|
|
|
| Threat number design for steering collision avoidance at extreme conditions |
Zi-wen HUANG1( ),Li LI1,Bing ZHOU1,*(),Xiao-jian WU2,Tian CHAI1,Yan XU1 ),Li LI1,Bing ZHOU1,*(),Xiao-jian WU2,Tian CHAI1,Yan XU1 |
1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha 410082, China
2. School of Advanced Manufacturing, Nanchang University, Nanchang 330031, China |
|
|
|
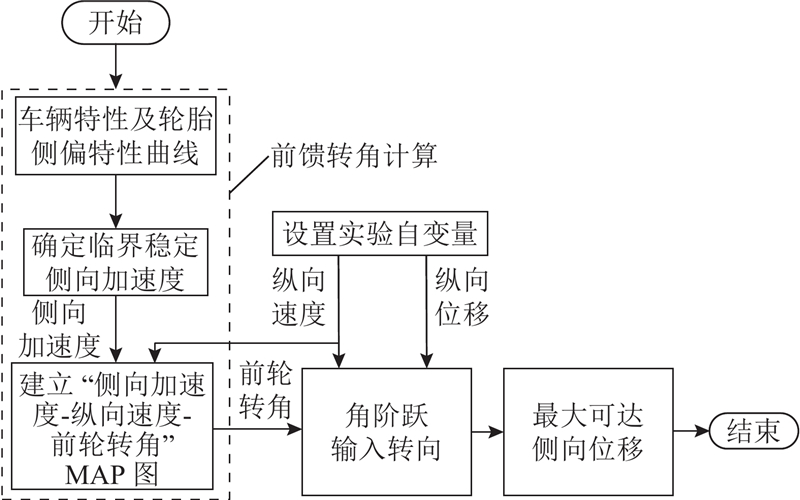
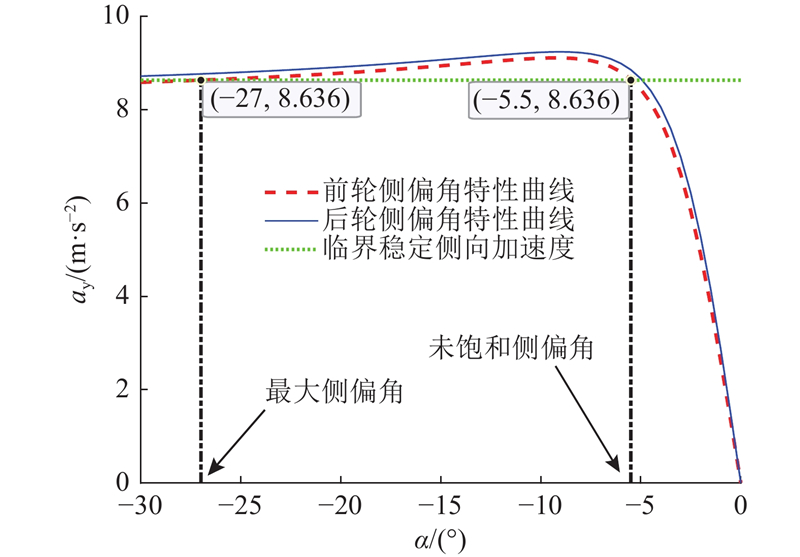
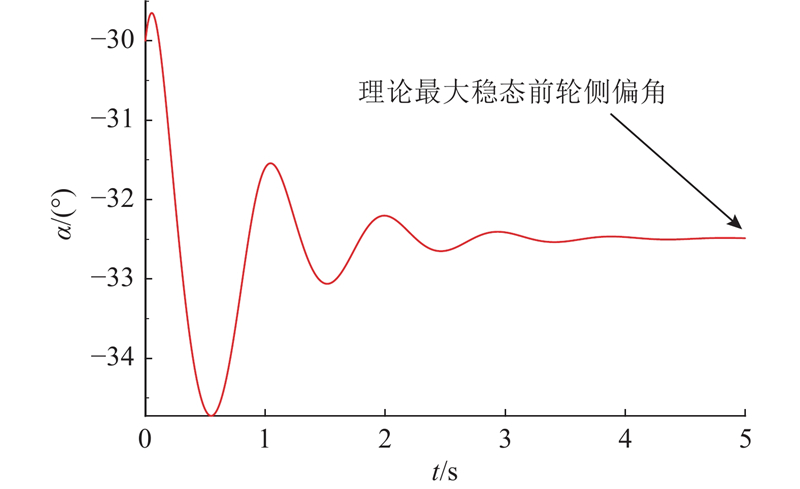
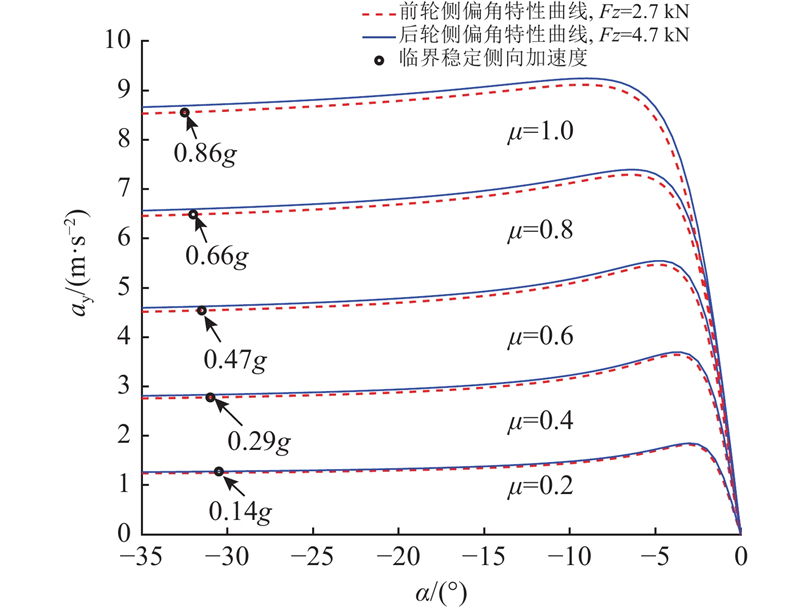
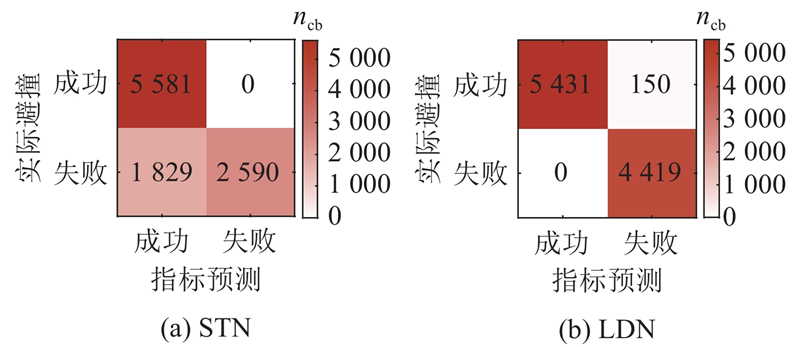
