

作为钻机的重要组成部分,钻杆的健康状况直接影响带钻机的运行状态. 在实际的工作中,由于工作环境恶劣,钻杆容易发生断裂或者松动,从而导致钻杆掉钻等事故[1]. 因此通过对钻杆的实时检测作出钻杆的故障诊断具有重要意义. 目前对于旋转机械设备的诊断,通常采用故障信号检测的方法,因此可以通过测得的钻杆加速度信号,采用信号处理的方法或算法模型对钻杆故障进行分类.
针对旋转机械设备的故障诊断,目前已经有较多学者提出了各种方法并取得一定的成果. 传统的故障诊断方法主要是选择和提取原始信号的时频域特征,通过傅里叶变换、小波变换、经验模态分解等信号处理方法,对故障进行分类[2-5]. 虽然这些方法对于故障识别有良好的效果,但同时存在明显的弊端. 例如傅里叶变化对于非平稳信号的检测无法得到有效分类;小波变换虽然不同于傅里叶变换,其变换窗口随着频率变化而变化,但是小波基的选择不同会使检测结果有显著差别,而且小波基一旦选定就无法改变,这对于局部特征信号无法较好识别;经验模态方法对于处理非线性、非平稳信号有良好的效果,但是对于扰动产生信号中断,模态分解容易产生模态混叠问题,因此也存在一定限制. 传统方法提取旋转机械故障特征的故障分类法不仅在适用性上存在一定局限性,还要求检测人员有极高的信号处理经验以及丰富的知识储备.
1. 1DCNN钻杆故障诊断模型
1.1. 卷积神经网络
图 1

图 1 卷积神经网络(CNN)结构示意图
Fig.1 Schematic diagram of convolutional neural network(CNN)structure
1.1.1. 卷积层
卷积层主要由多个卷积核构成. 卷积核运算是将核函数与局部图像进行运算,其实质是2个二维矩阵之间的离散卷积运算,运算原理[12]如下式所示:
式中:s、t为卷积核在x、y方向上的宽度,F为卷积核参数矩阵,G为与卷积核函数运算的局部图像矩阵,k为卷积核的尺寸.
一个卷积核(窗口)可以看作一个感受野[19],CNN通过卷积层运算获取图像的特征图. 每个卷积层拥有多个卷积核函数,通过权值共享的方式,同一卷积核以一定的步长与不同的局部图像进行运算时共享同一组权重,从而减少计算参数和计算量.
1.1.2. 池化层
式中:P为最大池化得到的特征矩阵,l为特征图的宽度,A为卷积层激活后的特征矩阵,w为池化区域的宽度.
1.1.3. 全连接层
全连接层将CNN网络中多层卷积和池化后的特征图铺平为一维向量输入,然后将每层输入通过式(3)计算输出,在最后一层通过式(4)输出诊断结果.
式中:
式中:O为输出结果矩阵,Wi和bi为第i种分类对应的权重以及偏置矩阵.
1.1.4. 激活函数
激活函数可以对层输出结果进行非线性变换,从而提升网络的表达能力. 常用的激活函数有sigmoid、tanh和ReLU:
本文设计的1DCNN模型通过在卷积层和全连接层中增加常用的ReLU激活函数来增加模型的非线性,从而提升模型的学习能力.
1.2. 一维卷积神经网络
一维卷积神经网络(1DCNN)本质上和卷积神经网络相同. CNN主要用于二维图像的特征识别,而1DCNN只有1个维度,因此被大量使用在时间序列的特征识别以及提取上. 虽然1DCNN只有1个维度,但其同样具备CNN对特征识别的平移不变性等优点. 不仅如此,在常用CNN中,通常采用堆叠式小卷积核代替大卷积核,例如在VGG[20]模型中,采用3个3×3的卷积核代替1个7×7的卷积核,从而以较少的参数获得相同的感受野,同时抑制过拟合. 但在1DCNN中,由于卷积核是一维的,大卷积核不会带来太多参数以及计算量. 为了获得较大感受野,模型可以采用较大宽度的卷积核,从而更加全面地获取序列的特征值[21-22].
