的新型智能优化算法[29-32]. 灰狼算法具有较强的收敛性、全局优化能力,提高分类效率,且容易实现,在参数优化,图像分类等领域应用十分广泛. 灰狼优化算法的基本思想是模拟狼群捕食实物活动. 灰狼算法的基本原理如下. 在搜索空间中随机创建1组灰狼,通过计算适应度构建等级层次,将适应能力最强的设置为α狼,将适应度稍弱于α狼的设置为β狼,剩下的适应度最弱的设置为δ狼. GWO优化算法的优化过程主要通过每代种群中的α狼、β狼、δ狼,对猎物进行定位计算,通过自身优化缩短与猎物之间的距离,捕杀猎物. GWO算法主要包括以下3个定义.
定义1 在进行灰狼算法优化之前,需要确定猎物的位置,计算出猎物距离灰狼的距离:
式中:S(t)、Sp(t)分别为第t代时灰狼以及猎物的位置向量;C为系数,
其中r1为0~1.0的随机数.
定义2 确定第t+1代灰狼的位置:
式中:μ、r2分别为收敛向量和a的随机数,其中|a|会随着迭代次数的增多由2减小至0;S(t+1)为经过t+1次迭代后灰狼的位置向量.
定义3 确定猎物的位置,在每次迭代过程中α狼距离猎物的距离均是最近的,可以通过S(t+1)代中的α狼来计算猎物的方向,从而求出α狼、β狼以及δ狼和猎物之间的距离:
根据下式确定寻优方向:
式中:k=α,β,γ;i=1,2,3;Sp(t+1)为第t+1迭代时猎物的位置向量.
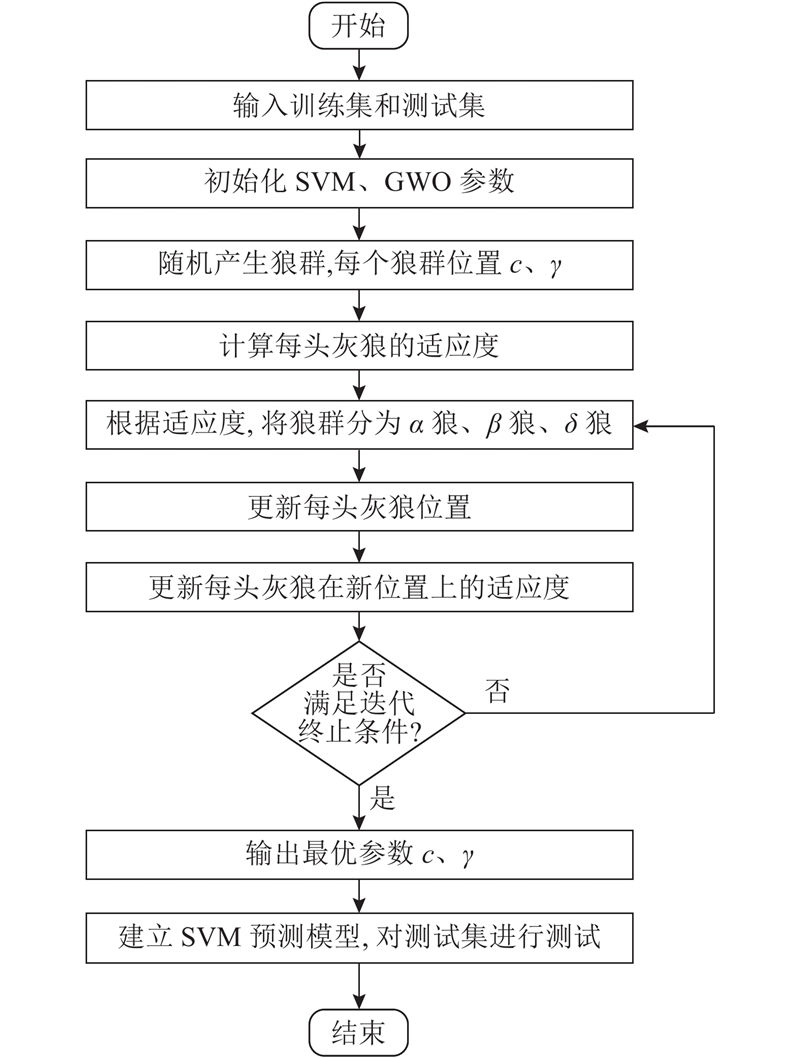
在SVM分类模型中,C及γ影响模型的复杂度,提高泛化性能,对分类结果有着重要的影响. 为了提高分类准确率,利用灰狼算法(GWO)用于优化和驯服参数C和γ. 利用SVM分类模型,预测假肢穿戴者的骑行相位. 灰狼优化支持向量机分类模型的流程如图7所示.
