1. Ocean College, Zhejiang University, Zhoushan 316021, China 2. The Engineering Research Center of Oceanic Sensing Technology and Equipment, Ministry of Education, Zhejiang University, Zhoushan 316021, China
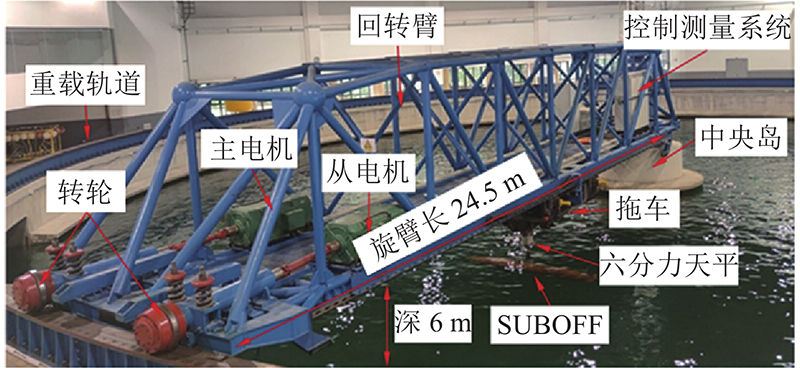
A submarine manoeuvring turning test was conducted in a rotating arm basin at Zhejiang University by using the standard model SUBOFF AFF-8 as a test object in order to analyze the hydrodynamic characteristics and force motion of underwater vehicles in steady turn. The test technology of rotating arm test was introduced, including model installation, data measurement and calibration and verification of six component balance. The rotation derivatives of the horizontal and vertical planes were obtained and compared with the experimental values of the Taylor tank. Results showed that the error between Zhejiang University basin and Taylor tank was less than 