|
|
|
| Relative positioning algorithm based on robust adaptive estimation for micro-nano satellite |
Hao-ze WANG( ),Xiao-jun JIN*(),Cong HOU,Li-shan ZHOU,Zhao-bin XU,Zhong-he JIN ),Xiao-jun JIN*(),Cong HOU,Li-shan ZHOU,Zhao-bin XU,Zhong-he JIN |
| Micro-satellite Research Center, Zhejiang University, Hangzhou 310027, China |
|
|
|
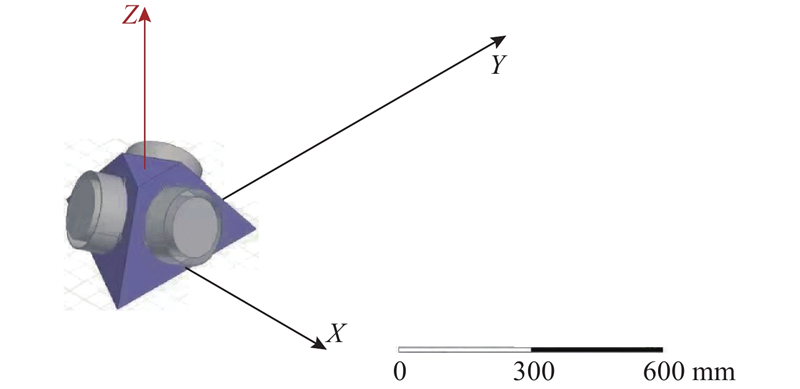
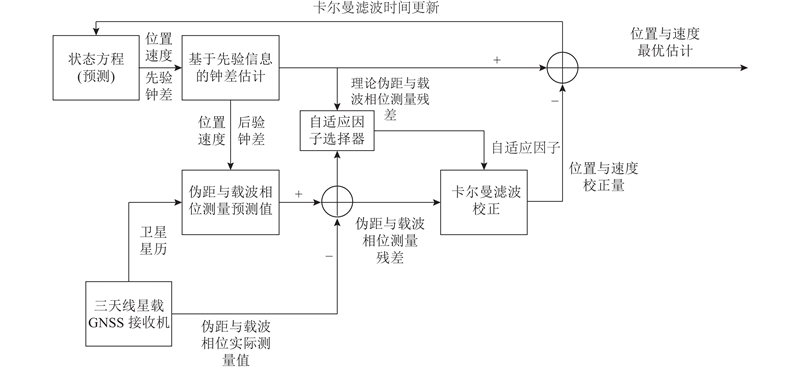
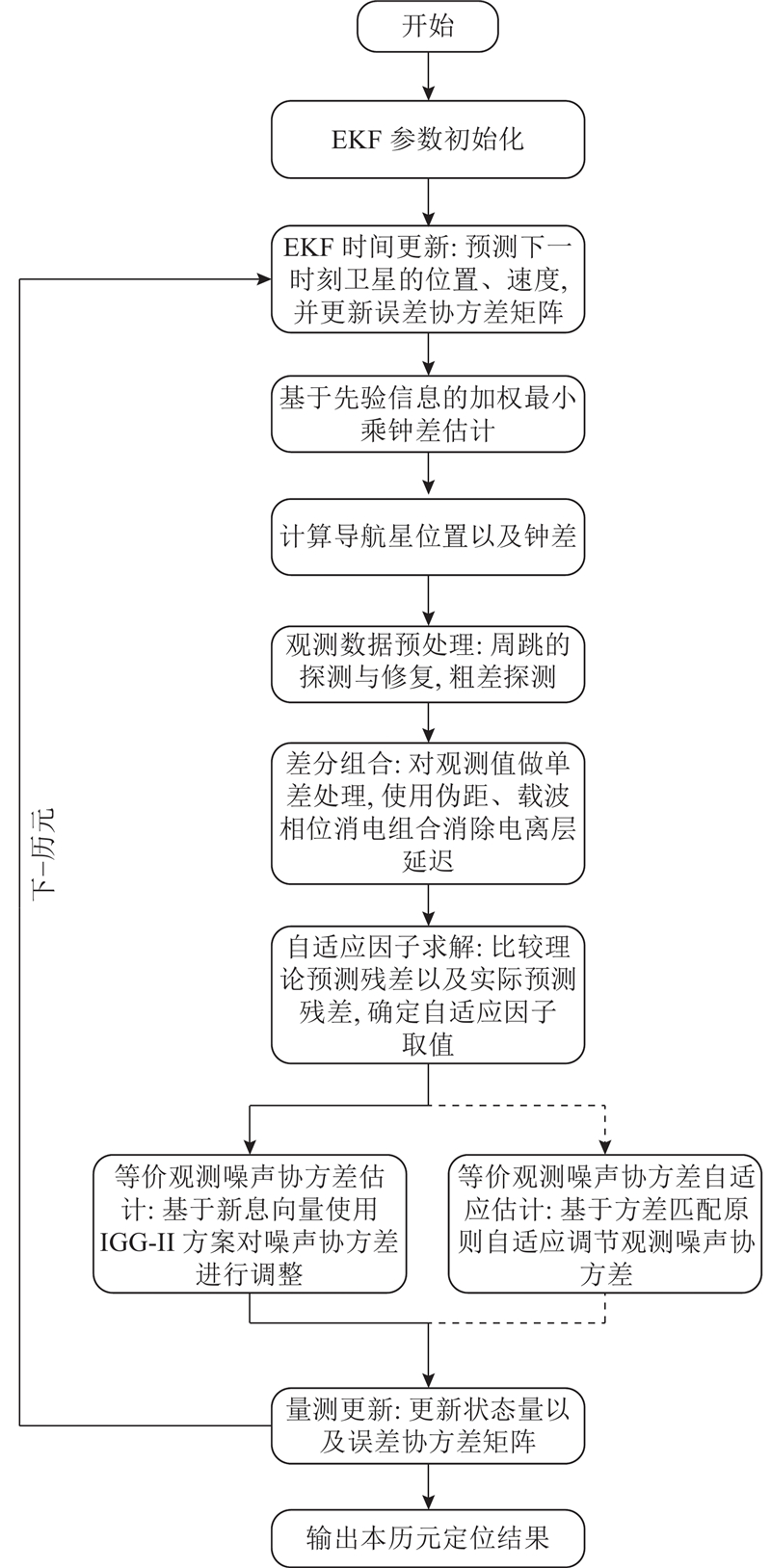
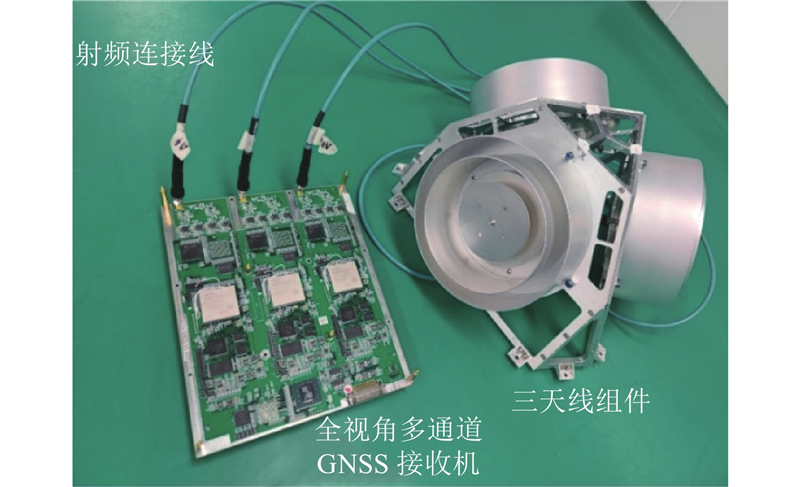