图 7
4. 实验结果
通过对比SVM分类模型和BP神经网络分类模型对于假肢穿戴者骑行相位识别的准确率,确定使用识别准确率更高的SVM分类模型. 为了进一步提高分类识别的准确率,使用灰狼优化(GWO)算法对SVM分类模型进行核参数优化. 为了验证将GWO与SVM分类模型相融合算法的有效性及可行性,将粒子群优化算法(PSO)、遗传算法(GA)优化后的SVM分类模型进行对比.
优化模型对比试验所采用的假肢穿戴者骑行数据与之前的相同,共200组. 其中100组作为训练集,训练分类模型;剩余100组作为测试集,检验模型识别的准确率. SVM的核函数均采用RBF核函数. GWO优化参数设置为:狼群数量为20,迭代次数为50次. PSO优化参数设置为:粒子群数为20,进化代数为50,c1、c2分别设置为1.5和1.7. GA优化参数设置为:种群数量为20,进化代数为50,交叉概率为0.9,变异概率为0.01.
如图8所示为GA-SVM分类模型、PSO-SVM分类模型及GWO-SVM分类模型对骑行相位识别的结果图. 图中,1为用力区,2为下缓冲区,3为放松区,4为上缓冲区,空心圆表示实际相位,+表示预测相位,若两者重合则表示预测准确,若不重合则表示预测错误. 对比实验结果中,GA-SVM分类模型在100组测试数据中共识别出87组,总体识别率为87%. PSO-SVM分类模型在100组测试数据中共识别出90组,总体识别率为90%. 经过GWO优化后的SVM分类模型在100组骑行测试数据中共识别出94组,总体识别率为94%,优化后的核函数参数值如表4所示. 表中,np为种群数量,PC为交叉概率,Pm为变异概率,npar为粒子群数,nw为狼群数量,A为准确率. 如表5所示为所有分类模型对100组假肢穿戴者骑行相位的具体识别结果. 表中,nr为识别样本数量,pr为识别率. 通过适应度来进一步对比3种优化算法对SVM分类模型的优化程度. 如图9所示为3种优化算法的适应度收敛曲线. 图中,Fit为适应度,Iit为迭代次数.
图 8
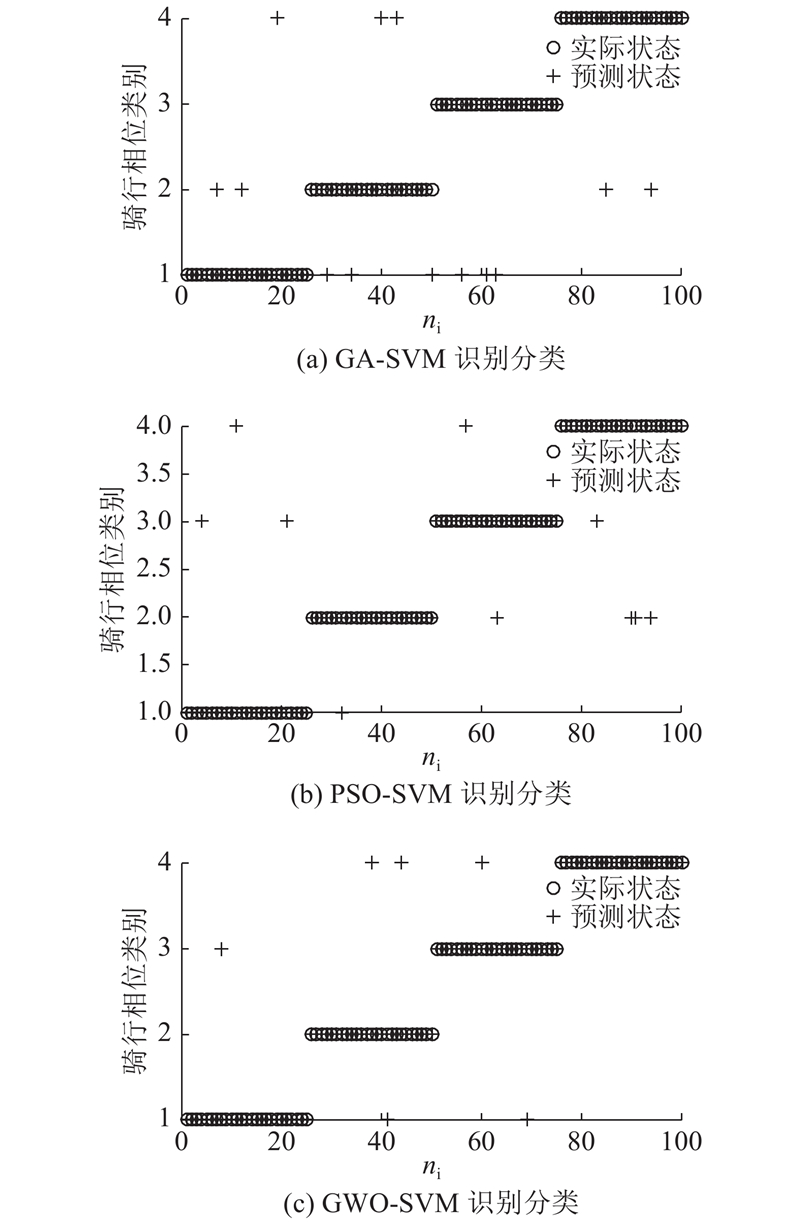
表 4 优化SVM的识别结果
Tab.4
| 优化方法 | 参数设置 | 寻优结果 | A /% |
| GA-SVM | np = 20, PC = 0.9, Pm = 0.01 | C = 44.602 7 γ = 25.110 6 | 87 |
| PSO-SVM | npar = 20, c1 = 1.5, c2 = 1.7 | C = 53.835 4 γ = 22.018 6 | 90 |