10%, which proved the reliability of measurements for submarine maneuverability with Zhejiang University’s basin. The change curves of longitudinal force and transverse force with drift angle were symmetrical to the left and right with 0° drift angle as the dividing point when moving on the horizontal plane. The roll moment and yaw moment increased with the increase of drift angle. The vertical force and pitch moment were similar to parabola distribution with the change of drift angle. The forces and moments of the upward and downward movements were symmetrically distributed when moving on the vertical plane. The larger the angular velocity was, the larger the longitudinal force was. The force difference at different angles of attack was larger at higher angular velocities.
Bo-wen ZHAO,Ying-ying YUN,Ji-yuan SUN,Zhi-guo YANG,Bin HUANG. Study on rotating arm test of fully appended submarine and forces in single-plane. Journal of ZheJiang University (Engineering Science), 2023, 57(4): 773-783.
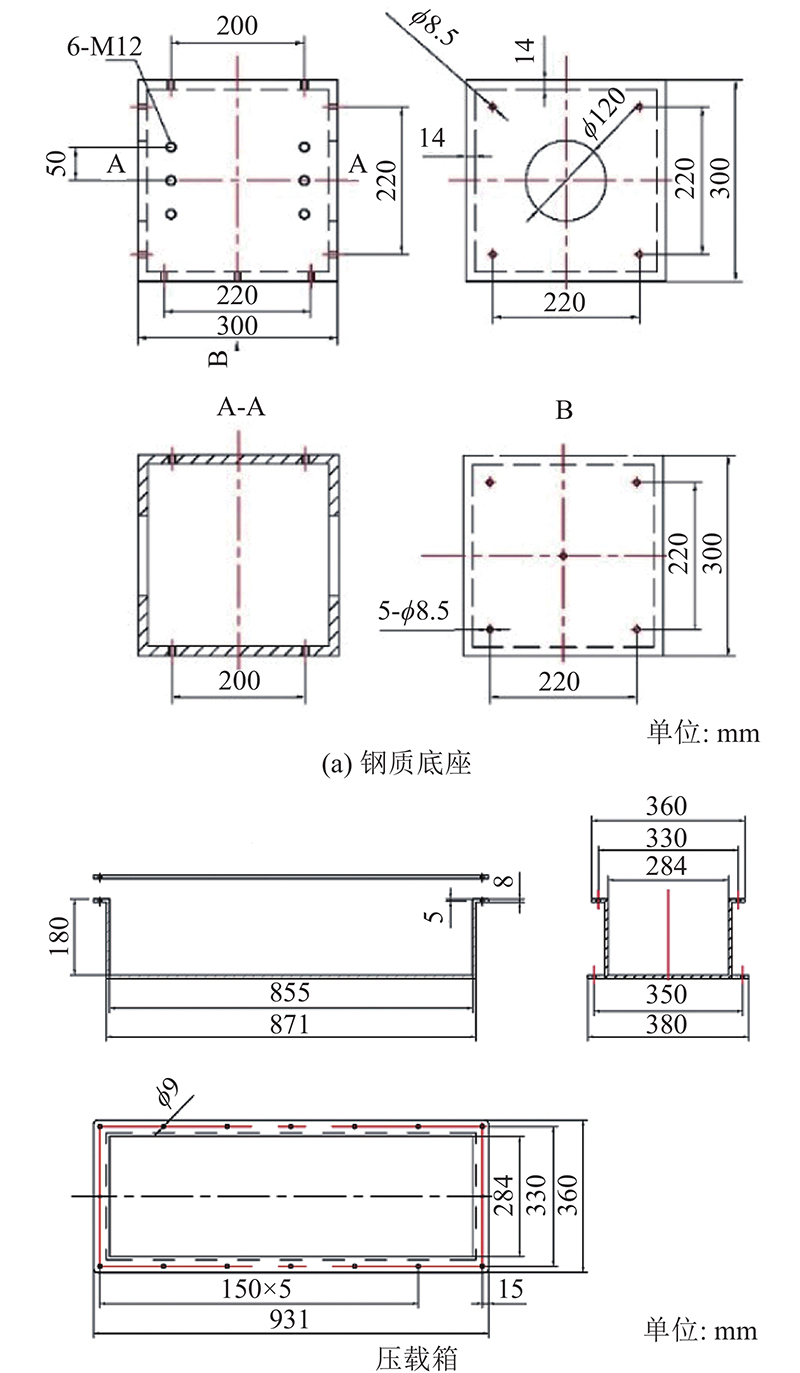
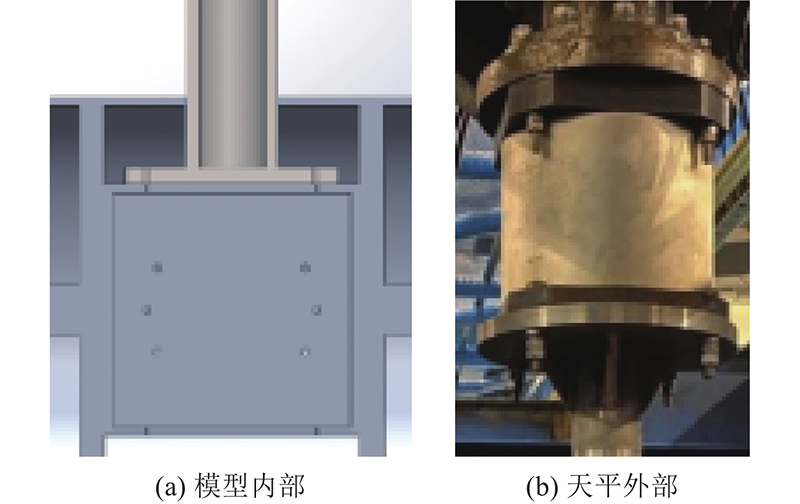
Fig.5Installation mode of strut, model and balance
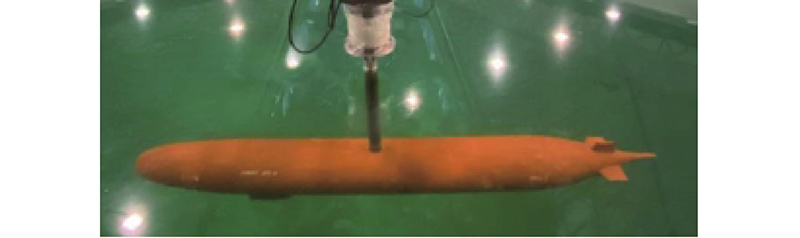
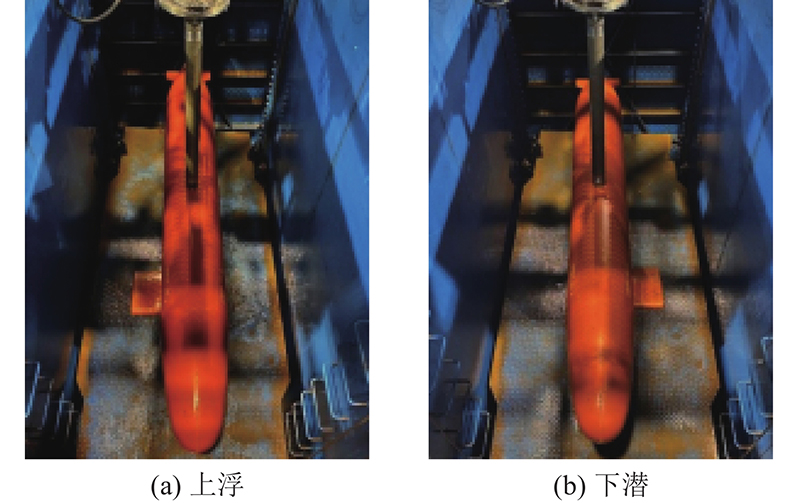
Fig.6Horizontal inverted installation
Fig.7Installation form of vertical side mounting
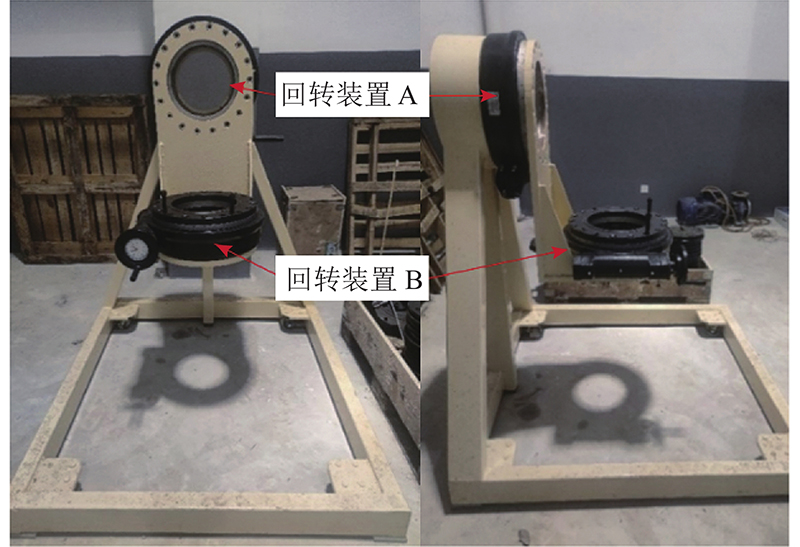
Fig.8Calibration instrument of six-component balance
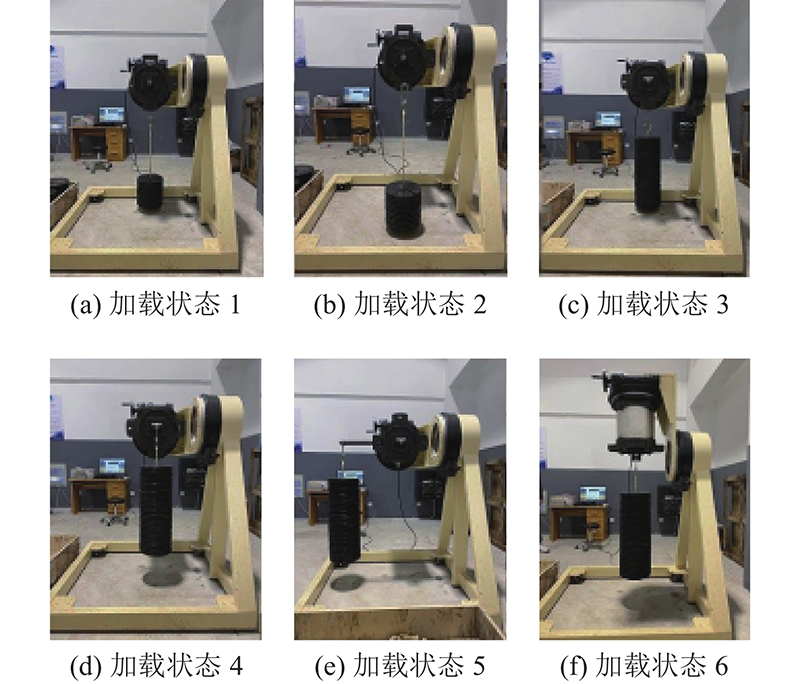
Fig.9Six loading conditions for calibrating coefficient matrix
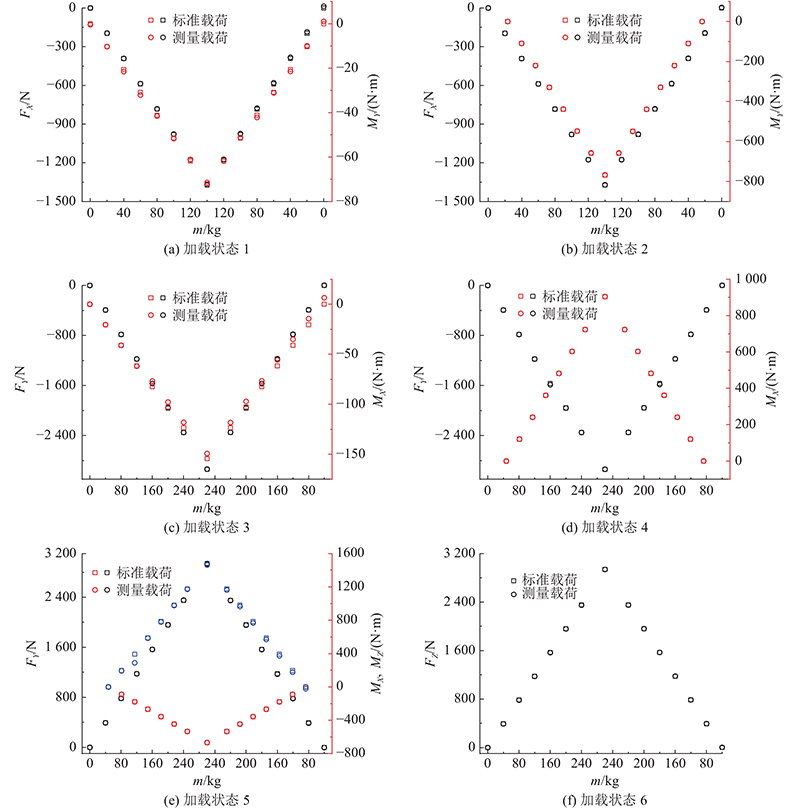
Fig.10Verification results of coefficient matrix
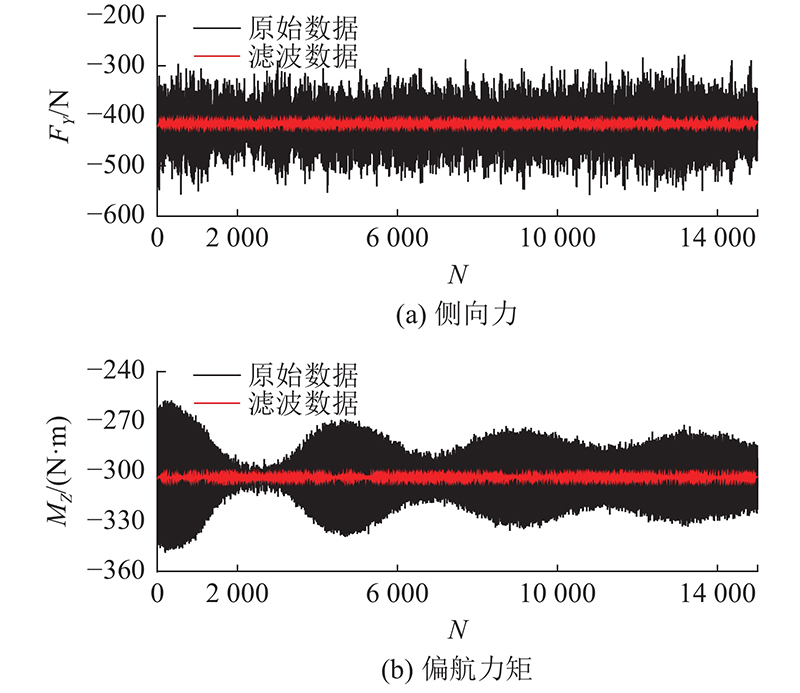
Fig.11Force and moment on horizontal plane with radius of 16 m
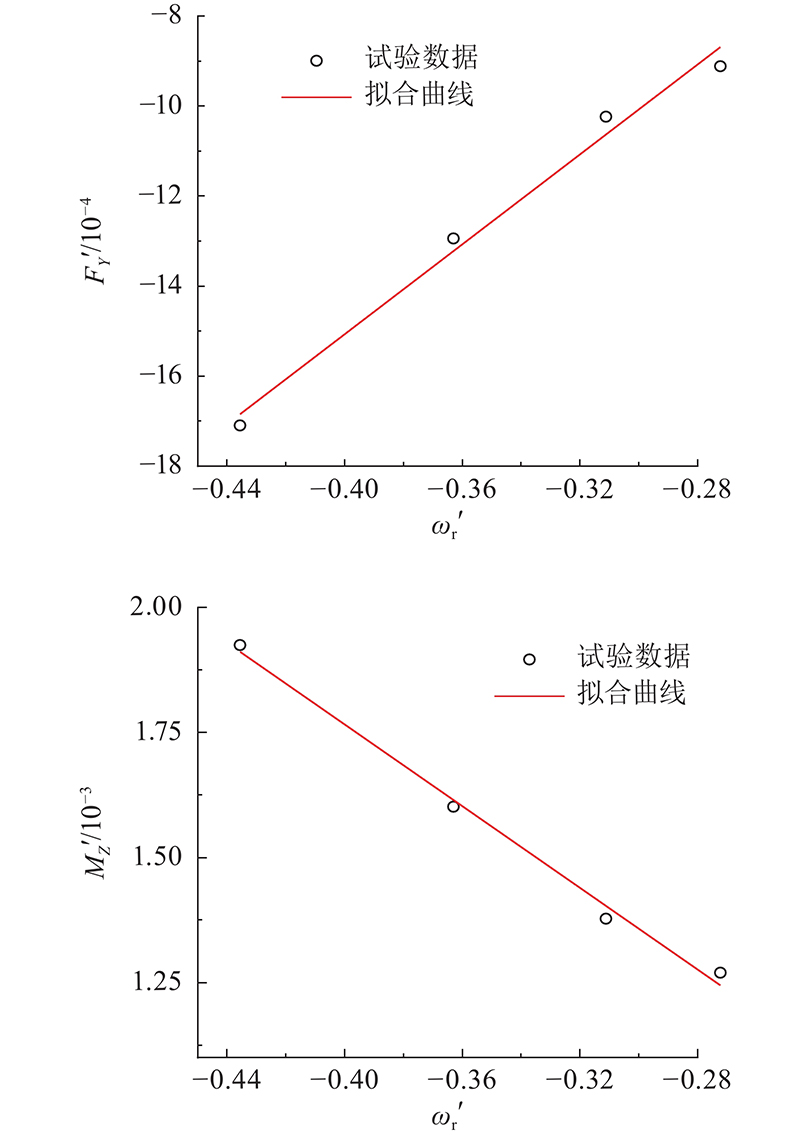
Fig.12Dimensionless lateral force and yaw moment on horizontal plane
水池
$ {Y}_{{\rm{r}}}^{\mathrm{{'}}} $