在结构上,1DCNN与CNN几乎一样,同样包括一系列的卷积层和池化层,最后通过全连接层输出结果. 不同的是,在卷积层和池化层的计算上,由于1DCNN只提取一维序列的特征序列,在1DCNN中卷积层和池化层的运算如下式所示:
1.3. 1DCNN模型设计
卷积神经网络超参数的设计主要包括卷积核的大小,步长以及卷积核的数目和网络的深度,但其核心思想是获得更大感受野[19]. 本研究在设计1DCNN模型时,希望最后一层池化层的单位神经元可以获得较大更全面的感受野,从而可以获取更多故障信息.
由于钻杆的运动是周期性转动,本研究希望最后一层池化层的单位神经元可以获得至少一个周期的钻杆采集信号. 以钻杆的最低转速为标准,最后一层池化层的单位神经元在第一层卷积层的感受野至少要满足下式:
式中:V为最后为层池化层中单位神经元在第一层卷积层的最小感受野,
本次实验中采用的钻杆最低转速为20 r/min,采样频率为40 Hz,因此第一层卷积层的最小感受野至少要大于120个采样点.
在1DCNN中,第n层池化层的感受野
式中:
由式(11)可知,后一层的池化层神经元的感受野与前一层卷积层的卷积核宽度、步长以及池化层的大小有关. 当取主要影响因素研究时,式(11)可简化为
由式(12)可知,影响后一层池化层感受野的主要因素为上一层卷积层卷积核的步长以及池化层的大小. 如果模型固定每一层卷积层的步长和池化层的大小,便可以计算出卷积层和池化层的层数. 通常卷积神经网络选择池化层的大小为2,卷积核的步长为1或2. 为了满足最后一层池化层的最小感受野要求,以及考虑到网络架构不宜过深,本研究设计的1DCNN除最后一层卷积层步长为1,其余卷积层的步长均为2,池化层大小均为2. 模型通过4层卷积层与池化层运算,最后一层池化层获得的感受野为24×23=128,满足最小感受野(120个采样点)的要求. 在卷积核大小的选择上,由第1.2节可知,在1DCNN中选择较大的卷积核不会带来大量计算参数,因此选用宽度为9的大卷积核,其网络结构图如图2所示,具体参数如表1所示.
表 1 一维卷积神经网络参数
Tab.1
| 网络结构 | 卷积核大小 | 步长 | 卷积核数目 | 输出大小 | 填充模式 |
| 卷积层 | 9 | 2 | 16 | 512×16 | 相同 |
| 池化层 | 2 | 1 | 16 | 256×16 | 无 |
| 卷积层 | 9 | 2 | 32 | 128×32 | 相同 |
| 池化层 | 2 | 1 | 32 | 64×32 | 无 |
| 卷积层 | 9 | 2 | 32 | 32×64 | 相同 |
| 池化层 | 2 | 1 | 32 | 16×64 | 无 |
| 卷积层 | 9 | 1 | 64 | 16×128 | 相同 |
| 池化层 | 2 | 1 | 64 | 8×128 | 无 |
| 全连接 | 256 | 1 | 1 | 256×1 | 无 |
| 全连接 | 32 | 1 | 1 | 32×1 | 无 |
| softmax分类 | 7 | 1 | 1 | 7×1 | 无 |
图 2
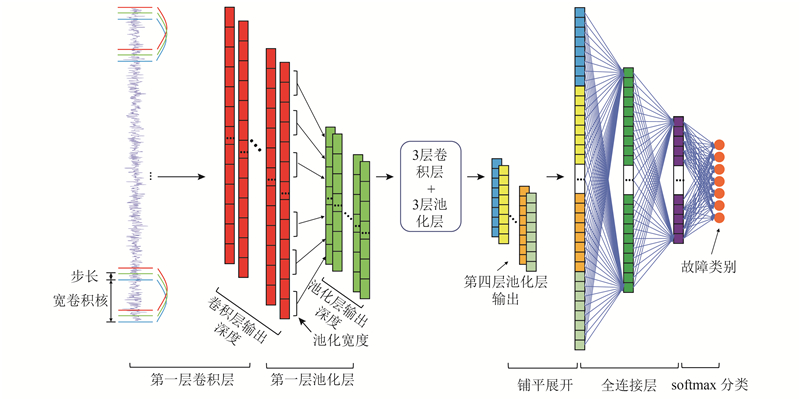
图 2 一维卷积神经网络结构图
Fig.2 Diagram of one-dimensional convolutional neural network structure
2. 1DCNN性能实验
2.1. 实验数据采集与数据集制作
本次实验数据均来自浙江大学宁波理工学院工程训练中心的钻杆模拟实验平台,平台结构如图3所示. 实验数据包括3种不同钻杆转速下的7种不同工作状态下的信号,均采用40 Hz信号采集卡采集.