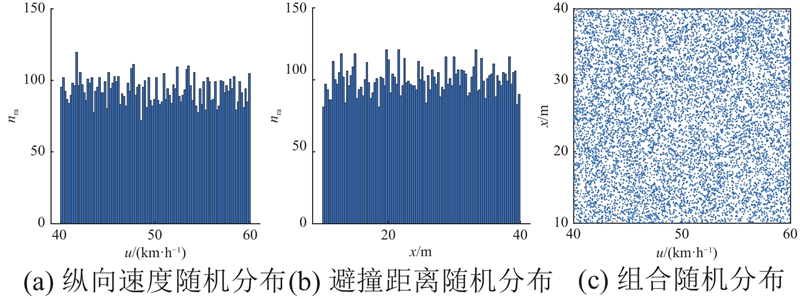
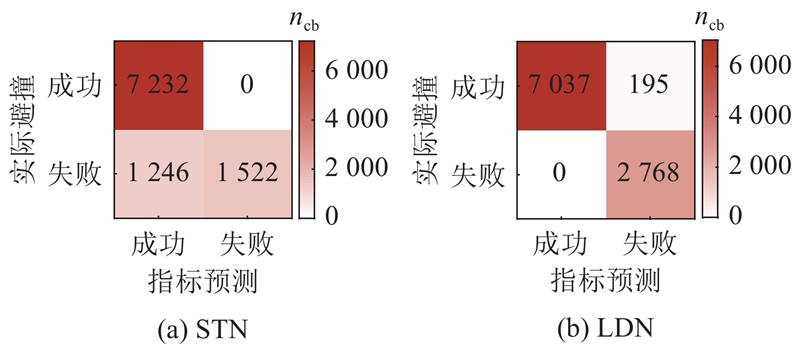
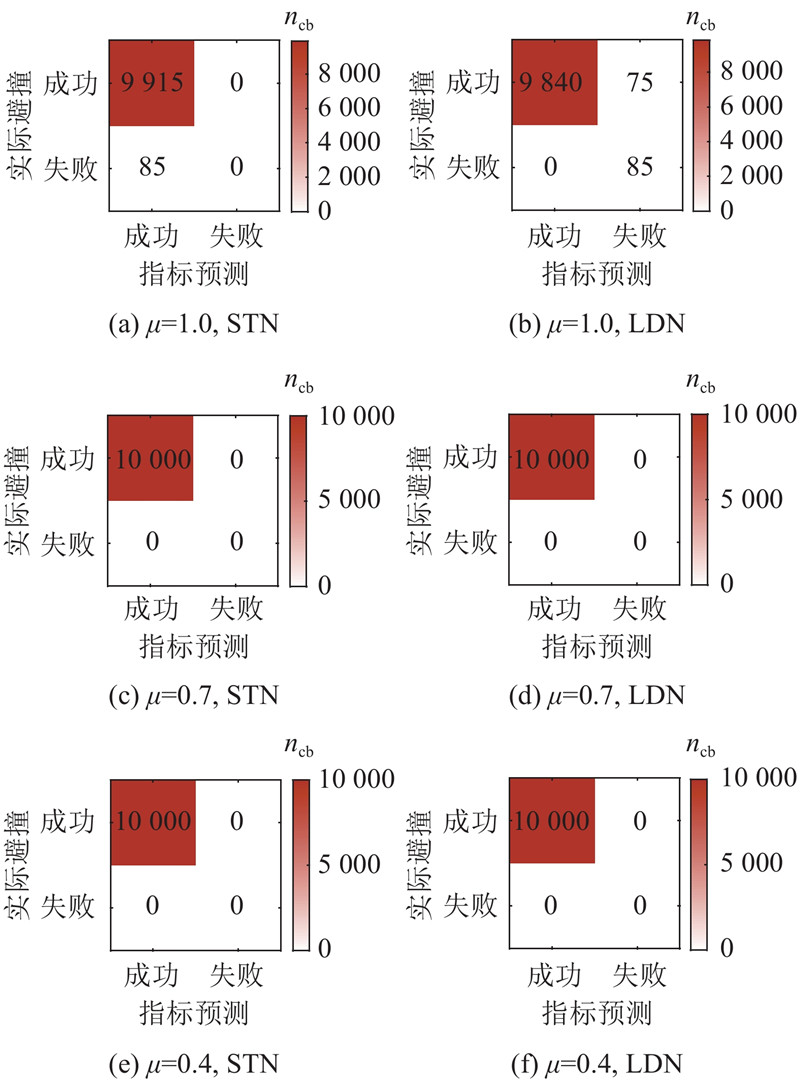
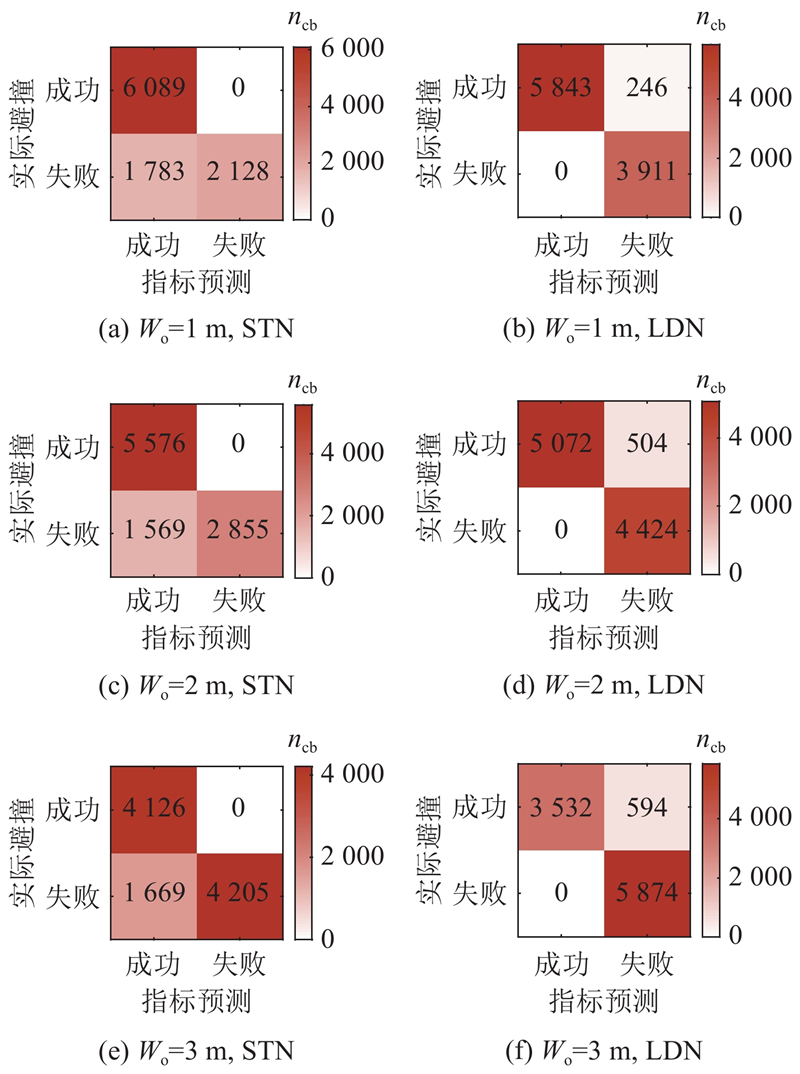
Abstract The steady lateral acceleration based on road adhesion is usually denoted as the steer threat number, neglecting the limitation of vehicle characteristics on vehicle steering capability as well as the nonlinear and transient characteristics of high-speed steering maneuvers. To solve the issue, it is proposed to simulate the steering collision avoidance process by the steering wheel step test to obtain the maximum steady achievable lateral displacement as the steering threat number. Firstly, the critical stable lateral acceleration of the vehicle was determined by analyzing the tire lateral deflection and the vehicle characteristics. Secondly, the MAP of “lateral acceleration-longitudinal velocity-front wheel angle” was established according to the feedforward control algorithm. Thirdly, a steering feedforward control method considering lateral load transfer was proposed to improve the accuracy of the feed-forward front wheel angle in the steering wheel step input test. Finally, the stepping steering conditions under critical stability of the vehicle were established according to the MAP, and the nonlinear two-degree-of-freedom vehicle model was used for stepping steering simulation to obtain the maximum steady achievable lateral displacement plots. The proposed threat number and the steer threat number (STN) were compared and validated by the Monte Carlo method. The simulation results show that the proposed threat number can be more accurate in determining whether the vehicle can avoid collision by steering under extreme conditions compared to STN.
