|
|
|
| Pair-wise point cloud registration method based on normal distribution similarity |
Zhaolong LI( ),Shanmin PANG*(),Chaoyu WANG,Yifeng WANG,Pengcheng SHI ),Shanmin PANG*(),Chaoyu WANG,Yifeng WANG,Pengcheng SHI |
| School of Software Engineering, Xi’an Jiaotong University, Xi’an 710049, China |
|
|
|
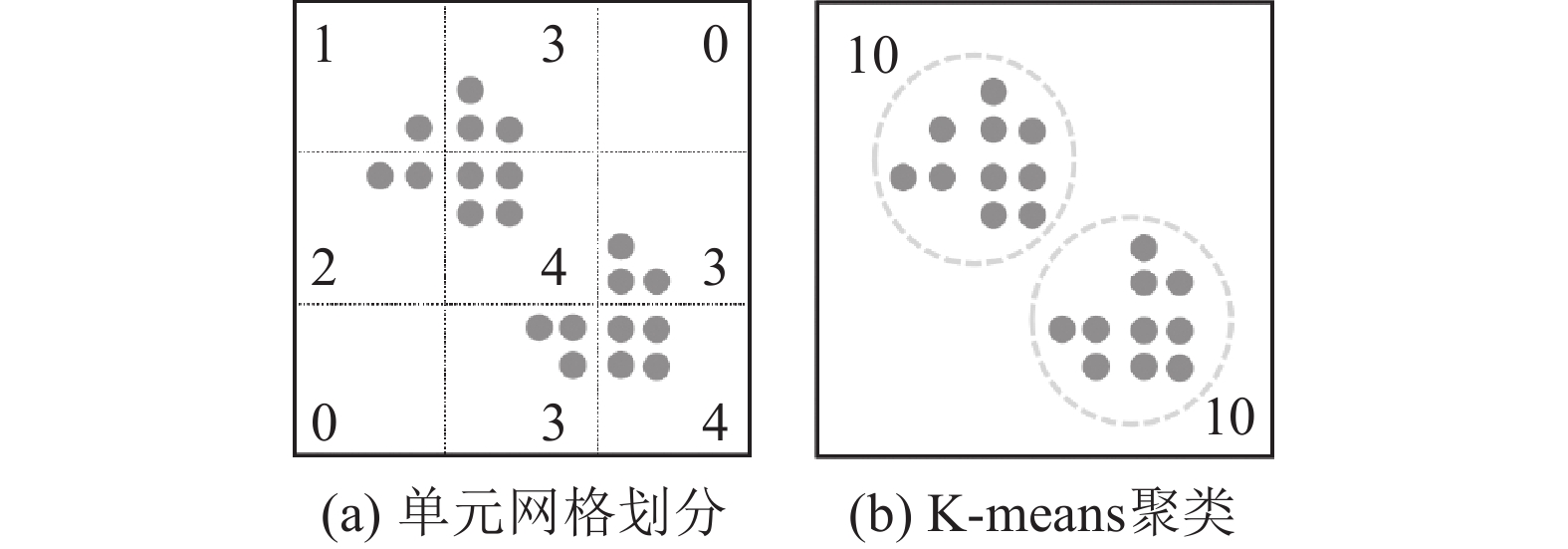
Abstract A pair-wise point cloud registration method based on normal distribution similarity was proposed to solve the problem of slow efficiency and low accuracy of existing “point-to-point” pair-wise point cloud registration algorithms. The traditional “point-to-point” registration problem was transformed to a “distribution-to-distribution” registration problem. The K-means clustering algorithm was used to generate several clusters as normal distributions to fit the original point cloud data, and then these normal distributions were used for registration, in order to reduce the calculation overhead and improve the registration efficiency. Kullback-Leibler divergence was introduced to evaluate the similarity of the nearest neighbor distributions to reduce the negative effect of non-overlapping data regions on registration in order to improve the registration accuracy. The final registration result can be obtained by using Lie algebra solver on the basis of the above steps. Eight other pair-wise point cloud registration methods were selected for comparison, including a lot of traditional “point-to-point” registration methods, in order to verify the effectiveness of the proposed method. The experimental results showed that the proposed algorithm could effectively improve the stability and accuracy of the registration tasks while keeping the computation cost low. In addition, experiments on two datasets in real scenarios further proved that the proposed algorithm had good application potential in real environment registration tasks.
