

北斗导航系统提供多个频点的导航信号. 2018年2月,北斗官方公开了B3信号的空间信号接口控制文件,为全球用户提供公开服务. B3频点测距码的码速率达到10.23 Mcps,为GPS C/A码的10倍,BDS B1频点的5倍. 理论上更高的码速率具有更优的抗噪声性能,从而能获得更高的伪距观测精度,有利于提升低轨卫星的定轨精度. 基于BDS进行低轨卫星定轨目前已有研究,Li等[3-8]对搭载GPS/BDS双模接收机的风云三号卫星定轨进行研究,在接收机最多只能同时跟踪6颗北斗导航卫星的条件下,可以实现事后高精度定轨,在实时定轨方面,佘丽丽[9]使用风云三号C星数据,在亚太区域内使用BDS可以达到小于15 m的定轨精度;熊超等[10]采用模拟器仿真数据,仅使用BDS进行实时定轨仿真测试,得到的三轴误差在5 m以内. 已有研究尚未将B3频点信号用于低轨卫星定轨,定轨精度偏低,不足以满足高精度实时定轨的需求.
本文基于自主研制的搭载于浙江大学皮星三号(ZDPS-3)任务的星载GPS/BDS接收机,对基于北斗(特别是B3频点)的实时定轨性能进行评估,以期充分发挥B3频点伪码观测精度高的优势,提升低轨卫星实时定轨性能.
1. 定轨理论模型
1.1. 基本观测模型
伪距与载波相位是GNSS导航定位中最主要的观测量. 综合考虑各项误差后,可以得到伪距观测量ρ与载波相位观测量Ф的观测方程:
式中:ρrs为接收机与导航星之间的几何距离,c为光速,δ(tr)为接收机钟差,δ(ts)为导航卫星钟差,Iρ、IФ分别为伪距、载波相位的电离层延迟,Фpco、ρpco分别为天线相位中心偏差值(phase center offset,PCO)的误差,B为载波相位模糊度,ερ、εФ分别为伪距与载波相位的测量噪声. 对于低轨卫星,其运行轨道位于对流层之上,因此可以忽略低轨卫星受到的对流层延迟影响.
1.2. 伪距观测误差
式中:Bfe为射频前端带宽,TC为伪码码宽,D为前后相关器间距,BL为环路噪声带宽,C/N0为载噪比,Tcoh为相干积分时间.
在相同参数条件下,B3码由热噪声引起的测量误差均方差理论上比B1小5倍.例如在本文所用的接收机中,B3频点的射频前端带宽Bfe为20 MHz,B1频点为4 MHz,前后相关器间距D为1个码片,在环路噪声带宽BL、载噪比C/N0与相干积分时间Tcoh相同的条件下,B1、B3频点由热噪声导致的以码片相位为度量的跟踪误差相同. 而B3的码片周期是B1的1/5,故换算为距离单位后B3频点由热噪声导致的跟踪误差小于B1. 需要指出的是,除了热噪声,决定DLL跟踪精度的误差源还应包括动态应力,两者共同影响最终的环路跟踪精度.
1.3. 消电离层组合观测模型
1.3.1. 双频伪距组合
伪距在通过电离层时的延迟量与其载波频率的平方成反比,利用这一特性,可构建组合观测值以消除电离层的影响:
式中:ρIF为伪距组合观测量,ρ1、ρ2分别为载波频率f1、f2上的伪距观测量,组合后的伪距观测噪声标准差为
式中:γ=(f1/ f2)2,σ1、σ2分别为各自频点上的伪距观测噪声标准差. 可见,伪距组合的方式虽然能消除电离层延迟,却不可避免地放大了观测噪声,组合后的定轨精度甚至有可能低于单频的定轨精度.