$ {N}_{{\rm{r}}}^{\mathrm{{'}}} $
浙大水池
0.004 99
?0.004 08
泰勒水池
0.005 25
?0.004 44
误差/%
4.97
8.11
Tab.2Rotational derivatives of horizontal plane
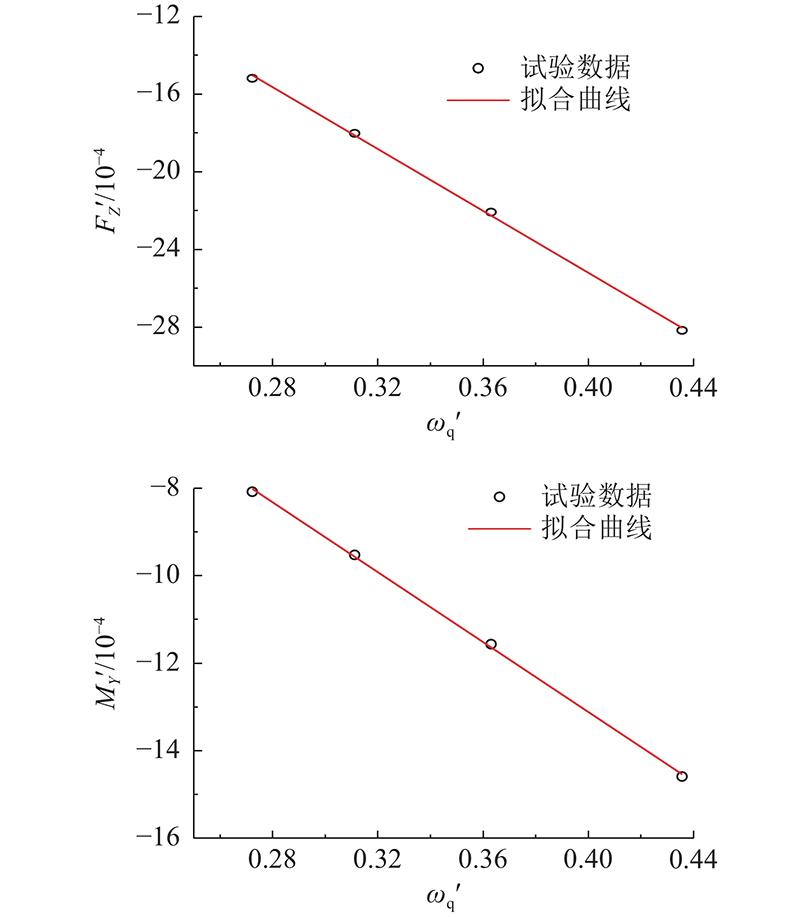
Fig.13Dimensionless vertical force and pitch moment of upward floating on vertical plane
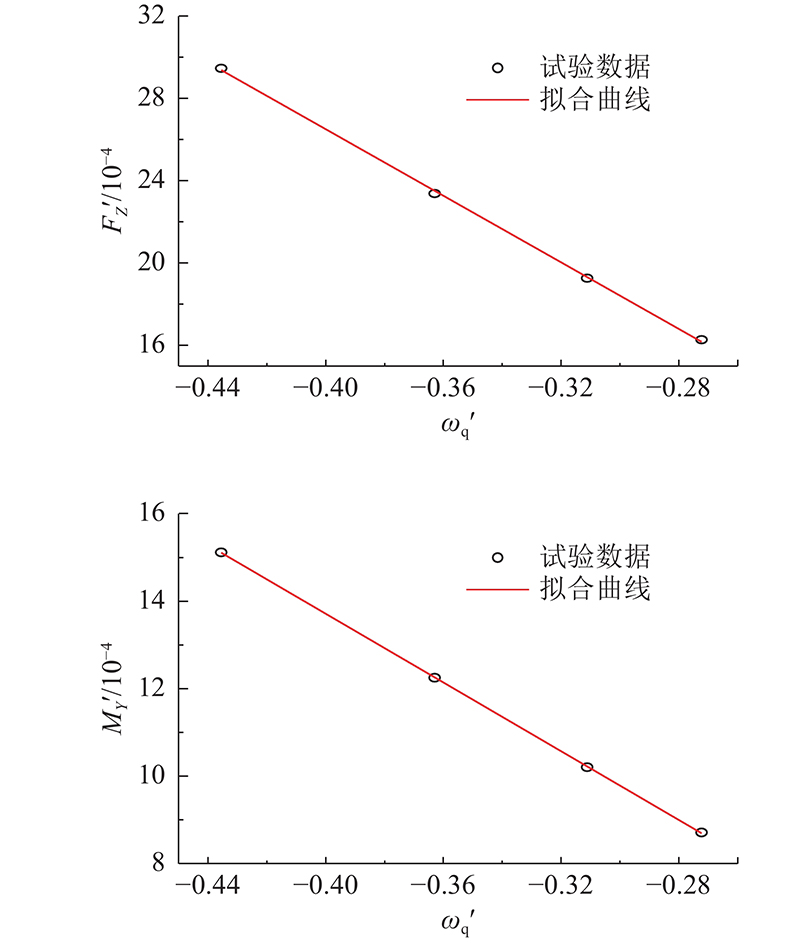
Fig.14Dimensionless vertical force and pitch moment of diving on vertical plane
垂直面
$ {Z}_{{\rm{q}}}^{\mathrm{{'}}} $
$ {M}_{{\rm{q}}}^{\mathrm{{'}}} $
浙大水池
泰勒水池
浙大水池
泰勒水池
上浮
?0.007 96
?0.007 55
?0.003 97
?0.003 7
下潜
?0.080 80
?0.007 55
?0.003 92
?0.003 7
Tab.3Rotational derivatives of vertical plane
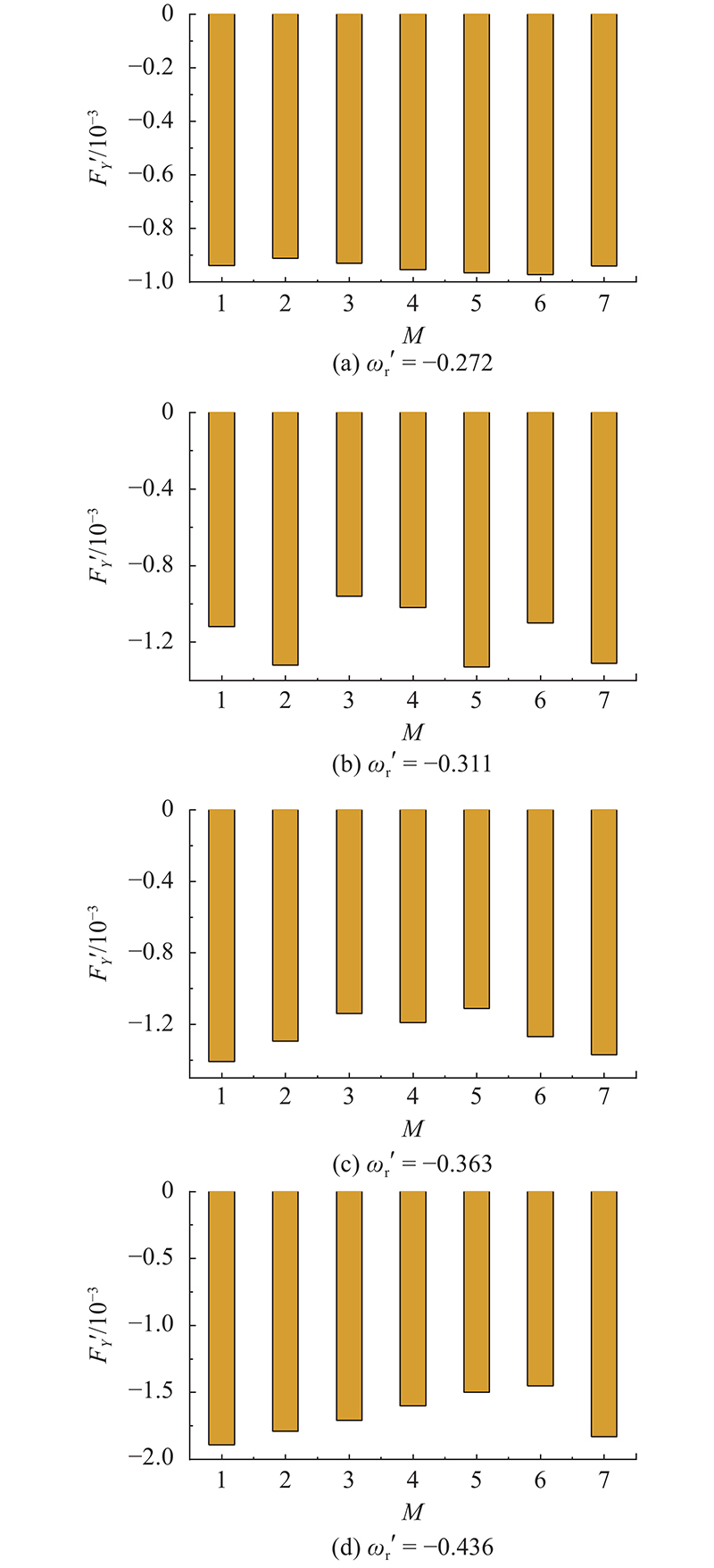
Fig.15Repeat tests under condition of 0° drift angle on horizontal plane
ωr'
SDev/10?3
P(M)/10?3
?0.272
0.021
0.015 8
?0.311
0.154
0.116 0
?0.363
0.113
0.085 7
?0.436
0.169
0.128 0
Tab.4Standard deviation and precision limit of lateral force coefficient