图 3

图 3 钻杆模拟实验平台
1-回转装置;2-提升装置;3-钻杆;4-钻头; 5-样块;6-PC;7-采集卡 Drill pipe simulation experiment platform
采集正常情况下钻杆的加速度信号,记为L1;依次松动其中一节钻杆的2颗、4颗和6颗固定螺母,分别采集3种松动情况下钻杆的故障信号,记为L2、L3和L4;通过对模拟钻台其中一节钻杆进行不同程度的切割破坏,采集3种不同破坏程度下的故障信号,记为L5、L6和L7(钻杆破坏形式如图4所示). 重复以上操作,分别获得钻杆在20、35以及50 r/min的信号集. 由于本次实验保持电机的输出功率恒定,根据式(13)可知,不同转速代表钻杆受到不同的扭矩加载量.
图 4

式中:Pem为电机输出功率,T为扭矩加载量,n为转速,κ为比例系数.
为了实验方便,将采集的数据以1 024个点为一个样本,将每类信号划分为700个样本. 为了减少量纲的影响,提高模型的算法精度,对每段样本点分别作归一化处理:
最后将每一类的样本按照6∶2∶2的比例划分为训练集、验证集以及测试集,实验数据如表2所示.
表 2 钻杆故障数据集样本数量分布
Tab.2
| 故障类型 | 故障程度 | 标签 | 数据集A | 数据集B | 数据集C | ||||||||
| 训练集 | 验证集 | 测试集 | 训练集 | 验证集 | 测试集 | 训练集 | 验证集 | 测试集 | |||||
| 正常 | 无 | L1 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | ||
| 松动螺母 | 2颗 | L2 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | ||
| 4颗 | L3 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | |||
| 6颗 | L4 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | |||
| 断裂切口长度 | 56 mm | L5 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | ||
| 112 mm | L6 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | |||
| 168 mm | L7 | 420 | 140 | 140 | 420 | 140 | 140 | 420 | 140 | 140 | |||
| 合计 | 2 940 | 980 | 980 | 2 940 | 980 | 980 | 2 940 | 980 | 980 | ||||
2.2. 实验验证
为验证第1.3节提到的1DCNN结构的有效性与优越性,分别使用数据集A、B、C对模型进行评估. 以模型训练后的准确率(σ)以及损失函数曲线评估模型的有效性以及通过与现有的钻杆故障信号诊断模型对比体现其优越性.
图 5
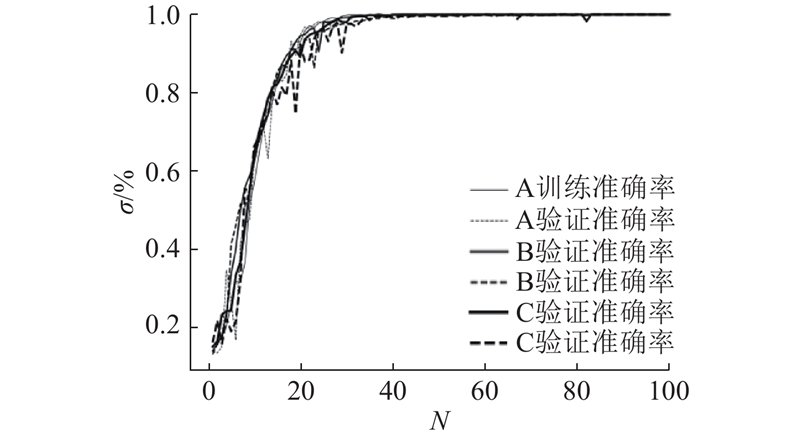
图 6

表 3 1DCNN模型在20 r/min工况下的诊断结果
Tab.3
| 实际 预测 | L1 | L2 | L3 | L4 | L5 | L6 | L7 |
| L1 | 1.000 | 0 | 0 | 0 | 0 | 0 | 0 |
| L2 | 0 | 0.975 | 0 | 0.025 | 0 | 0 | 0 |
| L3 | 0 | 0 | 1.000 | 0 | 0 | 0 | 0 |
| L4 | 0 | 0.013 | 0 | 0.987 | 0 | 0 | 0 |
| L5 | 0 | 0 | 0.038 | 0 | 0.962 | 0 | 0 |
| L6 | 0 | 0 | 0 | 0 | 0 | 1.000 | 0 |
| L7 | 0 | 0 | 0 | 0 | 0 | 0 | 1.000 |
表 4 1DCNN模型35 r/min工况下的诊断结果
Tab.4