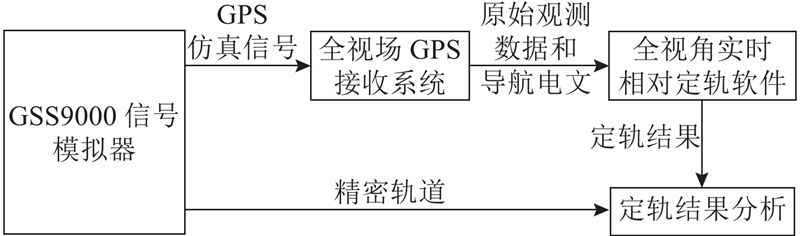
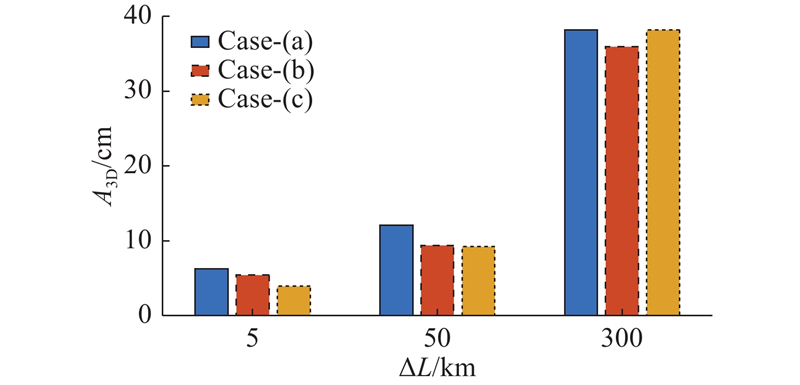
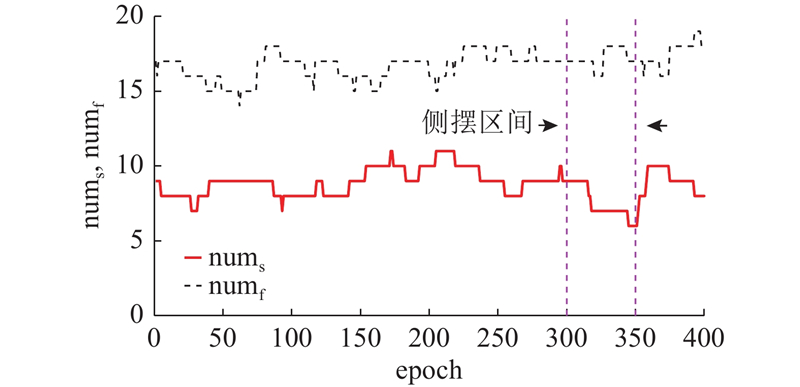
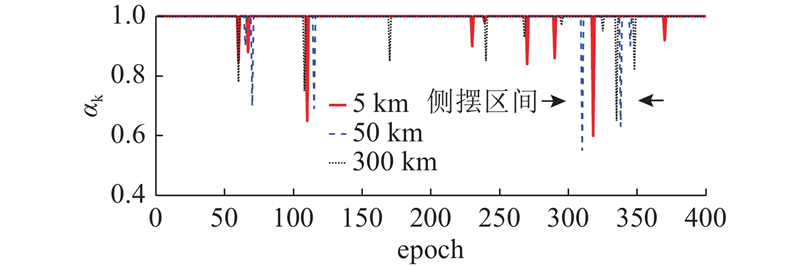
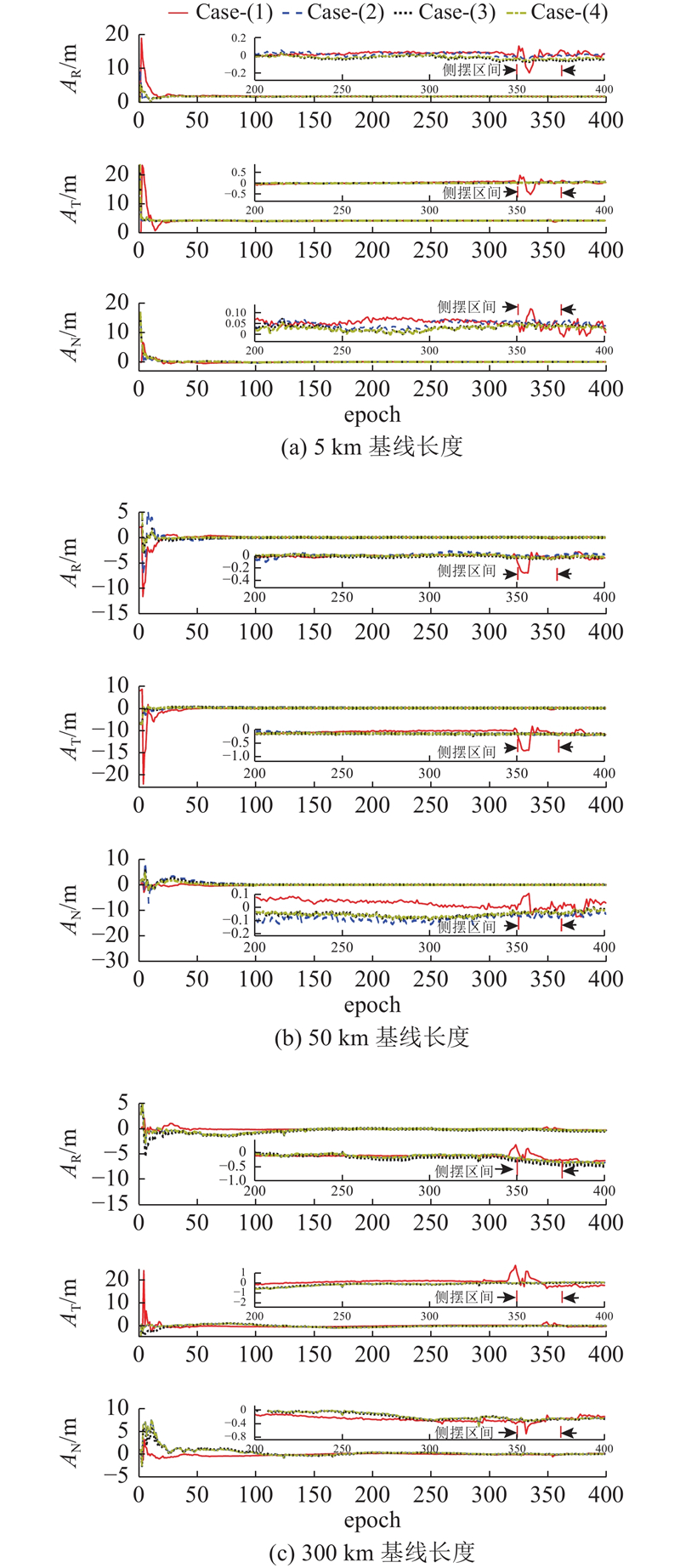
Abstract A solution consisting of a GPS receiver and a differential positioning system with a full-view antenna assembly was proposed, to solve the problem of diminished or even non-functional positioning performance during attitude maneuvering tasks conducted by micro-nano satellites formations. In the context of spaceborne high-dynamic environments, improvements were made to the pseudorange gross error detection method based on geometry free (GF) differential combination and attenuation window. With the help of robust adaptive extended Kalman filtering algorithm, the open-window estimation method of the observed noise covariance matrix based on the innovation vector was applied to the real-time difference algorithm. Comparative validation in different scenarios was carried out upon a semi-physical simulation platform, and the results demonstrate that the proposed filtering and estimation algorithm based on the full-view scheme has a substantial increase in the number of satellite-used and positioning accuracy compared with the extended Kalmen filter (EKF) algorithm of the conventional scheme in full-arc side-swing and interval "side-swing-return" maneuvers. In short and long baseline cases, centimeter and decimeter level relative positioning accuracy can be achieved.