|
|
Received: 09 July 2024
Published: 30 May 2025
|
|
|
| Fund: 国家自然科学基金资助项目(61972312). |
|
Corresponding Authors:
Shanmin PANG
E-mail: li159515@stu.xjtu.edu.cn;pangsm@xjtu.edu.cn
|
基于正态分布相似性的双视角点云配准方法
针对现有“点到点”双视角点云配准算法效率慢、精度低的问题,提出基于正态分布相似性的双视角点云配准方法. 将传统“点到点”配准问题转化为“分布到分布”配准问题,利用K-means聚类算法生成若干正态分布聚簇来拟合原始点云数据,再对这些正态分布聚簇进行配准,从而降低计算开销,提升配准效率;将Kullback-Leibler散度引入最近邻匹配正态分布的相似性评估,从而削弱非重叠数据区域对配准的负面影响,提升配准精度. 使用李代数求解器来获取最终的配准结果. 为了验证所提方法的有效性,选取其他8种双视角点云配准方法进行比对,其中包含多种“点到点”配准方法. 结果表明,本研究所提算法在保持较低计算开销的同时,有效提升了配准的稳定性和精确性. 在2个数据集上进行真实场景实验,证明了本研究所提算法在真实环境配准任务上拥有较好的应用潜力.
关键词:
双视角配准,
部分重叠配准,
正态分布变换,
K-means聚类算法,
Kullback-Leibler散度,
李代数求解器
|
|
| [1] |
GOJCIC Z, ZHOU C, WEGNER J D, et al. Learning multiview 3D point cloud registration [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 1759–1769.
|
|
|
| [2] |
LI P, WANG R, WANG Y, et al Evaluation of the ICP algorithm in 3D point cloud registration[J]. IEEE Access, 2020, 8: 68030- 68048
doi: 10.1109/ACCESS.2020.2986470
|
|
|
| [3] |
CHEN X, MA H, WAN J, et al. Multi-view 3D object detection network for autonomous driving [C]// IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 6526–6534.
|
|
|
| [4] |
ZHENG Y, LI Y, YANG S, et al Global-PBNet: a novel point cloud registration for autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (11): 22312- 22319
doi: 10.1109/TITS.2022.3153133
|
|
|
| [5] |
范光宇, 宫宇宸, 饶蕾, 等 基于灰度相似性的激光点云与全景影像配准[J]. 浙江大学学报: 工学版, 2022, 56 (8): 1633- 1639
FAN Guangyu, GONG Yuchen, RAO Lei, et al Registration of laser point cloud and panoramic image based on gray similarity[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (8): 1633- 1639
|
|
|
| [6] |
龚靖渝, 楼雨京, 柳奉奇, 等 三维场景点云理解与重建技术[J]. 中国图象图形学报, 2023, 28 (6): 1741- 1766
GONG Jingyu, LOU Yujing, LIU Fengqi, et al Scene point cloud understanding and reconstruction technologies in 3D space[J]. Journal of Image and Graphics, 2023, 28 (6): 1741- 1766
doi: 10.11834/jig.230004
|
|
|
| [7] |
BESL P J, MCKAY N D A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14 (2): 239- 256
doi: 10.1109/34.121791
|
|
|
| [8] |
BIBER P, STRASSER W. The normal distributions transform: a new approach to laser scan matching [C]// IEEE International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2003: 2743–2748.
|
|
|
| [9] |
CHARLES R Q, HAO S, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 77–85.
|
|
|
| [10] |
CHETVERIKOV D, SVIRKO D, STEPANOV D, et al. The trimmed iterative closest point algorithm [C]// International Conference on Pattern Recognition. Quebec City: IEEE, 2002: 545–548.
|
|
|
| [11] |
BOUAZIZ S, TAGLIASACCHI A, PAULY M Sparse iterative closest point[J]. Computer Graphics Forum, 2013, 32 (5): 113- 123
doi: 10.1111/cgf.12178
|
|
|
| [12] |
PAVLOV A L, OVCHINNIKOV G W, DERBYSHEV D Y, et al. AA-ICP: iterative closest point with Anderson acceleration [C]// IEEE International Conference on Robotics and Automation. Brisbane: IEEE, 2018: 3407–3412.