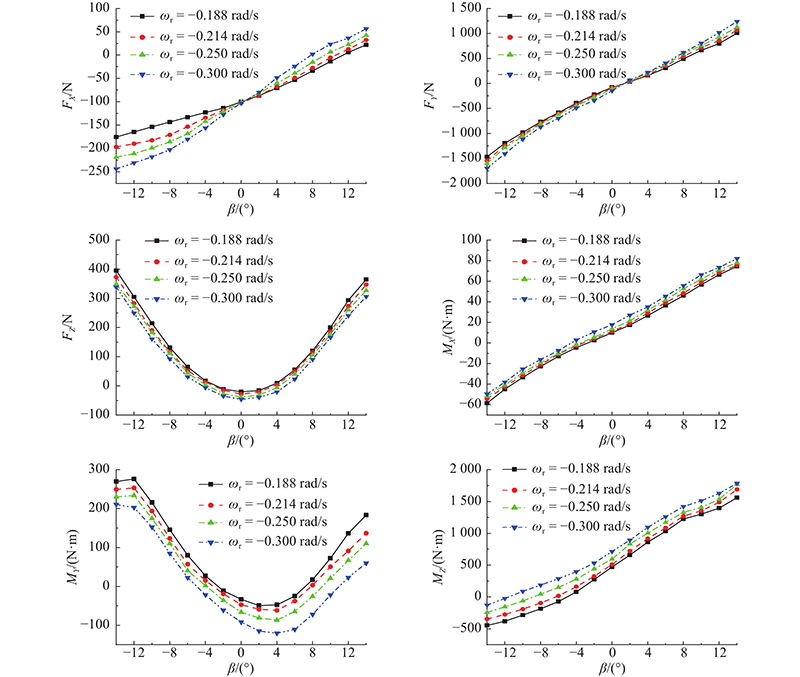
Fig.16Variation curves of forces and moments with drift angles at different angular velocities on horizontal plane
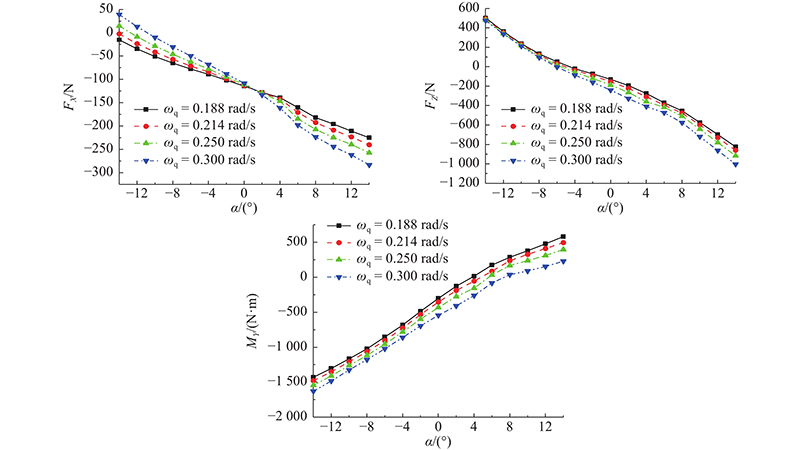
Fig.17Variation curves of forces and moment with angles of attack at different angular velocities of vertical plane floating motion
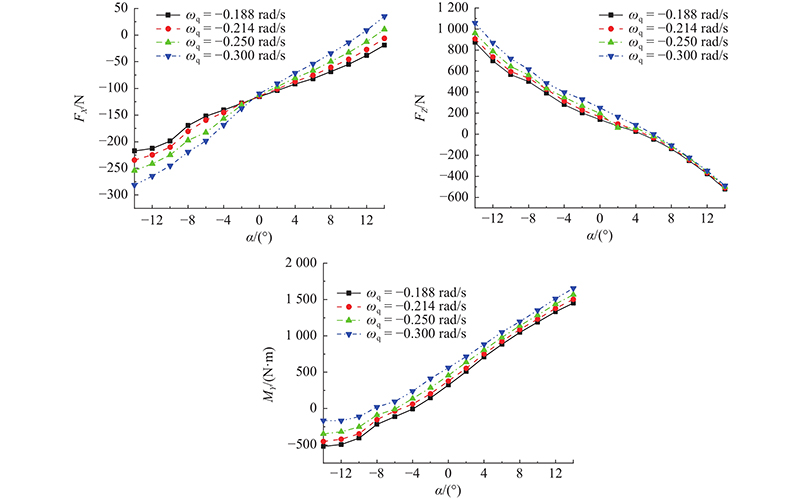
Fig.18Variation curves of forces and moment with angles of attack at different angular velocities of vertical plane diving motion
[1]
施生达. 潜艇操纵性[M]. 北京: 国防工业出版社, 1995.
[2]
詹成胜, 刘祖源, 程细得 潜艇水动力系数数值计算[J]. 船海工程, 2008, 37 (5): 1- 44 ZHAN Cheng-sheng, LIU Zu-yuan, CHENG Xi-de Numerical calculation of the submarine’s hydrodynamic coefficients[J]. Ship and Ocean Engineering, 2008, 37 (5): 1- 44
doi: 10.3963/j.issn.1671-7953.2008.03.001
[3]