| GWO-SVM | nw = 20 | C = 20.246 2 γ = 35.184 2 | 94 |
表 5 各分类模型的识别结果
Tab.5
| 算法 | nr | pr /% | ||||
| 用力区 | 下缓冲区 | 放松区 | 上缓冲区 | 总和 | ||
| BP | 19 | 15 | 21 | 17 | 72 | 72 |
| SVM | 21 | 22 | 17 | 19 | 79 | 79 |
| GA-SVM | 22 | 20 | 22 | 23 | 87 | 87 |
| PSO-SVM | 22 | 24 | 23 | 21 | 90 | 90 |
| GWO-SVM | 24 | 22 | 23 | 25 | 94 | 94 |
图 9
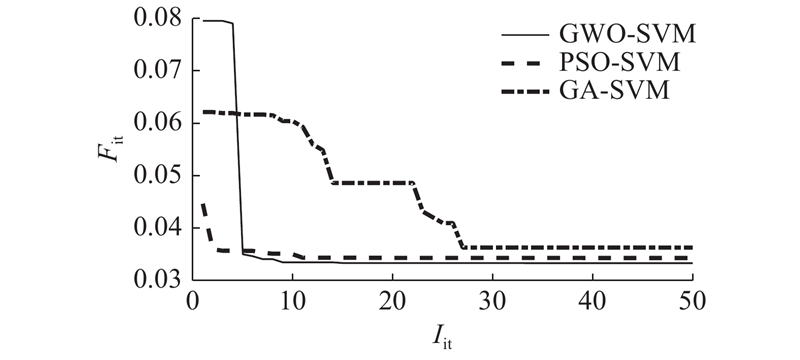
在适应度曲线方面,从图9可以看出,GWO的适应度最小,说明优化效果最好. 在收敛效果方面,GA优化算法在24代左右得到最优结果,较PSO优化算法及GWO优化算法而言,收敛速度较缓慢. 对比PSO优化算法及GWO优化算法可以看出,虽然PSO在迭代前期收敛速度较快,但是不能迅速地达到最低适应度,需要1个较长的过程,在第13次迭代时才能够完全收敛;GWO优化算法能够较快地完成收敛,在第10次迭代时能够达到最佳的适应度. 综上所述,GWO-SVM分类模型无论是在识别准确度、适应度还是在收敛速度上均优于其他2种分类模型.
从表5可以看出, GWO-SVM分类模型对于假肢穿戴者骑行各个相位识别的准确率大于其他分类模型. 骑行相较于行走运动而言,骑行运动的频率更快,所以对于骑行相位识别的准确率越高,假肢穿戴者骑行时的流畅性越高. 在基本的分类模型中,选择传统的SVM分类模型和BP神经网络分类模型,但BP神经网络需要基于经验最小化原则,因此可能引起连接权重陷入局部最小化,影响系统的输出误差,导致BP神经网络分类模型处于学习不足或过度学习的状态. SVM分类模型是以结构风险最小化为基础,所以在稳定性和泛化性能上相较于BP神经网络更优. 利用GWO算法对SVM核参数进行寻优处理,使得GWO-SVM分类模型在假肢穿戴者骑行相位识别中无论是在识别的准确率上还是在收敛的速度上都有很大的提升.
对于所采集提取的假肢穿戴者骑行各相位数据,通过GWO优化后的SVM分类模型对于识别骑行相位的方法是可行的,且识别精度高. 利用该分类模型得到的识别结果对于之后的假肢穿戴者骑行时的膝关节控制提供了基础作用.