|
|
|
| [13] |
ZHANG J, YAO Y, DENG B Fast and robust iterative closest point[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44 (7): 3450- 3466
|
|
|
| [14] |
YANG J, LI H, CAMPBELL D, et al Go-ICP: a globally optimal solution to 3D ICP point-set registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38 (11): 2241- 2254
doi: 10.1109/TPAMI.2015.2513405
|
|
|
| [15] |
SHI X, LIU T, HAN X Improved iterative closest point (ICP) 3D point cloud registration algorithm based on point cloud filtering and adaptive fireworks for coarse registration[J]. International Journal of Remote Sensing, 2020, 41 (8): 3197- 3220
doi: 10.1080/01431161.2019.1701211
|
|
|
| [16] |
LI Z, WANG C, MA J, et al Point set registration via rigid transformation consensus[J]. Computers and Electrical Engineering, 2022, 101: 108098
doi: 10.1016/j.compeleceng.2022.108098
|
|
|
| [17] |
徐文菲, 金莉, 韩旭, 等 面向缺失点云配准的镜像迭代最近点算法[J]. 西安交通大学学报, 2023, 57 (7): 201- 212,220
XU Wenfei, JIN Li, HAN Xu, et al Mirrored iterative closest point algorithm for missing point cloud registration[J]. Journal of Xi’an Jiaotong University, 2023, 57 (7): 201- 212,220
doi: 10.7652/xjtuxb202307019
|
|
|
| [18] |
CHEN Y, MEDIONI G Object modelling by registration of multiple range images[J]. Image and Vision Computing, 1992, 10 (3): 145- 155
doi: 10.1016/0262-8856(92)90066-C
|
|
|
| [19] |
RUSINKIEWICZ S, LEVOY M. Efficient variants of the ICP algorithm [C]// 3rd International Conference on 3-D Digital Imaging and Modeling. Quebec City: IEEE, 2001: 145–152.
|
|
|
| [20] |
RUSINKIEWICZ S A symmetric objective function for ICP[J]. ACM Transactions on Graphics, 2019, 38 (4): 1- 7
|
|
|
| [21] |
LI J, HU Q, ZHANG Y, et al Robust symmetric iterative closest point[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 185: 219- 231
doi: 10.1016/j.isprsjprs.2022.01.019
|
|
|
| [22] |
MAGNUSSON M, LILIENTHAL A, DUCKETT T Scan registration for autonomous mining vehicles using 3D-NDT[J]. Journal of Field Robotics, 2007, 24 (10): 803- 827
doi: 10.1002/rob.20204
|
|
|
| [23] |
STOYANOV T, MAGNUSSON M, LILIENTHAL A J. Point set registration through minimization of the L2 distance between 3D-NDT models [C]// IEEE International Conference on Robotics and Automation. Saint Paul: IEEE, 2012: 5196–5201.
|
|
|
| [24] |
AOKI Y, GOFORTH H, SRIVATSAN R A, et al. PointNetLK: robust and efficient point cloud registration using PointNet [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 7156–7165.
|
|
|
| [25] |
WANG Y, SOLOMON J. Deep closest point: learning representations for point cloud registration [C]// IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 3522–3531.
|
|
|
| [26] |
WANG Y, SUN Y, LIU Z, et al Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38 (5): 1- 12
|
|
|
| [27] |
YUAN W, ECKART B, KIM K, et al. DeepGMR: learning latent Gaussian mixture models for registration [C]// European Conference on Computer Vision. Glasgow: Springer, 2020: 733–750.
|
|
|
| [28] |
XU H, LIU S, WANG G, et al. OMNet: learning overlapping mask for partial-to-partial point cloud registration [C]// IEEE/CVF International Conference on Computer Vision. Montreal: IEEE, 2021: 3112–3121.
|
|
|
| [29] |
MEI G, TANG H, HUANG X, et al. Unsupervised deep probabilistic approach for partial point cloud registration [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 13611–13620.
|
|
|
| [30] |
ZHU J, JIANG Z, EVANGELIDIS G D, et al Efficient registration of multi-view point sets by K-means clustering[J]. Information Sciences, 2019, 488: 205- 218
doi: 10.1016/j.ins.2019.03.024
|
|
|
| [31] |
ZHU J, MU J, YAN C B, et al 3DMNDT: 3D multi-view registration method based on the normal distributions transform[J]. IEEE Transactions on Automation Science and Engineering, 2024, 21 (1): 488- 501
doi: 10.1109/TASE.2022.3225679
|
|
|
| [32] |
Stanford University. The Stanford 3D scanning repository [EB/OL]. (2014-08-19) [2021-10-01]. https://graphics.stanford.edu/data/3Dscanrep/.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|