1.3.2. GRAPHIC组合
根据同一导航信号频率上伪距和载波相位观测值的电离层延迟一阶项大小相等、符号相反的特性,可通过GRAPHIC组合的方式消除电离层影响[16],其组合方式为伪距观测量ρ与载波相位观测量Ф的数学平均,观测方程为
式中:εG为GRAPHIC组合后的测量噪声,
GRAPHIC组合测量噪声的标准差如下式:
1.4. 实时定轨算法
实时定轨常以序贯或者递推方法进行数据处理和参数估计,递推方法常采用EKF滤波算法. 基于星载BDS的低轨卫星定轨模型和观测模型,与GPS没有实质差异,区别在于观测模型中的时间系统、坐标系统和观测量精度. EKF的状态量包括卫星位置rsf、速度vsf和接收机钟差δ(tr). 对于单频定轨,EKF状态量还包括GRAPHIC组合的模糊度BG. EKF算法流程包括时间更新和测量更新,其时间更新方程为
式中:下标i或i−1为相应的观测历元;ti为观测历元i的时间;
式中:i为相应的观测历元;Ki为卡尔曼增益矩阵;zi为观测量;h为观测量关于EKF状态量的函数;Hi为h的雅克比矩阵;Wi为观测噪声的协方差矩阵;Yi+为EKF状态量的后验估计,即i历元位置、速度、接收机钟差和模糊度的值;I为单位矩阵;Pi+为EKF状态量的后验协方差矩阵. 对于单频数据,zi为GRAPHIC组合,即
2. 原始观测数据实测及精度评估
图 1

图 1 搭载于ZDPS-3的星载GNSS接收机样机实物图及原理框图
Fig.1 Photo and block diagram of GNSS receiver prototype for ZDPS-3
表 1 ZDPS-3接收机支持的频点
Tab.1
| 信号 | f/MHz | fc/ Mcps | 信号 | f/MHz | fc/ Mcps | |
| B1I | 1561.098 | 2.046 | L1 C/A | 1575.42 | 1.023 | |
| B3I | 1268.52 | 10.23 | L2C | 1227.60 | 1.023 |
零基线法是工程上常用的评估接收机原始观测数据性能的方法. 实验方法是通过特制的L波段信号分路器,将接收机天线收到的导航信号分成完全相等的两路,馈送给2台接收机. 理论上两路信号的对流层、电离层等主要测量误差来源相同,通过将观测到的伪距、载波相位数据在接收机之间和导航卫星之间进行两级差分,得到双差观测值,消除主要误差来源,因此双差观测值的期望值为0. 测量噪声为原始观测噪声的2倍,进而对接收机的原始观测数据质量作出评估.