5. 结 语
通过在假肢膝关节上配置陀螺仪,在膝关节、踝关节上配置加速度传感器,采集假肢穿戴者的运动特征. 应用GWO-SVM优化模型的方法,将骑行相位识别的准确率提高到了94%,明显优于BP神经网络、PSO-SVM、GA-SVM分类模型等方法. 骑行相位的准确识别是实现假肢膝关节高效率、准确控制的基础. 对于被动型假肢,可以根据不同的骑行相位阶段,调节气缸阻尼,以配合残肢髋关节的施力、过渡调节和放松回收;对于主动型假肢,可以在不同骑行相位控制关节驱动电机的正反转和加减速,缓解假肢穿戴者的疲劳程度,提升关节驱动电机的能量效率.
参考文献
Estimating the prevalence of limb loss in the United States: 2005 to 2050
[J].DOI:10.1016/j.apmr.2007.11.005 [本文引用: 1]
Mobility outcome following unilateral lower limb amputation
[J].DOI:10.1080/03093640308726681 [本文引用: 1]
User-independent intent recognition for lower-limb prostheses using depth sensing
[J].
膝上型假肢的运动意图识别与控制
[J].
Motion intention recognition and control of above knee prosthesis
[J].
Adaptive slope walking with a robotic transtibial prosthesis based on volitional EMG control
[J].DOI:10.1109/TMECH.2014.2365877 [本文引用: 1]
下肢假肢穿戴者跑动步态识别方法
[J].DOI:10.3785/j.issn.1008-973X.2018.10.018 [本文引用: 3]
Approach of running gait recognition for lower limb amputees
[J].DOI:10.3785/j.issn.1008-973X.2018.10.018 [本文引用: 3]
下肢假肢斜坡路况运动控制策略分析
[J].
Analysis of slope motion control strategy of lower limb prostheses
[J].
A robotic lower limb prosthesis for efficient bicycling
[J].DOI:10.1109/TRO.2016.2636844 [本文引用: 3]
基于隐马尔可夫模型的动力型下肢假肢步态预识别
[J].
Gait pre-recognition of dynamic lower limb prosthesis based on hidden Markov model
[J].
基于惯导信息的人体动作和路况识别
[J].
Human action and road condition recognition based on the inertial information
[J].
Feature selection based on hybridization of genetic algorithm and particle swarm optimization
[J].DOI:10.1109/LGRS.2014.2337320 [本文引用: 1]
康复辅助机器人及其物理人机交互方法
[J].
Physical interaction methods for rehabilitation and assistive robots
[J].
面向人机融合的智能动力下肢假肢研究现状与挑战
[J].
Recent progress and challenges of robotic lower-limb prostheses for human robot integration
[J].
The effects of electrode size and orientation on the sensitivity of myoelectric pattern recognition systems to electrode shift
[J].DOI:10.1109/TBME.2011.2159216 [本文引用: 1]
A foot-wearable interface for locomotion mode recognition based on discrete contact force distribution
[J].
Gait partitioning methods: a systematic review
[J].DOI:10.3390/s16010066 [本文引用: 1]
Capacitively-coupled electrocardiogram measuring system and noise reduction by singular spectrum analysis
[J].
A noise reduction technique based on nonlinear kernel function for heart sound analysis
[J].
基于奇异值和奇异向量的振动信号降噪方法
[J].
Noise reduction method of vibration signal based on singular value and singular vector
[J].
Natural sampling SVM-based common-mode voltage reduction in medium-voltage current source rectifier
[J].DOI:10.1109/TPEL.2016.2632442 [本文引用: 1]
Linear regression-based efficient SVM learning for large-scale classification
[J].
Online state-based structured SVM combined with incremental PCA for robust visual tracking
[J].
压电作动器的支持向量机迟滞模型
[J].
Support vector machine-based hysteresis model of piezoelectric actuator
[J].
利用融合数据分布特征的模糊双支持向量机对恒星光谱分类
[J].
Stellar spectra classification by support vector machine with spectral distribution properties
[J].
Combining convolutional neural network with recursive neural network for blood cell image classification
[J].
基于BP神经网络的仿生眼定位追踪算法
[J].
Locating and tracking algorithm of biomimetic eye based on backpropagation neural network
[J].
基于ADEGWO-SVM的机载燃油泵寿命预测研究
[J].
Research on remaining useful life prediction of fuel pump based on adaptive differential evaluation grey wolf optimizer-support vector machine
[J].
基于ACMPE、ISSL-Isomap和GWO-SVM的行星齿轮箱故障诊断
[J].
Planetary gearbox fault diagnosis based on ACMPE, ISSL-Isomap and GWO-SVM
[J].
基于灰狼支持向量机的非等时距滑坡位移预测
[J].DOI:10.3785/j.issn.1008-973X.2018.10.020
Prediction of non-equidistant landslide displacement time series based on grey wolf support vector machine
[J].DOI:10.3785/j.issn.1008-973X.2018.10.020

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}