|
|
|
| Prediction of lane-changing behavior integrating multi-vehicle style perception and interaction features |
Zeyi HAN( ),Wenxuan WANG*(),Yuanqing WANG ),Wenxuan WANG*(),Yuanqing WANG |
| School of Transportation Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
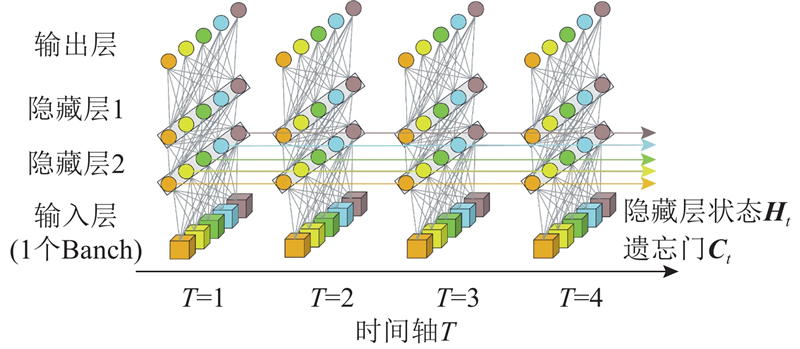
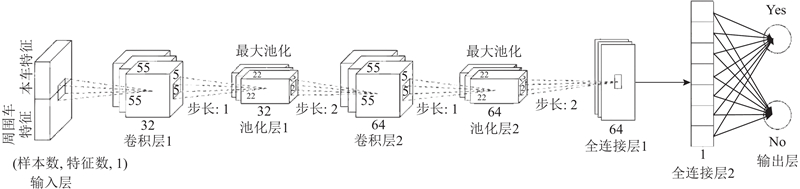
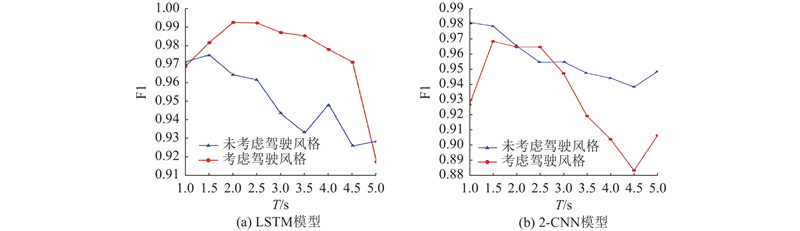
Abstract A comprehensive lane-change prediction method integrating driving style recognition, vehicle characteristics, interaction features, traffic flow characteristics, and truck ratio was proposed, in order to address the limitations of existing lane-change prediction models in modeling the multi-vehicle driving styles of lane-changing and surrounding vehicles and their interaction features, as well as their insufficient consideration of the influencing factors of lane-changing behavior. Based on the HighD dataset, basic and interaction features of lane-changing and surrounding vehicles were extracted, and statistical indicators under different time windows were calculated. Principal component analysis and K-means clustering were employed to quantify multi-vehicle driving styles during lane-changing. Subsequently, Long Short-Term Memory (LSTM) networks and double-layer Convolutional Neural Networks (2-CNN) were used to compare predictive performance across time windows. Results showed that incorporating multi-vehicle driving styles and interaction features improved accuracy by 5.64%, with the LSTM achieving a maximum F1-score of 99.26% under a 2.0-second window. Furthermore, the combined contribution of vehicle length, truck ratio, traffic density, and the interaction-aware driving style features of lane-changing vehicles reached 11.08%. Overall, the proposed method enhanced the accuracy of lane-change behavior prediction and the interpretability of influencing factors, providing insights for autonomous driving and traffic management.