|
|
Received: 24 February 2023
Published: 27 December 2023
|
|
|
| Fund: 国家自然科学基金资助项目(52002163, 51875184, 52062036) |
|
Corresponding Authors:
Bing ZHOU
E-mail: 2441520765@qq.com;zhou_bingo@163.com
|
极限工况下的车辆转向避撞风险指数
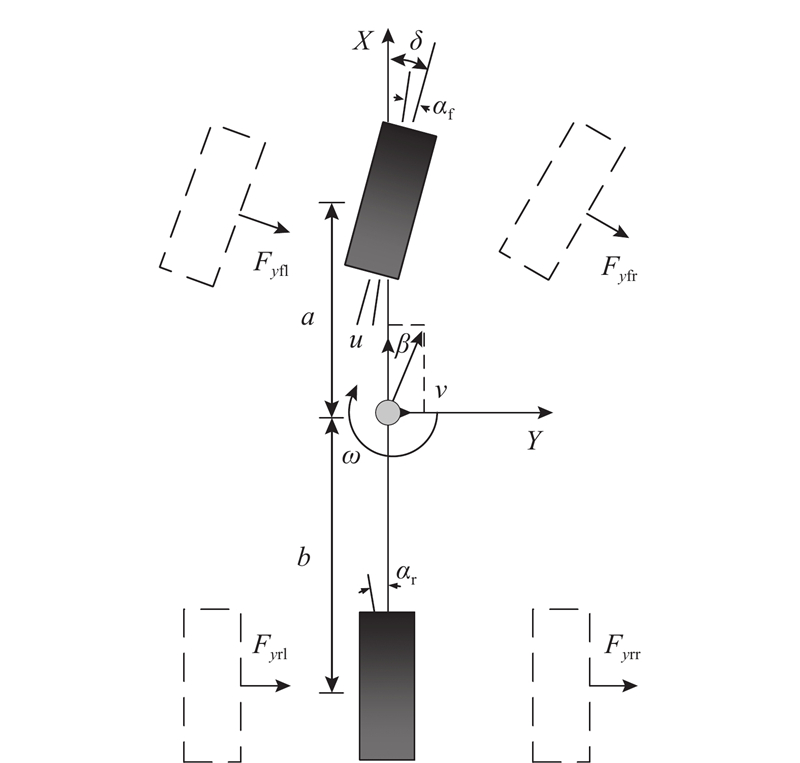
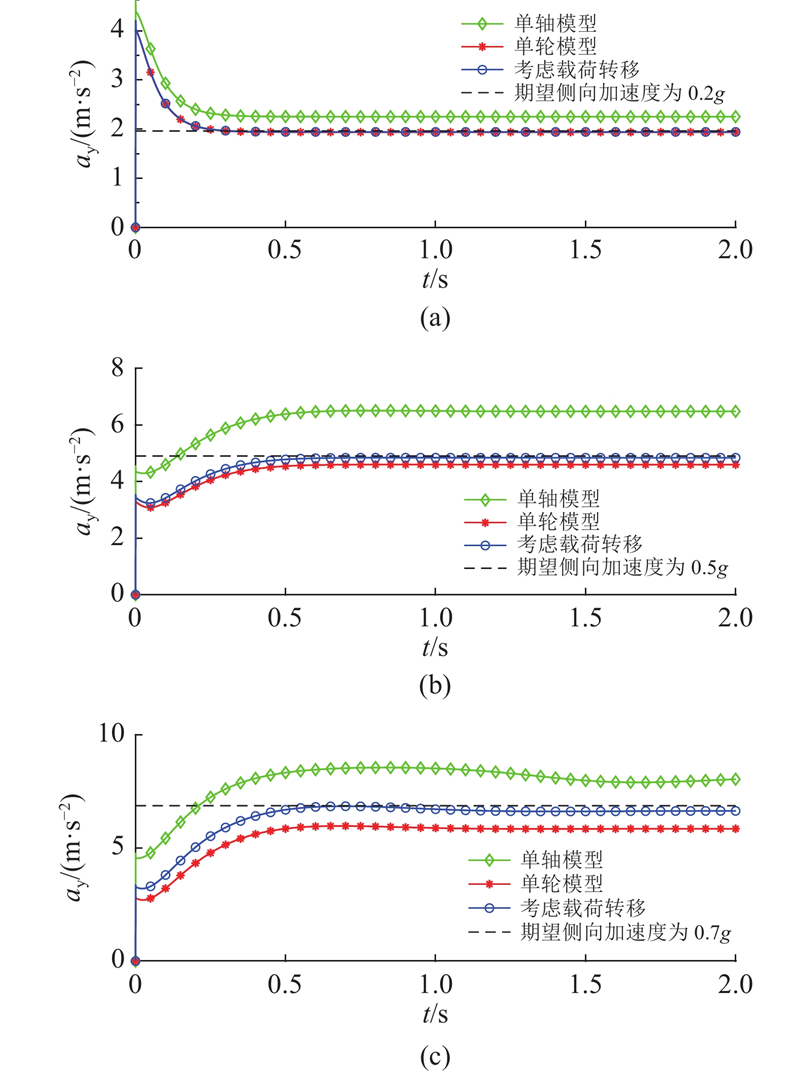
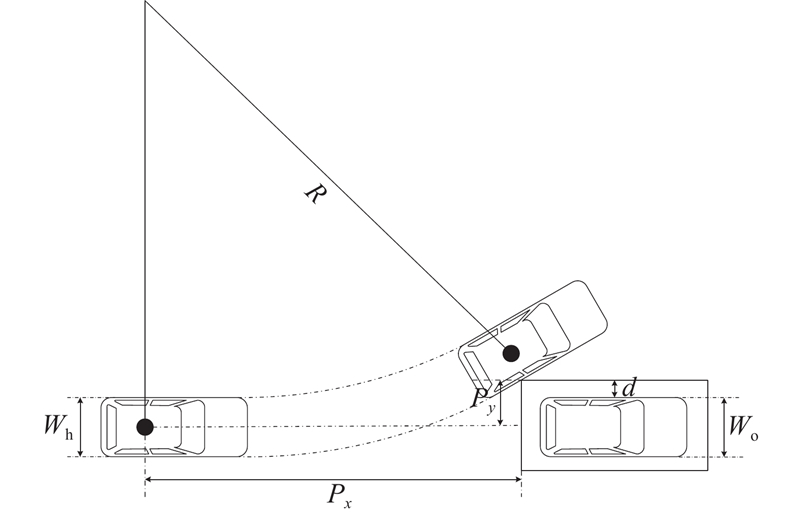