为保证信号质量,实验地点选在楼顶空旷地带,时间为2018年7月1日22点至次日5点,接收机采用上文所述ZDPS-3 GPS/BDS双模接收机. 统计载噪比高于42 dBHz的卫星数据,以仰角最高的卫星为参考卫星,计算其他卫星相对于参考卫星的双差观测值. 1 h内BDS及GPS的外场实测伪距双差数据如图2、3所示,ρd为伪距的双差观测值. 统计观测时段所有卫星数据,B1伪距双差噪声标准差为0.43 m,B3伪距双差噪声标准差为0.17 m,而L1、L2分别为0.60与0.62 m. 如前所述,码速率的提高能够降低热噪声的影响,提升码环跟踪精度. 本文重点是利用B3伪码速率高的优势验证提升定轨精度的可能性,尚未对B3频点对应的环路参数进行优化设计. 根据实测结果,B3实际的伪距观测精度达到B1频点的2.53倍,且显著优于L1、L2频点.
图 2
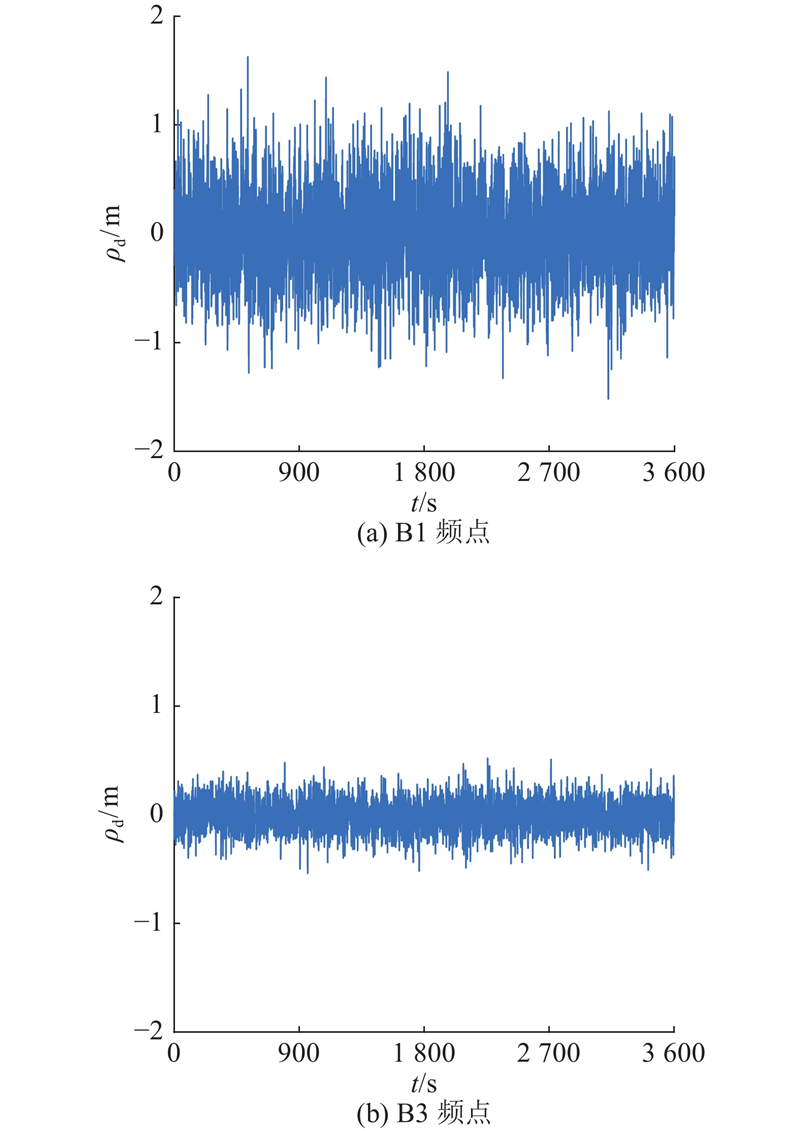
图 3

统计载波相位观测数据,B1和B3载波相位双差值的标准差分别为3.00 mm和3.60 mm,B3频点的载波相位精度略差于B1,这是由于B3载波波长大于B1频点,从而造成绝对精度的差异;如果换算成载波周数,则两者精度较为接近. 同理,L1频点外场实测载波相位双差值标准差为2.80 mm,略优于L2频点的3.90 mm.
3. 半物理仿真验证
由于目前暂时没有搭载北斗B3频点接收机的在轨卫星数据,本文通过半物理仿真实验进行验证. BDS测试使用率先支持B3频点的卫导NSS8000模拟器,半物理仿真平台如图4所示. 如图5所示为仿真实验的流程图. 本文的BDS测试数据采用2018年2月6日的仿真观测数据,低轨卫星的轨道根数设置值如表2所示,其中,a 为轨道半长轴,e 为偏心率,i 为轨道倾角,Ω 为升交点经度,ω 为近日点幅角,M 为平近点角. 由于模拟器尚未支持北斗三号系统,基于星座卫星数为14颗的北斗二号系统进行仿真测试. 由于北斗二号主要覆盖亚太地区,当低轨卫星运行到覆盖区域外时,仅能观测到少数卫星而不足以定位,因此可稳定定轨时长占轨道周期的1/3. 为此,本文主要评估可定轨时段的性能. 为对照评估本文所用接收机上的GPS定轨性能,使用英国思博伦GSS9000模拟器在相同条件下对GPS定轨进行仿真,GPS导航星座的卫星数为32颗,仿真时长为低轨卫星的一个轨道周期(5 400 s).