邓峰, 戴余良, 陈志法, 等 基于滑移网格的潜艇旋臂试验数值模拟[J]. 指挥控制与仿真, 2016, 38 (1): 122- 126 DENG Feng, DAI Yu-liang, CHEN Zhi-fa, et al Sliding mesh based on numerical simulation of rotating arms tests for submarines[J]. Command Control and Simulation, 2016, 38 (1): 122- 126
[4]
庞永杰, 杨路春, 李宏伟, 等 潜体水动力导数的CFD计算方法研究[J]. 哈尔滨工程大学学报, 2009, 30 (8): 903- 908 PANG Yong-jie, YANG Lu-chun, LI Hong-wei, et al Approaches for predicting hydrodynamic characteristic of submarine objects[J]. Journal of Harbin Engineering University, 2009, 30 (8): 903- 908
[5]
柏铁朝, 许建, 陈炫树, 等 基于CFD的潜艇操纵性数值仿真发展综述[J]. 舰船科学技术, 2020, 42 (9): 1- 7 BAI Tie-chao, XU Jian, CHEN Xuan-shu, et al Review of development in numerical simulation of submarine maneuverability based on CFD[J]. Ship Science and Technology, 2020, 42 (9): 1- 7
doi: 10.3404/j.issn.1672-7649.2020.05.001
[6]
周广礼, 欧勇鹏, 高霄鹏, 等 潜艇操纵性预报研究现状与前景展望[J]. 中国造船, 2018, 59 (3): 203- 214 ZHOU Guang-li, OU Yong-peng, GAO Xiao-peng, et al Progress and prospect of maneuverability prediction for submarine[J]. Shipbuilding of China, 2018, 59 (3): 203- 214
[7]
张风丽 潜艇操纵性水动力系数预报方法研究[J]. 中国水运(下半月), 2018, 18 (1): 13- 15 ZHANG Feng-li Research on prediction method of submarine maneuverability hydrodynamic coefficient[J]. China Water Transport, 2018, 18 (1): 13- 15
[8]
SAEIDINEZHAD A, DEHGHAN A A, MANSHADI M D Experimental investigation of hydrodynamic characteristics of a submersible vehicle model with a non-axisymmetric nose in pitch maneuver[J]. Ocean Engineering, 2015, 100: 26- 34
doi: 10.1016/j.oceaneng.2015.03.010
[9]
FUREBY C, ANDERSON B, CLARKE D, et al Experimental and numerical study of a generic conventional submarine at 10 yaw[J]. Ocean Engineering, 2016, 116: 1- 20
doi: 10.1016/j.oceaneng.2016.01.001
[10]
YI R, HU Z, LIN Y, et al. Maneuverability design and analysis of an autonomous underwater vehicle for deep-sea hydrothermal plume survey [C]// 2013 OCEANS-San Diego. [S. l. ]: IEEE, 2013: 1-5.