| 实际 预测 | L1 | L2 | L3 | L4 | L5 | L6 | L7 |
| L1 | 1.000 | 0 | 0 | 0 | 0 | 0 | 0 |
| L2 | 0 | 1.000 | 0 | 0 | 0 | 0 | 0 |
| L3 | 0 | 0.013 | 0.987 | 0 | 0 | 0 | 0 |
| L4 | 0 | 0.013 | 0 | 0.962 | 0 | 0.025 | 0 |
| L5 | 0 | 0 | 0 | 0 | 0.987 | 0.013 | 0 |
| L6 | 0 | 0 | 0 | 0 | 0 | 1.000 | 0 |
| L7 | 0 | 0 | 0 | 0 | 0.025 | 0 | 0.975 |
表 5 1DCNN模型在50 r/min工况下的诊断结果
Tab.5
| 实际 预测 | L1 | L2 | L3 | L4 | L5 | L6 | L7 |
| L1 | 1.000 | 0 | 0 | 0 | 0 | 0 | 0 |
| L2 | 0 | 1.000 | 0 | 0 | 0 | 0 | 0 |
| L3 | 0 | 0 | 1.000 | 0 | 0 | 0 | 0 |
| L4 | 0 | 0 | 0.013 | 0.987 | 0 | 0 | 0 |
| L5 | 0.013 | 0 | 0.025 | 0 | 0.950 | 0 | 0.013 |
| L6 | 0 | 0 | 0 | 0 | 0 | 1.000 | 0 |
| L7 | 0 | 0.013 | 0 | 0 | 0 | 0.050 | 0.937 |
表 6 不同模型的故障诊断准确率对比
Tab.6
| 算法 | accuracy(×100%) | ||
| 20 r/min | 35 r/min | 50 r/min | |
| 小波-SVM | 85.0±2.3 | 87.5±3.1 | 91.0±2.8 |
| 粒子群-SVM | 87.2±4.3 | 88.3±2.6 | 88.7±1.8 |
| EWT-BP | 80.0±5.0 | 83.2±3.7 | 81.7±3.2 |
| EMD-BP | 81.7±1.8 | 83.3±1.9 | 85.6±2.1 |
| 1DCNN | 98.9±0.5 | 98.7±0.2 | 98.7±0.3 |
2.3. 适应性实验
2.3.1. 转速适应性实验
第2.2节实验中采用恒定转速下钻杆的故障数据来训练模型,并采用该转速下的钻杆故障数据来检验本文设计的1DCNN模型可行性与准确性. 在实际工况中,钻杆不可能始终保持某一恒定转速. 使用在一种转速下训练好的1DCNN模型,对不同钻速的钻杆故障信号进行检测具有重要的现实意义. 本节分别采用20、35和50 r/min故障数据训练出来的模型去诊断其他2类非改转速的故障数据来验证模型的适应能力. 诊断结果如表7所示. 表中,σave为平均准确率.
表 7 1DCNN模型转速适应性诊断结果
Tab.7
| 训练数据 | 测试数据 | σ/% | σave/% |
| A | B | 91.3 | 91.5 |
| C | 94.5 | ||
| B | A | 90.1 | |
| C | 89.2 | ||
| C | A | 92.7 | |
| B | 91.6 |
由表7可知,1DCNN模型具有良好的转速适应性,可通过由恒定转速数据训练的模型去诊断变转速下的钻杆故障信号,因此该模型具有一定的现实可使用性.
2.3.2. 土质适应性实验
表 8 1DCNN模型在不同土质下的故障诊断准确率对比
Tab.8
| 材质 | σ/% | ||
| 20 r/min | 35 r/min | 50 r/min | |
| 粗砂 | 98.9 | 99.3 | 98.5 |
| C10水泥 | 99.1 | 97.8 | 97.4 |
| C20水泥 | 97.9 | 98.3 | 98.5 |
| C30水泥 | 98.9 | 98.7 | 98.7 |
2.4. 抗噪性实验
在实际工况中,采集到的钻杆加速度信号总是夹杂着一定比例的噪声,因此诊断模型需要具有一定程度的抗噪性.
