|
|
|
| Continuous kinematics prediction of lower limbs based on phase division |
You-kang DUAN1,2( ),Xiao-gang CHEN1,*(),Jian GUI3,Bin MA3,4,Shun-fen LI1,Zhi-tang SONG1 ),Xiao-gang CHEN1,*(),Jian GUI3,Bin MA3,4,Shun-fen LI1,Zhi-tang SONG1 |
1. Shanghai Institute of Microsystem and Information Technology, Chinese Academy of Sciences, Shanghai 200050, China
2. University of Chinese Academy of Sciences, Beijing 100049, China
3. Shanghai Advanced Research Institute, Chinese Academy of Sciences, Shanghai 200125, China
4. China Research Institute JIU YI, Shanghai 201200, China |
|
|
|
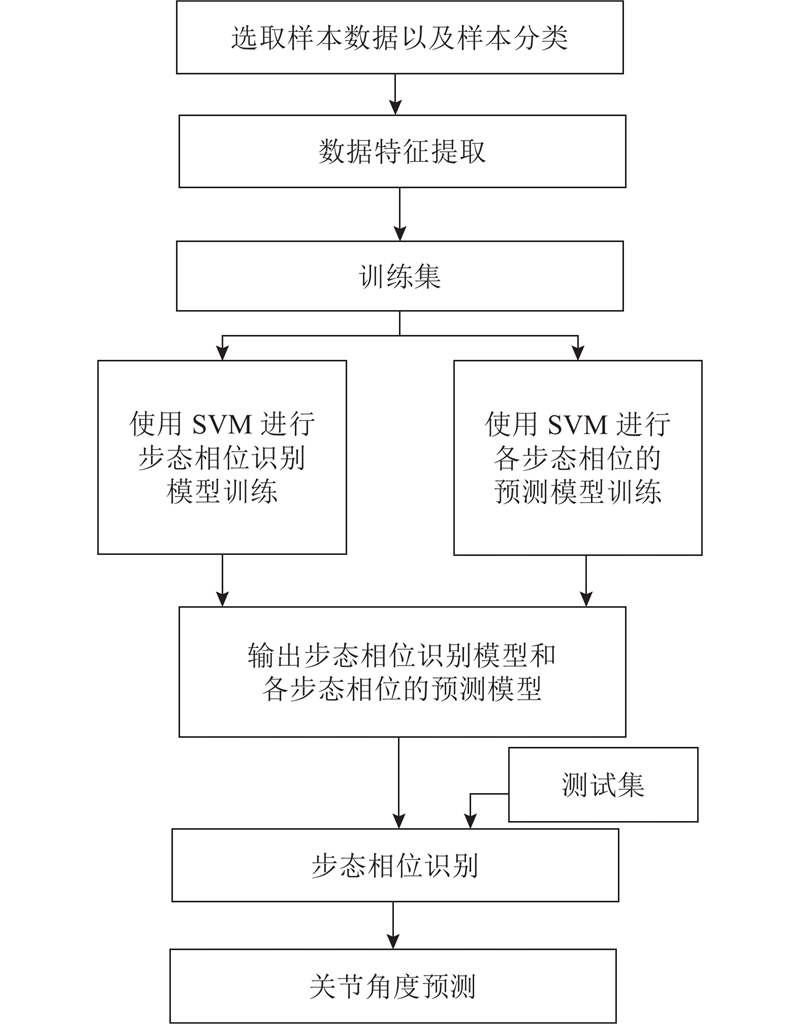
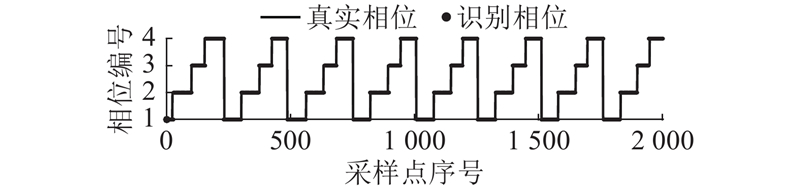
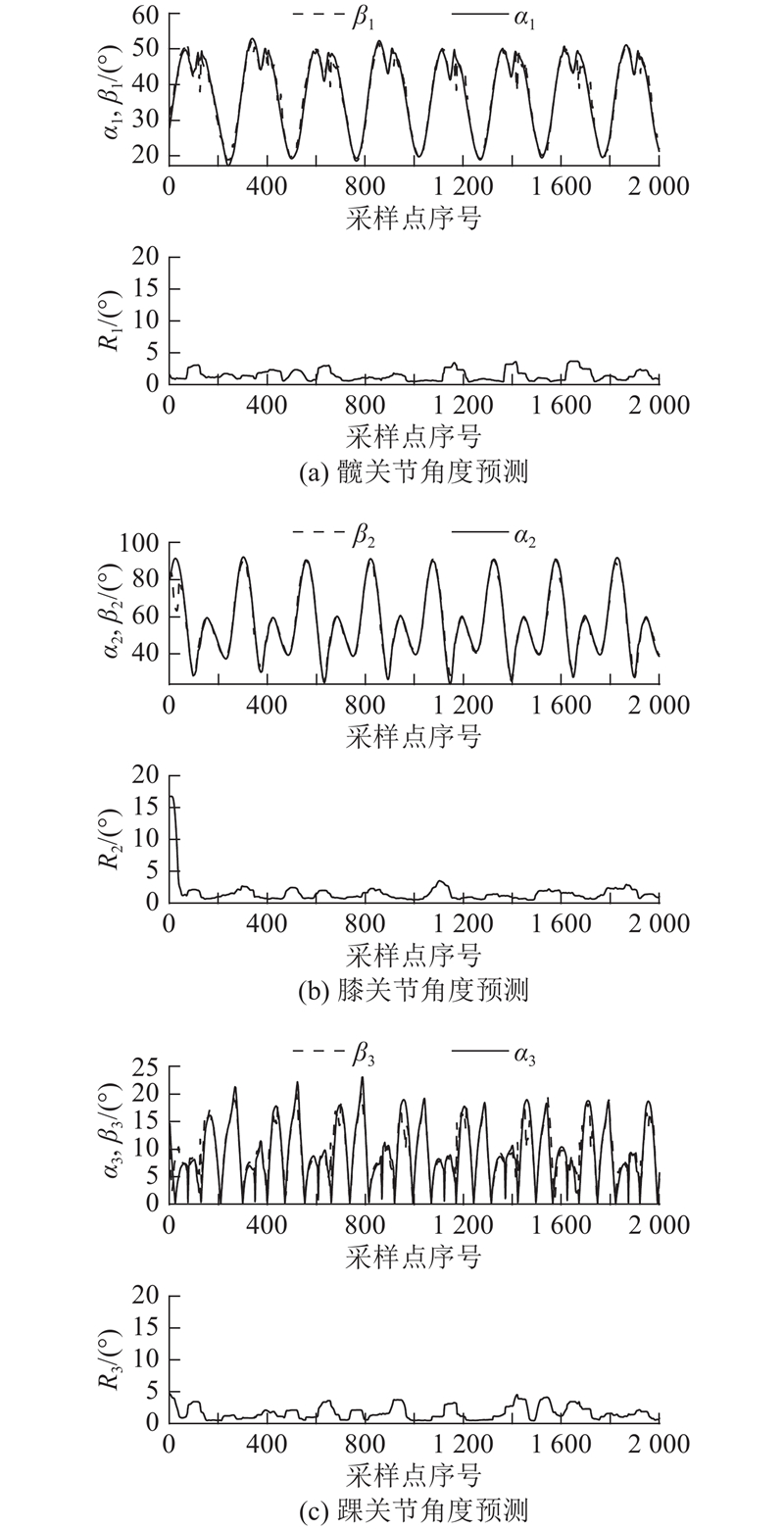
Abstract A method of establishing a prediction model for each gait phase was adopted in order to achieve more accurate prediction of continuous movement of lower limbs for specific individual movement characteristics and use a shorter time to train the prediction model. The prediction model of the current phase was used to predict the joint angle after identifying the current gait phase. Support vector machine (SVM) was used to verify the proposed method. The experimental results show that the prediction method of continuous motion of lower limbs based on phase division has higher prediction accuracy and shorter model training time than the prediction method of joint angle modeling of the entire motion state. The correlation coefficients between the predicted results of the hip, knee, and ankle joints and the true values are all greater than 0.99. The average root mean square error of the predicted angle values and the true values is less than 2° each time, and the training time is shortened by 4.0~5.0 times.