[11]
ASHOK A, VAN B T, SMITS A J The structure of the wake generated by a submarine model in yaw[J]. Experiments in Fluids, 2015, 56 (6): 1- 9
[12]
MANSOORZADEH S, JAVANMARD E An investigation of free surface effects on drag and lift coefficients of an autonomous underwater vehicle (AUV) using computational and experimental fluid dynamics methods[J]. Journal of Fluids and Structures, 2014, 51: 161- 171
doi: 10.1016/j.jfluidstructs.2014.09.001
[13]
LIN Y H, TSENG S H, CHEN Y H The experimental study on maneuvering derivatives of a submerged body SUBOFF by implementing the planar motion mechanism tests[J]. Ocean Engineering, 2018, 170: 120- 135
doi: 10.1016/j.oceaneng.2018.10.015
[14]
LIN Y H, CHIU Y C The estimation of hydrodynamic coefficients of an autonomous underwater vehicle by comparing a dynamic mesh model with a horizontal planar motion mechanism experiment[J]. Ocean Engineering, 2022, 249: 110847
doi: 10.1016/j.oceaneng.2022.110847
[15]
赵金鑫. 某潜器水动力性能计算及运动仿真[D]. 哈尔滨: 哈尔滨工程大学, 2011. ZHAO Jin-xin. The hydrodynamic performance calculation and motion simulation of an AUV with appendages [D]. Harbin: Harbin Engineering University, 2011.
[16]
李刚. 穿梭潜器水动力特性的数值模拟和试验研究[D]. 哈尔滨: 哈尔滨工程大学, 2011. LI Gang. Numerical and experimental research on hydrodynamic characters of shuttle submersible [D]. Harbin: Harbin Engineering University, 2011.
[17]
庞永杰, 王庆云, 李伟坡 螺旋桨及其运行对潜艇操纵性水动力影响的模型试验研究[J]. 哈尔滨工程大学学报, 2017, 38 (1): 109- 114 PANG Yong-jie, WANG Qing-yun, LI Wei-po Model test study of influence of propeller and its rotation on hydrodynamics of submarine maneuverability[J]. Journal of Harbin Engineering University, 2017, 38 (1): 109- 114
[18]
ATSAVAPRABEE T C, HESS D E. PIV measurements of the cross-flow wave of a turning submarine model (ONR BODY-1) part 1: experimental setup [R]. Bethesda Maryland: Naval Surface Warfare Center, 2002.
[19]
ETEBARI A, ATSAVAPRANEE P, CARNEAL J B, et al. Experimental measurements on a SUBOFF model in a turning maneuver [C]// 27th Symposium on Naval Hydrodynamics. Seoul: [s. n.], 2008.
[20]
GROVES N C, HUANG T T, CHANG M S. Geometric characteristics of DARPA suboff models: (DTRC Model Nos. 5470 and 5471) [R]. Bethesda Maryland: David Taylor Research Center, 1989.
[21]
RODDY R F. Investigation of the stability and control characteristics of several configurations of the DARPA SUBOFF model (DTRC Model 5470) from captive-model experiments [R]. Bethesda Maryland: David Taylor Research Centre, 1990.
[22]
PRESS W H, TEUKOLSKY S A Savitzky-Golay smoothing filters[J]. Computers in Physics, 1990, 4 (6): 669- 672
doi: 10.1063/1.4822961
[23]
LIU H L, HUANG T T. Summary of DARPA SUBOFF experimental program data [R]. Bethesda MD: Naval Surface Warfare Center Carderock DIV Bethesda MD Hydromechanics Directorate, 1998.
[24]
朱德祥, 张志荣, 吴乘胜, 等 船舶CFD不确定度分析及ITTC临时规程的初步应用[J]. 水动力学研究与进展A辑, 2007, 22 (3): 363- 370 ZHU De-xiang, ZHANG Zhi-rong, WU Cheng-sheng, et al Uncertainty analysis in ship CFD and the primary application of ITTC procedures[J]. Chinese Journal of Hydrodynamics, 2007, 22 (3): 363- 370
[25]
周广利, 黄德波, 李凤来 船模拖曳阻力试验的不确定度分析[J]. 哈尔滨工程大学学报, 2006, 27 (3): 377- 381 ZHOU Guang-li, HUANG De-bo, LI Feng-lai Uncertainty analysis of ship model towing resistance test[J]. Journal of Harbin Engineering University, 2006, 27 (3): 377- 381
doi: 10.3969/j.issn.1006-7043.2006.03.013
[26]
马向能, 孙张群, 冯骏 测量不确定度分析在操纵性试验中的应用[J]. 船舶力学, 2004, 8 (5): 52- 61 MA Xiang-neng, SUN Zhang-qun, FENG Jun Uncertainty analysis in captive model test[J]. Journal of Ship Mechanics, 2004, 8 (5): 52- 61
doi: 10.3969/j.issn.1007-7294.2004.05.007
[27]
史圣哲, 郑亚雄 潜艇标模阻力试验的不确定度分析[J]. 实验流体力学, 2015, 29 (5): 65- 71 SHI Sheng-zhe, ZHENG Ya-xiong Uncertainty analysis in submarine standard model resistance test[J]. Journal of Experiments in Fluid Mechanics, 2015, 29 (5): 65- 71