|
|
Received: 23 April 2025
Published: 19 March 2026
|
|
|
| Fund: 国家自然科学基金资助项目(52362050);陕西省重点研发计划资助项目(2024GX-ZDCYL-02-14,2025SF-GJHX2-13);陕西省自然科学基金青年科学基金资助项目(2025JC-YBQN-519);陕西省秦创原引用高层次创新创业人才项目(QCYRCXM-2023-110);中国博士后科学基金资助项目(2024M752739);长安大学青年学者学科交叉团队建设项目(300104240924);陕西省三秦英才引进计划-优秀青年工程技术人才项目. |
|
Corresponding Authors:
Wenxuan WANG
E-mail: 2025034008@chd.edu.cn;wangwenxuan123@chd.edu.cn
|
融合多车风格感知与交互特征的换道行为预测
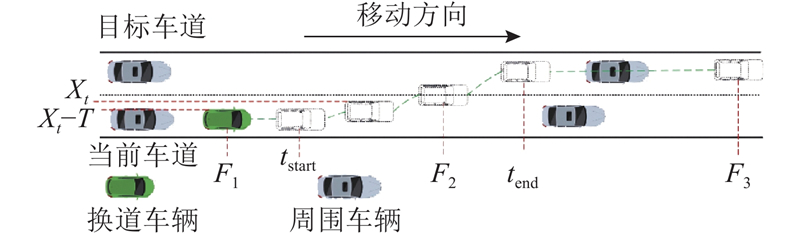
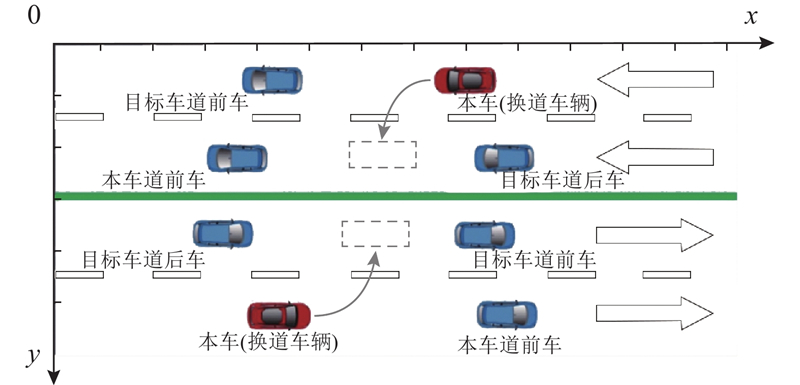
现有换道预测模型未能有效建模换道车辆与周围车辆的多车驾驶风格及车辆交互特征,且对换道行为影响因素考虑不足. 为此,提出综合驾驶风格识别、车辆特征、交互特征、交通流特征、货车比例的换道行为预测方法. 基于HighD数据集,提取换道车辆及周围车辆的基础特征和交互特征,并计算不同窗口时间下的统计学指标,通过主成分分析与K-means聚类量化换道多车驾驶风格. 使用长短时记忆网络模型和双层卷积神经网络模型对不同时间窗口下的预测性能进行比较. 结果显示,多车驾驶风格及车辆交互特征建模使预测精度提升了5.64%;长短时记忆模型在2.0 s时间窗口下的F1值最高,为99.26%;车辆长度、货车比例、交通流密度与考虑车辆交互特征的换道车辆驾驶风格的联合特征贡献率达11.08%. 结果表明,所提出的换道行为预测方法能有效提升预测的准确性,并增强对换道行为影响因素的可解释性,为自动驾驶与交通管理提供参考.
关键词:
换道行为预测,
LSTM模型,
HighD数据,
车辆交互特征,
交通流特征,
驾驶风格
|
|
| [1] |
NHTSA. Traffic safety facts 2020: a compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system [R]. Washington, DC: National Highway Traffic Safety Administration, 2022.