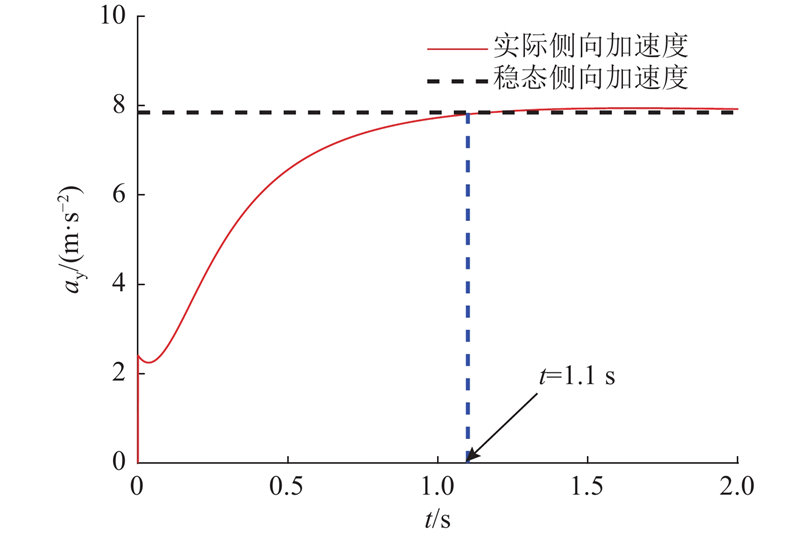
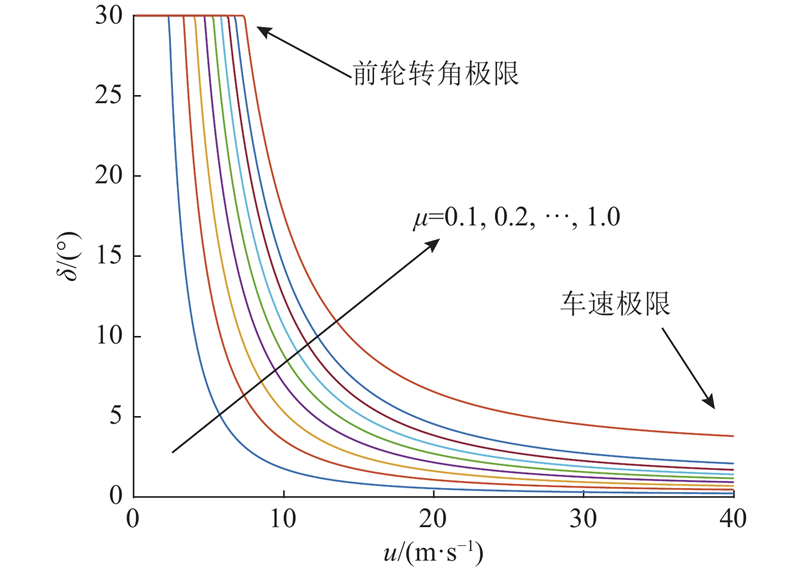
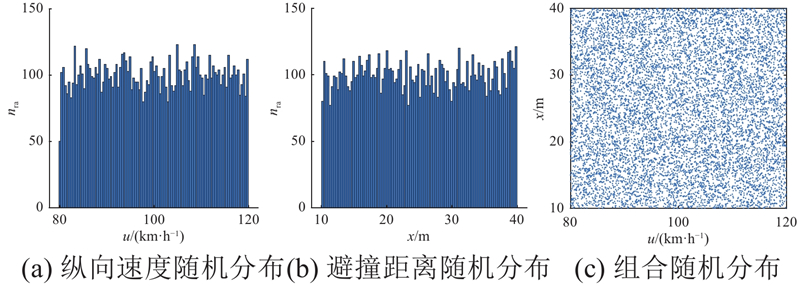
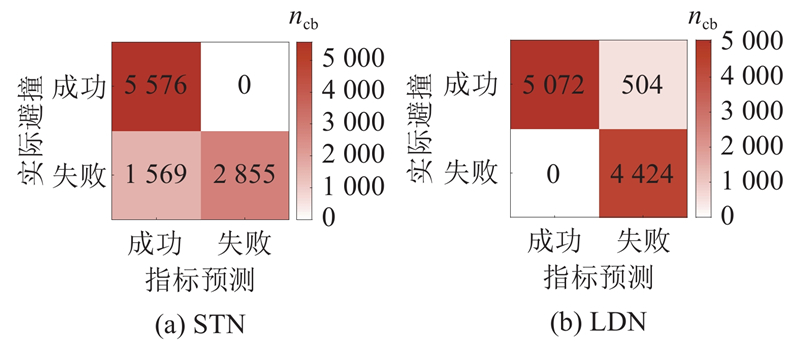
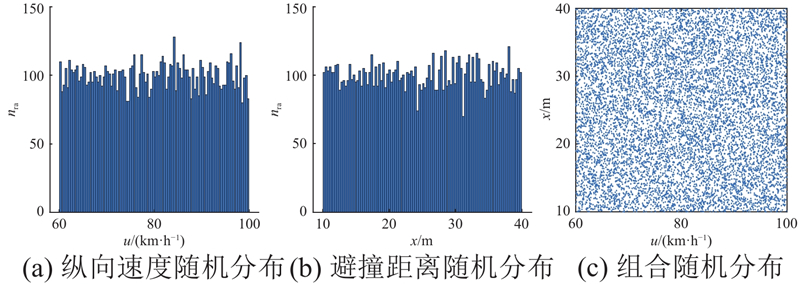
转向避撞风险指数通常根据路面附着限制以稳态侧向加速度进行车辆转向避撞能力评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程的非线性和瞬态特性,对此,提出通过前轮转角阶跃实验模拟转向避撞过程直接获得车辆最大可达侧向位移作为转向风险指数. 分析轮胎侧偏特性曲线和车辆特性,确定车辆的临界稳定侧向加速度;根据前馈控制算法建立“侧向加速度?纵向速度?前轮转角”MAP;提出考虑横向载荷转移的转向前馈控制方法,以提高车辆进行阶跃转向实验时的前馈前轮转角精度;根据MAP建立车辆临界稳定的角阶跃转向工况,采用非线性二自由度车辆模型进行阶跃转向仿真,得到车辆的最大可达侧向位移图. 通过蒙特卡洛法对提出的风险指数和转向风险指数(STN)进行对比、验证. 仿真结果表明,相比STN,所提转向风险指数在车辆极限工况可以更准确地判断车辆能否通过转向完成避撞.
关键词:
极限工况,
转向避撞,
转向风险指数,
转向前馈控制,
蒙特卡洛法
|
|
| [12] |
杨秀建. 极限工况下汽车转向失稳的非线性动力学特性与主动控制研究[D]. 济南: 山东大学, 2009.