|
|
Received: 12 May 2020
Published: 05 January 2021
|
|
|
|
Corresponding Authors:
Xiao-gang CHEN
E-mail: dyk@mail.sim.ac.cn;chenxg@mail.sim.ac.cn
|
基于相位划分的下肢连续运动预测
为了实现针对特定个体的运动特点进行更精确的下肢连续运动预测和用更短的时间开展预测模型训练,采用对每个步态相位都建立预测模型的方法. 在识别出当前的步态相位后,使用当前相位的预测模型进行关节角度的预测. 使用支持向量机(SVM),对提出的方法进行验证. 实验表明,采用基于相位划分的下肢连续运动预测方法相比于对整个运动状态进行关节角度建模的预测方法,具有更高的预测精度和更短的模型训练时间. 髋、膝、踝关节的预测结果与真实值的相关系数均大于0.99,每次预测的角度与真实值的平均均方根误差均小于2°,训练时间缩短4.0~5.0倍.
关键词:
相位划分,
运动意图识别,
关节角度预测,
外骨骼机器人,
表面肌电信号
|
|
| [1] |
龙亿. 下肢外骨骼人体运动预测与人机协调控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
LONG Yi. Research on human body motion prediction and human-machine coordinated control technology of lower exoskeletonx [D]. Harbin: Harbin Institute of Technology, 2017.
|
|
|
| [2] |
俞毕洪. 基于表面肌电信号的穿戴式人体行为识别系统[D]. 杭州: 浙江大学, 2018.
YU Bi-hong. Wearable human behavior recognition system based on surface EMG signals [D]. Hangzhou: Zhejiang University, 2018.
|
|
|
| [3] |
丁其川, 熊安斌, 赵新刚, 等 基于表面肌电的运动意图识别方法研究及应用综述[J]. 自动化学报, 2016, 42 (1): 13- 25
DING Qi-chuan, XIONG An-bin, ZHAO Xin-gang, et al Research and application review of motion intention recognition method based on surface EMG[J]. Journal of Automation, 2016, 42 (1): 13- 25
|
|
|
| [4] |
AI Q, ZHANG Y, QI W, et al Research on lower limb motion recognition based on fusion of sEMG and accelerometer signals[J]. Symmetry, 2017, 9 (8): 147- 166
doi: 10.3390/sym9080147
|
|
|
| [5] |
ZHANG F, LI P F, HOU Z G, et al sEMG-based continuous estimation of joint angles of human legs by using BP neural network[J]. Neurocomputing, 2011, 78 (1): 139- 148
|
|
|
| [6] |
隋修武, 石峰 基于改进MPSO-SVM算法的下肢连续运动预测模型[J]. 天津工业大学学报, 2019, 38 (6): 69- 75
SUI Xiu-wu, SHI Feng Prediction model of lower limb continuous motion based on improved MPSO-SVM algorithm[J]. Journal of Tianjin University of Technology, 2019, 38 (6): 69- 75
doi: 10.3969/j.issn.1671-024x.2019.06.012
|
|
|
| [7] |
徐俊武, 沈林勇, 章亚男, 等 利用健肢sEMG信号对康复机械腿进行映射控制[J]. 工业控制计算机, 2019, 32 (5): 8- 10
XU Jun-wu, SHEN Lin-yong, ZHANG Ya-nan, et al Mapping control of rehabilitation mechanical legs using sEMG signals of healthy limbs[J]. Industrial Control Computer, 2019, 32 (5): 8- 10
doi: 10.3969/j.issn.1001-182X.2019.05.004
|
|
|
| [8] |
TIPPING M E Sparse bayesian learning and the relevance vector machine[J]. Journal of Machine Learning Research, 2001, 1 (3): 211- 244