为了检验模型的抗噪性,首先要给测试样本增加噪声. 工业环境下的诊断信号噪声一般为高斯白噪声,为了模拟现实工况下的噪声信号,通过在原有的测试样本中叠加上不同比例的高斯白噪声,来获得带噪声的测试样本,如图7所示. 图中,n为样本的采集数据点个数,Ap为数据点的加速度值. 通过对含噪样本的诊断检验模型的抗噪性.
图 7

图 7 原始样本、噪声样本以及含噪样本示意图
Fig.7 Schematic diagram of original sample, noise sample and noise fusion sample
本次实验采用20 r/min的测试样本数据作为原始样本. 在此基础上增加不同比例的噪声信号. 通常采用信噪比(SNR)来描述信号受噪声的污染程度:
式中:
将原始样本调制成不同SNR的含噪信号,作为测试样本,将测试样本输入采用原始信号训练集训练出的1DCNN模型,最终得到实验结果如表9所示. 可知,在加入噪声之后依旧可以从模型中提取到不同故障的特征,具有较高的故障诊断率. 在噪声污染较小的情况下,模型的诊断准确率在95%以上,即使在噪声污染严重的情况下(SNR = −4),模型仍然具有76.33%的故障识别率. 因此1DCNN模型具有较强的抗噪性,能在噪声环境下有效提取故障信号的特征.
表 9 1DCNN模型抗噪性诊断结果
Tab.9
| SNR | σ/% | SNR | σ/% | |
| 3 | 99.5 | −1 | 98.1 | |
| 2 | 98.9 | −2 | 93.3 | |
| 1 | 98.6 | −3 | 86.9 | |
| 0 | 98.3 | −4 | 76.3 |
3. 结 语
本文提出了一种基于一维卷积神经网络的钻杆故障诊断模型. 该模型可以直接输入测试信号从而获得诊断结果,相比之前的钻杆诊断模型,省去了故障特征提取的过程. 通过模拟钻杆平台采集的数据对模型的性能进行测试,得到以下结论:
1)训练好的1DCNN诊断模型相比之前提出的诊断模型有更高的故障识别率,平均准确率在98.7%以上.
2)训练好的1DCNN模型有较强的转速适应能力,根据某一恒定转速样本训练出的模型可以用于不同转速下的钻杆故障诊断,而且有较高的故障诊断率. 同时模型具有较强的土质适应性,在不同土质中对钻杆的故障诊断率均在95%以上.
3)该1DCNN模型具有较强的抗噪性. 在噪声污染不大的情况下,故障诊断率只有轻微下降;即使在噪声污染很大情况下,准确率也达到了75%以上.
参考文献
Rolling bearing fault diagnosis using modified LFDA and EMD with sensitive feature selection
[J].DOI:10.1109/ACCESS.2017.2773460 [本文引用: 1]
Application of mother wavelet functions for automatic gear and bearing fault diagnosis
[J].DOI:10.1016/j.eswa.2009.12.051
Pseudo-fault signal assisted EMD for fault detection and isolation in rotating machines
[J].DOI:10.1016/j.ymssp.2016.03.007
Multiple-domain manifold for feature extraction in machinery fault diagnosis
[J].DOI:10.1016/j.measurement.2015.07.042 [本文引用: 1]
基于长短期记忆网络的轴承故障识别
[J].DOI:10.3969/j.issn.2095-1469.2018.04.09 [本文引用: 1]
Bearing fault identification based on long short-term memory networks
[J].DOI:10.3969/j.issn.2095-1469.2018.04.09 [本文引用: 1]
Rolling element bearing remaining useful life estimation based on a convolutional long-short-term memory network
[J].DOI:10.1016/j.procs.2018.01.106
Learning to monitor machine health with convolutional bi-directional LSTM networks
[J].DOI:10.3390/s17020273 [本文引用: 1]
Handwritten digit recognition with a back-propagation network
[J].
Gradient-based learning applied to document recognition
[J].DOI:10.1109/5.726791 [本文引用: 1]
Receptive fields, binocular interaction and functional architecture in the cat's visual cortex
[J].DOI:10.1113/jphysiol.1962.sp006837 [本文引用: 2]
A generic intelligent bearing fault diagnosis system using compact adaptive 1D CNN classifier
[J].DOI:10.1007/s11265-018-1378-3 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}