YANG Xiu-jian. Research on the nonlinear dynamics and active control for vehicle cornering destabilization in critical situations [D]. Jinan: Shandong University, 2009.
|
|
|
| [13] |
PACEJKA H B. Tyre and vehicle dynamics [M]. [S.l.]: Elsevier, 2006.
|
|
|
| [14] |
李小雨. 复合工况下分布式驱动电动汽车失稳机理及操纵稳定性控制研究[D]. 长春: 吉林大学, 2020.
LI Xiao-yun. Research on instability mechanism and handling stability control of distributed drive electric vehicles under combined slip condition [D]. Changchun: Jilin University, 2020.
|
|
|
| [15] |
GAO Y, GORDON T, LIDBERG M Optimal control of brakes and steering for autonomous collision avoidance using modified Hamiltonian algorithm[J]. International Journal of Vehicle Mechanics and Mobility, 2019, 57 (8): 1224- 1240
|
|
|
| [16] |
MATSUBAYASHI K, YAMAD Y, IYODA M, et al. Development of rear pre-crash safety system for rear-end collisions [C]// 20th International Technical Conference on the Enhanced Safety of Vehicles. Lyon: [s.n.], 2007.
|
|
|
| [17] |
GIUGIANNI M. The science of vehicle dynamics: handling, braking, and ride of road and race cars [M]. [S.l.]: Springer, 2014.
|
|
|
| [18] |
HAMMERSLEY J. Monte carlo methods [M]. [S.l.]: Springer, 2013.
|
|
|
| [19] |
FENG S, FENG Y, YU C, et al Testing scenario library generation for connected and automated vehicles, part I: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22 (3): 1573- 1582
doi: 10.1109/TITS.2020.2972211
|
|
|
| [1] |
PICCININI G B, ENGSTRÖM J, BÄRGMAN J, et al Factors contributing to commercial vehicle rear-end conflicts in China: a study using on-board event data recorders[J]. Journal of Safety Research, 2017, 62: 143- 153
doi: 10.1016/j.jsr.2017.06.004
|
|
|
| [2] |
崔庆佳. 面向高速紧急工况的车辆避撞多目标协调控制研究[D]. 长沙: 湖南大学, 2020.
CUI Qing-jia. Research on multi-objective coordinated control strategies for vehicle collision-avoidance in highway driving [D]. Changsha: Hunan University, 2020.
|
|
|
| [3] |
SHAH J, BEST M, BENMIMOUN A, et al Autonomous rear-end collision avoidance using an electric power steering system[J]. Journal of Automobile Engineering, 2015, 229 (12): 1638- 1655
doi: 10.1177/0954407014567517
|
|
|
| [4] |
JANSSON J. Collision avoidance theory: with application to automotive collision mitigation [D]. Linköping: Linköping University, 2005.
|
|
|
| [5] |
KAPANIA N R, GERDES J C Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling[J]. International Journal of Vehicle Mechanics and Mobility, 2015, 53 (12): 1687- 1704
|
|
|
| [6] |
CUI Q, DING R, WU X, et al A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving[J]. International Journal of Vehicle Mechanics and Mobility, 2020, 58 (6): 955- 986
|
|
|
| [7] |
来飞, 叶心. 汽车高速行驶时自动紧急转向避撞的前馈与反馈跟踪控制的研究[J]. 汽车工程, 2020, 42(10): 1404-1411.
LAI Fei, YE Xin. Research on feedforward and feedback tracking control for automatic emergency steering collision avoidance in vehicle high-speed driving [J] Automotive Engineering, 2020, 42(10): 1404-1411.
|
|
|
| [8] |
BRANNSTROM M, SJOBERG J, COELINGH E. A situation and threat assessment algorithm for a rear-end collision avoidance system [C]// IEEE Intelligent Vehicles Symposium. Eindhoven: IEEE, 2008: 102-107.
|
|
|
| [9] |
NILSSON J, ÖDBLOM A C E, FREDRIKSSON J Worst-case analysis of automotive collision avoidance systems[J]. IEEE Transactions on Vehicular Technology, 2015, 65 (4): 1899- 1911
|
|
|
| [10] |
HOSSEINI S, MURGOVSKI N, DE CAMPOS G R, et al. Adaptive forward collision warning algorithm for automotive applications [C]// 2016 American Control Conference. Boston: 2016: 5982-5987.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|