|
|
Received: 07 December 2022
Published: 11 December 2023
|
|
|
| Fund: 国家自然科学基金资助项目(62073289) |
|
Corresponding Authors:
Xiao-jun JIN
E-mail: 22124024@zju.edu.cn;axemaster@zju.edu.cn
|
基于抗差自适应估计的微纳卫星相对定位算法
为了解决微纳卫星编队执行姿态机动任务时,差分定位性能降低甚至不能定位的问题,提出基于全视角天线组件的GPS接收和差分定位系统方案. 针对星载高动态环境,改进基于几何无关(GF)差分组合和衰减窗口的伪距粗差探测方法. 采用抗差自适应扩展卡尔曼滤波算法,将基于新息向量的观测噪声协方差矩阵开窗估计法应用于实时差分定位. 建立半物理仿真平台,开展不同场景下的差分定位性能对比验证. 结果表明,在全弧段侧摆与区间“侧摆-回正”机动条件下,所提出的基于全视角方案的滤波和估计算法相比于常规方案的扩展卡尔曼滤波(EKF)算法在定位星数、定位精度上均有大幅提升,在短、长基线情况下分别可以达到厘米、分米级的相对定位精度.
关键词:
实时相对定位,
微纳卫星,
GPS,
抗差自适应扩展卡尔曼滤波 (ARKF),
全视角接收系统,
抗差估计,
Sage滤波
|
|
| [1] |
AMBROSINI M. The key role and advantages of GNSS Precise relative positioning in spacecraft formation flying missions design, analysis and operations [C]// Proceedings of the 2018 SpaceOps Conference. Marseille: SpaceOps, 2018.
|
|
|
| [2] |
BISNATH S. Relative positioning and real-time Kinematic (RTK) [M]// Position, navigation, and timing technologies in the 21st century: integrated satellite navigation, sensor systems, and civil applications. Hoboken: John Wiley & Sons, Inc 2020: 481-502.
|
|
|
| [3] |
KAWANO I, MOKUNO M, KASAI T, et al First autonomous rendezvous using relative GPS navigation by ETS‐VII[J]. Navigation, 2001, 48 (1): 49- 56
doi: 10.1002/j.2161-4296.2001.tb00227.x
|
|
|
| [4] |
EBINUMA T. Precision spacecraft rendezvous using global positioning system: an integrated hardware approach [M]. Ann Arbor: The University of Texas at Austin, 2001.
|
|
|
| [5] |
BUSSE F D. Precise formation-state estimation in low earth orbit using carrier differential GPS [M]. Ann Arbor: Stanford University, 2003.
|
|
|
| [6] |
LEUNG S, MONTENBRUCK O Real-time navigation of formation-flying spcacecraft using global-positioning- system measurements[J]. Journal of Guidance, Control, and Dynamics, 2005, 28 (2): 226- 235
doi: 10.2514/1.7474
|
|
|
| [7] |
D'AMICO S, ARDAENS J S, MONTENBRUCK O. Navigation of formation flying spacecraft using GPS: the PRISMA technology demonstration [C]// Proceedings of the Proceedings of the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation . Washington: ION, 2009: 2331-5911.
|
|
|
| [8] |
李仕学, 沈欣, 姚璜, 等 面向区域成像任务的环月卫星侧摆角优化方法[J]. 武汉大学学报: 信息科学版, 2019, 44 (4): 593- 600
LI Shi-xue, SHEN Xin, YAO Huang, et al Optimization method of circumlunar satellite lateral swing angle for regional imaging missions[J]. Journal of Wuhan University: Information Science Edition, 2019, 44 (4): 593- 600
|
|
|
| [9] |
CARLIN L, HAUSCHILD A, MONTENBRUCK O Precise point positioning with GPS and Galileo broadcast ephemerides[J]. GPS Solutions, 2021, 25 (2): 1- 13
|
|
|
| [10] |
MONTENBRUCK O, KUNZI F, HAUSCHILD A Performance assessment of GNSS-based real-time navigation for the Sentinel-6 spacecraft[J]. GPS Solutions, 2022, 26 (1): 1- 11
doi: 10.1007/s10291-021-01184-1
|
|
|
| [11] |
谢钢. GPS 原理与接收机设计 [M]. 北京: Electronics Industry Press, 2009.