表 2 低轨卫星轨道根数
Tab.2
| 参数 | 设置值 | 参数 | 设置值 | |
| | 6 907 395.5 m | | 115.5611° | |
| | 0.001163 | | 128.1038° | |
| | 97.4304° | | 76.7532° |
图 4
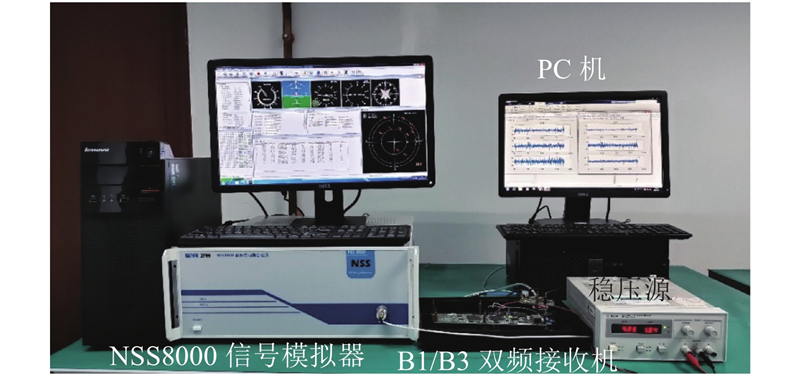
图 5

图 5 星载GPS/BDS定轨仿真实验流程图
Fig.5 Flow chart for simulation of GPS/BDS orbit determination
3.1. 双频伪距组合
表 3 位置误差均方差统计表
Tab.3
| 双频伪距组合 | RMS/m | |||
| X轴 | Y轴 | Z轴 | 三轴 | |
| BDS | 1.88 | 10.04 | 3.88 | 10.92 |
| GPS | 3.49 | 7.45 | 3.79 | 9.06 |
图 6

图 6 双频伪距组合实时定轨结果
Fig.6 Real-time orbit determination results of dual frequency pseudorange combination
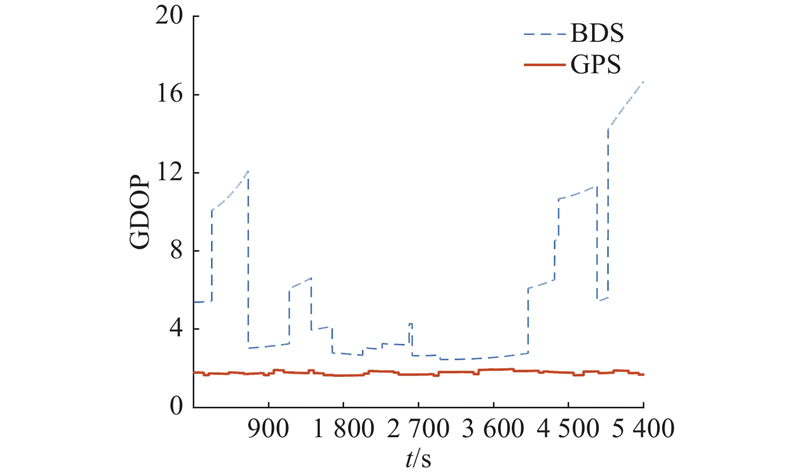
由以上结果可见,GPS的总体定轨精度略优于BDS,这是由于GPS星座为完全运行状态,可用星数更多,仿真时段的平均可用星数达到9颗. 而BDS星座为部分运行状态(总共仅14颗星),平均可用星数仅为6颗. 统计仿真时段的几何精度因子(geometric dilution precision, GDOP)如图7所示,GPS的平均GDOP为1.78;而BDS的GDOP值波动较大,在亚太区域内的平均GDOP值为3.60,亚太区域外由于星数太少,几何分布急剧变差甚至导致不能定位. 如前所述,双频伪距组合会放大伪距噪声,定轨精度甚至有可能劣于单频伪距定轨精度. 表3为定轨位置误差均方差(root mean square, RMS)统计结果。其中,RMSX、RMSY、RMSZ、和RMSS分别为ECEF坐标系下X轴、Y轴、Z轴以及三轴方向的位置误差均方差. 如表3所示,无论是GPS还是BDS,采用双频伪距方式定轨的三轴位置精度接近10 m量级,不足以满足高精度实时定轨的需求.
图 7
3.2. GRAPHIC组合
表 4 BDS位置误差均方差统计表
Tab.4
| 双频伪距组合 | RMS/m | |||
| X轴 | Y轴 | Z轴 | 三轴 | |
| B1 | 0.72 | 3.77 | 1.45 | 4.10 |
| B3 | 0.83 | 2.47 | 0.99 | 2.79 |
表 5 GPS位置误差均方差统计表
Tab.5
| 双频伪距组合 | RMS/m | |||
| X轴 | Y轴 | Z轴 | 三轴 | |
| L1 | 1.21 | 1.33 | 1.72 | 2.49 |
| L2 | 1.34 | 1.47 | 1.73 | 2.64 |
图 8

图 8 BDS GRAPHIC组合实时定轨结果
Fig.8 Real-time orbit determination results of GRAPHIC for BDS
图 9

图 9 GPS GRAPHIC组合实时定轨结果
Fig.9 Real-time orbit determination results of GRAPHIC for GPS
由以上结果可见,B1频点的定轨位置精度达到4.10 m,较双频伪距组合有显著提升;B3频点由于具有码速率优势,精度提升至2.79 m. 如前所述,GPS由于目前在轨星数更多,可以达到更优的GDOP值,故L1、L2仿真结果稍优. 待北斗三代建设完成,根据前文观测数据实测评估对比结果,预期可以获得优于GPS的定轨性能. 总体而言,采用GRAPHIC组合可以获得明显优于双频伪码组合的定轨精度,而B3频点由于测距码抗噪声性能优势显著,可以在GRAPHIC组合下获得相对较好的定轨精度.