|
|
|
| [2] |
ZHANG Y, ZOU Y, XIE Y, et al Identifying dynamic interaction patterns in mandatory and discretionary lane changes using graph structure[J]. Computer-Aided Civil and Infrastructure Engineering, 2024, 39 (5): 638- 655
doi: 10.1111/mice.13099
|
|
|
| [3] |
ZHANG C, WANG W, CHEN Z, et al Shareable driving style learning and analysis with a hierarchical latent model[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25 (9): 11471- 11484
doi: 10.1109/TITS.2024.3374771
|
|
|
| [4] |
WANG Y, QU W, GE Y, et al Effect of personality traits on driving style: psychometric adaption of the multidimensional driving style inventory in a Chinese sample[J]. PLoS One, 2018, 13 (9): e0202126
doi: 10.1371/journal.pone.0202126
|
|
|
| [5] |
ADAVIKOTTU A, VELAGA N R Modeling the impact of driving aggression on lane change performance measures: steering compensatory behavior, lane change execution duration and crash probability[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2024, 103: 526- 553
doi: 10.1016/j.trf.2024.05.001
|
|
|
| [6] |
MOZAFFARI S, ARNOLD E, DIANATI M, et al Early lane change prediction for automated driving systems using multi-task attention-based convolutional neural networks[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7 (3): 758- 770
doi: 10.1109/TIV.2022.3161785
|
|
|
| [7] |
XU T, ZHANG Z, WU X, et al Recognition of lane-changing behaviour with machine learning methods at freeway off-ramps[J]. Physica A: Statistical Mechanics and Its Applications, 2021, 567: 125691
doi: 10.1016/j.physa.2020.125691
|
|
|
| [8] |
KHELFA B, BA I, TORDEUX A Predicting highway lane-changing maneuvers: a benchmark analysis of machine and ensemble learning algorithms[J]. Physica A: Statistical Mechanics and Its Applications, 2023, 612: 128471
doi: 10.1016/j.physa.2023.128471
|
|
|
| [9] |
XUE Q, XING Y, LU J An integrated lane change prediction model incorporating traffic context based on trajectory data[J]. Transportation Research Part C: Emerging Technologies, 2022, 141: 103738
doi: 10.1016/j.trc.2022.103738
|
|
|
| [10] |
GONAH N, SALAMA H, ALI M, et al An evaluation of the impact of truck-lane restriction strategies on traffic operation characteristics[J]. Innovative Infrastructure Solutions, 2025, 10 (4): 130
doi: 10.1007/s41062-025-01928-9
|
|
|
| [11] |
ROH C G, JEON H, SON B Do heavy vehicles always have a negative effect on traffic flow?[J]. Applied Sciences, 2021, 11 (12): 5520
doi: 10.3390/app11125520
|
|
|
| [12] |
KESTING A, TREIBER M, HELBING D General lane-changing model MOBIL for car-following models[J]. Transportation Research Record: Journal of the Transportation Research Board, 2007, 1999 (1): 86- 94
doi: 10.3141/1999-10
|
|
|
| [13] |
TOLEDO T, KOUTSOPOULOS H N, BEN-AKIVA M E Modeling integrated lane-changing behavior[J]. Transportation Research Record: Journal of the Transportation Research Board, 2003, 1857 (1): 30- 38
doi: 10.3141/1857-04
|
|
|
| [14] |
LI C, CHEN H, XIONG Y, et al Analysis of Chinese typical lane change behavior in car–truck heterogeneous traffic flow from UAV view[J]. Electronics, 2022, 11 (9): 1398
doi: 10.3390/electronics11091398
|
|
|
| [15] |
JIA Y, ZHANG Z, LI X, et al Driving style tendency quantification method based on short-term lane change feature extraction[J]. Sustainability, 2025, 17 (8): 3563
doi: 10.3390/su17083563
|
|
|
| [16] |
ZHANG Y, CHEN Y, GU X, et al A proactive crash risk prediction framework for lane-changing behavior incorporating individual driving styles[J]. Accident Analysis and Prevention, 2023, 188: 107072
|
|
|
| [17] |
GAO K, LI X, HU L, et al Instantaneous lane-changing type aware lane change prediction based on LSTM in mixed traffic scenario[J]. Journal of Circuits, Systems and Computers, 2022, 31 (10): 2250180
doi: 10.1142/S0218126622501808
|
|
|
| [18] |
CHEN S, PIAO L, ZANG X, et al Analyzing differences of highway lane-changing behavior using vehicle trajectory data[J]. Physica A: Statistical Mechanics and Its Applications, 2023, 624: 128980
doi: 10.1016/j.physa.2023.128980
|
|
|
| [19] |
KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems [C]// International Conference on Intelligent Transportation Systems. Maui: IEEE, 2018: 2118–2125.
|
|
|
| [20] |
ARBELAITZ O, GURRUTXAGA I, MUGUERZA J, et al An extensive comparative study of cluster validity indices[J]. Pattern Recognition, 2013, 46 (1): 243- 256
doi: 10.1016/j.patcog.2012.07.021
|
|
|
| [21] |
BERGSTRA J, BENGIO Y Random search for hyper-parameter optimization[J]. Journal of Machine Learning Research, 2012, 13: 281- 305
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|