|
|
|
| [12] |
ALKAN R M Cm-level high accurate point positioning with satellite-based GNSS correction service in dynamic applications[J]. Journal of Spatial Science, 2021, 66 (2): 351- 9
doi: 10.1080/14498596.2019.1643795
|
|
|
| [13] |
李林阳, 吕志平, 周海涛, 等 对 TurboEdit 周跳探测及修复算法的改进[J]. 测绘科学技术学报, 2015, 32 (2): 140- 145
LI Lin-yang, LV Zhi-ping, ZHOU Hai-tao, et al Improvement to TurboEdit weekly jump detection and repair algorithm[J]. Journal of Surveying and Mapping Science and Technology, 2015, 32 (2): 140- 145
|
|
|
| [14] |
孙荣恒, 伊亨云, 刘琼荪, 等. 概率论和数理统计[M]. 重庆: 重庆大学出版社, 2000.
|
|
|
| [15] |
BLEWITT G An automatic editing algorithm for GPS data[J]. Geophysical Research Letters, 1990, 17 (3): 199- 202
doi: 10.1029/GL017i003p00199
|
|
|
| [16] |
LIU H, XIN M, WEI J, et al GNSS doppler velocity based on adaptive robust Kalman filtering[J]. The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2020, 42: 1005- 1012
|
|
|
| [17] |
OLIVER M, GILL E. 卫星轨道: 模型, 方法和应用 [M]. 王家松, 祝开建, 胡小工, 译. 北京: 国防工业出版社, 2012.
|
|
|
| [18] |
MEHRA R Approaches to adaptive filtering[J]. IEEE Transactions on Automatic Control, 1972, 17 (5): 693- 698
doi: 10.1109/TAC.1972.1100100
|
|
|
| [19] |
李兆洋. 基于自适应卡尔曼滤波的 GPS 精密单点定位研究 [D]. 成都: 西南交通大学, 2017.
LI Zhao-yang. Research on GPS precision single point positioning based on adaptive Kalman filter [D]. Chengdu: Southwest Jiaotong University, 2017
|
|
|
| [20] |
杨元喜. 自适应动态导航定位 [M]. 北京: 测绘出版社, 2006.
|
|
|
| [21] |
AVALLONE A, BRIOLE P, AGATZA-BALODIMOU A M, et al Analysis of eleven years of deformation measured by GPS in the Corinth Rift Laboratory area[J]. Comptes Rendus Geoscience, 2004, 336 (4/5): 301- 311
|
|
|
| [22] |
KROES R. Precise relative positioning of formation flying spacecraft using GPS [M]. Delft: Nederlandse Commissie voor Geodesie, Netherlands Geodetic Commission, 2006.
|
|
|
| [23] |
余鑫, 金小军, 莫仕明, 等 基于北斗 B3 频点的低轨卫星实时定轨性能评估[J]. 浙江大学学报: 工学版, 2020, 54 (3): 589- 596
YU Xin, JIN Xiao-jun, MO Shi-ming, et al Real-time orbiting performance evaluation of low-orbiting satellites based on BeiDou B3 frequency points[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (3): 589- 596
|
|
|
| [24] |
肖国锐, 隋立芬, 陈泉余, 等 利用接收机钟差建模提升 PPP 收敛速度及精度[J]. 测绘科学技术学报, 2015, 32 (6): 555- 558
XIAO Guo-rui, SUI Li-fen, CHEN Quan-yu, et al Improving the convergence speed and accuracy of PPP by using receiver clock difference modeling[J]. Journal of Surveying and Mapping Science and Technology, 2015, 32 (6): 555- 558
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|