|
|
|
| [9] |
AU S K, WEBER J, HERR H Powered ankle foot prosthesis improves walking metabolic economy[J]. IEEE Transactions on Robotics, 2009, 25 (1): 51?66
|
|
|
| [10] |
张琴, 骆无意, 黄波, 等 基于肌电信号的下肢关节连续运动预测[J]. 华中科技大学学报: 自然科学版, 2017, 45 (10): 128- 132
ZHANG Qin, LUO Wu-yi, HUANG Bo, et al Prediction of continuous motion of lower limb joints based on EMG signals[J]. Journal of Huazhong University of Science and Technology: Natural Science Edition, 2017, 45 (10): 128- 132
|
|
|
| [11] |
CAI S, CHEN Y, HUANG S, et al SVM-based classification of sEMG signals for upper-limb self-rehabilitation training[J]. Front Neurorobot, 2019, 13: 31
doi: 10.3389/fnbot.2019.00031
|
|
|
| [12] |
陈树, 张继中 基于自适应均值粒子群算法的 SVM 参数优化方法[J]. 测控技术, 2018, 37 (4): 6- 10
CHEN Shu, ZHANG Ji-zhong SVM parameter optimization method based on adaptive mean particle swarm optimization[J]. Measurement and Control Technology, 2018, 37 (4): 6- 10
doi: 10.3969/j.issn.1000-8829.2018.04.002
|
|
|
| [13] |
范光辉, 葛科铎, 王璐, 等 基于下肢表面肌电信号的动作模式识别研究[J]. 齐齐哈尔大学学报: 自然科学版, 2018, 34 (6): 44- 48
FAN Guang-hui, GE Ke-duo, WANG Lu, et al Research on the action pattern recognition based on the electromyographic signal of the lower limb surface[J]. Journal of Qiqihar University: Natural Science Edition, 2018, 34 (6): 44- 48
|
|
|
| [14] |
SHULTZ A H, LAWSON B E, GOLDFARB M Variable cadence walking and ground adaptive standing with a powered ankle prosthesis[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24 (4): 495- 505
doi: 10.1109/TNSRE.2015.2428196
|
|
|
| [15] |
张仁志, 崔慧娟 基于短时能量的语音端点检测算法研究[J]. 电声技术, 2005, 7: 52- 54
ZHANG Ren-zhi, CUI Hui-juan Research on speech endpoint detection algorithm based on short-term energy[J]. Electronic Acoustic Technology, 2005, 7: 52- 54
doi: 10.3969/j.issn.1002-8684.2005.07.015
|
|
|
| [16] |
卢祖能, 曾庆杏, 李承晏, 等. 实用肌电图学[M]. 北京: 人民卫生出版社, 2000: 424-434.
|
|
|
| [17] |
戴虹, 钱晋武, 张震, 等 GRNN在肌电预测踝关节运动中的应用[J]. 仪器仪表学报, 2013, 34 (4): 845- 852
DAI Hong, QIAN Jin-wu, ZHANG Zhen, et al Application of GRNN in ankle movement prediction based on surface electromyography[J]. Chinese Journal of Scientific Instrument, 2013, 34 (4): 845- 852
doi: 10.3969/j.issn.0254-3087.2013.04.020
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|