伪距测量噪声是GRAPHIC组合观测精度的主要误差源. 根据外场实测及在轨场景仿真实验结果,B3伪距噪声低的优势可以明显地体现在定轨结果中,在实际低轨卫星应用中,采用B3频点GRAPHIC组合进行低轨卫星实时定轨具有较好的工程应用价值. 需要指出的是,本文的主要贡献为基于B3频点进行低轨卫星实时定轨试验,并评估B3频点实时定轨性能及其相对于常用单频导航频点(GPS和BDS B1)的优势,因此并未将提升观测量的绝对精度和定轨算法本身作为研究重点. 通过接收机环路的优化设计可提高观测性能,同时采用简化动力学定轨代替运动学定轨等措施,可进一步提升实时定轨精度.
4. 结 语
本文在对星载北斗接收机实测数据进行评估的基础上,利用导航信号模拟器进行了半物理仿真实验,重点对基于星载北斗接收机B3频点的低轨卫星实时定轨性能进行了评估. 实验结果表明:采用B1/B3双频伪距组合方式的定轨精度较低,位置精度为10 m左右,而采用GRAPHIC消电离层观测组合能实现定轨精度的大幅提升. 特别是在仅使用北斗二号14颗导航卫星的条件下,基于B3频点GRAPHIC组合的实时定轨精度达到2.79 m,优于B1频点的4.10 m,并与处于完全运行状态的GPS系统的定轨精度相当,可满足高精度实时定轨的需求. 在北斗三代全球导航系统建设完成之后,低轨卫星的定轨性能将得到进一步提升,可有力保障我国的航天任务.
参考文献
Precision real-time navigation of LEO satellites using global positioning system measurements
[J].DOI:10.1007/s10291-007-0080-x [本文引用: 1]
Efficient precise orbit determination of LEO satellites using GPS
[J].DOI:10.1016/S0273-1177(02)00298-3 [本文引用: 1]
Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations
[J].DOI:10.1007/s00190-017-1027-9 [本文引用: 1]
An enhanced algorithm to estimate BDS satellite's differential code biases
[J].
Orbit determination using real tracking data from FY3C-GNOS
[J].
Integrating BDS and GPS for precise relative orbit determination of LEO formation flying
[J].
Results and analysis of BDS precise orbit determination with the enhancement of Fengyun-3C
[J].
In-orbit performance of GNOS on-board FY3-C and the enhancements for FY3-D satellite
[J].DOI:10.1016/j.asr.2017.05.001 [本文引用: 1]
星载BDS/GPS低轨卫星定轨精度分析
[J].
Precision analysis of orbit determination with space-borne BDS and GPS measurements for LEO satellite
[J].
Generalized theory of code tracking with an early-late discriminator part I: lower bound and coherent processing
[J].DOI:10.1109/TAES.2009.5310316 [本文引用: 1]
Improvement of Klobuchar model for GNSS single-frequency ionospheric delay corrections
[J].
Kinematic GPS positioning of LEO satellites using ionosphere-free single frequency measurements
[J].
单频精密单点定位观测模型和电离层处理方法比较
[J].
Comparison of observation models and ionospheric elimination approaches for single frequency precise point positioning
[J].
浙江大学皮星二号实时精密自主定轨算法与半实物仿真
[J].DOI:10.3969/j.issn.1004-1699.2016.08.012 [本文引用: 1]
Precision real-time orbit determination algorithm and hardware-in-the-loop simulation for ZDPS-2 satellite
[J].DOI:10.3969/j.issn.1004-1699.2016.08.012 [本文引用: 1]
Real-time precise orbit determination for BDS satellites using the square root information filter
[J].
Kinematic orbit determination method optimization and test analysis for BDS satellites with short-arc tracking data
[J].
Kinematic single-frequency relative positioning for LEO formation flying mission
[J].DOI:10.1007/s10291-014-0410-8 [本文引用: 1]
新型皮卫星星载接收机设计
[J].DOI:10.3969/j.issn.1004-1699.2011.05.014 [本文引用: 1]
A new receiver structure of TT&C transponder for pico-satellite
[J].DOI:10.3969/j.issn.1004-1699.2011.05.014 [本文引用: 1]
Flexible attitude control design and on-orbit performance of the ZDPS-2 satellite
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}